Изобретение относится к области радионавигации, а конкретно - к приемникам сигналов спутниковых радионавигационных систем ГЛОНАСС (Россия) [1], GPS (США) [2], Galileo (ЕС) [3] и BeiDou (КНР) [4], осуществляющим одновременный прием сигналов этих систем и предназначенным для определения местоположения и синхронизации по времени.
Имитационные помехи (спуфинг, англ. spoofing) являются серьезной угрозой функционированию глобальных навигационных спутниковых систем (ГНСС) [5]. Приемники ГНСС весьма уязвимы в отношении спуфинг-атак, поскольку мощность принимаемых ГНСС сигналов чрезвычайно мала, и спецификации сигналов, предназначенных для гражданских потребителей, открыты для доступа любых лиц. Спуфинг-атаки потенциально более опасны, чем постановщики активных шумовых помех, т.к. атакуемый приемник не осознает угрозы и продолжает выдавать потребителю данные о местоположении, которые выглядят правдоподобными, хотя эти данные могут быть абсолютно ложными, т.к. получены по имитационным сигналам.
Известен ряд способов борьбы с имитационными помехами. Как указывается в [5], некоторые из них могут быть весьма эффективными, но требуют комплексирования с дополнительным дорогостоящим оборудованием, что исключает их широкое применение в аппаратуре гражданских потребителей. Например, для селекции по углу прихода необходимы несколько антенн геодезического качества и дополнительный вычислительный модуль для дифференциально-фазовых местоопределений, а для методов перекрестной проверки с данными инерциальной подсистемы, например [6], [7] требуется применение высокоточных акселерометров и гироскопов. Для реализации криптографических методов необходима модификация структуры навигационных сигналов.
Многие из способов подавления помех от переотраженных сигналов при многолучевом распространении [8]…[11] могут использоваться для борьбы с имитационными помехами, поскольку структуры имитационных и многолучевых сигналов почти полностью совпадают. Однако, для реализации метода MEDLL, описанного в [10], требуются слишком большие вычислительные ресурсы и знание количества мешающих сигналов, а в большинстве других, например [8], [9] и [11], предполагается, что мешающий сигнал запаздывает относительно истинного, что исключает возможность борьбы с имитационной помехой, опережающей истинный сигнал.
Известно решение проблемы устранения имитационных помех [12] (способ-аналог), основанное на использовании преобразования Фурье на укороченных временных интервалах сигнала (Short-Time Fourier Transform, STFT). В этом методе истинный (аутентичный) сигнал представляется в виде:

где А - амплитуда истинного сигнала, c(t) - дальномерный код, sc(t) - поднесущая ВОС-модуляции, ϕе - разность фаз между истинным сигналом и генератором, aj, τj, ϕj - относительная амплитуда, задержка имитационного сигнала и разность фаз между ним и истинным сигналом. Обработка сигнала основана на следующем представлении взаимной спектральной плотности мощности (Cross Power Spectral Density, CPSD) между входным сигналом и копией дальномерного кода:

где G0(f) - спектральная плотность мощности (power spectral density PSD) истинного сигнала, Gnoise(f) - спектральная плотность мощности шума. Таким образом, взаимная спектральная плотность мощности в (2) представлена в виде произведения двух сомножителей: первый из них является спектральной плотностью мощности истинного сигнала, а второй - характеристической функцией имитационной помехи (Spoofing Characteristic Function, SCF):

SCF - это функция, которая содержит всю информацию о параметрах имитационного сигнала, aj, τj, ϕj. Для получения информации о параметрах aj, τj, ϕj ее просто транслируют во временную область:

где F-1 представляет обратное преобразование Фурье (IFFT). Из (4) видно, что после обратного преобразования Фурье во временной области получаются два импульса, второй из которых содержит всю необходимую информацию о параметрах имитационного сигнала.
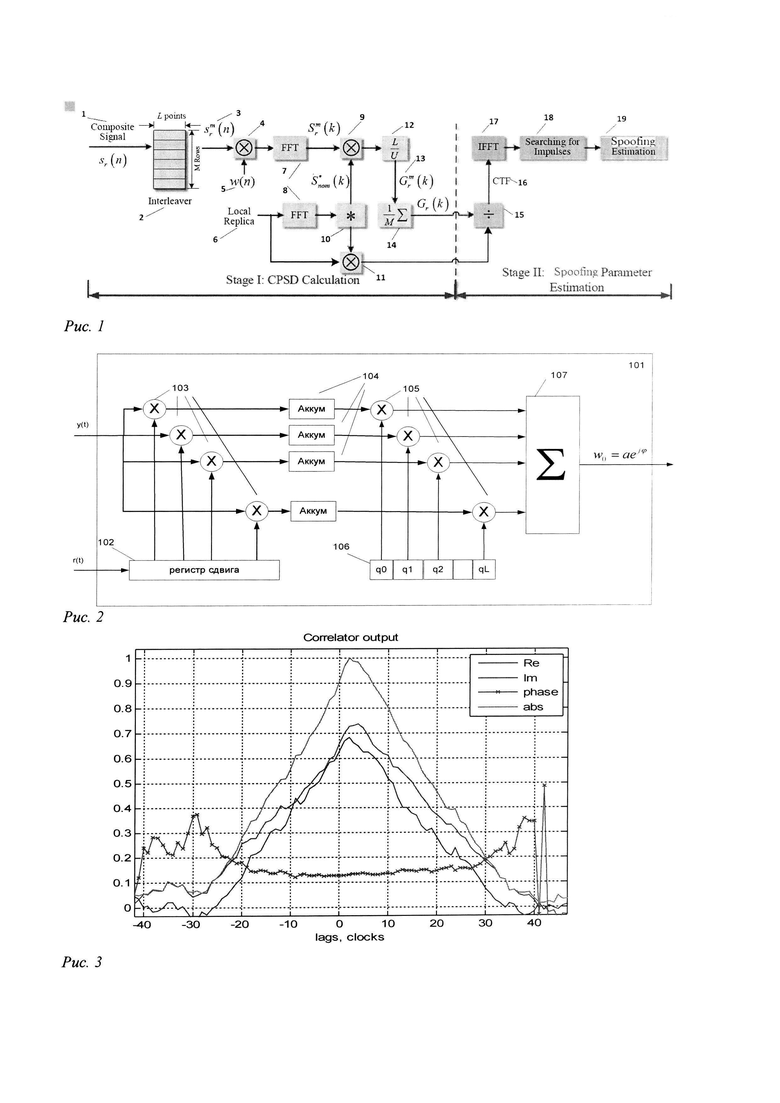
Во избежание чрезмерно большого объема вычислений и для уменьшения влияния шумов во входном сигнале в способе-аналоге (STFT) [12] используется усреднение спектральных данных, полученных на укороченных временных интервалах сигнала (Рис. 1). При этом обработка смеси sr(n) сигнала и имитационной помехи 1 осуществляется в два этапа. На первом этапе вычисляется взаимная спектральная плотность мощности (Cross Power Spectral Density, CPSD) между входным сигналом и копией дальномерного кода 6. Для этого выполняются:
