Изобретение относится к области лазерной локации и квантовой электронике и предназначено для использования в стационарных и мобильных наземных комплексах лазерной локации для контроля окружающего пространства, обнаружения и распознавания оптических и оптикоэлектронных средств наблюдения в контролируемой области пространства.
Известна лазерная система обнаружения оптикоэлектронных приборов по патенту Англии [1], содержащая импульсный лазерный генератор с блоком формирования лазерного пучка, фотоприемный блок с приемным объективом, блок памяти, блок управления. К недостаткам данного устройства следует отнести низкую эффективность обнаружения реальных объектов вследствие малой информативности данного устройства, в котором обнаружение наблюдаемого объекта осуществляется по единственному признаку объекта - величине уровня отраженного оптического сигнала в узком спектральном диапазоне подсвечивающего лазерного излучения.
Известно устройство обнаружения оптоэлектронных объектов [2], содержащее лазерный источник излучения, приемный канал, включающий объектив, фотоприемный блок, телевизионную видеокамеру, управляемую диафрагму с приводом, блок автоматической регулировки усиления, блок памяти изображения. К недостаткам устройства следует отнести невысокую эффективность обнаружения объектов, низкую вероятность правильного обнаружения и невозможность распознавания наблюдаемых объектов. Указанные недостатки обусловлены низкой информативностью устройства, в котором обнаружение объектов осуществляется по единственному наблюдаемому признаку - величине отраженного оптического сигнала в узком спектральном диапазоне подсвечивающего лазерного излучения. Известно устройство обнаружения оптических и оптоэлектронных объектов [3], содержащее импульсно-периодический лазер, модулятор лазера, электронно-оптический преобразователь с объективом, фотоприемный блок, видеоконтрольное устройство, блок обработки видеосигналов, синхронизатор, импульсный источник высокого напряжения. Одним из недостатков данного устройства является низкая эффективность автоматического обнаружения оптических средств вследствие низкой информативности устройства, в котором обнаружение объектов осуществляется по интегральной величине отраженного оптического сигнала в узком спектральном диапазоне подсвечивающего лазерного излучения. Другим недостатком устройства является низкая точность привязки обнаруженных оптических средств на местности относительно конкретных предметов на этой местности вследствие низкой эффективности определения и распознавания характерных предметов наблюдаемой местности.
В качестве прототипа выбрано устройство обнаружения оптических и оптоэлектронных средств наблюдения по патенту РФ [4], содержащее два приемных оптических канала видимого диапазона и один передающий канал на основе лазерного генератора видимого диапазона длин волн. Первый приемный канал содержит приемный объектив, отрезающий фильтр, первый фотоприемный блок на основе видеокамеры, блок памяти. Второй приемный канал содержит интерференционный фильтр, второй приемный объектив, электронно-оптический преобразователь, второй фотоприемный блок на основе видеокамеры. Устройство содержит также лазерный генератор с блоком управления, формирователь композитного сигнала, формирователь разностного сигнала, блок задержки, блок затворных импульсов, формирователь кода, блок управления и обработки видеосигналов, блок отображения информации. К недостаткам данного устройства следует отнести низкую эффективность обнаружения объектов вследствие невысокой информативности устройства, в котором обнаружение объектов осуществляется на основе одного единственного определяемого признака - интегральной величины уровня отраженного сигнала в узком спектральном диапазоне подсвечивающего лазерного излучения. Обнаружение объектов осуществляется посредством однократной пороговой обработки интегрального видеосигнала на выходе видеокамеры, работающей в режиме накопления при приеме лазерного отраженного импульсного сигнала. Это снижает эффективность обнаружения короткого по времени импульсного оптического сигнала при его регистрации фотоприемным блоком на основе видеокамеры, предназначенной для приема непрерывных оптических сигналов и работающей в режиме накопления при значительном превышении временем этого накопления длительности импульсного лазерного отраженного сигнала. В результате снижается достоверность получаемой информации и вероятность правильного обнаружения объектов, исключается возможность распознавания обнаруженных объектов и определения их принадлежности к оптикоэлектронным объектам соответствующих классов. Вследствие низкой информативности данное устройство не реализует возможности извлечения из принимаемых оптических сигналов всего объема содержащейся информации, а также не реализует возможности извлечения информации из зарегистрированного распределения интенсивности излучения подстилающей поверхности, на фоне которой осуществляется обнаружение оптикоэлектронных объектов. Другим недостатком данного устройства является низкая точность привязки координат обнаруженного объекта к характерным наблюдаемым элементам подстилающей поверхности вследствие отсутствия инструментального совмещения визирных осей двух используемых приемных каналов.
Целью данного изобретения является устранение и преодоление указанных недостатков, повышение эффективности обнаружения оптических и оптоэлектронных объектов на фоне подстилающей поверхности, подсвеченной естественным фоновым излучением, повышение вероятности распознавания обнаруженных оптоэлектронных объектов и достоверности отнесения их к соответствующему классу известных объектов. В предлагаемой лазерной локационной системе (ЛЛС) решена задача извлечения максимального объема информации из отраженного от обнаруживаемого объекта лазерного подсвечивающего излучения. При этом подсвет объекта осуществляется в двух диапазонах длин волн - в видимом и инфракрасном диапазонах, в которых осуществляется изменение длины волны подсвечивающего лазерного излучения, обеспечиваемого применением лазерных генераторов с перестройкой длины волны излучения и применением специальных спектральных перестраиваемых фильтров в приемных каналах предлагаемой ЛЛС. Повышенная информативность предлагаемой ЛЛС достигается за счет регистрации тонкой временной структуры в отраженных от обнаруживаемого объекта сигналов лазерных излучений в видимом и ИК-диапазонах длин волн. При этом осуществляется спектральный временной анализ структуры отраженных и зарегистрированных сигналов лазерных излучений с помощью процессоров быстрого преобразования Фурье (БПФ). Одновременно с этим в предлагаемой ЛЛС осуществляется регистрация и спектральный анализ распределения интенсивности картины подстилающей поверхности, на фоне которой расположены и наблюдаются различные обнаруживаемые объекты в контролируемой области пространства. Спектральный анализ распределения интенсивности подстилающей поверхности осуществляется в видимом и инфракрасном диапазонах длин волн и позволяет получить дополнительную полезную информацию о месте расположения обнаруживаемых объектов и осуществить привязку координат объектов к характерным элементам контролируемого объема пространства (КОП). Этим обеспечивается более высокая эффективность обнаружения объектов, реализуется повышение вероятности обнаружения и распознавания объектов и повышение достоверности определения принадлежности объектов к соответствующему известному классу объектов. В предлагаемой ЛЛС осуществлено точное совмещение визирных осей действующих приемных и передающих каналов в обеих диапазонах длин волн на основе использования специальных уголковых и зеркального отражателей, чем реально обеспечивается высокая точность привязки обнаруженных оптических средств наблюдения к конкретным предметам и элементам контролируемой местности.
Достигаемым новым техническим результатом является повышение эффективности обнаружения и увеличение вероятности правильного обнаружения и распознавания объектов - оптических и оптикоэлектронных приборов и средств наблюдения, повышение точности определения координат обнаруженных объектов и привязки их координат к конкретным предметам и характерным элементам контролируемой местности.
Указанный технический результат достигается следующим.
1. В лазерной локационной системе, содержащей установленные на первой оптической оси оптически связанные первый приемный объектив, первый фотоприемный блок, выход которого подключен к первому блоку памяти, установленные на второй оптической оси оптически связанные первый формирователь лазерного пучка, первый лазерный генератор с блоком управления, подключенный к блоку управления системой, установленные на третьей оптической оси оптически связанные второй приемный объектив и второй фотоприемный блок, блок отображения информации, подсоединенный к блоку управления системой, введены три фотоприемных блока, два блока памяти, два блока регистрации сигналов, два приемных объектива, шесть управляемых оптических фильтров, пять линз, четыре спектральных перестраиваемых фильтра, блок обработки локационных сигналов, второй лазерный генератор с блоком управления, второй формирователь лазерного пучка, два дефлектора лазерного излучения, два блока быстрого преобразования Фурье (БПФ), четыре уголковых отражателя с блоками перемещения, вогнутое зеркало, отражательное зеркало с блоком перемещения, люминофорный экран, при этом на первой оптической оси последовательно установлены между первым приемным объективом и первым фотоприемным блоком оптически связанные первый спектральный перестраиваемый фильтр, первая линза и первый управляемый оптический фильтр, первый дефлектор лазерного излучения установлен на второй оптической оси между первым формирователем лазерного пучка и первым генератором лазерного излучения, на третьей оптической оси между вторым приемным объективом и вторым фотоприемным блоком последовательно установлены оптически связанные второй спектральный перестраиваемый фильтр, вторая линза и второй управляемый оптический фильтр, выходы второго фотоприемного блока подключены ко входам первого блока регистрации сигналов, на четвертой оптической оси последовательно установлены оптически связанные третий приемный объектив, третий спектральный перестраиваемый фильтр, третья линза, третий управляемый оптический фильтр и третий фотоприемный блок, выход которого подключен к второму блоку памяти, на пятой оптической оси последовательно установлены оптически связанные второй формирователь лазерного пучка, второй дефлектор лазерного излучения и второй лазерный генератор с блоком управления, подключенным к блоку управления системой, на шестой оптической оси последовательно установлены оптически связанные четвертый приемный объектив, четвертый спектральный перестраиваемый фильтр, четвертая линза, четвертый управляемый оптический фильтр и четвертый фотоприемный блок, выходы которого подсоединены ко второму блоку регистрации сигналов, на седьмой оптической оси последовательно установлены оптически связанные отражательное зеркало с блоком перемещения, пятый управляемый оптический фильтр, вогнутое зеркало, люминофорный экран, пятая линза, шестой управляемый оптический фильтр и пятый фотоприемный блок, выход которого подключен к третьему блоку памяти, оптический вход пятого управляемого оптического фильтра посредством отражательного зеркала оптически связан с выходами первого и второго формирователей лазерных пучков, первый уголковый отражатель оптически связывает оптический вход первого приемного объектива с оптическим выходом первого формирователя лазерного пучка, оптический вход второго приемного объектива посредством второго уголкового отражателя оптически связан с выходом первого формирователя лазерного пучка, оптический выход второго формирователя лазерного пучка оптически связан посредством третьего и четвертого уголковых отражателей с оптическими входами третьего и четвертого приемных объективов, входы первого и второго блоков быстрого преобразования Фурье подсоединены соответственно к выходам первого и второго блоков регистрации сигналов, а выходы подключены ко входам блока обработки локационных сигналов, управляющие входы спектральных перестраиваемых фильтров подключены к блоку обработки локационных сигналов, выходы первого, второго и третьего блоков памяти и двух блоков регистрации сигналов подключены ко входам блока обработки локационных сигналов, управляющие входы управляемых оптических фильтров подсоединены к блоку обработки локационных сигналов, выходы которого подключены к блоку управления системой и к блоку отображения информации, управляющие входы блоков перемещения уголковых отражателей и блока перемещения отражательного зеркала подключены к блоку управления системой, блок управления вторым лазерным генератором подсоединен к блоку управления системой, управляющие входы дефлекторов лазерного излучения подключены к блоку управления системой.
