Группа изобретений относится к диагностике аппаратов пневматического тормозного привода тормозов автотранспортных средств и может быть использована для проверки пневмоаппаратов, используемых в других областях техники.
Известен способ функционального диагностирования аппаратов пневматического тормозного привода модели НИАТ-Л029 с использованием устройства переносного проверочного прибора, содержащего два механических манометра, соединительные головки и шланги. Для диагностирования к контрольному выходу проверяемого пневмоаппарата с помощью соединительной головки и соединительного шланга подключают контрольный манометр, к входу в пневмоаппарат подключают манометр, а к органу управления проверяемого пневмоаппарата медленно в течение 3-10 секунд, дискретно прикладывают усилие до достижения давлением на выходе из пневмоаппарата заданной величины. По манометрам оценивается давление на выходе пневмоаппарата. Сравнивая давление на выходе пневмоаппарата с нормативными значениями, делается вывод о исправности пневмоаппарата (см. Гуревич Л.В., Меламуд Р.А. Пневматический тормозной привод автотранспортных средств. М.: Транспорт, 1988, стр.202).
Недостатками известного способа являются ограниченная информативность и высокая трудоемкость.
Известен способ диагностирования аппаратов пневматического тормозного привода с использованием проверочной установки К235, состоящей из пяти манометров и пяти соединительных шлангов. Установку навешивают на дверь автомобиля, затем проводят диагностику пневмопривода способом, описанным выше (см. Гуревич Л.В., Меламуд Р.А. Пневматический тормозной привод автотранспортных средств. М.: Транспорт, 1988, стр.202).
Основным недостатком этих способов является то, что они не позволяют определить динамические свойства регулятора тормозных сил, а следовательно, определить исправность регулятора тормозных сил в условиях экстренного торможения.
Известен способ функционального диагностирования контуров, который заключается в следующем: диагностируемый аппарат закрепляют на стенде, вход и выход аппарата соединяют с манометрами. В начале испытаний трижды открывают и закрывают кран, давление на входе должно изменяться от 0 до 0,75 МПа. Дискретно повышая давление от 0 до 0,75 МПа, контролируют давление по манометрам на входе и выходе в восьми характерных точках, затем дискретно понижают давление от 0,75 до 0 МПа и также контролируют по манометрам давление на входе и выходе в аппарат (см. Гуревич Л.В., Меламуд Р.А. Пневматический тормозной привод автотранспортных средств. М.: Транспорт, 1988, стр.202).
Существенным недостатком способа функционального диагностирования контуров является малая информативность, так как он не обеспечивает оценку важнейшего качества привода - его быстродействие.
Известен аппарат К - 245, состоящий из шести манометров, двух регуляторов давления, мультипликатора, крана мультипликатора, предохранительного клапана, рессиверов, обратного клапана, фильтра влагоотделителя, крана управления, контрольного рессивера. Для диагностирования пневмоаппарат устанавливают на стенде (см. Гуревич Л.В., Меламуд Р.А. Пневматический тормозной привод автотранспортных средств. М.: Транспорт, 1988, стр.202).
Недостатком этого устройства является то, что в процессе диагностирования оно не позволяет оценить быстродействие привода.
Наиболее близким по технической сущности к предлагаемому изобретению является способ диагностирования аппаратов пневматического тормозного привода, который заключается в прикладывании усилия к крану подвода рабочего тела с помощью пневматического устройства, время открытия крана лежит в интервале от 0,2 до 60 секунд, а давление на входе и выходе пенвмоаппарата измеряют с помощью электрических датчиков давления, передающих информацию в ЭВМ для регистрации давления рабочего тела на входе и выходе пневмоаппарата в 330 точках возрастания или снижения давления, и сравнивают результаты измерений для определения конкретной неисправности пневмоаппарата (см. патент №2139506, МПК 6 G 01 L 5/28, Бюл №28, 1999 г.).