 Шаг 1: Входной сигнал после переноса на нулевую частоту и дискретизации по времени поступает в блок перемежения 2 (interleaver), который представляет собой оперативное запоминающее устройство (SDRAM), при этом сигнал разделяется на М сегментов 3 srm(n), каждый длиной в L отсчетов;
Шаг 1: Входной сигнал после переноса на нулевую частоту и дискретизации по времени поступает в блок перемежения 2 (interleaver), который представляет собой оперативное запоминающее устройство (SDRAM), при этом сигнал разделяется на М сегментов 3 srm(n), каждый длиной в L отсчетов;
Шаг 2: Каждый сегмент в блоке 4 умножается на окно Хэмминга 5 для уменьшения эффектов утечки мощности и усечения;
Шаг 3: В блоке 7 выполняется БПФ каждого сегмента, в результате чего получается спектр m-го сигнала Srm(k);
Шаг 4: В блоке 9 спектр m-го сигнала Srm(k) перемножается со спектром S*nom, который получается из копии дальномерного кода 6 путем выполнения БПФ в блоке 8 и комплексного сопряжения в блоке 10, в результате чего после нормировки в блоке 12 получается взаимная спектральная плотность мощности m-го сегмента Grm(k);
Шаг 5: В блоке 14 усредняются спектральные плотности мощности сегментов, и в результате получается усредненная спектральная плотность мощности Gr(k)
На втором этапе усредненная взаимная спектральная плотность мощности Gr(k) делится в блоке 15 на спектральную плотность мощности копии дальномерного кода, полученную в блоке 11. В результате этого деления получается характеристическая функция помех SCF, над которой выполняется обратное преобразование Фурье в блоке 17, порождающее совокупность «δ-импульсов» во временной области, соответствующих положению истинного сигнала и всех имитационных сигналов на временной оси. В блоках 18 и 19 анализируются амплитуды и положения на оси времени всех имитационных сигналов, после чего имитационные сигналы могут быть удалены из петель слежения.
Недостатками способа-аналога [12] (Рис. 1) являются:
- необходимость выполнения операции поточечного деления спектральных функций (Блок 15 на Рис. 1) в реальном масштабе времени, что требует применения дополнительного программируемого процессора, либо больших ресурсов в случае аппаратной реализации, например, в программируемых логических интегральных схемах (ПЛИС);
- увеличение шумовой компоненты в (4), вызванное делением на спектральную функцию G0(f), которая может быть близка к нулю или обращаться в нуль на множестве частот ненулевой меры;
- параметры истинного и имитационного сигналов (амплитуда, фаза и задержка) считаются неизменными на интервале наблюдения (20…40 мс), что во многих случаях не выполняется, особенно при значительных отклонениях частоты задающего генератора приемника от номинального значения;
- в уравнениях (1)…(3) учитывается только один имитационный сигнал, хотя на практике их может быть несколько, и не учитываются переотраженные сигналы из-за многолучевого распространения.
Наиболее близким из известных решений является способ (прототип) [13] (Рис. 2), в котором для оценивания параметров истинных и мешающих сигналов применяется метод максимального правдоподобия [14]. Он сводится к минимизации функционала::

где:
x(t) - комплексный сигнал на выходе радиочастотной части приемника-прототипа (Рис. 2), представляющий собой аддитивную смесь прямого навигационного сигнала, отраженных сигналов и гауссова шума;
 - реплика сигнала на входе к-го подканала коррелятора;
- реплика сигнала на входе к-го подканала коррелятора;
wk, k=0, …L - неизвестные комплексные амплитуды сигналов, приходящих с задержками τk, причем w0 соответствует прямому навигационному сигналу.
Оптимальная по критерию максимального правдоподобия оценка комплексных амплитуд сигналов определяется из (5) в способе-прототипе как:

где:
ρ={ρk} - вектор комплексных выходных сигналов подканалов коррелятора,

R={Rkm} - теплицева матрица, соответствующая автокорреляционной функции дальномерного кода;

Элемент вектора w с индексом k=0 представляет комплексную амплитуду прямого навигационного сигнала. Из (6) следует формула для его вычисления:

где q - первая строка матрицы Q, т.е. qm=Q0m, m=0, …, L.