2. В лазерной локационной системе по пункту 1 первый и второй лазерные генераторы выполнены на основе лазеров видимого и инфракрасного диапазонов длин волн с возможностью перестройки длин волн генерируемых лазерных излучений.
3. В лазерной локационной системе по пункту 1 первый и пятый фотоприемные блоки выполнены на основе видеокамер видимого диапазона длин волн.
4. В лазерной локационной системе по пункту 1 третий фотоприемный блок выполнен на основе видеокамеры инфракрасного диапазона длин волн.
5. В лазерной локационной системе по пункту 1 второй и четвертый фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
6. В лазерной локационной системе по пункту 1 спектральные перестраиваемые фильтры выполнены на основе акустооптической перестраиваемой ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
7. В лазерной локационной системе по пункту 1 спектральные перестраиваемые фильтры выполнены на основе квантового (лазерного) усилителя - активного квантового фильтра, перестраиваемого по величине длины волны узкополосной фильтрации с помощью магнитного поля.
Сущность изобретения поясняется блок-схемой лазерной локационной системы, приведенной на фигурах 1, 2 и 3.
В блок-схеме ЛЛС, приведенной на фиг.1 цифрами обозначены следующие элементы:
1. Первый приемный объектив.
2. Первый спектральный перестраиваемый фильтр.
3. Первая линза.
4. Первый управляемый оптический фильтр.
5. Первый фотоприемный блок на основе видеокамеры видимого диапазона длин волн.
6. Первый блок памяти.
7. Первый формирователь лазерного пучка.
8. Первый дефлектор лазерного излучения.
9. Первый лазерный генератор видимого диапазона длин волн с блоком управления 10.
11. Второй приемный объектив.
12. Второй спектральный перестраиваемый фильтр.
13. Вторая линза.
14 Второй управляемый оптический фильтр.
15. Второй фотоприемный блок на основе многоэлементной фоточувствительной матрицы видимого диапазона длин волн.
16. Первый блок регистрации сигналов.
17. Первый блок быстрого преобразования Фурье.
18. Третий приемный объектив.
19. Третий спектральный перестраиваемый фильтр.
20. Третья линза.
21. Третий управляемый оптический фильтр.
22. Третий фотоприемный блок на основе видеокамеры инфракрасного диапазона длин волн.
23. Второй блок памяти.
24. Второй формирователь лазерного пучка.
25. Второй дефлектор лазерного излучения.
26. Второй лазерный генератор инфракрасного диапазона длин волн.
27. Блок управления второго лазерного генератора.
28. Четвертый приемный объектив.
29. Четвертый спектральный управляемый фильтр.
30. Четвертая линза.
31. Четвертый управляемый оптический фильтр.
32. Четвертый фотоприемный блок на основе многоэлементной фоточувствительной матрицы инфракрасного диапазона длин волн.
33. Второй блок регистрации сигналов.
34. Второй блок быстрого преобразования Фурье.
35. Первый уголковый отражатель с блоком перемещения 36.
37. Второй уголковый отражатель с блоком перемещения 38.
39, 41. Третий и четвертый уголковые отражатели с блоками перемещения 40, 42.
43. Отражательное зеркало с блоком перемещения 44.
45. Пятый управляемый оптический фильтр.
46. Вогнутое отражательное зеркало.
47. Люминофорный экран.
48. Пятая линза.
49. Шестой управляемый оптический фильтр.
50. Пятый фотоприемный блок на основе видеокамеры.
51. Третий блок памяти.
52. Блок обработки локационных сигналов.
53. Блок управления системой.
54. Блок отображения информации.
55. Обнаруживаемый объект в контролируемой области пространства (КОП).
На фиг.1 нумерация оптических осей осуществляется сверху вниз от первой до седьмой оптической оси.
На фиг.2 приведена часть блок-схемы лазерной локационной системы, в которой представлен вид по стрелке A на фиг.1. Показано взаимное расположение приемных каналов ЛЛС (приемные объективы поз.1, 18, 11, 28) и передающих каналов ЛЛС (формирователи лазерных пучков поз.7 и 24), а также показано расположение уголковых отражателей и отражательного зеркала по отношению к приемным объективам приемных оптических каналов и к выходным элементам первого и второго формирователей лазерных пучков (поз.7 и 24). На фиг.2 показаны также отражательные зеркала поз.56 и 57 устройства сканирования, которые не входят в состав ЛЛС.
На фиг.3 приведена часть блок-схемы ЛЛС, в которой представлен вид по стрелке B на фиг.2. Показано взаимное расположение двух передающих каналов ЛЛС и взаимное расположение двух формирователей лазерных пучков (поз.7 и 24) и отражательного зеркала 43, ответвляющего часть лазерных излучений с выходов указанных формирователей лазерных пучков на оптический вход пятого управляемого оптического фильтра 45 и далее по направлению седьмой оптической оси на оптический вход пятого фотоприемного блока 50.
Принцип действия лазерной локационной системы заключается в следующем. Лазерная локационная система (ЛЛС) содержит четыре приемных канала, расположенных на первой, третьей, четвертой и шестой оптических осях (приемные объективы поз.1, 11, 18, 28), а также содержит два передающих канала, расположенных на второй и пятой оптических осях (формирователи лазерных пучков поз.7 и 24). С помощью двух передающих каналов осуществляется подсвет контролируемой области пространства лазерным излучением видимого диапазона длин волн (лазерный генератор 9) и излучением инфракрасного диапазона длин волн (лазерный генератор 26). Прием отраженного от контролируемой области пространства (КОП) лазерного излучения осуществляется вторым фотоприемным блоком поз.15 в видимом диапазоне длин волн и четвертым фотоприемным блоком поз.32 в инфракрасном диапазоне длин волн. Первый поз.5 и третий поз.22 фотоприемные блоки служат для приема и регистрации распределения интенсивности подстилающей поверхности (картины местности), подсвеченной естественным фоновым излучением (излучением Солнца, дневного или ночного неба и других источников). Элементы ЛЛС, расположенные вдоль седьмой оптической оси поз.43-50, выполняют техническую функцию установления и контроля параллельности в пространстве осей диаграмм направленностей двух указанных передающих каналов. Уголковые отражатели поз.35, 37 осуществляют ответвление части лазерного излучения с выхода первого формирователя лазерного излучения 7 на оптические входы первого и второго приемных каналов - на входы приемных объективов 1 и 11. Соответственно уголковые отражатели поз.39 и 41 осуществляют ответвление части лазерного излучения с выхода второго формирователя лазерного излучения 24 на оптические входы третьего 18 и четвертого 28 приемных объективов. Указанные функции уголковых отражателей осуществляются в режиме функционального контроля для установления и контроля параллельности в пространстве визирных осей приемных каналов и соответствующих им осей диаграмм направленности лазерных излучений передающих каналов. В рабочем режиме ЛЛС нормальное состояние уголковых отражателей 35, 37, 39, 41, а также отражательного зеркала 43 соответствует расположению указанных вспомогательных элементов вне оптической системы ЛЛС. Вывод указанных элементов из оптической системы ЛЛС осуществляется с помощью блоков перемещения поз.36, 38, 40, 42 и 44. На чертежах фиг.1, фиг.2 и фиг.3 показано положение уголковых отражателей и отражательного зеркала 43, соответствующее их положению при выполнении операций настройки и функционального контроля в ЛЛС.
Основную функцию приема и регистрации лазерного излучения, отраженного от обнаруживаемых объектов в КОП, осуществляют второй фотоприемный блок 15 в видимом диапазоне длин волн и четвертый фотоприемный блок 32 в ИК-диапазоне длин волн. Указанные фотоприемные блоки выполнены на основе многоэлементных фоточувствительных диодных матриц видимого диапазона длин волн (поз.15) и инфракрасного диапазона длин волн (поз.32). Возможно также использование высокочувствительных матричных ФЭУ видимого диапазона длин волн. Данные фотоприемные блоки являются светочувствительными фотоприемниками - регистраторами импульсных оптических сигналов в видимом и ближнем ИК-диапазонах длин волн и осуществляют регистрацию тонкой временной структуры отраженного от обнаруживаемого объекта подсвечивающего лазерного излучения. Число независимых элементов приема оптических сигналов в указанных матричных фотоприемниках (число фотодиодов) соответствует числу элементов разрешения в оптической системе соответствующего приемного объектива 11 или 28. Форма и объем контролируемого объема пространства (КОП) определяется полем зрения приемных (входных) объективов 1, 11 и 18, 28. Конструкция указанных объективов предполагает одинаковое поле зрения с целью последующего формирования суммарного изображения наблюдаемой местности в различных спектральных диапазонах и обнаруженных на фоне местности объектов. Зарегистрированные сигналы в электрической форме с выходов фотоприемных блоков 15, 32 поступают параллельно на входы блоков регистрации сигналов 16 и 33, где осуществляется оцифровка, предварительная пороговая обработка и буферное запоминание принятых оптических сигналов в форме соответствующих цифровых массивов информации. Предварительная пороговая обработка заключается в том, что оцифровке подвергается электрический сигнал, уровень которого превысил некоторый установленный порог. Одновременно в блоках регистрации сигналов 16 и 33 осуществляется фиксация и определение момента времени появления импульсного сигнала на соответствующих выходах матричных фотоприемных блоков 15 и 32 относительно моментов времени излучения соответствующего зондирующего лазерного импульса в лазерном генераторе 9 и в лазерном генераторе 26. В блоки регистрации сигналов 16 и 33 от блока обработки локационных сигналов 52 поступают в цифровой форме сигналы точного времени, отображающие внутреннее время ЛЛС. В блоках регистрации 16 и 33 осуществляется привязка моментов времени поступления с выходов фотоприемных блоков 15 и 32 электрических импульсных сигналов к указанным сигналам внутреннего точного времени, а информация об этом поступает от блоков регистрации в блок обработки локационных сигналов 52, в котором и осуществляется сравнение моментов времени прихода импульсных сигналов с моментами времени излучения лазерных импульсов лазерными генераторами также в системе точного времени ЛЛС, в результате чего определяется задержка принятых сигналов относительно излученных сигналов и определяется на основании этого дальность до соответствующего обнаруженного объекта. Информация о моменте времени излучения лазерных импульсов поступает в блок 52 из блока 53, в котором формируется управляющий сигнал, поступающий в блоки управления лазерными генераторами 10 и 27 для запуска генерации лазерного излучения. Далее зарегистрированные цифровые сигналы через соответствующие интерфейсы поступают в блок обработки локационных сигналов 52. Одновременно зарегистрированные сигналы с выходов блоков регистрации 16 и 33 поступают на входы первого и второго блоков быстрого преобразования Фурье поз.17 и 34. Каждый блок быстрого преобразования Фурье (БПФ) представляет собой специализированный процессор, осуществляющий спектральный анализ поступающих сигналов путем формирования одномерного Фурье-преобразования этих сигналов в цифровой форме. Результаты спектрального анализа принятых оптических сигналов в цифровой форме с выходов блоков БПФ 17 и 34 поступают в блок обработки локационных сигналов 52 вместе с соответствующими реализациями оптических сигналов в цифровой форме, поступившими ранее. Таким образом, в блок обработки локационных сигналов 52 поступают реализации оптических сигналов, отраженных от обнаруживаемого объекта, и одновременно реализации одномерных Фурье-спектров этих сигналов, полученных в результате выполнения преобразования Фурье над каждым из принятых оптических сигналов в блоках БПФ 17 и 34. Преобразования Фурье выполняются в блоках БПФ в реальном масштабе времени или с некоторым сдвигом по времени в зависимости от производительности используемых процессоров в блоках БПФ 17 и 34. В блоке обработки локационных сигналов 52 осуществляется сравнение полученных спектров оптических сигналов с хранящимися в ячейках памяти блока 52 эталонными спектрами оптических сигналов стандартных объектов. На основании этого сравнения осуществляется обнаружение и распознавание наблюдаемых объектов и выносится решение о принадлежности наблюдаемого и обнаруженного объекта к некоторому классу известных объектов, например, биноклей, приемных объективов наблюдательных и оптикоэлектронных приборов и т.