Недостатком данного способа является то, что он позволяет оценить техническое состояние пневмоаппаратов с одним управляющим сигналом, т.е. давление на выходе зависит от давления на входе в пневмоаппарат, что не достаточно для определения неисправности регулятора тормозных сил в условиях экстренного торможения.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство диагностирования аппаратов пневматического тормозного привода, содержащее измерительные приборы - манометры, приемный и накопительный ресиверы, регуляторы давления, соединительные шланги и кран подвода рабочего тела, ЭВМ IBM PS с блоком АЦП-ЦАП, соединенным с блоком преобразователей, к которому подсоединены измеритель интервалов времени, реле времени, датчики входного и выходного давления, датчик перемещения рычага крана подвода рабочего тела и пневматический клапан, а также тормозную камеру и дроссель, соединенные с краном подвода рабочего тела (см. патент №2139506, МПК 6 G 01 L 5/28, Бюл №28, 1999 г.).
Недостатком данного устройства является то, что оно не позволяет диагностировать пневмоаппараты, работающие по двум управляющим сигналам, входному давлению и перемещению управляющего органа, и производить их регулировку в динамическом режиме.
Заявленная группа изобретений направлена на решение единой задачи, заключающейся в определении неисправности регулятора тормозных сил и его регулировки.
Технический результат предлагаемого изобретения - это повышение безопасности движения автотранспортных средств в процессе торможения.
Для достижения обеспечиваемого изобретением технического результата в способе диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом, заключающимся в прикладывании к рычагу регулятора тормозных сил усилия, измерении давления на входе и выходе регулятора тормозных сил в нескольких точках с помощью электрических датчиков давления, передающих информацию в ЭВМ для регистрации давления, и сравнении результатов измерений, согласно изобретению к рычагу регулятора тормозных сил прикладывают знакопеременное усилие с помощью электромеханического устройства, угол поворота рычага регулятора тормозных сил измеряют электрическим датчиком угла поворота, передающим информацию в ЭВМ для регистрации положения рычага регулятора тормозных сил в 500 точках, а конкретную неисправность регулятора тормозных сил определяют по изменению выходного давления от угла поворота рычага регулятора тормозных сил.
Для реализации предложенного способа в известном устройстве диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом, содержащем измерительные манометры, приемный и накопительный ресиверы, регуляторы давления, соединительные шланги, кран подвода рабочего тела, ЭВМ с блоком АЦП, блок преобразователей, реле времени, датчики входного и выходного давления, тормозную камеру, пневмоклапан, согласно изобретению содержит электромеханическое устройство, которое посредством маятника и штанги соединено с рычагом регулятора тормозных сил, на оси вращения которого установлен электрический датчик угла поворота, соединенный с блоком преобразователей; кроме того, устройство снабжено управляющим устройством, а к нему подсоединены электромеханическое устройство, электромагнитный пневмоклапан, блок АЦП и реле времени.
Именно заявляемая совокупность конструктивных признаков обеспечивает согласно способу диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом по двум управляющим сигналам, а именно по изменению выходного давления от угла поворота рычага регулятора тормозных сил, производить диагностирование и регулировку в динамическом режиме, которая учитывает техническое состояние регулятора тормозных сил и самого автомобиля.
Отличительной особенностью предлагаемого способа диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом является:
- прикладывание знакопеременного усилия к рычагу регулятора тормозных сил с помощью электромеханического устройства позволит обеспечить режим работы регулятора тормозных сил в реальных условиях работы на автомобиле;
- измерение угла поворота рычага регулятора тормозных сил электрическим датчиком угла поворота, передающим информацию в ЭВМ для регистрации положения рычага регулятора тормозных сил в 500 точках, и измерение изменяющегося входного, выходного давления регулятора тормозных сил позволит провести диагностику регулятора тормозных сил, выявить его конкретную неисправность и произвести регулировку. Отличительной особенностью предлагаемого устройства является:
- электромеханическое устройство, маятник, который соединен со штангой, последняя соединена другим своим концом с рычагом регулятора тормозных сил, что позволит создавать различные режимы работы регулятора тормозных сил автомобиля;
- электрический датчик угла поворота, установленный на оси вращения рычага регулятора тормозных сил, обеспечивает измерение угла поворота рычага в 500 точках;
- управляющее устройство, соединенное с электромеханическим устройством, электромагнитным пневмоклапаном, АЦП и реле времени, обеспечивает синхронизацию работы всего устройства.