Оценка (6) является несмещенной, т.е. при отсутствии случайных шумов оценки комплексных амплитуд всех сигналов в точности равны истинным комплексным амплитудам независимо от интенсивности мешающих сигналов. Кроме того, при наличии случайных шумов информационная матрица Фишера [15] вероятностного распределения вектора ρ равна R, а с другой стороны, ковариационная матрица оценки вектора w из (6) равна R-1, т.е. совпадает с матрицей, обратной к информационной матрице Фишера. Поэтому в соответствии с [15] оценка (6) является эффективной, т.е. является наиболее точной среди всех возможных несмещенных оценок.
Устройство для реализации способа-прототипа содержит регистр весовых коэффициентов, сдвиговый регистр копии, вход которого соединен с выходом копии генератора дальномерного кода, совокупность L смесителей кода, у каждого из которых первый вход соединен с сигнальным входом устройства подавления мешающих отражений, а второй вход m-го смесителя кода соединен с m-ой ячейкой сдвигового регистра, совокупность L накапливающих сумматоров, причем вход m-го накапливающего сумматора соединен с выходом m-го смесителя кода, совокупность L перемножителей, причем первый вход m-го перемножителя соединен с выходом m-го накапливающего сумматора, а второй вход m-го перемножителя соединен с выходом m-й ячейки регистра весовых коэффициентов, и L-входовой сумматор, входы которого соединены с выходами перемножителей, а выход является выходом устройства подавления мешающих отражений.
Хотя применение способа-прототипа [13] позволяет избежать некоторых недостатков способа-аналога, в частности деления спектральных функций, использованного в (4) и связанного с этим увеличения шумовых компонентов оценок, но прототип также имеет ряд недостатков:
- амплитуды, фазы и задержки всех сигналов считаются неизменными на интервале наблюдения;
- в модели истинного сигнала r(t) в (5) не учитывается модуляция битами навигационного сообщения, в результате чего интервал наблюдения ограничен длительностью бита навигационного сообщения, например, 20 мс для GPS L1/L2c и Глонасс L1/L2, а такая малая длительность интервала наблюдения недостаточна для эффективной фильтрации шумовой компоненты оценок;
- хотя в уравнении модели измерений (5) учитываются все мешающие сигналы, но в результате в соответствии с (9) формируется оценка комплексной амплитуды только одного истинного сигнала, в то время как для надежного различения истинного и имитационных сигналов необходимы оценки всех комплексных амплитуд (6);
- в (9) оценивается комплексная амплитуда только одного сигнала, имеющего наименьшее запаздывание, поэтому способ-прототип непригоден для оценки параметров истинного сигнала, если он отстает от имитационного.
Предлагаемым изобретением решается задача оптимального оценивания параметров истинного сигнала в условиях воздействия имитационных помех, шумов и мешающих отражений в условиях, когда амплитуды, фазы и задержки всех сигналов могут меняться с течением времени на интервале наблюдения, истинный сигнал может отставать от имитационного и учитывается модуляция битами навигационного сообщения.
Для достижения этого технического результата предлагается новый способ оценивания параметров и структуры истинного и мешающих сигналов, основанный на применении метода максимального правдоподобия [14], который сводится к минимизации функционала (5), что обеспечивает возможность раздельного слежения за параметрами всех обнаруженных сигналов, сглаживание шумовых компонентов оценок параметров, выделение истинного сигнала при дальнейшей обработке на основании априорной информации, отличающей истинный сигнал от имитационных, и исключение имитационных данных из навигационного решения.
Кроме вышеупомянутого нового способа оценивания параметров истинных и мешающих сигналов, в настоящем изобретении предлагается устройство для его реализации, которое содержит постоянное запоминающее устройство (ПЗУ), адресный вход которого соединен с выходом генератора адреса, причем выход генератора адреса является адресным выходом устройства оценивания параметров истинных и мешающих сигналов, регистр весовых коэффициентов, вход которого соединен с выходом данных ПЗУ, сдвиговый регистр копии, вход которого соединен с выходом генератора дальномерного кода, совокупность М смесителей кода, у каждого из которых первый вход соединен с сигнальным входом устройства оценивания параметров истинных и мешающих сигналов, а второй вход m-го смесителя кода соединен с m-ой ячейкой регистра копии, совокупность М накапливающих сумматоров, причем вход m-го накапливающего сумматора соединен с выходом m-го смесителя кода, совокупность М перемножителей, причем первый вход m-го перемножителя соединен с выходом m-го накапливающего сумматора, а второй вход m-го перемножителя соединен с выходом m-й ячейки регистра весовых коэффициентов, и М-входовой сумматор, входы которого соединены с выходами перемножителей, а выход является выходом данных устройства оценивания параметров истинных и мешающих сигналов.
Кроме того, в настоящем изобретении предлагается приемник спутниковой навигации, в котором вышеупомянутое устройство используется для оценивания параметров истинных и мешающих сигналов, и который содержит задающий генератор, генератор временной шкалы, вход которого соединен с выходом задающего генератора, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, вход которого соединен с выходом многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит генератор несущей, смеситель несущей и генератор кода, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит систему слежения за задержкой, и систему слежения за фазой, отличающийся тем, что в каждый канал многоканального коррелятора дополнительно вводится устройство оценивания параметров истинных и мешающих сигналов и демультиплексор, адресный вход которого соединен с адресным выходом устройства оценивания параметров истинных и мешающих сигналов, причем первый вход устройства оценивания параметров является сигнальным и соединен с выходом смесителя несущей, а второй вход соединен с выходом генератора дальномерного кода, а выход его данных соединен со входом данных демультиплексора, а в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов вводится дополнительное количество подканалов для слежения за всеми обнаруженными мешающими сигналами, причем выход данных демультиплексора соединен со входами систем слежения за фазой подканалов слежения выбранного спутника, а в каждый из подканалов слежения дополнительно вводится блок селекции, первый вход которого соединен с выходом системы слежения за задержкой, второй вход соединен с выходом системы слежения за фазой, а выход блока селекции соединен со входом навигационного процессора.