п. По поступившим реализациям собственно оптических сигналов в результате специальной их обработки также получают ряд важных сведений о характере обнаруживаемых объектов и их отражательных спектральных характеристиках в соответствующих спектральных диапазонах длин волн. При этом осуществляется предварительное обнаружение объекта на основании сравнения уровня принятого оптического сигнала в цифровой форме с некоторым установленным пороговым уровнем. Осуществляется измерение дальности до предварительно обнаруженного объекта по моменту времени прихода и регистрации оптического сигнала в фотоприемном блоке 15 и 32 относительно момента времени излучения соответствующего лазерного импульса в лазерном генераторе 9 и 26. Окончательное обнаружение объекта осуществляется в результате сравнения (анализа) спектра соответствующего импульсного оптического сигнала от предварительно обнаруженного объекта с библиотекой эталонных спектров, хранящихся в специальных ячейках памяти блока обработки локационных сигналов. Результаты обнаружения и распознавания обнаруженного объекта отображаются на экране блока отображения информации 54. Прием и регистрация оптических сигналов, отраженных от обнаруживаемого объекта, вторым и четвертым (поз.15, 32) фотоприемными блоками осуществляется в узком спектральном диапазоне длин волн, соответствующем длине волны подсвечивающего лазерного излучения, генерируемого лазерными генераторами 9 и 26. Узкополосную спектральную фильтрацию принимаемого отраженного от КОП лазерного излучения (оптических сигналов) осуществляют спектральные перестраиваемые фильтры поз.12 в видимом диапазоне длин волн и фильтр поз.29 в инфракрасном диапазоне длин волн. Управление длиной волны и полосой фильтрации в спектральных перестраиваемых фильтрах осуществляется по управляющим сигналам, поступающим на указанные фильтры от блока обработки локационных сигналов 52 в цифровой форме. Одновременно блок обработки локационных сигналов управляет всеми элементами (блоками) приемных каналов, в частности, управляет величиной пропускания управляемых оптических фильтров поз.14 и 31 во втором и четвертом приемных каналах. Указанные фильтры служат для защиты фотоприемных блоков от чрезмерной интенсивности принимаемых отраженных сигналов лазерного излучения, например, при обнаружении близко расположенных объектов или при работе ЛЛС в контрольном режиме при настройке эксплуатационных параметров системы. При работе ЛЛС в штатном режиме обнаружения и распознавания обнаруженных и наблюдаемых объектов осуществляется регистрация и анализ отражательных характеристик объектов в широком диапазоне изменения длин волн подсвечивающего лазерного излучения в видимом диапазоне длин волн и в инфракрасном диапазоне длин волн. Изменение длины волны подсвечивающего лазерного излучения в видимом диапазоне длин волн осуществляется с помощью изменения длины волны генерации в лазерном генераторе 9 видимого диапазона по управляющим сигналам от блока управления этим лазерным генератором 10, который в свою очередь управляется сигналами от блока управления системой 53. Одновременно осуществляется перестройка длины волны фильтрации принимаемых оптических сигналов в спектральном перестраиваемом фильтре 12 видимого диапазона длин волн, в котором длина волны спектральной фильтрации устанавливается равной длине волны генерации лазерного генератора 9. Изменение длины волны подсвечивающего лазерного излучения в инфракрасном диапазон длин волн осуществляется путем изменения длины волны генерации в лазерном генераторе 26 ИК-диапазона по управляющим сигналам от блока управления этим лазерным генератором 27 и, соответственно, по сигналам от блока управления системой 53. При этом осуществляется соответствующая перестройка длины волны полосы фильтрации оптических сигналов в спектральном перестраиваемом фильтре 29 инфракрасного диапазона длин волн, при которой длина волны спектральной фильтрации устанавливается равной длине волны генерации лазерного излучения в лазерном генераторе 26 ИК-диапазона. Для осуществления многоспектрального подсвета КОП используются лазерные генераторы 9 и 26 с перестройкой длины волны генерируемого лазерного излучения в видимом и инфракрасном диапазонах длин волн. В результате в блоке обработки локационных сигналов 52 накапливается информация о параметрах отраженных оптических сигналов, отражательных характеристиках обнаруживаемых объектов в широком спектральном диапазоне подсвечивающего лазерного излучения в видимой и инфракрасной областях оптического спектра. При этом одновременно образуется информация о параметрах тонкой временной структуры отраженных сигналов и параметрах Фурье-спектра полученной тонкой временной структуры для соответствующих длин волн подсвечивающего и отраженного лазерного излучения в видимом и инфракрасном диапазонах длин волн. Полученный увеличенный объем (массив) информации о характеристиках обнаруживаемого объекта позволяет существенно повысить эффективность обнаружения и вероятность распознавания объектов различной технической природы.
Одновременно с получением информации об отражательных характеристиках обнаруживаемых объектов, находящихся в КОП, в предлагаемой лазерной локационной системе осуществляется прием и регистрация излучения подстилающей поверхности (картины местности), подсвеченной естественным излучением Солнца, излучением небесной сферы и любых других источников естественного, а также стороннего искусственного излучения. Прием и регистрация указанных фоновых естественных излучений от КОП осуществляется с помощью первого приемного канала и первого фотоприемного блока 5 в видимом диапазоне длин волн и с помощью третьего приемного канала и третьего фотоприемного блока 22 в инфракрасном диапазоне длин волн. В качестве фотоприемных блоков 5 и 22 используются видеокамера видимого диапазона длин волн (поз.5) и видеокамера инфракрасного диапазона длин волн (поз.22). Прием и регистрация фонового излучения в видимом диапазоне длин волн с помощью первого приемного канала в первом фотоприемном блоке 5 осуществляется следующим образом. Отраженное от подстилающей поверхности фоновое излучение улавливается первым приемным объективом 1. Далее приемный объектив 1 совместно с первой линзой 3 формируют на фоточувствительной площадке фотоприемного блока 5 (видеокамеры видимого диапазона) изображение объекта и контролируемого объема пространства, в котором находится указанный обнаруживаемый объект. При этом КОП и обнаруживаемый объект подсвечены естественным фоновым излучением, например солнечным излучением, а подсвета КОП и объекта зондирующим лазерным излучением от лазерных генераторов 9 и 26 не производится. Принимаемое фоновое излучение на пути от первого приемного объектива 1 к фотоприемному блоку 5 проходит через спектральный перестраиваемый фильтр 2, рабочий элемент которого представляет собой специальный кристалл, прозрачный к излучению видимого диапазона длин волн, в котором возбуждены ультразвуковые волны. В результате взаимодействия проходящего оптического сигнала (излучения) с ультразвуковыми волнами в указанном кристалле осуществляется динамическая фильтрация оптического сигнала, при которой часть оптического спектра проходящего излучения подавляется, не проходит к линзе 3 и не попадает на оптический вход фотоприемного блока 5 - на фоточувствительную площадку видеокамеры 5. Длина волны динамической спектральной фильтрации определяется управляющими сигналами, поступающими на управляющий вход спектрального перестраиваемого фильтра 2 с выхода блока обработки локационных сигналов 52, в котором осуществляется управление работой спектральных перестраиваемых фильтров и вырабатываются соответствующие управляющие сигналы, определяющие длину волны пропускания фильтра, а также ширину полосы фильтрации проходящих оптических сигналов. Таким образом, спектральный перестраиваемый фильтр 2 работает в режиме управляемой спектральной фильтрации проходящего оптического сигнала и выполняет функцию оптического спектроанализатора изображения местности (подстилающей поверхности), сформированной приемным объективом 1 и линзой 3 на фоточувствительной площадке первого фотоприемного блока 5. Следует отметить, что спектральные перестраиваемые фильтры выполняют еще одну важную функцию: обеспечивают режим стробирования принимаемых сигналов лазерного излучения по дальности вследствие того, что пропускание принимаемых оптических сигналов через перестраиваемый спектральный фильтр осуществляется только в моменты времени подачи управляющего электрического сигнала на этот фильтр. Режим стробирования по дальности реализуется при осуществлении управления временем пропускания и фильтрацией оптических сигналов в спектральном перестраиваемом фильтре с помощью импульсного электрического сигнала с заданной длительностью. Указанное выше изображение подстилающей поверхности в некотором заданном узком спектральном диапазоне, обусловленном фильтрацией в спектральном перестраиваемом фильтре 2, регистрируется первым фотоприемным блоком 5, преобразуется в видеосигнал и поступает с выхода блока 5 в первый блок памяти 6, где оцифровывается и в цифровой форме запоминается. Далее рассмотренная процедура регистрации изображения наблюдаемой местности в некотором заданном спектральном диапазоне повторяется возможно несколько раз при других измененных параметрах длины волны полосы фильтрации проходящего оптического излучения в спектральном перестраиваемом фильтре 2. Изменение длины волны полосы фильтрации фильтра 2 осуществляется под управлением сигналов, поступающих на управляющий вход фильтра 2 с выхода блока обработки локационных сигналов 52. В результате в блоке памяти 6 накапливаются несколько изображений местности (подстилающей поверхности), полученных на различных длинах волн оптического спектра в видимом диапазоне длин волн, например, в красном, зеленом и синем диапазонах видимого спектра длин волн. Полученная информация о многоспектральном анализе изображений местности поступает с выхода блока памяти 6 в блок обработки локационных сигналов 52 для дальнейшего использования в обнаружении и распознавании объектов, находящихся в КОП совместно с поступившими ранее результатами приема и регистрации отраженного от КОП зондирующего лазерного излучения в видимом и ИК-диапазонах от лазерных генераторов 9 и 26. Аналогичным образом прием и регистрация фонового излучения от изображения местности в КОП в инфракрасном диапазоне длин волн осуществляется в третьем приемном канале с помощью третьего фотоприемного блока 22, в котором используется видеокамера инфракрасного диапазона длин волн. Объектив 18 совместно с линзой 20 формируют на входе фотоприемного блока 22 изображение местности с возможно находящимся обнаруживаемым объектом в инфракрасном диапазоне длин волн. Спектральный перестраиваемый фильтр 19 работает в режиме управляемой фильтрации проходящего оптического излучения в инфракрасном диапазоне и выполняет функцию оптического спектроанализатора инфракрасного диапазона длин волн. Управление установлением длины волны полосы фильтрации фильтра 22 в ИК-диапазоне и изменением этой длины волны осуществляется под воздействием управляющих сигналов, поступающих на управляющий вход спектрального перестраиваемого фильтра 22 с одного из выходов блока обработки локационных сигналов 52. Зарегистрированное изображение местности с выхода фотоприемного блока 22 поступает в блок памяти 23, где оцифровывается и запоминается. С помощью фотоприемного блока 22 регистрируется несколько изображений местности для нескольких длин волн полосы фильтрации в инфракрасном диапазоне длин волн. Полученные изображения местности в нескольких заданных установленных длинах волн фильтрации в ИК-диапазоне запоминаются в блоке памяти 23 и далее поступают в блок обработки локационных сигналов 52 для дальнейшей обработки и анализа совместно с ранее полученной информацией.
