Предлагаемое изобретение относится к радиолокации, в частности к бортовым радиолокационным измерителям высоты летательного аппарата (ЛА) относительно земной поверхности.
Изобретение может быть использовано на разных ЛА, в том числе на вертолетах на участке пилотирования и проведения монтажных работ.
Для безопасной навигации ЛА широко используются траекторные измерения высоты полета ЛА. Задачу таких измерений обычно выполняет радиовысотомер. Имеются варианты построения радиовысотомеров, в том числе с импульсным и непрерывным сигналом.
Известен вариант радиовысотомера с непрерывным ЛЧМ сигналом [1]. В этом варианте через передающую антенну в сторону Земли излучается непрерывный ЛЧМ сигнал, девиация и период модуляции которого постоянны, отраженный сигнал, принятый приемной антенной, смешивается с частью излучаемого сигнала с получением сигнала биений, который подвергается спектральному анализу, путем сравнения составляющих спектра с порогом находят самую низкую частоту спектра, соответствующую высоте ЛА, которую индицируют.
Недостатком способа является влияние разных участков протяженной отражающей поверхности на форму огибающей амплитуды отраженного сигнала (спектра сигнала биений) через боковые лепестки приемного фильтра, согласованного с модуляцией зондирующего сигнала, соответственно на погрешность измерения. Уменьшение погрешности измерения за счет увеличения разрешения зондирующего сигнала по дальности достигается ценой увеличения мощности передатчика.
Способ измерения высоты [2] взят в качестве способа-прототипа и устройства-прототипа. Согласно способу в сторону поверхности Земли излучают зондирующий сигнал с фиксированными параметрами модуляции (в качестве зондирующего использован непрерывный ЛЧМ сигнал), принимают отраженный сигнал на N периодах повторения, фильтруют в согласованном с модуляцией зондирующего сигнала фильтре с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала (смешивают зондирующий и отраженные сигналы с получением сигнала биений и находят его спектр), находят огибающую мощности отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, мощность сигнала в выборке вычисляется как сумма квадратов квадратурных составляющих выборки сигнала на выходе согласованного фильтра (спектроанализатора), преобразуют каждую выборку огибающей мощности отраженного сигнала в бинарную с использованием порогового обнаружения, складывают одноименные бинарные выборки N огибающих мощности отраженного сигнала (одноименных бинарных спектральных составляющих мощности сигнала биений), определяют высоту по положению первого максимума суммы N бинарных огибающих мощности.
Недостатком способа является влияние разных участков протяженной отражающей поверхности на форму огибающей амплитуды отраженного сигнала (спектра сигнала биений) через боковые лепестки приемного фильтра, согласованного с модуляцией зондирующего сигнала, соответственно на погрешность измерения.
Целью предполагаемого изобретения является снижение флюктуационной погрешности измерения высоты за счет учета корреляционных связей в каналах приема.
Поставленная цель достигается за счет излучения сигнала с фиксированными параметрами модуляции в сторону поверхности Земли,
приема отраженных сигналов на N периодах повторения,
фильтрации принятого сигнала в фильтре, согласованном с модуляцией зондирующего сигнала с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала,
нахождения на N периодах повторения огибающей мощности отраженного сигнала на выходе согласованного фильтра с шагом выборки, соответствующим разрешению зондирующего сигнала,
расчета предварительных оценок высоты, дисперсии сигнала с шумом и дисперсии шума, формирования гипотез о высоте ЛА в доверительном интервале с центром, равным предварительной оценке высоты, расчета для каждой гипотезы матрицы-гипотезы взаимных дисперсий, определителя матрицы-гипотезы взаимных дисперсий и обратной матрицы-гипотезы взаимных дисперсий, расчета функционала соответствия принятого сигнала гипотезе, нахождения гипотезы, соответствующей максимуму функционала соответствия, соответственно задержки отраженного сигнала и высоты, при этом функционал соответствия принятого сигнала гипотезе вычисляют как отрицательную сумму трех слагаемых, первое слагаемое - произведение числа периодов модуляции зондирующего сигнала, используемых при наблюдении, на натуральный логарифм определителя корреляционной матрицы-гипотезы взаимных дисперсий, второе слагаемое - половинная сумма произведений транспонированного вектора косинусных составляющих сигнала, принятого в n-й период, на обратную матрицу-гипотезу взаимных дисперсий и на вектор косинусных составляющих принятого сигнала, принятого в тот же n-й период, для всех n от 0 до N-1, третье слагаемое рассчитывается аналогично второму с заменой векторов косинусных составляющих сигнала, принятого в n-й период, на вектора синусных составляющих сигнала, принятого в тот же n-й период.
