Использование: область машиностроения, а именно, прикладная электромеханика, в частности, устройства для поддержания вращающихся деталей во взвешенном состоянии.
Известен способ аналогового управления электромагнитным подвесом вращающихся роторов, реализованный с помощью электромагнитной опоры [1. Патент РФ №2037684, 17.08.92], в которой каждый из восьми полюсов электромагнитной опоры содержит по две катушки с обмоткой подмагничивания и обмоткой управления. Наличие двух катушек на каждом полюсе существенно усложняет систему питания электромагнитов, так как требует два источника питания для каждого полюса - один, для катушек с обмоткой подмагничивания, а другой, для катушек с обмоткой управления. Питание электромагнитов требует аналогового звена, плавно изменяющего напряжение на управляющих обмотках, а значит, соответственно, и силу притяжения электромагнитов. Такие управляемые источники питания обладают низкой экономичностью. КПД таких устройств на рабочих режимах не превышает 65-70% [2. В.Г.Гусев, Ю.М.Гусев, Электроника: Учеб. пособие, - 2-е изд. перераб. и доп. - М.: Высш. шк. 1991. - с.317].
Такие же недостатки присущи способу аналогового управления электромагнитным подвесом, реализованному в магнитном подвесе ротора устройства [3. Патент РФ RU 2037685, 19.06.95].
Наиболее близким техническим решением к предлагаемому является способ дискретного управления электромагнитным подшипником [4. Патент UA 23257 А, F 16 C 32/04, 23.12.1993]. Он заключается в том, что выбирают величину напряжения, подаваемого на катушки с обмотками управления, определяют факт прохождения опорных шеек ротора через зафиксированный уровень отклонения относительно оси статора, принятый за нулевой, и подают или снимают напряжения на катушки с обмотками управления. Необходимая жесткость регулирования достигается за счет использования управляющих обмоток с малыми постоянными времени. Датчики положения используют в дискретном режиме для контроля отклонения от нулевого уровня без регистрации величины рассогласования, а также направления движения ротора. Энергия, сообщаемая вывешиваемому ротору, пропорциональна времени воздействия электромагнитной силы. В результате ротор совершает колебательное движение вокруг нулевого уровня. Амплитуда и частота этого движения зависит от общей постоянной времени системы регулирования и питания электромагнитов.
Этот способ имеет следующие недостатки:
1. Узкий диапазон устойчивости системы автоматического управления из-за наличия только одной ступени регулирования (при прохождении ротора через среднее положение ротора в зазоре) и отсутствие пропорциональных регулирующих цепочек. Это может привести к неустойчивому движению ротора, особенно, при случайном характере внешних возмущающих воздействий, а также, когда ротор находится в газовой среде (воздух, углекислый, топливный газы и т.п.) или в других случаях, когда система в целом обладает слабой демпфирующей способностью.
2. Отсутствуют параметры подстройки и поэтому способ не позволяет создать самонастраивающуюся систему автоматического регулирования.
3. Удорожание всей системы управления и повышенные энергетические затраты за счет наличия катушек подмагничивания и катушек регулирования, требующих не менее двух гальванически развязанных источников питания для каждого полюса с индивидуальным регулированием тока подмагничивания на всех 16 катушках в случае двухопорного ротора.
4. Применение низковольтных источников питания с потребляемым током в сотни ампер для обеспечения необходимого усилия притяжения электромагнитов снижает КПД системы электропитания катушек с обмотками регулирования из-за необходимости, чтобы катушки регулирования обладали очень малой постоянной времени, а значит и малой индуктивностью [5. Таев И.С. Электрические аппараты автоматики и управления. Учебн. Пособие для втузов. М., " Высш. школа", 1975, с.64 формула 2.34].
Целью предлагаемого изобретения является повышение быстродействия, расширение диапазона устойчивости системы автоматического регулирования по отношению к различным возмущающим воздействиям для создания экономичной самонастраивающейся системы регулирования.