Заявленная группа изобретений соответствует требованию единства изобретения, поскольку группа разнообъектных изобретений образует единый изобретательский замысел, причем один из заявляемых объектов группы - способ диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом, предназначен для использования в другом заявленном объекте группы - устройстве для диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом, при этом оба объекта направлены на решение одной и той же задачи - определение неисправности регулятора тормозных сил и его регулирования в динамическом режиме с получением единого технического результата, заключающегося в повышении безопасности движения автотранспортных средств.
Из уровня техники авторам не известны технические решения, содержащие совокупность признаков, сходных или эквивалентных заявляемым, что позволяет сделать вывод о соответствии предполагаемой группы изобретений критериям "новизна" и "изобретательский уровень".
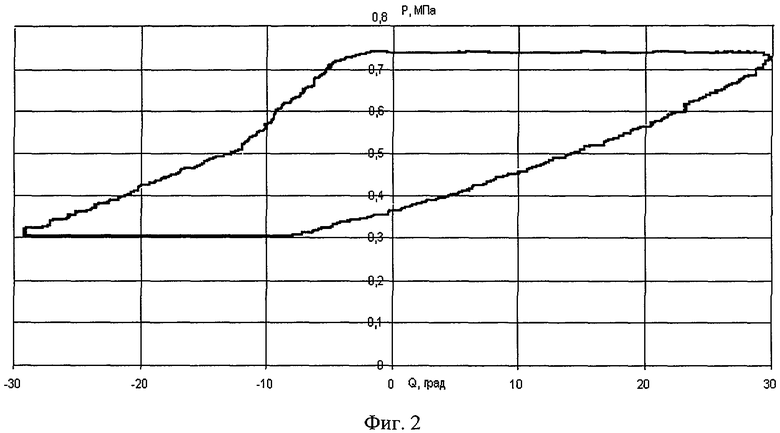
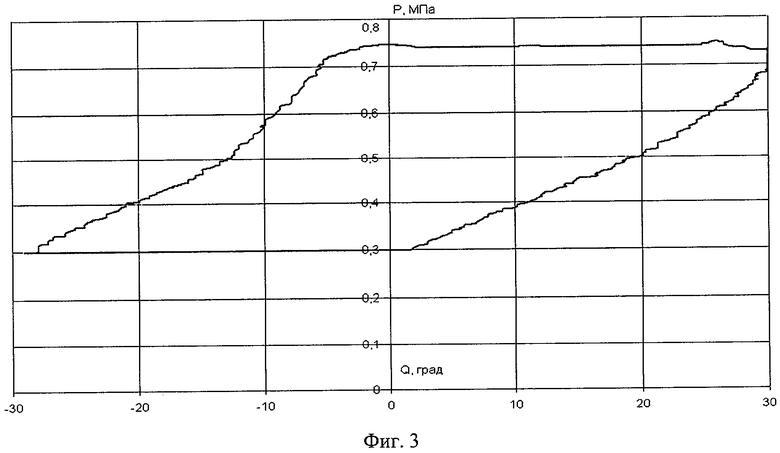
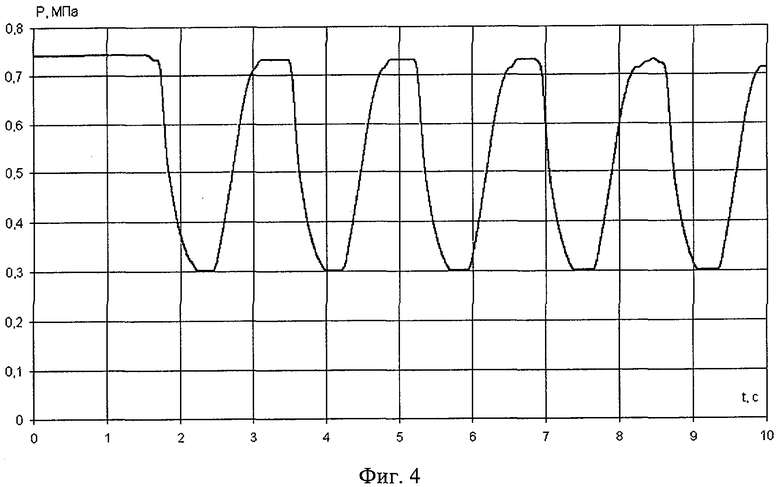
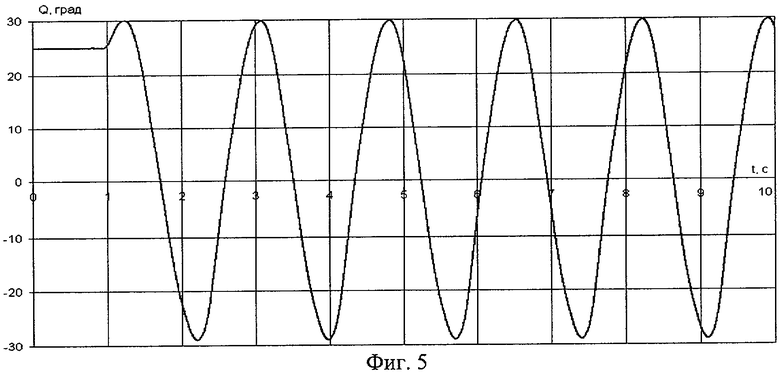
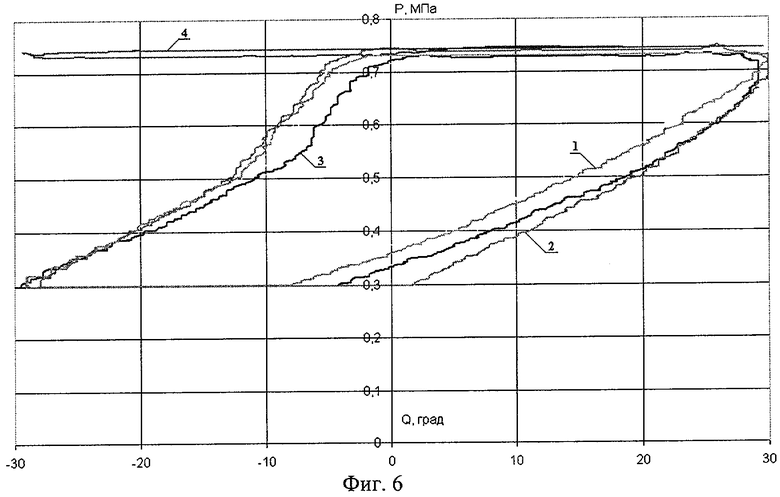
Сущность изобретения поясняется чертежами, где на фиг.1 изображено устройство для диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом; на фиг.2 изображен график зависимости давления на выходе из регулятора тормозных сил от угла поворота рычага регулятора тормозных сил для исправного регулятора тормозных сил; на фиг.3 изображен график зависимости: давления на выходе из регулятора тормозных сил от угла поворота рычага регулятора тормозных сил для неисправного регулятора тормозных сил; на фиг.4 изображен график зависимости давления на выходе из регулятора тормозных сил от времени; на фиг.5 изображен график зависимости угла поворота рычага регулятора тормозных сил от времени; на фиг.6 изображены графики зависимости давления на выходе из регулятора тормозных сил от угла поворота рычага регулятора тормозных сил для исправного и неисправных регуляторов тормозных сил