При описании предлагаемого способа используются временные выборки огибающей амплитуды отраженного сигнала, положение которых относительно зондирующего сигнала и нижней границы доверительного интервала τ0 соответствует фиг.1.
Предлагаемый способ измерения высоты ЛА заключается в следующем.
Излучают зондирующий сигнала к земной поверхности.
Принимают отраженный сигнал на N периодах повторения.
Фильтруют принятый сигнал в фильтре, согласованном с модуляцией зондирующего сигнала с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала.
Находят на N периодах повторения огибающую мощности отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, мощность сигнала в выборке считается как сумма квадратов квадратурных составляющих выборки сигнала на выходе согласованного фильтра.
Вычисляют суммарную огибающую мощности отраженного сигнала как сумму одноименных выборок мощности сигнала на N периодах повторения,
Находят первичную оценку задержки отраженного сигнала τП, соответствующую положению первого максимума суммарной огибающей мощности, превышающего порог обнаружения.
Находят дисперсию сигнала с шумом 
Находят дисперсию шума 
Выдвигают гипотезу задержки отраженного сигнала τk, соответствующую высоте ЛА, 
Рассчитывают для каждой k-й гипотезы матрицу взаимных дисперсий выборок отраженного сигнала на выходе согласованного фильтра 

где R1(τk)=|R1k(τk,ti,tj)|; R2=|R2(ti,tj)|;

элемент матрицы R1k(τk);

s(t) - модуляция зондирующего сигнала;
TC - период модуляции зондирующего сигнала;
τ - задержка отраженного сигнала.
Вычисляют функционал соответствия огибающей амплитуды Z сигнала согласованного фильтра k-й гипотезе:


где ZCn и ZSn - вектор-сигналы, координаты которых - косинусные и синусные составляющие спектра сигнала биений на n-м периоде повторения соответственно.
Вывод (4) приведен в Приложении 1.
Перебором гипотез о задержке отраженного сигнала находят гипотезу τk, для которой функционал соответствия LУ(Z/τk) максимален, соответственно оценку смещения высоты 
Проведено моделирование оценки положения отраженного сигнала по положению максимума функционала соответствия в зависимости от соотношения сигнал шум q, по которым определено отклонение математического ожидания Δτ и средне квадратичное отклонение στ оцениваемого параметра при N=10. Результаты оценки при применении в качестве зондирующего простого сигнала сведены в таблицу 1.
Вид совместной плотности вероятности соответствия выборок сигнала согласованного фильтра гипотезе по одиночной реализации и по множеству из N=32 реализаций при числе выборок сигнала на реализации равном 5 приведен на фиг.2. Вид подтверждает то, что при работе по N реализациям распределение оценки симметричное с математическим ожиданием оценки высоты, близким к истинному.
Сущность изобретения радиовысотомера, реализующего способ измерения высоты, поясняется дальнейшим описанием, Приложением 1 и чертежами.
В Приложении 1 приведено описание адаптивного алгоритма определения высоты.
На фиг.1 изображены точки временных выборок относительно зондирующего сигнала и огибающей сжатого отраженного сигнала.
На фиг.2 приведен пример поведения совместной плотности вероятности соответствия выборок сигнала гипотезе для одиночных реализаций согласованного фильтра и при работе по N реализациям.
На фиг.3 изображена структурная схема радиовысотомера.