5. Поставленная цель достигается тем, что в известный способ [4] дискретного управления электромагнитным подшипником, который заключается в том, что выбирают величину напряжения, подаваемого на катушки с обмотками управления, определяют факт прохождения опорных шеек ротора через зафиксированный уровень отклонения относительно оси статора, принятого за нулевой, и подают или снимают напряжения на катушки с обмотками управления, вводят новые операции, а именно: подбором индуктивности катушек добиваются того, чтобы подъем ротора из крайнего нижнего положения в крайнее верхнее происходил до окончания нарастания тока в катушках с обмотками управления, специальным образом выбирают и задают m фиксированных уровней отклонений от нулевого уровня, 2m величин скоростей движения шеек ротора, 2m пороговых значений разности токов в диаметрально противоположных катушках с обмотками управления, через каждый одинаковый промежуток времени определяют токи во всех катушках с обмотками управления, в направлениях управляемых степеней свободы все отклонения от нулевого уровня и скорости движения шеек ротора, при переходе ротора через один из m уровней, формируют вектор управляющих воздействий, состоящий из бинарных компонент, воздействуют компонентами вектора на исполнительное устройство, которое в соответствии со значениями бинарных компонент вектора управляющих воздействий одновременно подает или снимает напряжения на все катушки с обмотками управления.
Предложенный способ и реализующее его устройство показано на фиг.1-5.
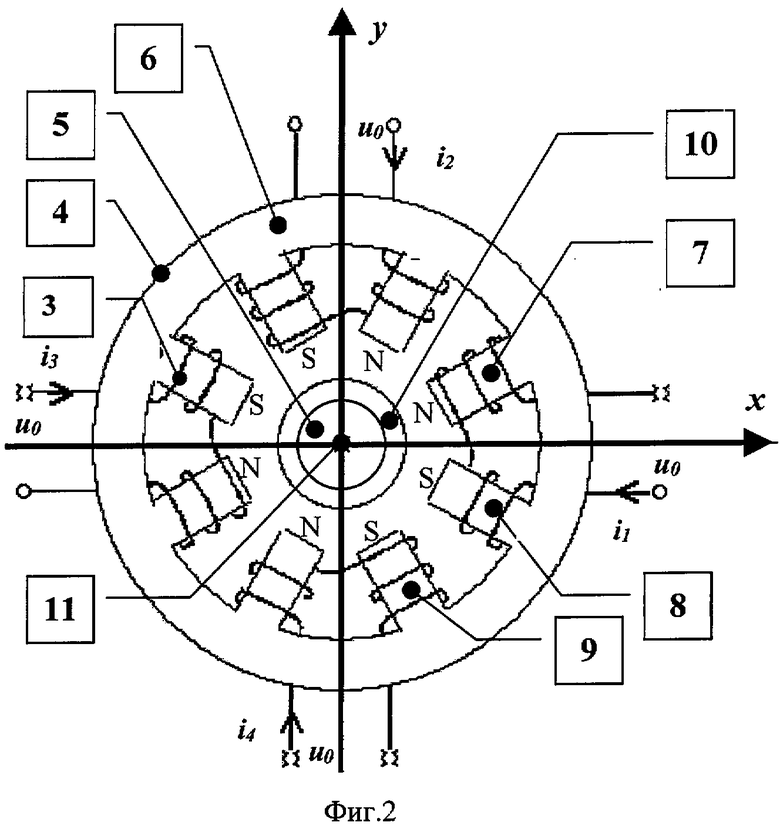
На фиг.1 показана обобщенная схема взаимного расположения ротора с двумя магнитными опорами.
На фиг.2 представлен эскиз поперечного сечения магнитной опоры.
На фиг.3 дана схема разбивки зазора в одном из направлений управляемой поступательной степени свободы.
На фиг.4 представлена общая логическая блок-схема алгоритма выбора управляющих воздействий при импульсном питании катушек с обмотками управления в одном из направлений управляемой поступательной степени свободы.