На Рис. 3…6 приведен пример формирования оценок фаз истинного навигационного сигнала на фоне мешающего имитационного сигнала в следующих условиях:
 полоса пропускания радиочастотного тракта достаточно широкая по сравнению со спектром навигационного сигнала, так что автокорреляционная функция навигационного сигнала считается идеальным треугольником;
полоса пропускания радиочастотного тракта достаточно широкая по сравнению со спектром навигационного сигнала, так что автокорреляционная функция навигационного сигнала считается идеальным треугольником;
шаг панорамы по задержке = 1/31 длительности символа дальномерного кода GPS (длительности чипа GPS);
количество параллельных подканалов по задержке М=74;
• опережение мешающего сигнала относительно истинного=2/31 длительности чипа, т.е. около 60 нc;
амплитуда мешающего сигнала превышает амплитуду истинного в два раза;
фаза истинного сигнала=0.25 цикла;
фаза мешающего сигнала=1/16 цикла=20°;
отношение сигнал/шум на входе приемника 43 дБГц;
полное время сглаживания с учетом демодуляции битов навигационного сообщения=80 мс.
Действительная, мнимая компоненты, модуль и фаза комплексной аддитивной смеси истинного и имитационного сигналов на выходе коррелятора приведены на Рис. 3. На нем видны значительные искажения фазы корреляционных отсчетов (до 0.1 цикла и более). Таким образом, этот рисунок демонстрирует трудности обнаружения имитационной помехи при стандартных способах обработки сигналов в навигационном приемнике, а также большие искажения фазы истинного сигнала, что часто приводит к срыву слежения ССФ.
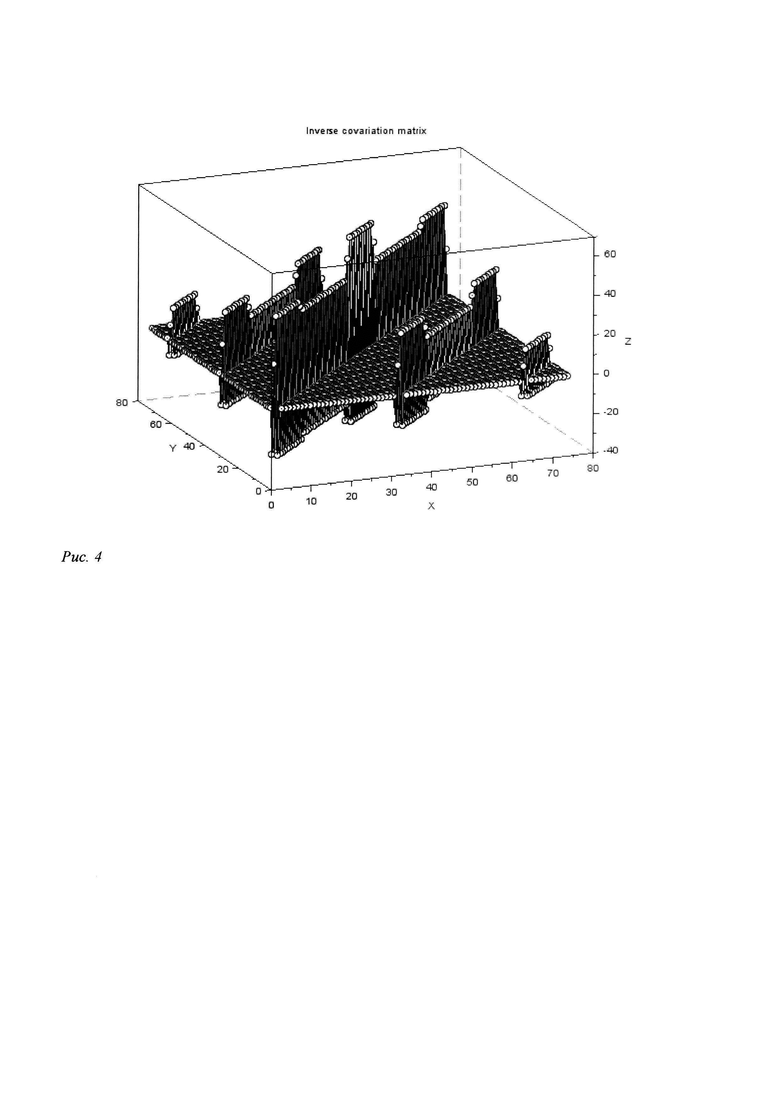
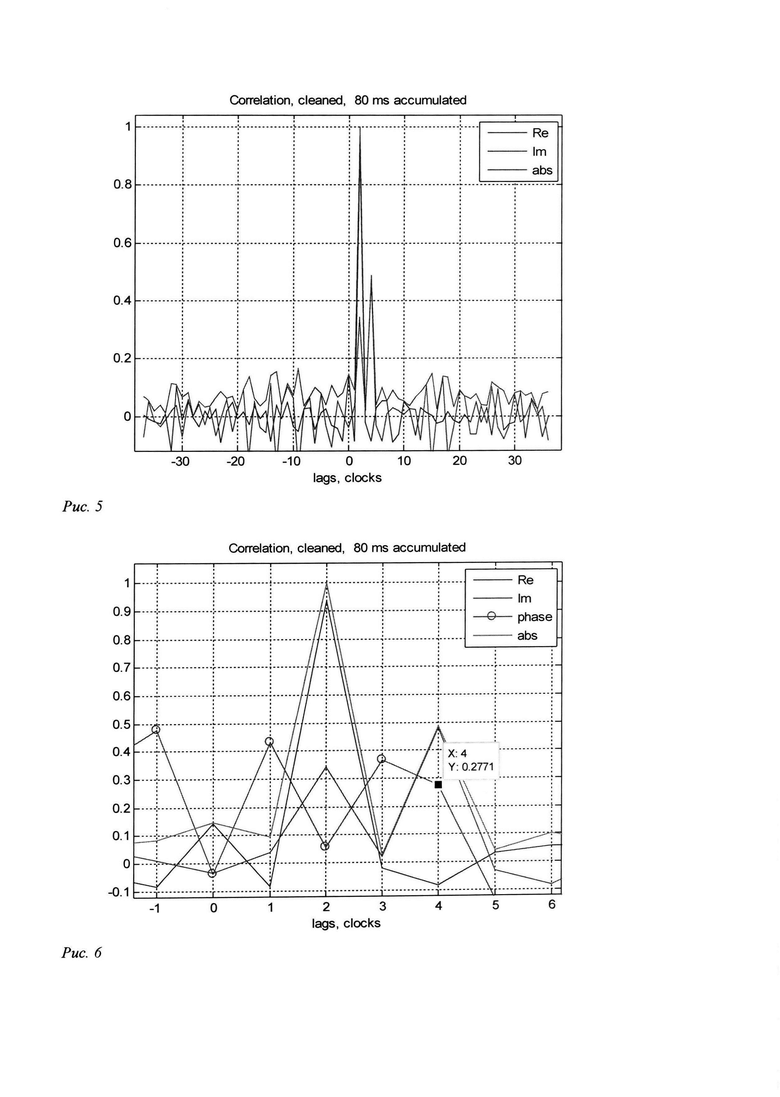