На фиг.4 изображена амплитудно-частотная характеристика полосового фильтра.
На фиг 3 приняты следующие обозначения:
1 - Синхронизатор (СНХ);
2 - Передатчик ЛЧМ сигнала (ПРД);
3 - Передающая антенна (А1);
4 - Полосовой фильтр (ПФ);
5 - Смеситель (СМ);
6 - Малошумящий усилитель (МШУ);
7 - Приемная антенна (А2);
8 - Аналого-цифровой преобразователь (АЦП);
9 - Вычислитель высоты (ВВ);
10 - Программируемая логическая интегральная схема (ПЛИС);
11 - Блок быстрого преобразования Фурье (БПФ);
12 - Вычислитель первичных оценок параметров гипотез (ВПО);
13 - Вычислитель функционала соответствия спектра сигнала биений гипотезе (ВФС).
На фиг.3 последовательно соединены синхронизатор 1, передатчик ЛЧМ сигнала 2 и передающая антенна 3, последовательно соединены приемная антенна 7, малошумящий усилитель 6, смеситель 5, полосовой фильтр 4, аналого-цифровой преобразователь (АЦП) 8, блок быстрого преобразования Фурье (БПФ) 11, вычислитель функционала соответствия спектра сигнала биений гипотезе (ВФС) 13, вычислитель высоты 9 и программируемая логическая интегральная схема (ПЛИС) 10, при этом второй выход передатчика ЛЧМ сигнала 2 соединен с вторым входом смесителя 5, второй выход синхронизатора 1 соединен с вторым входом вычислителя первичных оценок 12, выход ПЛИС 10 соединен с вторым входом вычислителя функционала соответствия спектра сигнала биений гипотезе 13, выход блока БПФ 11 соединен через вычислитель первичных оценок 12 с первым входом вычислителя высоты 9, второй выход вычислителя первичных оценок 12 соединен с первым входом вычислителя функционала соответствия 13, первый выход вычислителя высоты 9 является выходом радиовысотомера для выдачи потребителю результата измерения.
Синхронизатор 1, вычислитель высоты 9, блок БПФ 11, вычислитель первичных оценок 12, вычислитель функционала соответствия спектра сигнала биений гипотезе 13 радиовысотомера, изображенного на фиг.3, могут быть выполнены на основе единой бортовой вычислительной машины ВБ-480-01.
Передатчик ЛЧМ сигнала 2 может быть выполнен на основе генератора, работающего методом прямого цифрового синтеза, формирующего ЛЧМ сигнал с заданной крутизной, длительностью прямого и обратного хода с помощью микросхем фирмы Analog Devices. В передатчике ЛЧМ сигнал генератора прямого цифрового синтеза с помощью квадратурного балансного смесителя и гетеродина переносится на несущую частоту.
Остальные элементы широко используются в радиопромышленности, не требуют пояснения и имеются на рынке.
Работа радиовысотомера происходит в следующей последовательности.
Во время боевой работы синхронизатор 1 на первом выходе формирует импульсы синхронизации передатчика ЛЧМ сигнала 2 с периодом повторения TП и длительностью τИ, соответствующей времени обратного хода. На втором выходе синхронизатора 1 формируются импульсы, синхронизирующие такт измерения высоты, поступающие на схему вычисления высоты 11. Период такта измерений TИЗ>NTП, где N - число независимых одиночных усредняемых измерений высоты.
Передатчик ЛЧМ сигнала 2 генерирует непрерывный ЛЧМ сигнал, параметры модуляции которого постоянны от периода к периоду. ЛЧМ сигнал излучается передающей антенной 3 вертикально в сторону земной поверхности. Отраженный от земной поверхности сигнал принимается приемной антенной 7, ориентированной параллельно направлению передающей антенны. Далее сигнал усиливается малошумящим усилителем 6 и смешивается с ЛЧМ сигналом генератора ЛЧМ сигнала в смесителе 2. В результате смешения образуется сигнал биений UБ(t) с частотой:
fБ=fН(t)-fОТР(f)=(f0+kf(t))-(f0+kf(t-τ))=kfτ;
где kf=ΔfC/(TC-τИ) - крутизна девиации несущей частоты;
fН(t) - несущая частота зондирующего сигнала;
fОТР(t) - частота отраженного сигнала.