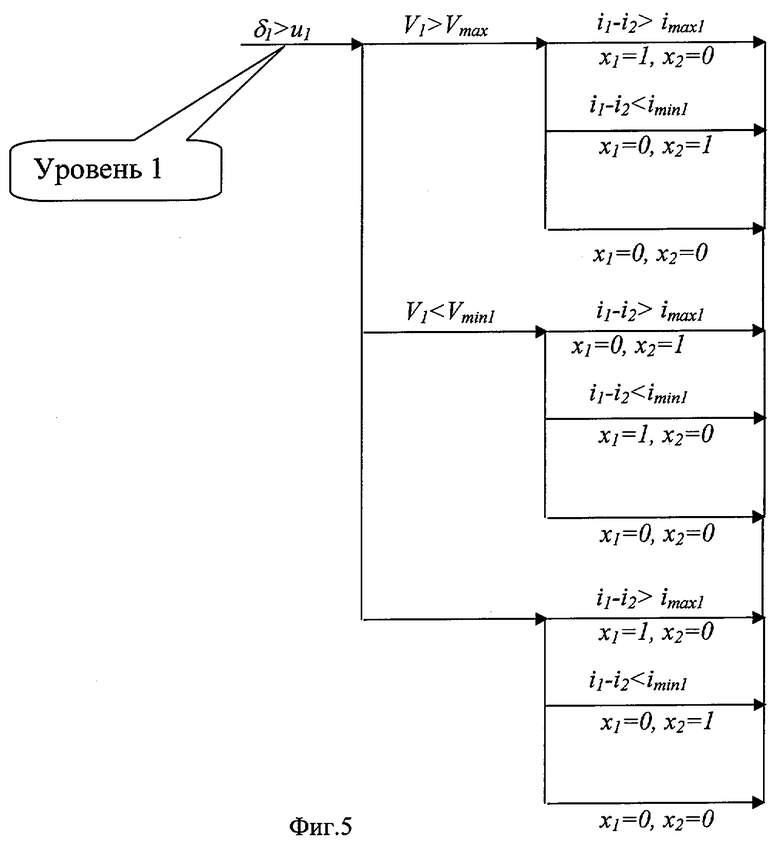
На фиг.5 представлена логическая блок-схема алгоритма выбора управляющих воздействий при переходе через один из фиксированных уровней отклонения от нулевого уровня.
Описание предлагаемого способа совместимо с описанием устройства для его реализации. Устройство представляет собой электромеханическую систему, состоящую из ротора 1 (фиг.1) и К (К=2, 3...) магнитных опор 2. В состав магнитных опор 2 входят катушки с обмотками управления 3. Конструкция всех магнитных опор 2 одинакова. Магнитная опора 2 (фиг.2) состоит из статора 4 и опорной шейки 5 ротора 1. Статор 4 в виде кольцевого магнитопровода 6 с 8k (k=1, 2...) равномерно расположенными по окружности полюсами 7, 8, 9, на которых установлено по одной катушке с обмоткой управления 3. Каждая смежная пара катушек с обмотками управления 3 при подаче напряжения имеет противоположно намагниченные полюса 7, 8 (N, S), а намагниченность смежного полюса 9 (S) от следующей пары катушек с обмотками управления 3 одинакова. На опорной шейке 5 ротора 1 расположен магнитопровод 10 в виде ферромагнитного кольца с зазором относительно полюсов статора 4. Через геометрический центр осевой симметрии поперечного сечения статора 4 проходит система координат 11 (x, y, z). Ось z показана на фиг.1.
На фиг.3 дана схема разбивки зазора между наружной цилиндрической поверхностью магнитопровода 10 опорной шейки ротора 5 и полюсами кольцевого магнитопровода 6 в вертикальном направлении. Обозначенный штрихпунктирной линией уровень 12 отклонения относительно оси 13 статора 4 принят за нулевой. В общем случае он может не совпадать с осью 13 системы координат 11. Фиксированные уровни 14 отклонений относительно оси 13 статора 4, выбранные по специальной методике, обозначены сплошными тонкими линиями. Штриховыми линиями 15 и 16 обозначены границы зазора, линиями 17, 18 обозначены крайние фиксированные уровни.