В результате совместной работы всех четырех приемных каналов, а также работы передающих каналов в ЛЛС в блоке обработки локационных сигналов 52 образуется и накапливается информация о параметрах отражательных характеристик отдельных объектов в КОП, полученных при регистрации импульсов отраженного лазерного излучения в нескольких различных длинах волн подсвечивающего лазерного излучения в видимом и инфракрасном диапазонах длин волн. Одновременно в блоке 52 образуется и накапливается информация о спектральном распределении изображения местности (подстилающей поверхности) в КОП в видимом и инфракрасном диапазонах длин волн. При этом спектральное распределение изображения местности сформировано в некоторых заданных дискретных значениях длин волн в форме цифровых массивов реализации изображений местности, полученных и зарегистрированных на фиксированных величинах длин волн видимого и инфракрасного диапазонов. При этом полученные изображения местности в различных диапазонах длин волн и объекты, обнаруженные и зарегистрированные в результате приема импульсов отраженного от КОП лазерного излучения во втором 15 и четвертом 32 фотоприемных блоках, имеют единую точную привязку к общей системе пространственных координат, что обеспечивается установлением и контролем взаимной параллельности в пространстве визирных осей всех четырех приемных каналов, а также двух передающих каналов. Установление параллельности визирных осей рассмотрено ниже. Полученная в результате работы ЛЛС информация используется для постоянного наблюдения (мониторинга) контролируемой области пространства, для обнаружения находящихся в КОП объектов с различными параметрами отражательных характеристик в видимом и инфракрасном диапазонах длин волн, а также для распознавания обнаруженных объектов и определения их принадлежности к соответствующим классам и типам объектов, например, принадлежности к оптическим и оптикоэлектронным наблюдательным приборам и т.п. При этом для распознавания типов обнаруженных объектов используется анализ тонкой временной структуры отраженных от этих объектов импульсов подсвечивающего лазерного излучения видимого и инфракрасного диапазонов длин волн. Анализ импульсов указанного лазерного излучения осуществляется путем формирования одномерных Фурье-спектров с помощью процессоров быстрого преобразования Фурье и сравнения полученных спектров с библиотекой эталонных спектров стандартных объектов, хранящихся в специальных регистрах памяти блока обработки локационных сигналов 52. Таким образом, для обнаружения объектов, находящихся в КОП, и для распознавания обнаруженных объектов используется большой массив информации, полученной на основании подсвета КОП зондирующим лазерным излучением в нескольких участках видимого и инфракрасного диапазонов, а также информации, полученной в результате пассивного приема и регистрации изображения наблюдаемой местности (подстилающей поверхности) в КОП, подсвеченной естественными источниками излучения, и осуществления спектрального анализа изображения местности в видимом и инфракрасном диапазонах длин волн. Применение указанных технических средств позволяет существенно повысить информативность ЛЛС, увеличить эффективность обнаружения и вероятность правильного распознавания объектов в КОП.
На основании использования входящих в ЛЛС технических средств собственно лазерной локации КОП и средств пассивного приема, регистрации и спектрального анализа изображений наблюдаемой местности - подстилающей поверхности - можно осуществлять различные алгоритмы обнаружения и распознавания объектов, находящихся или замаскированных в КОП. Использование спектрального анализа изображения наблюдаемой местности в КОП позволяет эффективно выделять отдельные характерные точки и элементы местности, в которых расположены, например, зеленые насаждения, искусственные сооружения, в которых могут быть расположены наблюдательные оптикоэлектронные и оптические приборы, а также различные камуфляжные средства. Указанные элементы имеют различающиеся спектральные характеристики в видимом и ИК-диапазонах и эффективно определяются с помощью спектрального анализа регистрируемого изображения местности. В моменты времени приема и регистрации изображения местности с помощью первого и третьего фотоприемных блоков облучение КОП зондирующим лазерным излучением не производится. При облучении КОП зондирующим лазерным излучением от лазерных генераторов 9 и 26 основной прием отраженного лазерного излучения осуществляется во втором и четвертом приемных каналах с помощью фотоприемных блоков 15 и 32. При этом возможно также осуществлять прием и регистрацию отраженного лазерного излучения и в фотоприемных блоках 5 и 22, соответственно в видимом и ИК диапазонах при наличии достаточного уровня принимаемого отраженного сигнала для некоторых типов объектов, например, катафотов, уголковых отражателей, оптических приборов, не снабженных антибликовыми покрытиями. Для осуществления приема импульсных узкополосных лазерных отраженных сигналов в указанных первом 5 и третьем 22 фотоприемных блоках спектральные перестраиваемые фильтры 2 и 19 настраиваются на выполнение фильтрации длин волн, равных длинам волн генерации соответствующих лазерных генераторов видимого диапазона 9 для спектрального фильтра 2 и инфракрасного диапазона длин волн - лазерный генератор 26 - для спектрального перестраиваемого фильтра 19 ИК-диапазона длин волн. При этом для обнаружения наличия объектов в изображениях, зарегистрированных фотоприемными блоками 5 и 22, при осуществлении подсвета КОП зондирующим лазерным излучением нет необходимости формировать специальный разностный видеосигнал, как это сделано в устройстве-прототипе, так как в предлагаемой лазерной локационной системе обработка изображений, зарегистрированных фотоприемными блоками 5 и 22, осуществляется в цифровой форме в блоке обработки локационных сигналов 52, и для обнаружения объектов достаточно сравнить уровни зарегистрированных интенсивностей сигналов изображения в каждом элементе разрешения (пикселе) при наличии подсвета КОП зондирующим лазерным излучением и при пассивном приеме и регистрации изображения местности, подсвеченной естественным фоновым излучением. Следует отметить, что фотоприемные блоки 15 и 32, регистрирующие импульсные оптические сигналы отраженного зондирующего лазерного излучения, обладают более высокой чувствительностью при приеме коротких импульсных оптических сигналов и позволяют зарегистрировать тонкую временную структуру отраженного лазерного излучения, что позволяет повысить эффективность обнаружения и вероятность распознавания объектов в ЛЛС. Регистрация отраженного импульсного оптического сигнала фотоприемными блоками 5 и 22 позволяет получить информацию о расположении обнаруживаемого объекта относительно характерных элементов местности, выявленных фотоприемными блоками 5 и 22, осуществлявшими спектральный анализ изображений местности, подсвеченной естественным фоновым излучением. Это позволяет осуществить прямую привязку координат объектов, обнаруживаемых с помощью фотоприемных блоков 15 и 32, к многоспектральным изображениям местности, формируемым с помощью фотоприемных блоков 5 и 22. При отсутствии возможности зарегистрировать в фотоприемных блоках 5 или 22 импульсный оптический сигнал отраженного зондирующего лазерного излучения вследствие, например, весьма малого уровня отраженного оптического сигнала обнаружение объекта осуществляется с помощью фотоприемных блоков 15 и 33, непосредственно приспособленных для приема импульсного лазерного излучения соответствующего диапазона длин волн, а привязку координат обнаруженных объектов осуществляют на основе установления и контроля строгой параллельности визирных осей всех четырех приемных каналов в ЛЛС. Таким образом, прием и регистрация отраженного от КОП зондирующего лазерного излучения позволяет получить дополнительную информацию о характеристиках обнаруживаемых объектов и повысить эффективность обнаружения и распознавания объектов в предлагаемой ЛЛС. Следует отметить, что возможности предлагаемой ЛЛС по получению информации о многоспектральных изображениях наблюдаемой местности и одновременного определения отражательных характеристик соответствующих выделенных элементов и обнаруженных объектов на фоне изображений местности позволяет использовать предлагаемую ЛЛС для непрерывного круглосуточного наблюдения и мониторинга контролируемой области пространства и оперативного обнаружения и распознавания появляющихся новых элементов и оптикоэлектронных и оптических средств наблюдения и разведки в контролируемой области.
