Изобретение относится к области радионавигации, а конкретно к приемникам сигналов спутниковых радионавигационных систем ГЛОНАСС (Россия) [1], GPS (США) [2], Galileo (ЕС) [3] и BeiDou (КНР) [4], осуществляющим одновременный прием сигналов этих систем и предназначенным для применения в прецизионных дифференциально-фазовых системах [5] определения местоположения.
Известно решение проблемы приема навигационных сигналов в условиях многолучевости, т.е. при мешающем воздействии отраженных сигналов. Это решение основано на выделении переднего фронта прямого сигнала с использованием узких стробов дискриминатора. В настоящее время разработаны различные модификации этого метода, такие, как описанные в [6]…[9]. Недостатком, общим для этих решений, является тот факт, что, хотя они и обеспечивают повышение точности измерений псевдодальности, но неэффективны при измерениях фазы несущей, в то время как искажение фазы несущей навигационного сигнала в условиях многолучевого распространения является главным источником ошибок в прецизионных дифференциально-фазовых системах позиционирования [10].
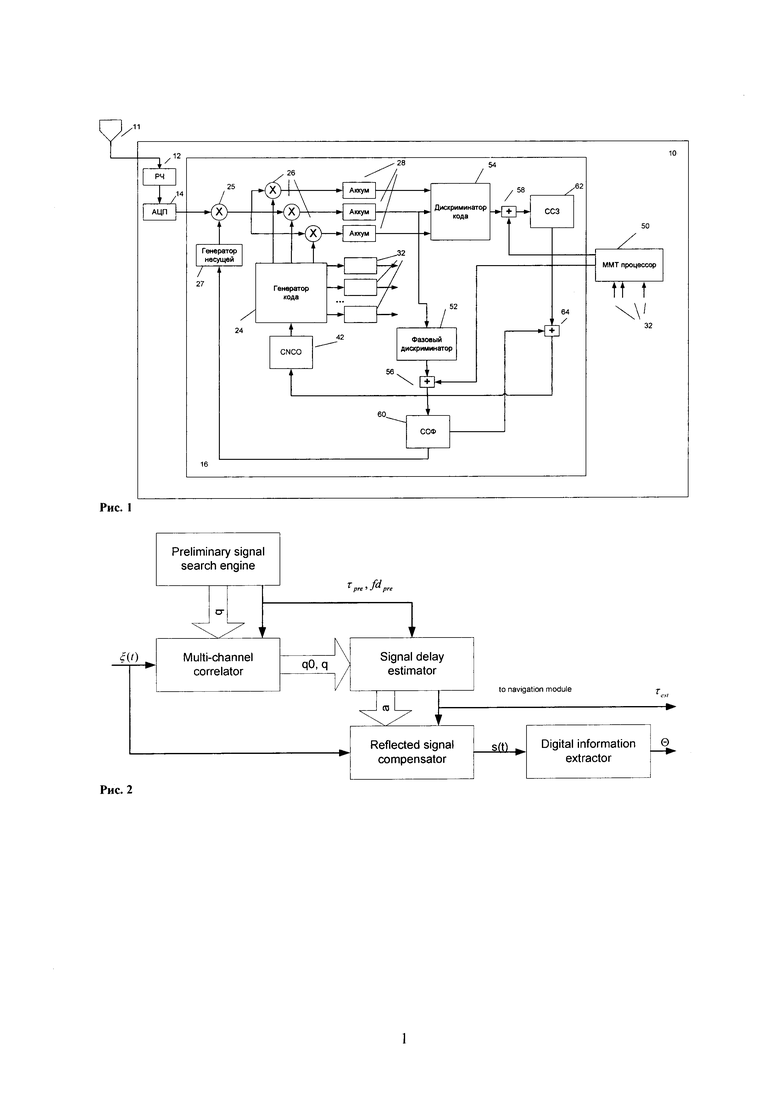
Например, известен приемник [9], содержащий последовательно соединенные радиочастотный преобразователь, дискретизатор, многоканальный коррелятор и микропроцессор. На Рис. 1 представлена упрощенная функциональная схема навигационного приемника-аналога 10, на которой отражены только основные существенные функциональные блоки. Сигнал, принятый антенной 11, подается на радиочастотный преобразователь 12, который его усиливает, фильтрует и выполняет преобразование на более низкие частоты.
Радиочастотный преобразователь 12 имеет несколько радиочастотных трактов и, соответственно, несколько выходов, каждый из которых соответствует определенной навигационной системе и определенному частотному диапазону. Выход каждого радиочастотного тракта преобразуется в цифровую форму в соответствующем аналого-цифровом преобразователе (АЦП) 14 (на Рис. 1 показан только один АЦП) и подается на вход многоканального коррелятора 16 (на Рис. 1 показан только один канал).
Каждый канал корреляционной обработки содержит миксер 25, перемножители 26, генератор несущей частоты 22, генератор кода 24 и аккумуляторы 28. Миксер 25 умножает комплексный входной сигнал на комплексно сопряженный сигнал опорной частоты, поступающий от генератора несущей частоты 22. Перемножители 26 умножают сигнал на три копии псевдослучайного кода Early, Punctual, Late (E-P-L), соответствующие выбранному спутнику и сдвинутые по задержке на некоторую величину друг относительно друга. Копии псевдослучайного кода вырабатываются генератором кода 24. Выходы перемножителей 26 интегрируются в аккумуляторах 28. Прямой (Punctual) выход аккумулятора 28 (I,Q)P подается на вход фазового дискриминатора 52, а в дискриминаторе кода 54 вырабатывается сигнал, зависящий от рассогласования фазы кода сигнала и фазы кода копии Punctual.
Выход фазового дискриминатора 52 обрабатывается в фильтре Системы Слежения за Фазой (ССФ, PLL) 60, а выход кодового дискриминатора 54 обрабатывается в фильтре Системы Слежения за Задержкой (ССЗ, DLL) 62. Полная фаза на выходе ССФ используется в ССЗ для повышения точности и надежности слежения за задержкой.
Система подавления отраженных сигналов включает в себя совокупность регистров-аккумуляторов 32 и процессор подавления многолучевости 50 (Multipath Mitigation Technique, ММТ). В регистрах-аккумуляторах 32 производится накопление комплексного сигнала с выхода перемножителя Early 28 в стробах, сформированных генератором кода 24 и привязанных к различным фазам символа кода. Процессор ММТ 50 анализирует сигналы, накопленные в регистрах-аккумуляторах 32, выделяя скачки уровней синфазной и квадратурной компонент, соответствующие фронтам отраженных сигналов. По вычисленным значениям амплитуд и фаз отраженных сигналов процессор ММТ рассчитывает поправки к измерениям задержки и фазы несущей, которые он вводит в петли слежения за задержкой и фазой с помощью сумматоров 58 и 56 соответственно.
Недостатками приемника-аналога [9] (Рис. 1) являются:
- отсутствие средств формирования сырых измерений фазы, пригодных для использования в дифференциально-фазовых системах, в том числе, нет точного определения момента оцифровки фаз;
- оценка фазы, основанная на использовании только части сигнала, попадающей в строб, т.е. содержащейся в малой части символа кода, характеризуется повышенной случайной ошибкой по сравнению с устройствами, использующими полный сигнал, содержащийся в целом символе кода;
- вследствие ограниченности полосы пропускания радиочастотного тракта, фронты прямого и отраженных сигналов не являются идеально крутыми, что также приводит к увеличению случайных ошибок оценки фазы.
Наиболее близким из известных решений является способ (прототип) [11] (Рис. 2), в котором осуществляется формирование вектора корреляций входного сигнала с совокупностью опорных передаваемых сигналов, перекрывающих область возможных моментов появления прямого и отраженного сигналов. Подавление отраженных сигналов осуществляется путем вычитания копий отраженных сигналов из входной смеси, а получение этих копий основано на совместной оценке совокупности случайных параметров всего входного сигнала, представляемого в виде