Способ осуществляется следующим образом. Выбирают величину напряжения u0, подаваемого на катушки с обмотками управления 3. Индуктивность катушек с обмотками управления 3 подбирают так, чтобы подъем шейки 5 ротора 1 из крайнего нижнего положения в крайнее верхнее происходил до окончания нарастания тока в катушке с обмоткой управления 3.
Выбирают и задают:
- m фиксированных уровней 14 (фиг.3) отклонений от нулевого уровня 12,
- m фиксированных значений скоростей движения шеек 5 ротора 1 в положительном направлении управляемой поступательной степени свободы;
- m фиксированных скоростей движения шеек 5 ротора 1 в отрицательном направлении управляемой поступательной степени свободы;
- m фиксированных максимальных пороговых значений разности токов в диаметрально противоположных катушках с обмотками управления 3;
- m фиксированных минимальных пороговых значений разности токов в диаметрально противоположных катушках с обмотками управления 3.
Выбор фиксированных уровней 14 можно осуществлять двумя путями:
- использованием математической теории оптимизации [6. Г.Реклейтис, Рейвиндран А., Рэгсдел К. Оптимизация в технике. В 2-х кн. Кн.2. Пер. с англ. - М., Мир, 1986. - с.53], когда выбор необходимых уровней вычисляется из условий минимума среднеквадратического отклонения шеек 5 ротора 1 от нулевого уровня 12 за заданный промежуток времени;
- выбором монотонных и однозначных функциональных зависимостей, содержащих постоянные коэффициенты и функцию номера уровня,
yn=a[f(bn+c)]s+d,
где f(n) - функция целочисленного аргумента n, где n=1-m - номер уровня 14 (фиг.3), a, b, c, d, s - коэффициенты (a, b, c, d - рациональные числа, s - натуральное число).
К функциям f(n), отвечающим требованиям, накладываемым на функциональную зависимость, можно отнести: х, sin, cos, tan, sinh, tanh, log, - log. Такой способ позволяет снизить количество коэффициентов, подлежащих выбору, и упростить алгоритм их оптимального поиска из условий минимума среднеквадратического отклонения шеек 5 ротора 1 от нулевого уровня 12.
Аналогично выбираются 2m величин скоростей движения шеек 5 ротора, 2m пороговых значений разности токов в диаметрально расположенных катушках с обмотками управления 3.
Последовательность операций при работе системы управления в направлении одной из управляемых поступательных степеней свободы показана на фиг.4, 5 в виде графа, нагруженного по дугам [7. Вельбицкий И.В. Технология программирования. -.К.: Техника, 1984. -: с.15].
На фиг.4, 5 приняты следующие обозначения:
δj - текущее отклонение шейки 5 ротора 1 от нулевого уровня 12 в направлении управляемой степени свободы j (j=1...k; k<5);
Vj - текущая скорость движения шейки 5 ротора 1 в направлении j-й управляемой степени свободы;
yn - n-й фиксированный уровень отклонения относительно нулевого уровня 12 в направлении одной из поступательных степеней свободы;
Vmaxn, Vminn - n-е фиксированные уровни скоростей движения шейки 5 ротора 1 в положительном и отрицательном направлениях одной из поступательных степеней свободы соответственно;
imax n - n-е фиксированное максимальное пороговое значение разности токов в диаметрально противоположных катушках с обмотками управления 3;
imin n - n-е фиксированное минимальное пороговое значение разности токов в диаметрально противоположных катушках с обмотками управления 3;
i1, i2 - токи соответственно в верхней и нижней парах катушек с обмотками управления 3 (ближайших к оси у);
x1, x2 - выходные сигналы системы управления, они же бинарные компоненты вектора управляющих воздействий (x1, =x2,=1 - соответствует подаче на нижние и верхние катушки с обмотками управления 3 питающего напряжения u0, x1, =x2, =0 соответствует отключению нижних и верхних катушек с обмотками управления 3).
Для любой управляемой поступательной степени свободы последовательность операций одинакова. Изменение состояния диаметрально противоположных катушек с обмотками управления 3 происходит на нескольких (например, одиннадцати) предварительно заданных уровнях отклонений 14 шейки 5 ротора 1 относительно нулевого уровня 12 в направлении одной из поступательных степеней свободы.