Предлагаемый способ реализован в устройстве для диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом, которое содержит персональный компьютер ЭВМ AMD Athlon 1 (1100 МГц, оперативная память 128 Mb, жесткий диск 20 Gb) с установленным аналого-цифровым преобразователем 2 - АЦП (L-154, L-card), при этом ЭВМ 1 подключен к сети питания 220 В (на фиг.1 не указано). АЦП 2 соединен восемью выходами с блоком преобразователей 3 и с управляющим устройством 4. Реле времени 5 соединено с управляющим устройством 4, последнее соединено проводами с электромеханическим устройством 6 привода рычага 7 регулятора тормозных сил 8, электромагнитным пневмоклапанном 9 и АЦП 2 для синхронизации работы всех этих устройств с помощью одной кнопки на реле времени 5. Блок преобразователей 3 соединен с датчиком входного давления 10, датчиком выходного давления 11 и датчиком угла поворота 12 рычага 7 регулятора тормозных сил 8. Реле времени 5 подключено к сети питания 220 В (на фиг.1 не указано). Датчики входного 10, выходного 11 давления и датчик угла поворота 12 рычага 7 регулятора тормозных сил 8 подключены к сети питания 12 В (на фиг.1 не показано). Электромагнитный пневмоклапан 9 подключен к сети питания 24 В (на фиг.1 не показано). Два регулятора давления 13 подсоединены шлангами к компрессору (на фиг.1 не показано), а их выходы соединены с накопительными ресиверами 14 и 15. Накопительный ресивер 14 соединен посредством шлангов с выходом крана подвода рабочего тела 16. Накопительный ресивер 15 соединен с тормозной камерой 17. Между накопительным ресивером 15 и тормозной камерой 17 установлен электромагнитный пневмоклапан 9. Шток тормозной камеры 17 соединен с рычагом крана подвода рабочего тела 16. Выход крана подвода рабочего тела 16 соединен с входом проверяемого регулятора тормозных сил 8, а между ними последовательно установлены механический манометр 18 и датчик входного давления 10. Выход проверяемого регулятора тормозных сил 8 соединен с приемным ресивером 19, а между ними установлен датчик выходного давления 11. Для контролирования давления приемный ресивер 19 соединен с механическим манометром 20. Маятник 21 электромеханического устройства 6 соединен со штангой 22, которая другим концом соединена с рычагом 7 регулятора тормозных сил 8. На ось вращения 23 рычага 7 установлен датчик угла поворота 12 для измерения угла поворота рычага 7 регулятора тормозных сил 8 в 500 точках.
Способ диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом осуществляется следующим образом.
