Заявляемое изобретение относится к радиотехнике и может быть использовано при конструировании радиоприемных устройств, работающих в условиях многолучевого распространения радиосигналов.
Известно решение проблемы уверенного приема сигналов за счет синхронизации (определения момента прихода радиосигнала) в условиях многолучевости, основанное на выделении переднего фронта прямого сигнала. Технически оно основано на использовании узких стробов дискриминатора, ширина которых должна быть меньше, чем запаздывание Δτ отраженного луча относительно прямого. В настоящее время известно достаточно много подобных способов, в частности, один из способов известен как Strobe and Edge Correlator и описан в докладе Garin L., Van Diggelen F. and Rousseau J.M. "Strobe and Edge Correlator Multipath Mitigation for Code", proceedings of ION GPS-96, Kansas City, September 17-20 [1].
Более усовершенствованные способы появились несколько позже. Среди них надо отметить разработку тех же авторов, известную как Enhanced Strobe Correlator, описанную в Garin L. and Rousseau J.M. "Enhanced Strobe Correlator Multipath Rejection for Code and Carrier", proceedings of ION GPS-97, Kansas City, September 16-19 [2], а также техническое решение "ММТ" сотрудников фирмы Leica Hatch R., Keegan R. and Stansell T. "Leica's Code and Phase Multipath Mitigation Techniques", proceedings of ION National Technical Meeting, Santa Monica, January 14-16 [3]. Сходные решения других разработчиков известны под аббревиатурами HRC (McGraw G. and Braasch M. "GNSS Multipath Mitigation Using Gated and High Resolution Correlator Concepts", proceedings of ION National Technical Meeting, San Diego, January 25-27 [4].) и MEDLL (Townsend В., Van Nee R., Fenton P. and Van Dierendonck K. "Performance Evaluation of the Multipath Estimating Delay Lock Loop", proceedings of ION National Technical Meeting, Anaheim, January 18-20 [5]).
Указанные способы борьбы с многолучевостью за счет синхронизации получили свое воплощение в навигационных приемниках таких производителей, как Ashtech (Magellan), JNS, Leica, NovAtel, Topcon, Trimble и др.
Наиболее близким к заявляемому изобретению является способ синхронизации с помощью узкополосного коррелятора (Narrow Correlator), опубликованный американскими специалистами Van Dierendonck A.J., Fenton P. and Ford T. "Theory and Performance of Narrow Correlator Spacing in a GPS Receiver", proceedings of ION National Technical Meeting, San Diego, January 27-29 [6].
Недостатком, общим для всех известных решений, является тот факт, что для обеспечения разделения лучей необходимо использовать широкополосный RF Front-End, чтобы ширина фронта прямого сигнала τф не превысила запаздывания отраженного сигнала Δτ. При этом использование широкополосных фильтров и узких стробов приводит к ряду проблем:
- ухудшается частотная селекция узкополосных индустриальных помех в широкополосных фильтрах RF Front-End;
- становится невозможным использование промышленных RF Front-End со стандартной шириной полосы (как, например, RF Front-End, разработанные в соответствии со стандартом для беспроводной связи в диапазоне частот 2,4 ГГц), что приводит к удорожанию конечных устройств;
- известные способы не обеспечивают правильного определения момента прихода прямого сигнала, если запаздывание отраженных сигналов кратно длительности элемента широкополосных фазоманипулированных сигналов, а также, если запаздывание отраженных сигналов меньше ширины используемых стробов;
- применение известных способов характеризуется режектированием сигналов с задержками более ширины строба. Помимо подавления отраженных сигналов это также приводит и к подавлению части мощности прямого сигнала, уменьшая тем самым вероятность правильного извлечения битов цифровой информации, содержащихся в принимаемом радиосигнале.
Предлагаемым изобретением решается задача более эффективного выделения прямого сигнала из входной смеси, состоящей из прямого и отраженных сигналов. При этом исходной предпосылкой является обеспечение высокоточной синхронизации (определения момента прихода сложного фазоманипулированного сигнала) в условиях, когда запаздывания мешающих отраженных сигналов Δτ могут быть меньше ширины фронта сигнала τф.
Для достижения этого технического результата предлагается в первую очередь обеспечить компенсацию отраженных сигналов из принимаемой смеси прямого и отраженных сигналов. Основная трудность такой компенсации состоит в сложности формирования оценки отраженного сигнала для его вычитания из входной смеси. Это связано, прежде всего, с возможным сложным составом мешающего запаздывающего сигнала, являющегося в большинстве случаев смесью множества отдельных отраженных сигналов с разными случайными задержками, амплитудами и фазами. Кроме того, точной оценке отраженного сигнала мешает и наличие прямого сигнала, также имеющего случайные параметры.