Сигнал биений UБ(t) проходит полосовой фильтр 4, амплитудно-частотная характеристика (АЧХ) которого (фиг.4) давит частотные составляющие, пролезающий и паразитные отраженные от фюзеляжа сигналы. Полезный сигнал биений в диапазоне частот от fmin до fmax соответствует рабочему диапазону высот радиовысотомера. Подъем АЧХ соответствует 12 дБ/октаву для компенсации потерь отраженного сигнала, связанных с увеличением высоты.
После полосового фильтра 4 сигнал биений оцифровывается в АЦП 8 с частотой выборки fB=2fmax. Такая частота обеспечивает получение квадратурных составляющих оцифрованного сигнала. Квадратурный сигнал поступает на вход блока БПФ 11, где получают квадратурные составляющие спектра сигнала биений.
Частотные составляющие спектра биений fk однозначно связаны с временным положением k-х временных выборок сжатого отраженного сигнала
 ;
;
где c - скорость света в свободном пространстве;
ΔfC - девиация частоты зондирующего сигнала.
Спектр биений поступает в вычислитель предварительных оценок параметров сигнала 12, где с периодом импульсов измерения TИЗ, поступающим с второго выхода синхронизатора 1, получают предварительные оценки задержки отраженного сигнала τП, дисперсии сигнала с шумом 
где 
Предварительная оценка дисперсии шума 
 ;
;
где 
Предварительная оценка τП с вычислителя предварительных оценок 12 поступает на первый вход вычислителя высоты 9 в качестве априорной, позволяющей ограничить число перебираемых им гипотез для определения истинной оценки высоты. Значения 
Дальнейшая процедура состоит в следующем. Вычислитель высоты 9 формирует гипотезу задержки сигнала высоты τk, при этом через второй выход на вход ПЛИС 10 выдается значение τk - гипотезы значения задержки положения отраженного сигнала относительно нижней границы доверительного интервала τ0 (фиг.1), 
Вычислитель функционала соответствия спектра сигнала биений гипотезе 13 в соответствии с (1) вычисляет значение матрицы взаимных дисперсий сигнала, соответствующей k-й гипотезе:
 ;
;
и по выражению (4) значение функционала соответствия:

Значения квадратур огибающей амплитуды отраженного сигнала Z приходят с выхода блока БПФ на вычислитель функционала соответствия спектра сигнала биений гипотезе 13. Расчетное значение LУ(Z/τk) для k-й гипотезы поступает на второй вход вычислителя высоты 9.
Вычислитель высоты 9 перебором гипотез τk находит гипотезу, дающую максимум функционала соответствия, соответственно задержку сигнала 
 .
.
Полученная итоговая оценка высоты выдается вычислителем высоты 9 через первый выход потребителю.
Техническим преимуществом предлагаемого способа и устройства является возможность измерения высоты летательного аппарата с повышенной точностью за счет учета корреляционных связей в каналах приема и уменьшения составляющей, связанной с шагом выборки отраженного сигнала, равным временному разрешению зондирующего сигнала.
Пользуясь сведениями, представленными в материалах заявки, предлагаемый радиовысотомер может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при навигации различных летательных аппаратов, в том числе вертолетов, на участке пилотирования и проведения монтажных работ.
ЛИТЕРАТУРА
1. Патент 4568938 "Radar altimeter nearest return tracking".
2. Патент США 7825851 "History or image based methods for altitude determination in a radar altimeter".