Диагностируемый регулятор тормозных сил 8 устанавливают на испытательном стенде. К входу регулятора тормозных сил 8 присоединяют датчик входного давления 10, к выходу - датчик выходного давления 11, а на ось вращения 23 рычага 7 регулятора тормозных сил 8 устанавливают датчик угла поворота 12. К установке на испытательном стенде подают сжатый воздух и с помощью двух регуляторов давления 13 в накопительных ресиверах 14, 15 устанавливают давление 0,75 МПа. Включают ЭВМ 1. Подключают источники питания. На реле времени 5 задают время наполнения регулятора тормозных сил 8 сжатым воздухом и время работы электромеханического устройства 6, с помощью которого прикладывают знакопеременное усилие к рычагу 7 регулятора тормозных сил 8. С помощью реле времени 5 передают через управляющее устройство 4 электрический сигнал на электромагнитный пневмоклапан 9, электромеханическое устройство 6 и сигнал синхронизации для запуска программы "Oscillograf" на ЭВМ 1 через АЦП 2. Электромагнитный пневмоклапан 9 открывается и сжатый воздух, содержащийся в накопительном ресивере 15 под давлением 0,75 МПа, поступает в тормозную камеру 17. Шток тормозной камеры 17 воздействует на рычаг крана подвода рабочего тела 16 и открывает его за время 0,2 с. Происходит наполнение регулятора тормозных сил 8 сжатым воздухом. Маятник 21 электромеханического устройства 6 начинает вращаться и приводит в движение рычаг 7 регулятора тормозных сил 8 от одного крайнего положения в другое через штангу 22. Кран подвода рабочего тела 16 открывается, и сжатый воздух, проходя через датчик входного давления 10, поступает в диагностируемый регулятор тормозных сил 8 - происходит процесс наполнения диагностируемого регулятора тормозных сил 8 рабочим телом. По истечении времени, задаваемого при помощи реле времени 5, последнее прекращает подачу электрического сигнала в управляющее устройство 4, которое отключает электромагнитный пневмоклапан 9 и электромеханическое устройство 6. Электромагнитный пневмоклапан 9 закрывается, кран подвода рабочего тела 16 закрывается, прекращается подача сжатого воздуха, а воздух из приемного ресивера 19, проходя через датчик выходного давления 11, диагностируемый регулятор тормозных сил 8, выходит в атмосферу через атмосферный выход регулятора тормозных сил 8 - происходит процесс опорожнения диагностируемого регулятора тормозных сил 8 за время 1,2 с. Датчики входного 10 и выходного 11 давления отслеживают изменение давления в процессе наполнения, опорожнения регулятора тормозных сил 8 и изменение выходного давления от угла поворота рычага 7 в результате его перемещения из одного крайнего положения