Преодоление указанной трудности основано на совместной оценке совокупности случайных параметров всего входного сигнала, представляемого в виде

Здесь А - комплексная амплитуда прямого сигнала,
τ - момент прихода сигнала (задержка прямого сигнала),
αi - комплексные амплитуды отдельных составляющих отраженного сигнала, имеющих задержки i·Δ, причем Δ - минимально различимая задержка между составляющими, принимаемая равной периоду дискретизации сигнала (Δ=l/Fcl),
n(t) - внутренний шум приемника.
Согласно синтезу оптимального алгоритма наилучшая среднеквадратичная оценка вектора α, составленного из весов отраженных сигналов αi, i=1...L, получаемая для каждого значения τ=k·Δ из диапазона неопределенности τ при фиксированном значении А, равна
где К - матрица коэффициентов размером L×L, определяемая формой сигнала, уровнем внутренних шумов и априорной информацией о величине комплексных амплитуд прямого и отраженного сигналов,
qτ - вектор длиной L, содержащий отсчеты сигнала на выходе коррелятора, вычисленные для соответствующих значений задержки сигнала τ+Δ,..., τ+L·Δ.
Таким образом, вектор комплексных амплитуд отраженных сигналов получают в виде линейной комбинации L последовательных по задержке выходов коррелятора, а алгоритм оценки задержки сигнала сводят к поиску максимума функционала

где q0 - отсчет сигнала на выходе коррелятора для задержки τ,
а - вектор длиной L, учитывающий взаимную корреляцию прямого и отраженных сигналов с задержками Δ,..., L·Δ относительно прямого,
К0 - весовой коэффициент.
Первое слагаемое, стоящее в выражении, определяет вклад прямого сигнала, второе - вклад отраженных сигналов, при этом максимум функционала достигается в точке истинного значения задержки сигнала.
При практической реализации алгоритм оценки задержки сигнала сводят к начальному поиску сигнала по частоте и задержке (Preliminary Signal Search Engine) с последующим вычислением значений сигнала на выходе коррелятора для набора значений τ в окрестности начальной оценки задержки τpre (Multi-channel Correlator), расчетом значений функционала L(τ) и поиском его максимума (Signal Delay Estimator). После оценки истинной задержки сигнала τest и комплексных коэффициентов отраженных сигналов α осуществляют компенсацию отраженных сигналов в принимаемой смеси ξ(τ) (Reflected Signal Compensator). Получаемый на выходе сигнал s(t), свободный от искажений, вызванных влиянием отраженных сигналов, подают на Digital Information Extractor с целью извлечения содержащейся в сигнале полезной цифровой информации Θ.
На фиг.1 представлен алгоритм выполнения заявляемого способа, где:
1 - "Preliminary signal search engine" осуществляет начальный поиск сигнала по частоте и задержке (обнаружение сигнала и предварительная оценка его параметров).
2 - "Multi-channel correlator" осуществляет корреляцию входного сигнала с совокупностью опорных сигналов (signal replica) в диапазоне возможных значений задержек прямого сигнала.
3 - "Signal delay estimator" осуществляет определение задержки прямого сигнала τest, а также оценку комплексных амплитуд α отраженных сигналов.
4 - "Reflected signal compensator" осуществляет компенсацию мешающих отражений во входной сигнальной смеси.
5 - "Digital information extractor" осуществляет извлечение содержащейся в сигнале полезной цифровой информации.
Вычислительная сложность алгоритма, представленного на фиг.1, составляет порядка 2·N·L·(L+2) операций умножения и сложения, где N - число анализируемых позиций по задержке сигнала.
Работоспособность рассмотренного алгоритма и оценки его характеристик осуществлялась на основе моделирования. Входную сигнальную смесь моделировали как сумму прямого и отраженных сигналов, затем сигнал пропускали через фильтр с шириной полосы, обратно пропорциональной длительности элементарного импульса псевдослучайной последовательности, и после этого полученный сигнал подвергали обработке в соответствии с алгоритмом с целью оценки задержки прямого сигнала.
Результаты моделирования представлены на приведенных ниже графиках (фиг.2-4).