При положении шейки 5 ротора 1 между выбранными уровнями состояние катушек с обмотками управления 3 не изменяется.
При переходе шейки 5 ротора 1 из одного интервала между уровнями в другой, происходит переход системы управления в одно из четырех возможных состояний (фиг.5) в соответствии со следующими четырьмя бинарными векторами управляющих воздействий (компоненты таких векторов состоят из нулей и единиц):
Вектор W1T={x1=1, x2=0;}
Вектор W2T={x1=0, x2=1;};
Вектор W3T={x1=0, x2=0;};.
Вектор W4T={x1=1, x2=1;}, где T - знак транспонирования вектора в строку
Через каждый фиксированный промежуток времени определяют токи во всех катушках с обмотками управления 3, а в направлениях управляемых степеней свободы все скорости движения шеек 5 ротора 1 и отклонения от нулевого уровня 12. При переходе шейки 5 ротора 1 через один из m уровней, формируют состоящий из бинарных компонент вектор управляющих воздействий и воздействуют его компонентами на исполнительное устройство, которое в соответствии со значениями бинарных компонент вектора управляющих воздействий одновременно подает или снимает напряжения на все катушки с обмотками управления 3.
Так как при цифровом анализе состояния ротора 1 с токами в катушках с обмотками управления 3, отклонениями и скоростями шеек 5 ротора 1, переведенных в целочисленную цифровую форму, проводятся только быстродействующие логические операции, то для получения вектора управляющих воздействий возможно использование микропроцессоров с относительно низкой тактовой частотой (64 МГц и более).
Скорость нарастания напряжений на включенных катушках с обмотками управления 3 ограничивается временем открытия транзисторных ключей в устройстве управления, выполненном, например, по схеме мощного усилительного каскада [2. В.Г.Гусев, Ю.М.Гусев, Электроника: Учеб. пособие, - 2-е изд. перераб. и доп. - М.: Высш. шк. 1991. - с.307], (устройство управления на фигурах не показано). Эта скорость несоизмеримо больше скорости нарастания тока в катушках с обмотками управления 3, поэтому возникает возможность при дискретной работе системы управления относительно плавно регулировать ток в катушках с обмотками управления 3. Регулировка величины тока в катушках с обмотками управления 3 обеспечивается временем удержания управляющего напряжения на катушках с обмотками управления 3. Абсолютные величины точности и плавности регулировки тока определяются скоростью нарастания тока за время между дискретными актами отсчета положения шеек 5 ротора 1. Относительные величины точности и плавности регулировки тока изменяются по мере нарастания тока в катушках с обмотками управления 3. Таким образом, система управления обладает свойствами пропорционального регулятора [8. У.Титце, Л.Шенк, Полупроводниковая схемотехника: Справочное руководство. Пер. с нем. - М.: Мир, 1982. - с.480], что повышает ее устойчивость по сравнению с релейной одноуровневой системой управления прототипа. Регулировка жесткости опор 2 обеспечивается изменением времени одновременной работы диаметрально противоположных катушек с обмотками управления 3.
К дополнительным преимуществам предлагаемого способа дискретного управления электромагнитным подвесом вращающихся роторов можно отнести следующие:
- Экономичность системы управления за счет применения импульсного питания катушек с обмотками управления 3, так как реализация такого питания обеспечивается использованием экономичных транзисторных импульсных усилителей мощности, работающих в режиме насыщенных ключей [2. В.Г.Гусев, Ю.М.Гусев, Электроника: Учеб. пособие, - 2-е изд. перераб. и доп. - М.: Высш. шк., 1991. - с.505]. Экономичность системы управления еще больше повышается из-за отсутствия катушек с обмотками подмагничивания, так как отпадает необходимость в отдельных блоках питания для них.