в другое. Датчиком угла поворота 12 измеряют угол поворота рычага 7 регулятора тормозных сил 8 при отслеживании его положения. Датчики входного 10, выходного 11 давления и датчик угла поворота 12 рычага 7, отслеживая изменение давления на входе, выходе регулятора тормозных сил 8 и изменение угла поворота рычага 7 в 500 точках, преобразуют изменения измеряемых величин в изменение сопротивления, пропорциональное воспроизводимому давлению и углу поворота, и передают в блок преобразователей 3, который преобразует эти сигналы в эквивалентные электрические сигналы и передает их в блок АЦП 2. Блок АЦП 2 переводит эти сигналы в двоичные коды и передает в ЭВМ 1. ЭВМ 1 регистрирует изменение давления на входе и выходе регулятора тормозных сил 8 от угла поворота рычага 7 в 500 точках и строит графики зависимостей давления на выходе из регулятора тормозных сил 8 от времени наполнения и опорожнения (см. фиг.4), угла поворота рычага 7 регулятора тормозных сил 8 от времени (см. фиг.5), давления на выходе из регулятора тормозных сил 8 от угла поворота рычага 7 для исправного (см. фиг.2) и для неисправного (см. фиг.3). Обработку результатов испытаний проводят следующим образом: в память ЭВМ 1 заложены уравнения регрессии для участков наполнения и опорожнения регулятора тормозных сил 8 рабочим телом для исправного РТС, также заложены сведения о характере проявления различных неисправностей. ЭВМ 1 с помощью программы "Oscillograf" анализирует полученные графики, сравнивает их с уравнениями регрессии и делает заключение о том, исправен или не исправен проверяемый регулятор тормозных сил 8 автомобиля с пневматическим тормозным приводом, а также какая неисправность у него обнаружена.
Пример, подтверждающий конкретное выполнение способа диагностирования путем проведения испытания заведомо исправного и заведомо неисправного лучевого регулятора тормозных сил автомобиля КамАЗ.
Диагностируемый регулятор тормозных сил устанавливают на стенде, его вход и выход соединяют с датчиками входного 10, выходного 11 давления и на ось вращения 23 рычага 7 регулятора тормозных сил 8 устанавливают датчик угла поворота 12.
При помощи регуляторов давления 13 в накопительных ресиверах 14 и 15 устанавливают давление 0,75 МПа. Включают ЭВМ 1 и запускают программу "Oscillograf", которая находится в режиме ожидания и ждет сигнала синхронизации с реле времени 5. Подключают источники питания.