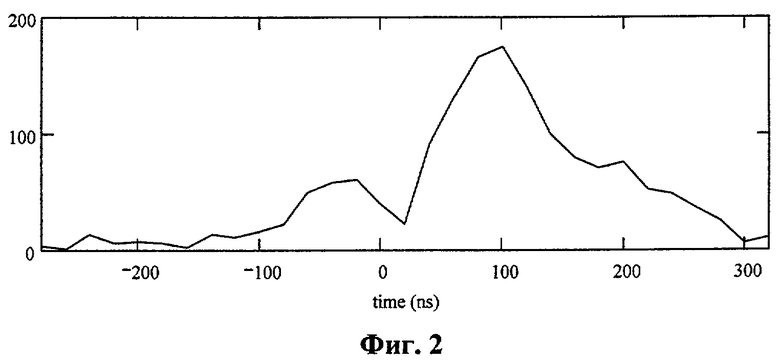
На фиг.2 представлен модуль сигнала на выходе многоканального коррелятора (прямому сигналу соответствует нулевое положение по задержке). Как видно, наличие отраженных сигналов полностью искажает форму прямого сигнала, делая практически невозможным определение истинной задержки сигнала.
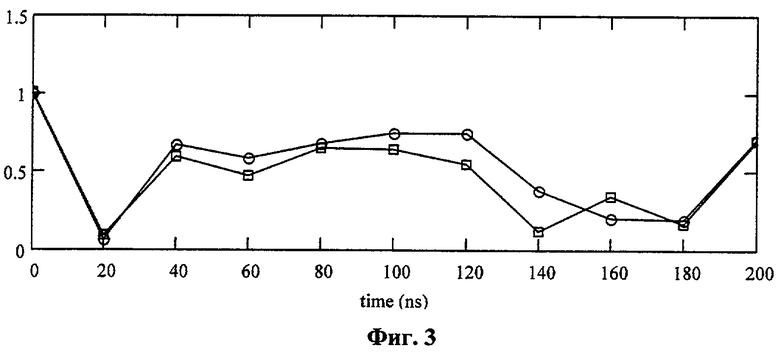
На фиг.3 представлены модули комплексных коэффициентов для прямого и отраженных сигналов. Нулевая задержка соответствует прямому сигналу. Кривая с круглыми маркерами соответствует истинному значению комплексных коэффициентов, заданных при моделировании, кривая с квадратными маркерами соответствует модулю оценок комплексных коэффициентов, полученных как  для τ=0. Видно, что оценки комплексных амплитуд близки к истинным значениям.
для τ=0. Видно, что оценки комплексных амплитуд близки к истинным значениям.
На фиг.4 представлен отклик принимаемого сигнала на выходе коррелятора (кривая с круглыми маркерами) и отклик сигнала на выходе коррелятора после компенсации отраженных сигналов (кривая с квадратными маркерами). Видно, что форма сигнального отклика, полученная после компенсации отраженных сигналов, близка по форме к отклику в случае приема одиночного (прямого) сигнала. Таким образом, оценка комплексных коэффициентов ατ и их последующее использование для компенсации отраженных сигналов позволяет восстановить форму отклика прямого сигнала на выходе коррелятора и тем самым обеспечить высокую точность оценки истинной задержки прямого сигнала. При этом точность оценки задержки определяется шириной полосы фильтра, используемой в аналоговой части приемника (т.е. шириной автокорреляционной функции сигнала, пропущенного через фильтр) и отношением сигнал/шум. В рассматриваемых при моделировании условиях точность оценки задержки составляет порядка 1...2 нс (или 0,3-0,6 м).
Таким образом, рассмотренный способ позволяет
- оценить с высокой точностью момент прихода (истинную задержку) радиосигнала;
- оценить амплитуды и фазы мешающих отраженных сигналов;
- компенсировать отраженные сигналы во входной смеси, подготовив сигнал для извлечения битов цифровой информации.