Приложение 1
Адаптивный алгоритм определения высоты
Принимается вектор-сигнал на выходе согласованного фильтра Z, координаты которого - независимые выборки сигнала. Выдвигается гипотеза приема отраженного сигнала с задержкой τk при известной дисперсии сигнала с шумом

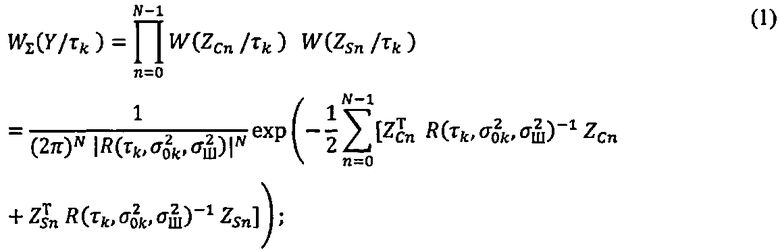
где ZCn - вектор-сигнал косинусных составляющих сигнала на выходе согласованного фильтра в n-й реализации;
ZSn - вектор-сигнал синусных составляющих сигнала на выходе согласованного фильтра в n-й реализации;
W(Z/τk) - совместная плотность вероятности соответствия выборок сигнала одиночной реализации согласованного фильтра гипотезе;
τk - задержка отраженного сигнала относительно зондирующего в k-й гипотезе;
|| - определитель матрицы.
Функционал правдоподобия L{Z/τk}, соответствующий lnW∑(Z/τk), описывается выражением:

Элемент матрицы R взаимных дисперсий выборок сигнала на выходе согласованного фильтра на задержках ti и tj при задержке отраженного сигнала τk определяется выражением:
 ;
;
где
 ;
;
 ;
;
s(t)- модуляция зондирующего сигнала;
TC - период модуляции зондирующего сигнала.
Перебором гипотез (τk) находят гипотезу, обеспечивающую максимум функционала правдоподобия L(Z/τk), соответственно оценку задержки сигнала 
Поиск максимума функционала L(Z/τk) можно заменить равноценным поиском по максимуму функционала соответствия:

ввиду того, что постоянное смещение Nln2π влияет на оценку положения максимума функционала правдоподобия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
Изобретение относится к радиолокации протяженных целей. Изобретение может быть использовано в бортовых радиовысотомерах. Достигаемый технический результат - снижение флюктуационной погрешности измерения высоты за счет учета корреляционных связей в каналах приема. Указанный результат достигается за счет излучения сигнала в сторону поверхности Земли, приема отраженных сигналов на N периодах повторения, фильтрации принятого сигнала в фильтре, согласованном с модуляцией зондирующего сигнала, нахождения на N периодах повторения огибающей мощности отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, расчета предварительных оценок высоты, дисперсии сигнала с шумом и дисперсии шума, формирования гипотез о высоте ЛА, расчета для каждой гипотезы матрицы-гипотезы взаимных дисперсий, определителя матрицы-гипотезы взаимных дисперсий и обратной матрицы-гипотезы взаимных дисперсий, расчета функционала соответствия принятого сигнала гипотезе, нахождения гипотезы, соответствующей максимуму функционала соответствия, соответственно задержки отраженного сигнала и высоты. 2 н. и 2 з.п. ф-лы, 4 ил., 1 табл., 1 прилож.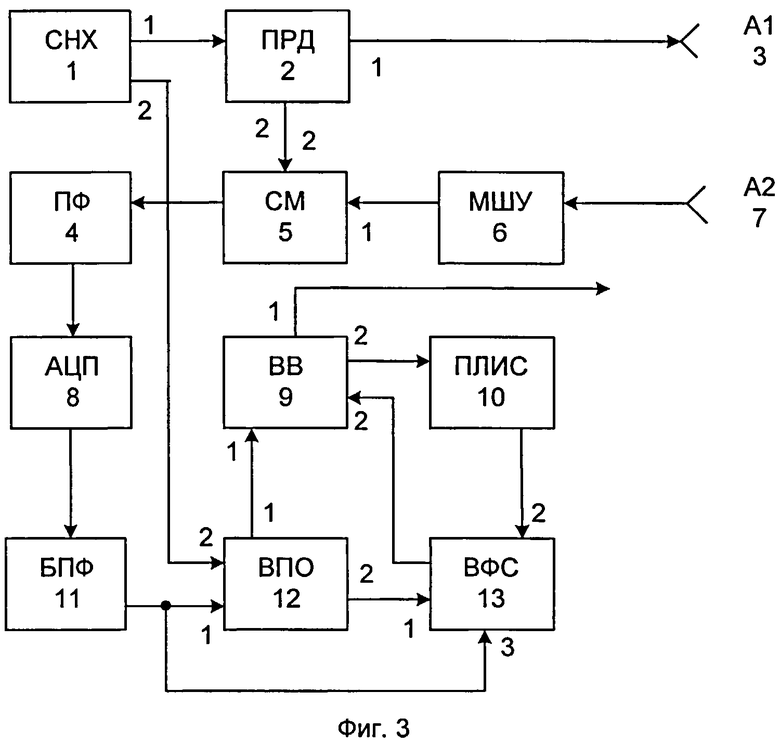