Для диагностирования устанавливают на реле времени 5 время 5 с. Запускают комплекс, нажав клавишу на реле времени 5. С помощью реле времени 5 посылают через управляющее устройство 4 электрический сигнал на электромагнитный пневмоклапан 9, электромеханическое устройство 6 и сигнал синхронизации на ЭВМ 1 для запуска программы "Oscillograf". Электрический пневмоклапан 9 открывается и сжатый воздух из накопительного рессивера 15 поступает в тормозную камеру 17. Шток тормозной камеры 17 воздействует на рычаг крана подвода рабочего тела 16 и открывает его. Сжатый воздух из накопительного ресивера 14, проходя через кран подвода рабочего тела 16, датчик входного давления 10, диагностируемый регулятор тормозных сил 8, датчик выходного давления 11, поступает в приемный ресивер 19. Электромеханическое устройство 6 приводит в движение рычаг 7 регулятора тормозных сил 8. По истечении 5 с. Реле времени 5 прекращает подачу сигнала на электромагнитный пневмоклапан 9 и электромеханическое устройство 6. Электромагнитный пневмоклапан 9 закрывается, закрывается кран подвода рабочего тела 16. Сжатый воздух из приемного ресивера 19, проходя через датчик выходного давления 11, поступает в регулятор тормозных сил 8 и выходит в атмосферу через атмосферный выход регулятора тормозных сил 8. Электромеханическое устройство 6 по истечении 5 с прекращает свою работу, программа "Oscillograf" останавливается. Датчики входного 10 и выходного 11 давления отслеживают изменения давления, датчик угла поворота 12 рычага 7 регулятора тормозных сил 8 отслеживает изменение угла поворота в результате перемещения рычага 7 из одного крайнего положения в другое в 500-х точках. Изменения измеряемых величин преобразуют в изменение сопротивления и передают в блок преобразователей 3. Блок преобразователей 3 преобразует эти сигналы в эквивалентные электрические сигналы и передает их в блок АЦП 2. Блок АЦП 2 переводит электрические сигналы в двоичные коды и передает в ЭВМ 1. ЭВМ 1 строит графики зависимостей давления на выходе регулятора тормозных сил от угла поворота рычага 7 регулятора тормозных сил 8.
Полученные характеристики сохраняют на ЭВМ 1 в виде файлов, затем в ЭВМ 1 включают режим "Диагностика". При этом полученные характеристики сравнивают с уравнениями регрессии для исправного и неисправного регулятора тормозных сил 8, и ЭВМ 1 делает заключение об исправности либо неисправности регулятора тормозных сил 8. Затем испытанный РТС был разобран и проведен микрометраж. Были проверены преднатяг пружин, силы трения поршней, жесткость пружин, техническое состояние резиновых уплотнений, наличие засорений, целостность диафрагмы. Результаты микрометража были проанализированы совместно с полученными характеристиками. Сделано заключение о том, как влияет та или иная неисправность на полученную характеристику. Данные характеристики приведены на фиг.6, где график 1 соответствует исправному регулятору тормозных сил, график 2 указывает на повышенное трение большого поршня, график 3 получен при поломке пружины, график 4 характеризует заклинивание большого поршня регулятора тормозных сил 8.
Предлагаемые способ и устройство могут применяться на станциях диагностики, базах централизованного технического обслуживания автотранспортных средств, предприятиях автомобильного сервиса, на автотранспортных предприятиях, на автосборочных заводах для дифференциальной диагностики технического состояния и контроля регуляторов тормозных сил.
Преимущества предложенного способа диагностирования и регулирования регуляторов тормозных сил автомобилей с пневматическим тормозным приводом и устройства для его осуществления по сравнению с прототипом (см. патент №2139506, МПК 6 G 01 L 5/28, Бюл. №28, 1999 г.) состоят в повышении безопасности движения автотранспортных средств за счет улучшения устойчивости автотранспортных средств при торможении, в снижении трудоемкости диагностирования в 1,56 раза, регулирования в 3,73 раза, в повышении информативности диагностирования: пропуски отказов снижаются с 42 до 3%, ложная тревога с 16 до 1,7%, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "промышленная применимость".