Рассмотрим далее режим функционального контроля и настройки аппаратуры предлагаемой ЛЛС. В данном режиме работы ЛЛС осуществляется установление и контроль параллельности в пространстве визирных осей всех четырех приемных оптических каналов, а также параллельность осей диаграмм направленности передающих каналов видимого и инфракрасного излучения. Для эффективной работы предлагаемой ЛЛС необходима строгая параллельность в пространстве визирных осей и диаграмм направленности лазерного излучения всех шести приемных и передающих каналов, составляющих ЛЛС. В предлагаемой ЛЛС в режиме функционального контроля и настройки установление в пространстве параллельности визирных осей приемных каналов и диаграмм направленности передающих каналов осуществляется в два этапа. Вначале на первом этапе устанавливается взаимная параллельность в пространстве осей диаграмм направленности двух передающих каналов, работающих в видимом диапазоне (первый передающий канал с лазерным генератором 9) и в инфракрасном диапазоне длин волн (второй передающий канал с лазерным генератором 26). На втором этапе настройки осуществляется установление параллельности визирных осей первого и второго приемных каналов видимого диапазона длин волн относительно направления оси диаграммы направленности первого передающего канала видимого диапазона, а также установление параллельности визирных осей третьего и четвертого приемных каналов инфракрасного диапазона длин волн относительно направления оси диаграммы направленности второго передающего канала ИК-диапазона. В результате этих процедур визирные оси всех приемных каналов и оси диаграмм направленности передающих каналов оказываются взаимно параллельными в пространстве. Процесс настройки параллельности указанных осей приемных и передающих каналов представлен с помощью схем расположения элементов ЛЛС на фиг.2 и фиг.3. На фиг.2 представлено взаимное расположение в пространстве всех шести каналов, составляющих ЛЛС, - двух передающих и четырех приемных каналов. Здесь показан вид с торца ЛЛС, а именно: вид на расположение элементов ЛЛС по стрелке A на фиг.1. Позициями 1 и 11 на фиг.2 обозначены приемные апертуры первого поз.1 и второго поз.11 приемных объективов приемных каналов видимого диапазона длин волн. Позицией 7 обозначена выходная апертура первого передающего канала видимого диапазона (оптический выход первого формирователя лазерного пучка). Таким образом, два приемных канала и один передающий канал видимого диапазона расположены в одной плоскости, перпендикулярной плоскости чертежа фиг.2. Позициями 18 и 28 на фиг.2 обозначены приемные апертуры третьего поз.18 и четвертого поз.28 приемных объективов приемных каналов инфракрасного диапазона длин волн. Позицией 24 на фиг.2 обозначена выходная апертура второго передающего канала инфракрасного диапазона длин волн (оптический выход второго формирователя лазерного пучка). Два приемных канала и соответствующий передающий канал ИК-диапазона расположены в одной плоскости, расположенной рядом и параллельно плоскости расположения приемных и передающего каналов видимого диапазона длин волн. На фиг.2 представлены также элементы (поз.43-50), расположенные на седьмой оси чертежа на фиг.1, выполняющие функцию контроля параллельности диаграмм направленностей двух передающих каналов в ЛЛС. На фиг.3 представлена схема расположения в пространстве двух передающих каналов вид по стрелке B на фиг.2. При этом остальные приемные каналы, присутствующие на фиг.2, на фиг.3 не показаны, так как их расположение не влияет на расположение элементов на схеме фиг.3. Здесь представлены также элементы поз.43-50, выполняющие указанную выше функцию контроля параллельности осей диаграмм направленности двух передающих каналов ЛЛС. На первом этапе, как было отмечено, осуществляется установление параллельности передающих каналов предлагаемой ЛЛС. Этот процесс иллюстрируется блок-схемами на фиг.2 и фиг.3. Установление параллельности диаграмм направленности передающих каналов осуществляется с помощью элементов, расположенных на седьмой оптической оси ЛЛС фиг.1 и фиг.2, 3, следующим образом. Отражательное зеркало поз.43 с помощью блока перемещения 44 устанавливается на выходе первого и второго поз.7 и 24 формирователей лазерных пучков в положение, показанное на схеме фиг.3, а также условно показанное на схеме фиг.2. При этом положении отражательное зеркало 43 перекрывает одновременно часть выходного лазерного излучения с оптических выходов первого 7 и второго 24 формирователей лазерных пучков и направляет эти два пучка лазерных излучений (два плоских волновых фронта) на оптический вход пятого управляемого оптического фильтра 45, а затем через него направляет пучки лазерных излучений на вогнутое отражательное зеркало 46. Последнее фокусирует указанные пучки лазерного излучения в плоскости люминофорной пластины 47. (см. фиг.3 и фиг.2 одновременно). При установлении и контроле направлений диаграмм направленности лазерные генераторы работают по отдельности и попеременно. Вначале контролируется и устанавливается направление оси при работе лазерного генератора 9 видимого диапазона при неработающем лазерном генераторе ИК-диапазона 26. Затем при работающем лазерном генераторе ИК-диапазона устанавливается направление его оси диаграммы направленности, соответствующей направлению ранее установленного направления оси лазерного генератора 9 при отсутствии генерации излучения этого лазерного генератора. Люминофорная пластина выполняет две функции: функции отражательного экрана для излучения видимого диапазона длин волн и функции визуализирующего собственно люминофорного экрана для излучения инфракрасного диапазона длин волн. Вначале с помощью люминофорной пластины 47 осуществляется определение положения в пространстве оси диаграммы направленности лазерного излучения на выходе формирователя пучка 7 при работе лазерного генератора видимого диапазона длин волн 9 и при выключенном лазерном генераторе 26. Люминофорная пластина выполняет в этом случае функции отражательного экрана для излучения видимого диапазона длин волн. Положение точки сфокусированного лазерного пучка в плоскости люминофорной пластины 47 характеризует направление в пространстве оси диаграммы направленности лазерного пучка, сформированного на выходе формирователя лазерного пучка поз.7 при работе лазерного генератора 9 видимого диапазона длин волн. Это положение сфокусированной яркой светящейся точки регистрируется пятым фотоприемным блоком 50, в качестве которого использована видеокамера видимого диапазона длин волн. Зарегистрированное изображение плоскости люминофорной пластины с выхода пятого фотоприемного блока 50 поступает в блок памяти 51, а с его выхода поступает в блок обработки локационных сигналов 52. Линза 48 осуществляет перенос изображения люминофорной пластины 47 в плоскость фоточувствительной площадки фотоприемного блока 50. В результате в блоке обработки локационных сигналов 52 фиксируется информация о координатах сфокусированной точки в плоскости люминофорного экрана 47, которые отображают два плоских угла направления в пространстве оси диаграммы направленности сформированного лазерного пучка относительно центральной осевой линии - второй оптической оси на оптическом выходе формирователя лазерного пучка поз.7. С помощью дефлектора лазерного излучения 8 осуществляют небольшую подстройку направления распространения лазерного пучка на выходе формирователя лазерного пучка 7 и устанавливают такое направление волнового фронта и оси диаграммы направленности излучения на выходе формирователя лазерного пучка 7, при котором сфокусированная точка излучения попадает точно в центр люминофорного экрана 47 и, соответственно, в центр фоточувствительной площадки фотоприемного блока 50. Это соответствует направлению в пространстве оси диаграммы направленности лазерного излучения на оптическом выходе формирователя лазерного пучка 7 строго по направлению второй оптической оси лазерной локационной системы. Координаты этой светящейся сфокусированной точки определяются и запоминаются в блоке обработки локационных сигналов 52. Далее лазерный генератор 9 выключается и включается лазерный генератор 26 инфракрасного диапазона длин волн. Ход лазерного излучения с выхода формирователя лазерного пучка 24 до люминофорного экрана 47 аналогичен рассмотренному распространению лазерного излучения с выхода формирователя лазерного пучка 7 видимого диапазона. Люминофорный экран 47 выполняет функцию визуализатора инфракрасного излучения, генерируемого лазерным генератором 26. Под воздействием интенсивного излучения от лазерного генератора 26, сфокусированного в плоскость люминофорного экрана 47, последний переходит в возбужденное состояние и излучает люминесцентное излучение в видимом диапазоне с распределением в плоскости экрана 47, соответствующим распределению инфракрасного излучения, поступающего на люминесцентный экран 47 в результате его фокусировки вогнутым отражательным зеркалом 46. Характер фокусировки видимого и инфракрасного излучений вследствие использования отражательного металлического вогнутого зеркала идентичен. Фотоприемный блок 50 регистрирует распределение излучения в плоскости люминесцентного экрана 47 в видимом преобразованном диапазоне длин волн. В результате в блоке обработки локационных сигналов 52 образуются координаты светящейся сфокусированной точки излучения в плоскости люминофорного экрана, соответствующие направлению в пространстве диаграммы направленности пучка инфракрасного лазерного излучения на выходе формирователя лазерного пучка 24. С помощью двухкоординатного дефлектора лазерного излучения осуществляется подстройка направления оси диаграммы направленности данного пучка излучения до установления его параллельности с диаграммой направленности лазерного излучения на выходе формирователя лазерного пучка 7. Для установления указанной параллельности светящаяся точка от инфракрасного лазерного пучка так же, как и от пучка излучения видимого диапазона, устанавливается в центре люминофорного экрана 47 на его пересечении с седьмой оптической осью лазерной локационной системы. Управление отклонением лазерного пучка ИК-излучения и, соответственно, управление смещением светящейся точки от ИК лазерного пучка в плоскости люминофорного экрана 47 осуществляется в блоке обработки локационных сигналов 52, в который поступает информация о координатах указанной светящейся точки в форме видеоизображения (видеосигнала), формируемого пятым фотоприемным блоком 50. Информация о необходимой величине дополнительного отклонения инфракрасного лазерного пучка, вырабатываемая в блоке обработки локационных сигналов 52, поступает из блока 52 в блок управления системой 53, от которого управляющий сигнал поступает на управляющий вход соответствующего дефлектора лазерного излучения 25, осуществляющего отклонение лазерного излучения, генерируемого лазерным генератором 26 инфракрасного диапазона. Таким образом, в результате указанных действий светящиеся точки от лазерных излучений видимого и инфракрасного диапазонов устанавливаются в одном месте в центре люминофорного экрана 47, а диаграммы направленности лазерных излучений, формируемых лазерными генераторами 9 и 26 на выходе формирователей лазерных пучков 7, 24, устанавливаются параллельными в пространстве. Управляемые оптические фильтры служат для ослабления уровней излучений, поступающих на люминофорную пластину 47 и на оптический вход пятого фотоприемного блока 50. После установления параллельности указанных диаграмм направленности с помощью блока перемещения 44 отражательное зеркало 43 выводится из оптической системы и не препятствует прохождению лазерных пучков на выходах формирователей лазерных пучков 7 и 24. Далее осуществляется установление и контроль параллельности в пространстве визирных осей всех четырех приемных каналов видимого и инфракрасного диапазонов. Для выполнения данных действий в оптические системы четырех приемных каналов вводятся уголковые отражатели поз.35, 37, 39 и 41 с помощью соответствующих блоков перемещения 36, 38, 40, 42, как это показано на фиг.1 и фиг.2. Уголковые отражатели осуществляют ответвление части лазерного пучка (плоского волнового фронта) на выходе формирователей лазерного пучка 7 и 24 на оптические входы соответствующих приемных каналов - на входы приемных объективов 1, 11 и на входы объективов 18, 28. При этом уголковые отражатели отражают лазерные пучки строго в обратном направлении, вследствие чего направление лазерных пучков, поступающих на оптические входы указанных приемных объективов, оказываются параллельными оси диаграммы направленности соответствующих лазерных пучков на выходах формирователей лазерных пучков 7 и 24. Далее лазерные излучения после приемных объективов проходят через спектральные перестраиваемые фильтры 2, 12 и 19, 29 и соответствующими линзами поз.3, 12 и 20, 30 фокусируются на фоточувствительных площадках фотоприемных блоков 5, 15 и 22, 32. При этом положение сфокусированной светящейся точки в