1. Способ радиолокационного измерения высоты, включающий излучение зондирующего сигнала к земной поверхности, прием отраженных сигналов на N периодах повторения, фильтрацию принятого сигнала в фильтре, согласованном с модуляцией зондирующего сигнала с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала, нахождение на N периодах повторения огибающей мощности отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, мощность сигнала в выборке считается как сумма квадратов квадратурных составляющих выборки сигнала на выходе согласованного фильтра, отличающийся тем, что находят суммарную огибающую мощности отраженного сигнала как сумму одноименных выборок огибающей мощности сигнала на N периодах повторения, находят положение первого максимума суммарной огибающей мощности отраженного сигнала τП, превышающего порог обнаружения, находят дисперсию сигнала с шумом


2. Способ радиолокационного измерения высоты по п.1, отличающийся тем, что матрицу-гипотезу взаимных дисперсий
3. Способ радиолокационного измерения высоты по п.1, отличающийся тем, что функционал соответствия LУ(Z/τK) принятого сигнала для k-й гипотезы вычисляют как отрицательную сумму трех слагаемых: первое слагаемое вычисляется как произведение числа N периодов модуляции зондирующего сигнала, используемых при наблюдении, на натуральный логарифм определителя матрицы-гипотезы взаимных дисперсий, второе слагаемое вычисляется как половинная сумма произведений транспонированного вектора косинусных составляющих принятого сигнала 

4. Радиовысотомер, содержащий последовательно соединенные синхронизатор, передатчик ЛЧМ сигнала и передающую антенну, последовательно соединенные приемную антенну, малошумящий усилитель, смеситель, полосовой фильтр, аналого-цифровой преобразователь и блок быстрого преобразования Фурье (БПФ), при этом второй выход передатчика ЛЧМ сигнала соединен с вторым входом смесителя, отличающийся тем, что введены последовательно соединенные вычислитель первичных оценок, вычислитель функционала соответствия спектра сигнала биений гипотезе, вычислитель высоты и программируемая логическая интегральная схема (ПЛИС), при этом выход ПЛИС соединен с вторым входом вычислителя функционала соответствия спектра сигнала биений гипотезе, второй выход синхронизатора соединен с вторым входом вычислителя первичных оценок, выход блока БПФ соединен с первым входом вычислителя первичных оценок и третьим входом вычислителя функционала соответствия, второй выход вычислителя первичных оценок соединен с первым входом вычислителя функционала соответствия спектра сигнала биений гипотезе, выход которого соединен с вторым входом вычислителя высоты, первый выход вычислителя высоты используется для связи с потребителем для выдачи измеренной высоты, вычислитель высоты с учетом данных предварительной оценки задержки отраженного сигнала выдает на ПЛИС гипотезу задержки отраженного сигнала, принимает оценки функционала соответствия спектра сигнала биений гипотезе и по максимуму соответствия находит гипотезу, соответствующую максимуму функционала соответствия, соответственно высоту, выдает результат измерения потребителю.