Следует отметить, что способ позволяет компенсировать в сигнале именно отраженные сигналы, прямой сигнал при этом не искажается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ФАЗЫ НАВИГАЦИОННОГО СИГНАЛА НА ФОНЕ МЕШАЮЩИХ ОТРАЖЕНИЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ И НАВИГАЦИОННЫЙ ПРИЕМНИК С УСТРОЙСТВОМ ПОДАВЛЕНИЯ МЕШАЮЩИХ ОТРАЖЕНИЙ ПРИ ОЦЕНКЕ ФАЗЫ | 2016 |
|
RU2625804C1 |
| Способ обнаружения, оценки параметров и подавления имитационных помех и навигационный приемник с устройством обнаружения, оценки параметров и подавления имитационных помех | 2020 |
|
RU2737948C1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2001 |
|
RU2237256C2 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2553709C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2510708C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2524843C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483318C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ВРЕМЕНИ ПРИХОДА РАДИОСИГНАЛА | 2011 |
|
RU2450448C1 |
Изобретение относится к радиотехнике и может быть использовано при конструировании радиоприемных устройств. Достигаемым техническим результатом является обеспечение высокоточной синхронизации. Для этого в способе синхронизации радиосигнала в условиях многолучевого распространения радиосигнала с определением момента прихода широкополосного сигнала, сопровождаемого совокупностью мешающих отраженных сигналов, осуществляют формирование вектора q корреляций входного сигнала с совокупностью опорных передаваемых сигналов, перекрывающих область возможных моментов появления прямого и отраженного сигналов с дискретностью, обеспечивающей четкое прописывание фронта сигнала, при этом частота дискретизации превышает ширину полосы пропускания используемого в RF Front-End фильтра более чем в 4 раза; формирование векторов оценок комплексных амплитуд, включающих амплитуды и фазы прямого и отраженных сигналов для каждого из значений задержки прямого сигнала как взвешенных сумм сформированных корреляций  формирование функционала правдоподобия вида
формирование функционала правдоподобия вида  для каждого из значений задержки прямого сигнала; определение момента прихода прямого сигнала на основе поиска максимума функционала
для каждого из значений задержки прямого сигнала; определение момента прихода прямого сигнала на основе поиска максимума функционала  . 4 ил.
. 4 ил.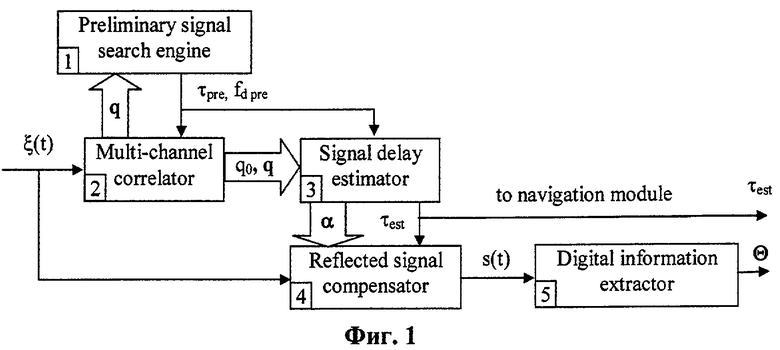
Способ синхронизации радиосигнала в условиях многолучевого распространения радиосигнала с определением момента прихода широкополосного сигнала, сопровождаемого совокупностью мешающих отраженных сигналов, включающий формирование вектора q корреляций входного сигнала с совокупностью опорных передаваемых сигналов, перекрывающих область возможных моментов появления прямого и отраженного сигналов с дискретностью, обеспечивающей четкое прописывание фронта сигнала, при этом частота дискретизации превышает ширину полосы пропускания фильтра, используемого в радиочастотном тракте фильтра, более чем в 4 раза; формирование векторов оценок комплексных амплитуд, включающих амплитуды и фазы прямого и отраженных сигналов для каждого из значений задержки прямого сигнала как взвешенных сумм сформированных корреляций

где К - матрица коэффициентов размером L×L, определяемая формой сигнала, уровнем внутренних шумов и априорной информацией о величине комплексных амплитуд прямого и отраженного сигналов;
τ - момент прихода сигнала (задержка прямого сигнала);
qτ - вектор длиной L, содержащий отсчеты сигнала на выходе коррелятора, вычисленные для соответствующих значений задержки сигнала τ+Δ, ..., τ+L·Δ, где Δ - частота дискретизации;
формирование функционала правдоподобия вида

для каждого из значений задержки прямого сигнала,
где q0 - отсчет сигнала на выходе коррелятора для задержки τ;
а - вектор длиной L, учитывающий взаимную корреляцию прямого и отраженных сигналов с задержками Δ, ..., L·Δ относительно прямого;
К0 - весовой коэффициент;
определение момента прихода прямого сигнала на основе поиска максимума функционала  .
.
| Van Dierendonck A.J., Fenton P | |||
| and Ford T | |||
| Theory and Performance of Narrow Correlator Spacing in GPS Reseiver | |||
| Proceedings of ION National Technical Meeting | |||
| San Diego, 1997, January 27-29 | |||
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| УСТРОЙСТВО ДЛЯ КОГЕРЕНТНОГО ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И КОГЕРЕНТНЫЙ ПРИЕМНИК ДАННЫХ | 1996 |
|
RU2119254C1 |
| US 5490165 A, 06.02.1996. | |||