Рассчитанная по (8) матрица Q представлена на Рис. 4, а результаты расчета комплексных амплитуд по (6) представлены на Рис. 5, который демонстрирует хорошую различимость истинного и имитационного сигналов на фоне шума. На Рис. 6 те же сигналы представлены в укрупненном масштабе, откуда видна достаточно высокая точность оценки фаз как истинного (0.25 цикла), так и имитационного (0.0625 цикла) сигнала. Таким образом, устранено искажающее воздействие имитационного сигнала на оценку фазы истинного сигнала и предлагаемый способ обеспечивает точную оптимальную оценку фазы истинного сигнала, а следовательно, возможность надежного слежения за ним в условиях воздействия шумов, мешающих отражений и имитационных сигналов.
Устройство оценивания параметров истинных и мешающих сигналов, реализующее
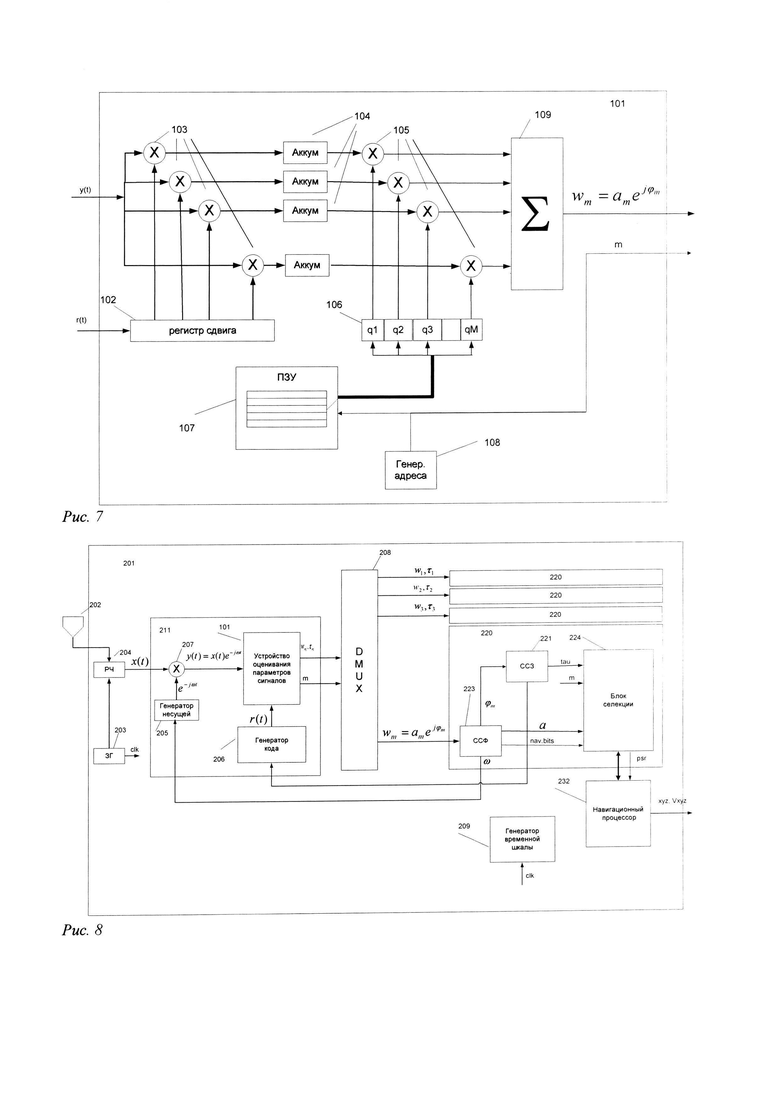
предложенный выше способ, показано на Рис. 7. Входной сигнал x(t)⋅e-jωt в М перемножителях 103 умножается на копии псевдослучайного дальномерного кода r(t-τk), k=1, …, M, получаемые на сдвиговом регистре 102 из кода r(t), соответствующего прямому навигационному сигналу. В аккумуляторах 104 формируются значения комплексных корреляционных интегралов ρk, k=1, …, М, которые в умножителях 105 умножаются на действительные коэффициенты qmk, соответствующие m-й строке матрицы Q и хранящиеся в регистре 106, а результаты перемножений qmk⋅ρk суммируются в сумматоре 109. Операции умножения и сложения в блоках 105 и 109 выполняются поочередно для каждой m-й строки матрицы Q, для чего строки матрицы Q поочередно считываются из запоминающего устройства 107 в соответствии с адресом, вырабатываемым генератором адреса 108, и записываются в регистр 106. Таким образом, максимально правдоподобные оценки комплексных амплитуд всех сигналов поочередно получаются на выходе сумматора 109 в соответствии с (6) и сопровождаются адресом m, однозначно определяющим задержку сигнала, а аргумент комплексной амплитуды на выходе сумматора 109 представляет собой оценку фазы соответствующего истинного или мешающего сигнала, «очищенную» от влияния других сигналов, присутствующих в смеси.