плоскости фоточувствительной площадки соответствующих указанных фотоприемных блоков соответствует угловым координатам визирной оси приемного канала, параллельной оси диаграммы направленности соответствующего лазерного пучка на выходах формирователей лазерных пучков 7 и 24. Информация о координатах указанных сформированных светящихся точек с выходов фотоприемных блоков поступает в блоки памяти 6, 23 и в блоки регистрации сигналов 16 и 33 и далее поступает в блок обработки локационных сигналов 52. В блоке 52 для каждого фотоприемного блока видимого и инфракрасного диапазона запоминаются координаты сформированных светящихся точек в виде номеров пикселей, на которые были спроектированы соответствующие точки, с которых получены сигналы, соответствующие интенсивностям световых импульсов в указанных точках. Таким образом, в блоке обработки локационных сигналов 52 для каждого фотоприемного блока идентифицированы и зарегистрированы координаты точек (пикселей) в двумерной плоскости фоточувствительной матрицы или фоточувствительной приемной площадки (видеокамеры), соответствующие двумерным угловым координатам визирной линии приемного канала, параллельной оси диаграммы направленности соответствующего лазерного пучка, сформированного на выходе (оптическом) соответствующего формирователя лазерного пучка 7 и 24. При этом направления осей диаграмм направленностей лазерных пучков, сформированных на выходах формирователей лазерных пучков 7 и 24, в ходе выполнения предыдущей процедуры настройки были установлены параллельными между собой и параллельными, например, второй оптической оси ЛЛС (вторая оптическая ось сверху на чертеже фиг.1). Следовательно, зафиксированные указанные координаты точек, соответствующие угловым координатам визирных осей приемных каналов, являются угловыми координатами визирных осей, параллельных друг другу и параллельных осям диаграмм направленности передающих каналов ЛЛС, также параллельным между собой. Таким образом, в результате выполнения рассмотренных первой и второй процедур настройки вначале установлена параллельность осей диаграмм направленности на выходах формирователей лазерных пучков 7 и 24 в передающих каналах видимого и инфракрасного диапазонов, а затем визирные оси приемных каналов видимого и инфракрасного диапазонов установлены параллельными соответствующим осям диаграмм направленностей передающих каналов видимого и инфракрасного диапазонов длин волн и, соответственно, параллельными взаимно между собой. Указанная параллельность визирных осей приемных каналов установлена программно в виде регистрации угловых координат визирных осей в блоке 52, соответствующих и параллельных осям диаграмм направленностей передающих каналов видимого и инфракрасного диапазонов. В результате на основе полученной информации в блоке 52 осуществляется программно совмещение распределения изображений, полученных (принятых) от различных четырех приемных каналов и четырех фотоприемных блоков, в единое цифровое изображение наблюдаемой местности в видимом и инфракрасном диапазоне длин волн, а также в различных длинах волн полосы фильтрации в спектральных перестраиваемых фильтрах и с возможностью регистрации тонкой временной структуры принимаемого отраженного лазерного зондирующего излучения для каждой фиксируемой точки разрешения (пикселя) в соответствующих участках (элементах) наблюдаемого изображения местности. Для регистрации единого изображения программно в блоке 52 осуществляется еще одна операция, необходимая для точного совмещения и получения суммарного изображения местности - компенсация параллакса между изображениями, регистрируемыми в каждом из четырех приемных каналов и четырех фотоприемных блоков вследствие пространственного смещения положений (центров осей) четырех приемных объективов поз.1, 11 и 18, 28. Реальное пространственное расположение приемных объективов четырех приемных каналов приведено на фиг.2. Поэтому при формировании единого изображения, например, на основе изображения местности, получаемого в первом приемном канале с помощью приемного объектива поз.1, с учетом измеренной координаты дальности до наблюдаемого объекта (сцены на местности) осуществляется компенсация смещения изображения, даваемого приемным объективом 11 по вертикали по отношению к первому приемному объективу поз.1, являющегося базовым, осуществляется компенсация смещения изображения, по горизонтали даваемого приемным объективом 18, и осуществляется компенсация смещения изображения, даваемого приемным объективом 28 по горизонтали и по вертикали (см. фиг.2). Указанная компенсация смещения соответствующих изображений при наложении изображений на условно принятое за базовое изображение, регистрируемое первым приемным объективом 1, осуществляется программно в блоке обработки локационных сигналов 52. При этом учитывается координата дальности, получаемая при приеме отраженного зондирующего импульсного лазерного сигнала во втором 15 и четвертом 32 фотоприемных блоках. Для уточнения координаты дальности возможно осуществление измерения дальности до некоторых выделенных объектов в изображении местности (подстилающей поверхности), зарегистрированной фотоприемными блоками 5 и 22. В этом случае осуществляется идентификация этих объектов в сигналах, зарегистрированных в фотоприемных блоках 15 или 32, и осуществляется определение координаты дальности до обнаруженных объектов в фотоприемных блоках 15, 32 и в блоках регистрации сигналов 16, 33, после чего полученная оценка дальности условно принимается за величину дальности до наблюдаемой местности и используется для осуществления компенсации параллактического смещения изображения при формировании суммарного изображения местности с нанесенными в соответствующих точках координатами и отметками от обнаруженных объектов на местности. При выполнении установления параллельности визирных осей приемных каналов управляемые оптические фильтры поз.4, 14, 21, 31 осуществляют функцию необходимого ослабления поступающего лазерного излучения на входы фотоприемных блоков от лазерных генераторов 9 и 26, которые в моменты времени установления параллельности визирных осей работают в режиме с пониженной мощностью генерации лазерного излучения. Следует отметить, что уже при сравнительно небольшой дальности до наблюдаемых объектов в КОП (порядка 500 метров) параллактическое смещение изображений в рядом расположенных приемных каналах (расстояние между осями не более одного метра) является весьма малым и им можно пренебречь при формировании суммарного изображения. После осуществления установления параллельности визирных осей приемных каналов уголковые отражатели с помощью блоков перемещения выводятся из оптических систем приемных и передающих каналов и не препятствуют прохождению сформированных лазерных пучков на выходах формирователей лазерных пучков 7 и 24, а также не затеняют входные апертуры приемных объективов при приеме оптических сигналов. На этом режим функционального контроля и настройки ЛЛС завершен и ЛЛС переходит в штатный режим работы и наблюдения контролируемой области пространства.
В результате штатного режима работы предлагаемой лазерной локационной системы в блоке обработки локационных сигналов 52 вырабатывается и накапливается следующая информация о характеристиках наблюдаемой местности в КОП и характеристиках объектов, обнаруженных на фоне наблюдаемой местности в КОП. В регистрах памяти блока 52 зарегистрированы распределения интенсивности наблюдаемой в КОП местности, полученные в двух основных оптических диапазонах длин волн: в видимом и в инфракрасном диапазоне. При этом в каждом из диапазонов проведена спектральная фильтрация принимаемого изображения местности (подстилающей поверхности). Сформированы и зафиксированы распределения интенсивности наблюдаемой местности в отдельных спектральных точках в видимом и в инфракрасном диапазонах длин волн. При этом спектральный анализ получаемых изображений местности осуществлен в реальном масштабе времени с помощью программно управляемых спектральных перестраиваемых фильтров видимого и инфракрасного диапазонов длин волн. Данный спектральный анализ проведен при подсвете наблюдаемой местности естественным фоновым излучением без осуществления лазерного подсвета наблюдаемой местности в КОП. В предлагаемой ЛЛС осуществляется подсвет наблюдаемой местности в КОП зондирующим лазерным излучением видимого и инфракрасного диапазонов одновременно в двух диапазонах или последовательно по времени.
Осуществляется прием и регистрация отраженного от КОП лазерного излучения в отдельных спектральных точках указанных диапазонов длин волн при выполнении спектральной фильтрации принимаемых отраженных от КОП лазерных зондирующих излучений с помощью спектральных перестраиваемых фильтров видимого и инфракрасного диапазонов длин волн. Импульсы отраженного зондирующего лазерного излучения принимаются и регистрируются в каждом приемном фоточувствительном элементе (пикселе матричного ФЭУ или фотодиоде) приемной матрицы в фотоприемных блоках поз.15 и 32. При этом регистрируется тонкая временная структура отраженного от обнаруживаемого объекта лазерного импульсного сигнала и осуществляется спектральный одномерный Фурье-анализ принимаемых импульсных лазерных сигналов с помощью специальных блоков быстрого преобразования Фурье в реальном масштабе времени или со сдвигом по времени. В блоке обработки локационных сигналов 52 осуществляется автоматическое сравнение сформированных Фурье-спектров принимаемых импульсных лазерных сигналов с банком данных таких спектров, на основании указанного сравнения осуществляется окончательное обнаружение наблюдаемых оптических и оптикоэлектронных средств наблюдения, находящихся в КОП, и идентификация (распознавание) обнаруженных объектов. Одновременно в блоке обработки локационной информации 52 определяются и фиксируются пространственные координаты каждого обнаруженного объекта, а также координаты (угловые) отдельных элементов зафиксированных изображений наблюдаемой местности в КОП в различных участках видимого и инфракрасного диапазонов длин волн. Следует отметить, что в предлагаемой ЛЛС имеется возможность приема и регистрации в фотоприемных блоках 5 и 22 отраженного зондирующего лазерного излучения, соответственно, в видимом и инфракрасном диапазонах подсвечивающего лазерного излучения. В этом случае в режиме работы лазерных генераторов и подсвета КОП зондирующим лазерным излучением осуществляется спектральная фильтрация принимаемого лазерного излучения с помощью спектральных перестраиваемых фильтров 2 и 19 и регистрация отфильтрованных лазерных сигналов с помощью фотоприемных блоков 5 и 22. Полученная видеоинформация с выходов фотоприемных блоков 5 и 22 поступает в блоки памяти 6 и 23 и далее поступает в блок обработки локационных сигналов 52. На основании полученных многоспектральных изображений наблюдаемой местности в КОП формируется суммарное многоспектральное единое изображение местности в КОП, на которую программно наносятся отметки от обнаруженных и идентифицированных объектов, находящихся в КОП и наблюдаемых на фоне полученных многоспектральных изображений местности. Указанное сформированное изображение предъявляется оператору на экране блока отображения информации 54. При этом оператору демонстрируются изображения местности с обнаруженными объектами в различных спектральных точках в видимом и в инфракрасном диапазоне длин волн, а также предъявляются параметры и характеристики обнаруженных объектов и их координаты, полученные в видимом и в инфракрасном диапазоне длин волн, и результаты спектрального Фурье-анализа и сравнения полученных спектров с банком данных для отражательных характеристик обнаруженных объектов в видимом и инфракрасном диапазонах длин волн. В результате получения и анализа большого объема информации о характеристиках обнаруженных объектов и наблюдаемой местности в КОП реализуется существенное повышение эффективности обнаружения объектов и увеличение вероятности правильного распознавания наблюдаемых на местности и обнаруженных объектов. Оператор имеет возможность определить характерные элементы местности по их естественному отраженному фоновому излучению в видимом и инфракрасном спектральных диапазонах, а также оператор получает важную информацию о расположении в указанных характерных точках и элементах местности обнаруженных объектов, имеющих определенные отражательные характеристики в видимом и инфракрасном диапазонах спектра. При этом реализуется высокая точность привязки координат обнаруженных объектов к характерным элементам наблюдаемой местности в видимом и в ИК-диапазонах. Это достигается за счет применения специальных средств для установления параллельности в пространстве визирных осей всех четырех приемных каналов и осей диаграмм направленностей обеих передающих каналов, а также в результате компенсации параллакса при приеме изображений местности в четырех параллельно работающих приемных каналах, производимой программно в зависимости от дальности до обнаруженного объекта.