Изобретения относятся к измерительной технике и могут быть использованы для диагностики аппаратов пневматического тормозного привода тормозов автотранспортных средств, а также для проверки пневмоаппаратов, используемых в других областях техники. При реализации способа к рычагу регулятора тормозных сил (РТС) прикладывают знакопеременное усилие. Рычаг перемещается из одного крайнего положения в другое. Через кран подвода рабочего тела на вход РТС подают давление, на входе и выходе измеряют давление с помощью датчиков, измеряют угол поворота рычага РТС с помощью датчика угла поворота. Измеренные параметры передают в ЭВМ для регистрации положения рычага РТС. Неисправность РТС определяют по зависимости давления на выходе РТС от угла поворота рычага РТС. Устройство содержит измерительные манометры, приемный и накопительный ресиверы, регуляторы давления, соединительные шланги, кран подвода рабочего тела, ЭВМ с блоком АЦП, блок преобразователей, реле времени, датчики входного и выходного давления, тормозную камеру, пневмоклапан. Также оно содержит электромеханическое устройство, которое посредством маятника и штанги соединено с рычагом регулятора тормозных сил. На его оси установлен датчик угла поворота, соединенный с блоком преобразователей. Кроме того, устройство снабжено управляющим устройством, а к нему подсоединены электромеханическое устройство, электромагнитный пневмоклапан, блок АЦП и реле времени. Технический результат заключается в повышении безопасности движения автотранспортных средств в процессе торможения. 2 н.п. ф-лы, 6 ил.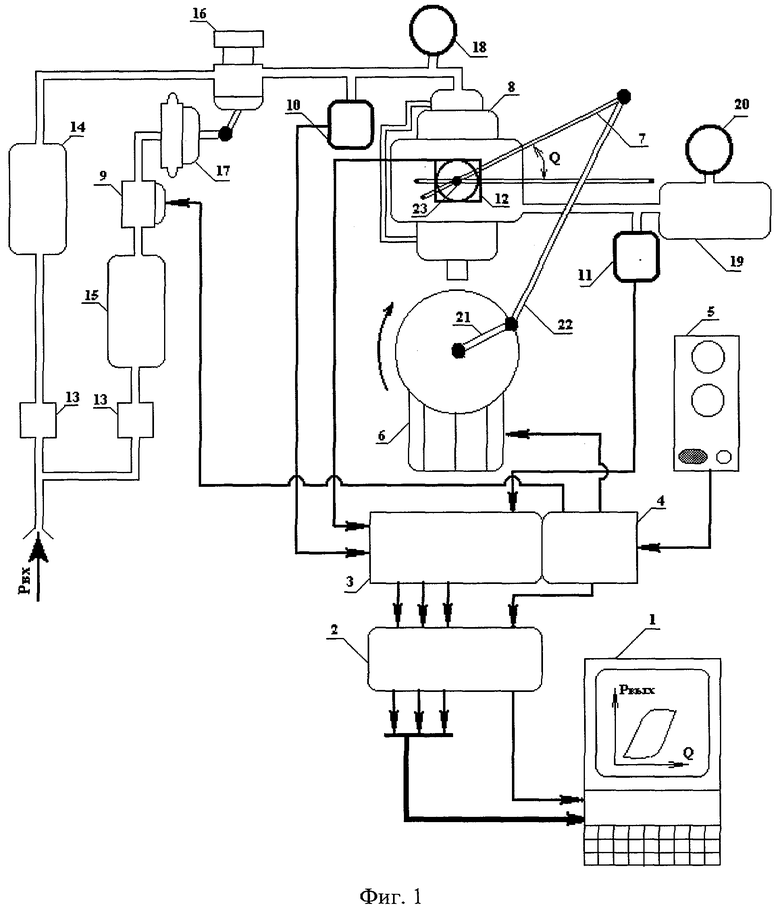
| СПОСОБ ДИАГНОСТИРОВАНИЯ АППАРАТОВ ПНЕВМАТИЧЕСКОГО ТОРМОЗНОГО ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2139506C1 |
| Гуревич Л.В., Мелпамуд Р.А | |||
| Пневматический тормозной привод автотранспортных средств | |||
| - М.: Транспорт, 1988, с.202 | |||
| RU 2003530 С1, 30.11.1993 | |||
| US 3958454 А, 25.05.1976. | |||