- Возможность настройки системы управления в процессе проектирования и доводки методами математической теории оптимизации позволяет создать процедуры автоматической подстройки системы управления в процессе эксплуатации на натурном роторе в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прямого бездатчикового управления угловым положением ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2749454C1 |
| ДЕВЯТИФАЗНАЯ 2P=2- ПОЛЮСНАЯ ОБМОТКА ПРИ Z=54 ПАЗАХ | 2002 |
|
RU2227360C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ДВИГАТЕЛЬ | 2000 |
|
RU2176844C2 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2009599C1 |
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| М-ФАЗНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2113755C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2084070C1 |


Изобретение относится к области машиностроения, а именно к прикладной электромеханике, в частности к устройствам для поддержания вращающихся деталей во взвешенном состоянии. Способ дискретного управления электромагнитным подшипником заключается в том, что выбирают величину напряжения, подаваемого на катушки с обмотками управления, определяют факт прохождения опорных шеек ротора через зафиксированный уровень отклонения относительно оси статора и подают или снимают напряжения на катушки с обмотками управления. При подборе индуктивности катушек подъем ротора происходит до окончания нарастания тока в катушках с обмотками управления. Выбирают и задают m фиксированных уровней отклонений от нулевого, 2m величин скоростей движения шеек ротора, 2m пороговых значений разности токов в диаметрально противоположных катушках с обмотками управления. Через одинаковый промежуток времени определяют токи во всех катушках, все отклонения от нулевого управления и скорости движения шеек ротора при переходе ротора через один из m уровней. Формируют управляющие воздействия на исполнительное устройство, которое в соответствии со значениями управляющих воздействий одновременно подает или снимает напряжения на все катушки с обмотками управления. Технический результат - повышение быстродействия и расширение диапазона устойчивости системы автоматического регулирования. 5 ил.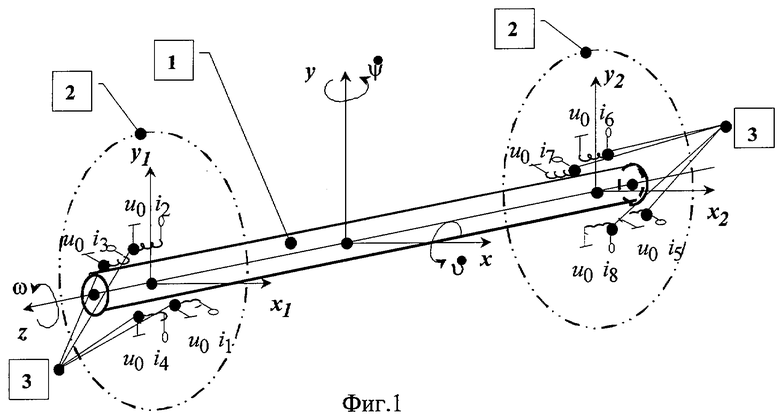
Способ дискретного управления электромагнитным подшипником, который заключается в том, что выбирают величину напряжения, подаваемого на катушки с обмотками управления, определяют факт прохождения опорных шеек ротора через зафиксированный уровень отклонения относительно оси статора, принятого за нулевой, и подают или снимают напряжения на катушки с обмотками управления, отличающийся тем, что подбором индуктивности катушек добиваются того, чтобы подъем ротора из крайнего нижнего положения в крайнее верхнее происходил до окончания нарастания тока в катушках с обмотками управления, выбирают и задают m фиксированных уровней отклонений от нулевого уровня, 2m величин скоростей движения шеек ротора, 2m пороговых значений разности токов в диаметрально противополжных катушках с обмотками управления, через каждый одинаковый промежуток времени определяют токи во всех катушках с обмотками управления, все отклонения от нулевого управления и скорости движения шеек ротора при переходе ротора через один из m уровней, формируют управляющие воздействия на исполнительное устройство, которое в соответствии со значениями управляющих воздействий одновременно подает или снимает напряжения на все катушки с обмотками управления.
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| US 3860300, 14.01.1975 | |||
| Способ дозирования сыпучего материала и устройство для его осуществления | 1987 |
|
SU1530918A1 |
| DE 4040788, 17.06.1992. | |||