Предлагаемый приемник спутниковой навигации 201 с устройством обнаружения, оценки параметров и подавления имитационных помех (Рис. 8) содержит последовательно соединенные радиочастотный преобразователь 204, многоканальный коррелятор 211 (на Рис. 8 показан только один канал коррелятора, предназначенный для обработки сигналов одного спутника), демультиплексор 208, подканалы слежения 220 и навигационный процессор 232, причем работа всех составных частей синхронизируется от одного задающего генератора 203. Кроме того, в приемнике имеется генератор временной шкалы 209, выход которого используется для оцифровки моментов времени, к которым относятся сырые измерения и данные навигационных определений. Приемник работает следующим образом. Сигнал, принятый антенной 202, подается на радиочастотный блок 204, который его усиливает, фильтрует, выполняет преобразование на более низкую частоту и преобразует в цифровую форму. Все вышеуказанные операции в приемнике 201 полностью аналогичны тем, которые выполняются в приемнике-аналоге и приемнике-прототипе. Оцифрованный сигнал подвергается корреляционной обработке в многоканальном корреляторе 211.
Каждый канал многоканального коррелятора может быть настроен на частоту и код одного спутника в одном частотном диапазоне. Для этого входной дискретизированный по времени комплексный сигнал x(t) в умножителе 207 умножается на комплексный опорный сигнал e-jωt, частота которого с высокой точностью выравнена с частотой истинного навигационного сигнала данного спутника. Полученный в результате сигнал y(t)=x(t)⋅e-jωt подается в устройство обнаружения и оценки параметров истинного и мешающих сигналов 101 вместе с дальномерным кодом r(t), который вырабатывается в генераторе кода 206. Выходные комплексные сигналы блока 101, "очищенные" от искажений, вызванных наложением мешающих компонент на истинный сигнал и друг на друга, поступают на демультиплексор 208, который направляет их в соответствующий подканал слежения 220.
В каждом подканале слежения входной комплексный отсчет wm передается в систему слежения за фазой (ССФ) 223, вырабатывающую сглаженные оценки амплитуды а, фазы ϕ, частоты ω и биты навигационного сообщения, причем сглаженная оценка полной фазы ϕ используется обычным образом в системе слежения за задержкой (ССЗ) 221. В блоке 220, соответствующем истинному сигналу, сглаженная частота со используется обычным образом для управления генератором несущей 205, обеспечивая замкнутую обратную связь петли слежения за фазой несущей, а сглаженная задержка управляет генератором кода 206, обеспечивая замкнутую обратную связь петли слежения за задержкой. Таким образом, благодаря введению дополнительного количества подканалов слежения, в приемнике обеспечивается раздельное слежение за задержкой и фазой каждого из сигналов смеси, их сглаживание и выделение битов навигационного сообщения, с учетом которых увеличивается интервал сглаживания фазы, частоты и задержки, как это делается в обычных ССФ и ССЗ. В блоке селекции сглаженные значения параметров и навигационные биты обычным образом используются для формирования сырых измерений псевдодальности и амплитуды, которые проверяются на соответствие априорной информации, полученной от навигационного процессора 232. Априорная информация может быть получена в результате обработки сигналов и данных до момента обнаружения имитационной помехи, либо сообщена пользователем. Если ни в одном блоке селекции данного канала сырые измерения не подтверждаются априорной информацией, в навигационном процессоре 232 принимается решение об отсутствии достоверных измерений. Если сырые измерения более чем в одном блоке селекции данного канала соответствуют априорной информации, в навигационном процессоре эти измерения считаются недостоверными из-за имитационной помехи. Если только в одном блоке селекции данного канала сырые измерения подтверждаются априорной информацией, то по этим данным в навигационном процессоре 232 осуществляется решение навигационной задачи и передача потребителю сообщений, содержащих координаты, компоненты вектора скорости навигационных определений и сырые измерения псевдодальностей и псевдодопплеровских фаз.