В предлагаемой лазерной локационной системе использованы блоки и узлы, освоенные современной промышленностью. Использованные в ЛЛС спектральные перестраиваемые фильтры выполнены на основе перестраиваемых акустооптических фильтров (ячеек), работающих в видимом (поз.2, 12) и инфракрасном (поз.19, 29) диапазонах длин волн. Указанный акустооптический фильтр состоит из акустооптического кристалла и пьезоэлемента, возбуждающего в этом кристалле ультразвуковые волны. Используются кристаллы парателлурита, ниобата лития, кварца, прозрачные для используемых диапазонов длин волн. При распространении оптического излучения через кристалл происходит его взаимодействие с динамической фазовой структурой, возбужденной в кристалле посредством ультразвуковых волн. В результате этого происходит изменение условий распространения оптического сигнала через кристалл для определенной спектральной полосы оптического сигнала - лазерного излучения. На основании этого физического эффекта разработаны акустооптические перестраиваемые фильтры, работающие в видимом, инфракрасном, а также в ультрафиолетовом диапазонах длин волн и осуществляющие выделение (фильтрацию) узкой спектральной полосы из проходящего через кристалл оптического (лазерного) излучения. Принцип действия и характеристики акустооптических перестраиваемых фильтров, а также акустооптических быстродействующих дефлекторов лазерного излучения изложены в монографии [5] на стр.219-234 (акустооптические перестраиваемые фильтры) и на стр.134-167 (дефлекторы лазерного излучения), а также в различных публикациях [6]. Перестраиваемые акустооптические фильтры обладают высокой эффективностью, высокой разрешающей способностью, возможностью работы в широком угловом поле зрения. Перестройка длины волны узкополосной фильтрации реализуется с высоким быстродействием в динамическом режиме. В предлагаемой ЛЛС в качестве спектральных перестраиваемых фильтров использованы акустооптические фильтры видимого и инфракрасного диапазонов длин волн, работающие в режиме узкополосной перестраиваемой фильтрации проходящих оптических сигналов, аналогичных по величине полосы пропускания, например, интерференционным фильтрам или обеспечивающих более узкую полосу спектральной фильтрации, а также выполняющих функции высокоточных быстродействующих спектроанализаторов изображений в видимом и инфракрасном диапазонах длин волн. Указанные спектральные перестраиваемые фильтры содержат акустооптическую ячейку на основе акустооптического кристалла с пьезовозбудителем и специальный генератор высокочастотных электрических сигналов, формирующий специальные напряжения для возбуждения в кристалле указанных ультразвуковых волн и управляемый по сигналам от блока обработки локационных сигналов 52, который выполняет также и ряд управляющих функций и непосредственно формирует сигналы управления для установления величин длин волн пропускания (фильтрации) в спектральных перестраиваемых фильтрах 2, 12, 19, 29. Дефлекторы лазерного излучения видимого диапазона 8 и инфракрасного диапазона 25 выполнены на основе акустооптических отклоняющих ячеек - сканаторов оптического излучения [5]. В качестве лазерных генераторов 9, 26 можно использовать широкий класс лазерных генераторов с управляемой перестройкой длины волны генерации лазерного излучения в видимом и инфракрасном диапазонах длин волн на основе различных физических принципов, например, с перестройкой длины волны генерации с помощью внутрирезонаторных средств, изменения параметров резонаторов и активных сред лазеров [7].
Первый поз.5 и третий поз.22 фотоприемные блоки выполнены на основе видеокамер телевизионного типа видимого 5 и инфракрасного 22 диапазонов длин волн. Данные видеокамеры имеют чувствительность в широком спектральном диапазоне видимого или ИК-излучения и совместно со спектральными перестраиваемыми фильтрами видимого диапазона 2 и инфракрасного 19 диапазона выполняют функции спектральных анализаторов наблюдаемых изображений местности в КОП. Могут быть использованы видеокамеры любых типов, например, на основе ПЗС-матриц видимого и инфракрасного диапазонов длин волн. Фотоприемные блоки 15 и 32 выполнены на основе матричных фоточувствительных оптических приемников излучения видимого и инфракрасного диапазонов длин волн с параллельным съемом информации, имеющих высокое быстродействие и чувствительность при приеме импульсных оптических сигналов. Для фотоприемного блока 15 видимого диапазона длин волн возможно использование многоэлементных матричных фотоэлектронных умножителей (ФЭУ) на микроканальных пластинах, которые представляют собой многоэлементный детектор оптического излучения мгновенного действия с полной развязкой отдельных элементов для параллельной электронной обработки сигналов. Указанный матричный ФЭУ имеет высокую чувствительность во всем видимом диапазоне и, совместно со спектральным перестраиваемым фильтром, обладает возможностью осуществления узкополосной параллельной фильтрации принимаемых оптических сигналов видимого диапазона длин волн. [11]. Фотоприемный блок 32 ИК-диапазона выполнен на основе многоэлементной фотодиодной матрицы, например матрицы лавинных фотодиодов (ЛФД), имеющих высокую чувствительность в широком диапазоне инфракрасного излучения. Совместно со спектральным перестраиваемым фильтром 29 ИК-диапазона фотоприемный блок 32 выполняет функцию узкополосной спектральной фильтрации в инфракрасном диапазоне длин волн. В настоящее время промышленностью освоен выпуск фотодиодных матриц с размером 16×16 элементов в мозаике с полной развязкой отдельных элементов и параллельным усилением и обработкой принимаемых сигналов. Для получения большего количества приемных элементов используется установка нескольких матриц фотодиодов параллельно в одном фотоприемном блоке. Блоки регистрации сигналов 16 и 33 выполнены на основе современных интегральных электронных схем, обеспечивают параллельный съем информации с выходов фотоприемных блоков 15 и 32, оцифровку поступающих электрических сигналов, обеспечивают определение моментов времени появления импульсных электрических сигналов на выходах фотоприемных блоков относительно сигналов точного внутреннего времени ЛЛС, поступающих от блока 52, что позволяет в дальнейшем в блоке 52 осуществить определение моментов времени прихода импульсов принимаемого лазерного излучения на оптический вход фотоприемного блока 15 или 32 и определить дальность до обнаруживаемого объекта. Блоки регистрации сигналов осуществляют также буферное запоминание цифровых массивов информации, представляющих собой реализации принятых фотоприемными блоками 15, 32 импульсных сигналов отраженного зондирующего лазерного излучения, зарегистрированных отдельными фотодиодами или фоточувствительными элементами фотоприемной матрицы блоков 15, 32. Полученный массив информации вместе с некоторой дополнительной информацией о моментах времени прихода сигналов передается с выходов блоков регистрации сигналов в блок обработки локационных сигналов 52 и в блоки быстрого преобразования Фурье 17 и 34. Блок 52 представляет собой высокопроизводительный компьютер, функционально связанный по специальным интерфейсам с несколькими источниками информации, обеспечивающий обработку больших массивов информации по специальным программам. Одновременно блок обработки локационной информации 52 осуществляет управление рядом устройств и элементов в ЛЛС, принадлежащих к приемным каналам, а именно: управляет спектральными перестраиваемыми фильтрами и управляемыми оптическими фильтрами. Блок управления системой 53 представляет собой стандартную высокопроизводительную ЭВМ, осуществляющую управление работой нескольких устройств через специальные интерфейсы. Блок 53 управляет работой лазерных генераторов, дефлекторов лазерного излучения и блоками перемещения уголковых отражателей и отражательного зеркала. Блоки быстрого преобразования Фурье 17, 34 представляют собой специализированный процессор, осуществляющий операции быстрого преобразования над поступающими в цифровой форме импульсными сигналами по специальной программе. В блоках 17 и 34 возможно использование нескольких процессоров БПФ для параллельной обработки импульсных сигналов, поступающих одновременно с выходов фотодиодных матриц фотоприемных блоков 15 и 32. Возможно также использование стандартной ПЭВМ, осуществляющей операции быстрого преобразования фурье по специальной программе. Блоки памяти 6, 23 и 51 выполняют стандартную функцию кадровой памяти и представляют собой специализированные запоминающие устройства для буферного оперативного запоминания нескольких кадров видеоизображений с выходов фотоприемных блоков (видеокамер) 5, 22, 50. Управляемые оптические фильтры служат для защиты фотоприемных блоков от лазерного излучения высокой интенсивности и выполнены на основе электрооптических управляемых модуляторов света, например на основе жидких кристаллов, и работают в диапазонах видимых и инфракрасных длин волн. Возможно также использование управляемых шаговыми электродвигателями диафрагм, механически перекрывающих световой поток в оптической системе. Блоки перемещения уголковых отражателей и отражательного зеркала выполнены на основе шаговых электродвигателей и механических элементов. Люминофорный экран 47 осуществляет функцию визуализации инфракрасного излучения для обеспечения возможности регистрации излучений видимого и инфракрасного диапазонов одним и тем же фотоприемным блоком видимого диапазона длин волн поз.50 при осуществлении режима функциональной настройки ЛЛС. Люминофорный экран 47 выполнен на основе любого вещества, обладающего фотолюминесценцией-возбуждением под воздействием достаточно сильного оптического излучения, в результате которого испускается излучение видимого диапазона длин волн. К таким веществам относится, например, соединение сернистого цинка. Одновременно люминофорный экран 47 выполняет функции отражательного экрана для оптического излучения видимого диапазона от лазерного генератора поз.9.
Размеры контролируемой области пространства в предлагаемой лазерной локационной системе определяются угловыми полями зрения используемых приемных объективов. Для увеличения размеров контролируемой области пространства совместно с ЛЛС может быть использован стандартный блок сканирования, который обеспечивает расширение размеров указанной контролируемой области пространства ЛЛС до размеров всей верхней полусферы. На фиг.2 условно показана стыковка такого блока сканирования с оптическими входами и выходами предлагаемой ЛЛС. Блок сканирования представлен отражательными зеркалами 56 и 57. При этом отражательное зеркало 56 оптически связано с оптическими входами и выходами приемных объективов 1, 11, 18, 28 ЛЛС и формирователями лазерных пучков поз.7 и 24, как это показано на фиг.2. Отражательное зеркало 56 вращается вокруг оси, параллельной оптическим осям приемных и передающих каналов ЛЛС. Отражательное зеркало 57 при сканировании вращается вокруг оси, перпендикулярной оси вращения зеркала 56. Отражательное зеркало 57 при сканировании совместно с отражательным зеркалом 56 обеспечивает направление диаграмм направленностей передающих каналов ЛЛС и визирных осей приемных каналов ЛЛС в любую точку пространства в верхней полусфере. Данный блок сканирования не входит в состав аппаратуры предлагаемой ЛЛС. Устройство указанного блока сканирования изложено в работе автора [10].