Заявляемый приемник и устройство обнаружения, оценки параметров и подавления имитационных помех состоят из функциональных блоков, устройство которых широко известно в области спутниковой навигации. Например, различные методы реализации радиочастотного преобразователя 204 описаны в [16], [17] и [18], в заявляемом приемнике может быть использована любая из микросхем, описанных в [17]. Устройства ССЗ 221 и ССФ 223 также хорошо известны из [16]. Принципы формирования измерений псевдодальности известны из [19]. В качестве навигационного процессора 232 могут быть использованы, например, различные микропроцессорные ядра, разработанные компанией ARM Limited. В качестве задающего генератора 203 может быть использована любая из выпускаемых различными компаниями микросхем ТСХО или кварцевых генераторов, в качестве генератора временной шкалы 231 - любые из выпускаемых электронной промышленностью микросхем двоичных счетчиков.
Предлагаемый приемник спутниковой навигации с устройством обнаружения, оценки параметров и подавления имитационных помех обеспечивает решение технической задачи исключения ошибок измерений фазы и задержки навигационных сигналов, которые вызваны имитационными и отраженными сигналами, без затрат времени и ресурсов на выполнение итерационных процессов, с возможностью увеличения интервала сглаживания до нескольких десятков миллисекунд с учетом модуляции навигационными битами и с учетом изменения измеряемых параметров на интервале сглаживания.
На Рис. 1 представлена функциональная схема способа-аналога.
На Рис. 2 представлена функциональная схема способа-прототипа.
На Рис. 3 представлены пример смеси прямого и отраженного сигналов на выходе коррелятора, действительная часть, мнимая часть, фаза и модуль.
На Рис. 4 представлена матрица R-1 рассматриваемого примера.
На Рис. 5 представлены результаты расчета оценок модуля и аргумента комплексных амплитуд истинного и имитационного сигналов.
На Рис. 6 представлены те же результаты, что на Рис. 5, но в укрупненном масштабе для иллюстрации точности измерений фазы и задержки.
На Рис. 7 представлена функциональная схема заявляемого устройства оценивания параметров истинных и мешающих сигналов.
На Рис. 8 представлена функциональная схема заявляемого приемника спутниковой навигации с устройством обнаружения, оценки параметров и подавления имитационных помех.
Источники информации:
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ (редакция 5.1). РНИИКП 2008"
2. Interface Specification IS-GPS-200, rev.H, 2013.
3. Galileo Open Service Signal In Space Interface Control Document, issue 1.1, Sept.2010.
4. BDS-SIS-ICD-B1I-1.0,Dec.2012.
5. Humphreys Т.Е., et. al. Assessing the Spoofing Threat: Development of a Portable GPS Civilian Spoofer. Proceedings of ION GNSS-2008, Savanna, September 16-19, 2008
6. HungCuongX. К Дао, Д.Д. Ступин, Р.А. Шевченко. Принципы обнаружения преднамеренных помех, воздействующих на аппаратуру потребителей спутниковых радионавигационных систем. Журнал радиоэлектроники [электронный журнал]. 2019. №5. Режим доступа: http://jre.cplire.ru/jre/may19/14/text.pdfDOI 10.30898/1684-1719.2019.5.14
7. Затучный Д.А. Способ обнаружения воздушным судном внешней имитационной помехи, вносящей ошибку в определение его местоположения. Патент РФ №2708679 С1, 16.04.2019.
8. Garin L., Van Diggelen F. and Rousseau J.M. "Strobe and Edge Correlator Multipath Mitigation for Code", proceedings of ION GPS-96, Kansas City, September 17-20.
9. Garin L. and Rousseau J.M. Enhanced Strobe Correlator, Proceedings of ION GPS-97, Kansas City, September 16-19.
10. Townsend, В., et al, (1995) "Performance evaluation of the multipath estimating delay lock loop," Navigation: Journal of the Institute of Navigation, vol 42, no 3, Fall, pp. 503-514.
11. Fenton P.C, Apparatus for and Method of Making Pulse-Shape measurements. US Pat. No. 8,467,433 B2, Jun. 18, 2013.
12. Hanchuan Jiang, Chao Sun, Hongbo Zhao, Wenquan Feng. STFT-based Method Applied to GNSS Spoofing Estimation, Mitigation and Discrimination from Multipath. ION GNSS+2019, Miami, Florida, September 16-20, 2019
13. Фридман A.E. Способ оценивания фазы навигационного сигнала на фоне мешающих отражений многолучевого распространения и навигационный приемник с устройством подавления мешающих отражений при оценке фазы. Патент РФ №2625804 С1, 07.06.2016
14. Б.Р.Левин. Теоретические основы статистической радиотехники. М., Сов. радио, 1968.
15. М. Кендалл, А. Стьюарт. Статистические выводы и связи. М., "Наука", 1973.
16. Van Dierendonck, A.J., "GPS Receivers," in: Global Positioning System: Theory and Applications, Vol I, Parkinson, B.W. and Spilker, J.J. Jr., eds., American Institute of Aeronautics and Astronautics, Washington, 1996, pp. 329-407.
17. D.K. Shaeffer, T.H. Lee. The Design and Implementation of Low-Power CMOS Radio Receivers. Kluwer Academic Publishers, Boston/Dordrecht/London, 1999.
18. Raymond A. Eastwood "An Integrated GPS/Glonass receiver". - "Navigation" (USA), 1990, 2, - pp. 141-151.
19. Поваляев A.A. Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат.- М.: Радиотехника, 2008.
Изобретение относится к радионавигации, конкретно к приемникам сигналов спутниковых радионавигационных систем, предназначенным для использования в системах позиционирования в условиях воздействия имитационных помех. Техническим результатом является устранение ошибок оценок запаздывания и фазы истинного навигационного сигнала, вызванных имитационными и другими мешающими сигналами. Заявленный способ основан на методе максимального правдоподобия. Комплексные амплитуды wm истинного, имитационных и отраженных сигналов формируются как взвешенные с весами qmk суммы корреляций ρk комплексного входного сигнала с совокупностью копий дальномерного кода r(t-τk), k=1, …, М, перекрывающих область возможных смещений имитационных сигналов относительно истинного навигационного сигнала. Комплексные амплитуды wm и их смещения τm на оси задержек используют для проверки на соответствие априорной информации: не соответствующие амплитуды wm считают имитационными или отраженными сигналами и отбрасывают, а сохраняют только неискаженный навигационный сигнал, соответствующий априорной информации. Приемник содержит задающий генератор, радиочастотный преобразователь, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов, генератор временной шкалы приемника и навигационный процессор. Каждый канал цифрового коррелятора содержит устройство оценивания параметров истинного и нескольких мешающих сигналов, а каждый канал цифровой обработки корреляционных отсчетов содержит несколько подканалов слежения по числу обнаруженных сигналов на выходе корреляционного канала выбранного спутника. 2 н. и 1 з.п. ф-лы, 8 ил.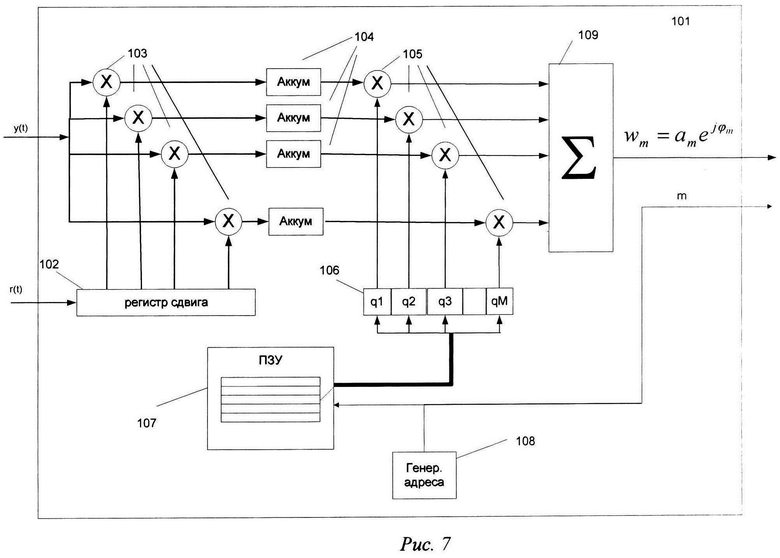
1. Способ обнаружения, оценки параметров и подавления имитационных помех, основанный на методе максимального правдоподобия (МП) таким образом, что комплексные амплитуды wm истинного, имитационных и отраженных сигналов формируются как взвешенные с весами qmk суммы корреляций ρk комплексного входного сигнала с совокупностью копий дальномерного кода r(t-τk), k=1, …, М, перекрывающих область возможных смещений имитационных сигналов относительно истинного навигационного сигнала, т.е. вектор комплексных амплитуд w=Q⋅p, где матрица Q предварительно вычисляется как Q=R-1, где R={Rkm} - теплицева матрица, соответствующая автокорреляционной функции дальномерного кода, взятой в точках {τк}, причем комплексные амплитуды wm и их смещения τm на оси задержек могут использоваться для проверки на соответствие априорной информации так, что не соответствующие амплитуды wm считаются имитационными или отраженными сигналами и отбрасываются, а сохраняется только истинный неискаженный навигационный сигнал, соответствующий априорной информации.
2. Приемник спутниковой навигации с устройством обнаружения, оценки параметров и подавления имитационных помех, содержащий задающий генератор, генератор временной шкалы, вход которого соединен с выходом задающего генератора, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, вход которого соединен с выходом многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит генератор несущей, смеситель несущей и генератор кода, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит систему слежения за задержкой и систему слежения за фазой, отличающийся тем, что в каждый канал многоканального коррелятора дополнительно вводится устройство обнаружения и оценки параметров имитационных сигналов и демультиплексор, причем первый вход устройства обнаружения и оценки параметров имитационных сигналов является сигнальным и соединен с выходом смесителя несущей, второй вход соединен с выходом генератора дальномерного кода, а выход его данных соединен с входом данных демультиплексора, и в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов вводится дополнительное количество подканалов для слежения за всеми обнаруженными мешающими сигналами, причем выход данных демультиплексора соединен с входами систем слежения за фазой подканалов слежения, а в каждый подканал слежения дополнительно вводится блок селекции, первый вход которого соединен с выходом системы слежения за задержкой, второй вход соединен с выходом системы слежения за фазой, а выход блока селекции соединен с входом навигационного процессора.
3. Приемник по п. 2, в котором устройство обнаружения и оценки параметров имитационных помех содержит постоянное запоминающее устройство (ПЗУ), адресный вход которого соединен с выходом генератора адреса, причем выход генератора адреса является адресным выходом устройства оценивания параметров истинных и мешающих сигналов, регистр весовых коэффициентов, вход которого соединен с выходом данных ПЗУ, сдвиговый регистр копии, вход которого соединен с выходом генератора дальномерного кода, совокупность М смесителей кода, у каждого из которых первый вход соединен с сигнальным входом устройства оценивания параметров истинных и мешающих сигналов, а второй вход m-го смесителя кода соединен с m-й ячейкой регистра копии, совокупность М накапливающих сумматоров, причем вход m-го накапливающего сумматора соединен с выходом m-го смесителя кода, совокупность М перемножителей, причем первый вход m-го перемножителя соединен с выходом m-го накапливающего сумматора, а второй вход m-го перемножителя соединен с выходом m-й ячейки регистра весовых коэффициентов, и М-входовой сумматор, входы которого соединены с выходами перемножителей, а выход является выходом данных устройства оценивания параметров истинных и мешающих сигналов.