В предлагаемой ЛЛС в качестве спектрального перестраиваемого фильтра возможно использование квантового усилителя, разработанного на основе фотодиссоционного йодного лазера, получившего название активный квантовый фильтр [8], [9]. Данный активный квантовый фильтр обладает предельно высокой чувствительностью, ограниченной квантовым пределом чувствительности, весьма узкой спектральной полосой приема лазерного излучения в ближнем инфракрасном диапазоне длин волн, возможностью оперативной перестройки длины волны узкополосной фильтрации принимаемого оптического сигнала с помощью управляемого магнитного поля.
Источники информации
[1] Патент Англии GB №2256554 от 09.12.1992 г.
[2] Патент РФ №2277254 от 24.12.2003 г.
[3] Патент РФ №2129287
[4] Патент РФ №2278399 от 20.06.2006 г. (прототип).
[5] Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. - М.: Радио и связь, 1985 г. (стр.219-234); (стр.134-167).
[6] Балакший В.И., Манкевич С.К., Парыгин В.Н. Квантовая электроника, т.12, №4, 1985 г., стр.743-748.
[7] Справочник по лазерной технике под ред. Напартовича А.П., М. Энергоиздат 1991 г.
[8] Манкевич С.К., Носач О.Ю. Патент РФ №2133533 от 20.07.1999 г. Способ спектральной фильтрации оптических сигналов и устройство для его осуществления - активный квантовый фильтр.
[9] Кутаев Ю.Ф., Манкевич С.К., Носач О.Ю., Орлов Е.П. Квантовая электроника, Т.30, №9, 2000 г., стр.833-838. Лазерное приемное устройство с квантовым пределом чувствительности в ближнем ИК-диапазоне.
[10] Манкевич С.К., Носач О.Ю., Орлов Е.П. патент РФ №2191406 от 19.06.2001 г. Способ доставки излучения на движущийся объект и устройство для его осуществления.
[11] ПТЭ, №1, 184 (1993 г.), И.Ф. Ярошенко, Многоэлементный ФЭУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |

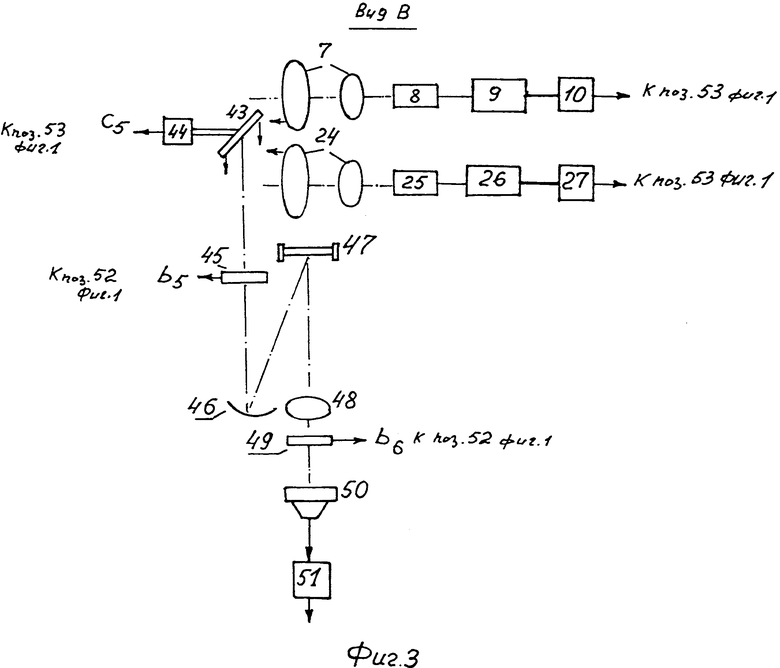
Изобретение относится к лазерной локации и может быть использовано в локационных наземных стационарных и мобильных комплексах лазерной локации для обнаружения и распознавания оптических и оптоэлектронных приборов. Локационная система осуществляет спектральный анализ наблюдаемых изображений местности в видимом и инфракрасном диапазонах длин волн, а также спектральный фурье-анализ тонкой структуры отраженных от обнаруживаемых объектов лазерных зондирующих импульсов. Система содержит лазерные генераторы с перестройкой длины волны генерации, спектральные перестраиваемые фильтры на основе акустооптических ячеек, фотоприемные блоки видимого и инфракрасного диапазона длин волн на основе видеокамер и матричных фоточувствительных многоэлементных приемников оптических сигналов. Технический результат - повышение эффективности обнаружения и вероятности распознавания оптических и оптоэлектронных приборов и средств наблюдения, повышение точности определения координат обнаруженных объектов и привязки их координат к координатам и характерным элементам наблюдаемой местности. 6 з.п. ф-лы, 3 ил.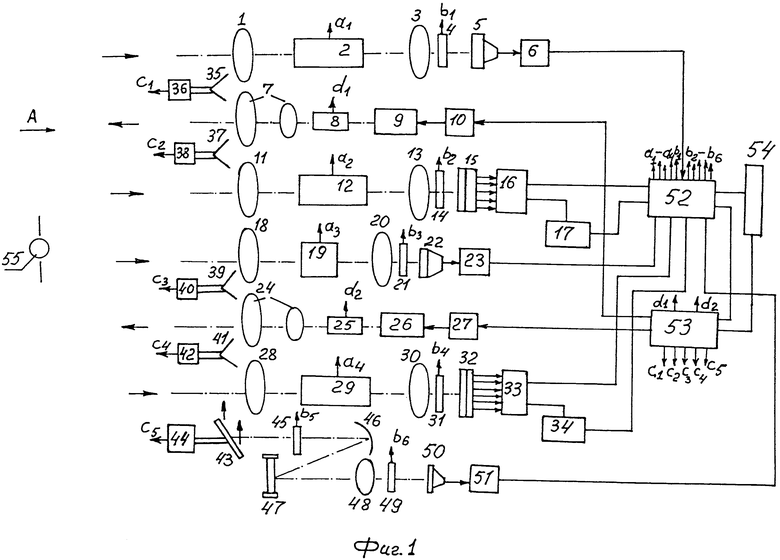
1. Лазерная локационная система, содержащая установленные на первой оптической оси оптически связанные первый приемный объектив, первый фотоприемный блок, выход которого подключен к первому блоку памяти, установленные на второй оптической оси оптически связанные первый формирователь лазерного пучка, первый лазерный генератор с блоком управления, подключенный к блоку управления системой, установленные на третьей оптической оси оптически связанные второй приемный объектив и второй фотоприемный блок, блок отображения информации, подсоединенный к блоку управления системой, отличающаяся тем, что введены три фотоприемных блока, два блока памяти, два блока регистрации сигналов, два приемных объектива, шесть управляемых оптических фильтров, пять линз, четыре спектральных перестраиваемых фильтра, блок обработки локационных сигналов, второй лазерный генератор с блоком управления, второй формирователь лазерного пучка, два дефлектора лазерного излучения, два блока быстрого преобразования Фурье (БПФ), четыре уголковых отражателя с блоками перемещения, вогнутое зеркало, отражательное зеркало с блоком перемещения, люминофорный экран, при этом на первой оптической оси последовательно установлены между первым приемным объективом и первым фотоприемным блоком оптически связанные первый спектральный перестраиваемый фильтр, первая линза и первый управляемый оптический фильтр, первый дефлектор лазерного излучения установлен на второй оптической оси между первым формирователем лазерного пучка и первым генератором лазерного излучения, на третьей оптической оси между вторым приемным объективом и вторым фотоприемным блоком последовательно установлены оптически связанные второй спектральный перестраиваемый фильтр, вторая линза и второй управляемый оптический фильтр, выходы второго фотоприемного блока подключены ко входам первого блока регистрации сигналов, на четвертой оптической оси последовательно установлены оптически связанные третий приемный объектив, третий спектральный перестраиваемый фильтр, третья линза, третий управляемый оптический фильтр и третий фотоприемный блок, выход которого подключен к второму блоку памяти, на пятой оптической оси последовательно установлены оптически связанные второй формирователь лазерного пучка, второй дефлектор лазерного излучения и второй лазерный генератор с блоком управления, подключенным к блоку управления системой, на шестой оптической оси последовательно установлены оптически связанные четвертый приемный объектив, четвертый спектральный перестраиваемый фильтр, четвертая линза, четвертый управляемый оптический фильтр и четвертый фотоприемный блок, выходы которого подсоединены ко второму блоку регистрации сигналов, на седьмой оптической оси последовательно установлены оптически связанные отражательное зеркало с блоком перемещения, пятый управляемый оптический фильтр, вогнутое зеркало, люминофорный экран, пятая линза, шестой управляемый оптический фильтр и пятый фотоприемный блок, выход которого подключен к третьему блоку памяти, оптический вход пятого управляемого оптического фильтра посредством отражательного зеркала оптически связан с выходами первого и второго формирователей лазерных пучков, первый уголковый отражатель оптически связывает оптический вход первого приемного объектива с оптическим выходом первого формирователя лазерного пучка, оптический вход второго приемного объектива посредством второго уголкового отражателя оптически связан с выходом первого формирователя лазерного пучка, оптический выход второго формирователя лазерного пучка оптически связан посредством третьего и четвертого уголковых отражателей с оптическими входами третьего и четвертого приемных объективов, входы первого и второго блоков быстрого преобразования фурье подсоединены соответственно к выходам первого и второго блоков регистрации сигналов, а выходы подключены ко входам блока обработки локационных сигналов, управляющие входы спектральных перестраиваемых фильтров подключены к блоку обработки локационных сигналов, выходы первого второго и третьего блоков памяти и двух блоков регистрации сигналов подключены ко входам блока обработки локационных сигналов, управляющие входы управляемых оптических фильтров подсоединены к блоку обработки локационных сигналов, выходы которого подключены к блоку управления системой и к блоку отображения информации, управляющие входы блоков перемещения уголковых отражателей и блока перемещения отражательного зеркала подключены к блоку управления системой, блок управления вторым лазерным генератором подсоединен к блоку управления системой, управляющие входы дефлекторов лазерного излучения подключены к блоку управления системой.
2. Лазерная локационная система по п.1, отличающаяся тем, что в ней первый и второй лазерные генераторы выполнены на основе лазеров видимого и инфракрасного диапазонов длин волн с возможностью перестройки длин волн генерируемых лазерных излучений.
3. Лазерная локационная система по п.1, отличающаяся тем, что в ней первый и пятый фотоприемные блоки выполнены на основе видеокамер видимого диапазона длин волн.
4. Лазерная локационная система по п.1, отличающаяся тем, что в ней третий фотоприемный блок выполнен на основе видеокамеры инфракрасного диапазона длин волн.
5. Лазерная локационная система по п.1, отличающаяся тем, что в ней второй и четвертый фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
6. Лазерная локационная система по п.1, отличающаяся тем, что в ней спектральные перестраиваемые фильтры выполнены на основе акустооптической перестраиваемой ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
7. Лазерная локационная система по п.1, отличающаяся тем, что в ней спектральные перестраиваемые фильтры выполнены на основе квантового (лазерного) усилителя - активного квантового фильтра, перестраиваемого по величине длины волны узкополосной фильтрации с помощью магнитного поля.
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| WO 1994004942 A1, 03.03.1994 | |||