Здесь А - комплексная амплитуда прямого сигнала,
τ - момент прихода сигнала (задержка прямого сигнала),
αi - комплексные амплитуды отдельных составляющих отраженного сигнала, имеющих задержки i⋅Δ, причем Δ - минимально различимая задержка между составляющими, принимаемая равной периоду дискретизации сигнала;
n(t) - внутренний шум приемника.
Согласно синтезу оптимального алгоритма наилучшая среднеквадратичная оценка вектора α, составленного из весов отраженных сигналов αi i=1…L, получаемая для каждого значения τ из диапазона неопределенности при фиксированном значении А, равна

где К - матрица коэффициентов размером L×L, определяемая формой сигнала, уровнем внутренних шумов и априорной информацией о величине комплексных амплитуд прямого и отраженного сигналов,
qτ - вектор длиной L, содержащий отсчеты сигнала на выходе коррелятора, вычисленные для соответствующих значений задержки сигнала τ+Δ, …, τ+L⋅Δ.
Таким образом, вектор комплексных амплитуд отраженных сигналов в [11] получают в виде линейной комбинации L последовательных по задержке выходов коррелятора, а алгоритм оценки задержки сигнала сводят к поиску максимума функционала

где q0 - отсчет сигнала на выходе коррелятора для задержки τ,
а - вектор длиной L, учитывающий взаимную корреляцию прямого и отраженных сигналов с задержками Δ, …, L⋅Δ относительно прямого,
К0 - весовой коэффициент.
Недостатками прототипа являются:
- для расчета матрицы К и оценки отраженных сигналов по формуле (2), а далее для оценки задержки прямого сигнала по формуле (3) необходима априорная информация о величине комплексных амплитуд прямого и отраженного сигналов;
- для вычисления вектора а и далее для оценки задержки прямого сигнала по формуле (3) необходима априорная информация о взаимной корреляции прямого и отраженных сигналов;
- поиск максимума функционала (3) осуществляется с помощью итерационных процедур, которые связаны с большими затратами времени и вычислительных ресурсов;
- в алгоритме Рис. 2 отсутствует формирование сырых измерений фазы прямого сигнала, что требуется для дифференциально-фазовых измерений местоположения.
Предлагаемым изобретением решается задача оптимального неитерационного оценивания фазы прямого сигнала и формирования сырых фазовых измерений, необходимых для дифференциально-фазовых систем определения местоположения в условиях воздействия шумов и мешающих отражений без необходимости априорной информации о величине комплексных амплитуд прямого и отраженного сигналов и о их взаимной корреляции. Для достижения этого технического результата предлагается новый способ оценивания фазы навигационного сигнала, основанный на применении метода максимального правдоподобия [12], который сводится к минимизации функционала:

где x(t) - комплексный сигнал на выходе радиочастотной части предлагаемого приемника (Рис. 3), представляющий собой аддитивную смесь прямого навигационного сигнала, отраженных сигналов и гауссова шума;
r(t-τk)⋅ej(ωt+ϕ) - реплика сигнала на входе к-го подканала коррелятора;
wk, k=0,…L - неизвестные комплексные амплитуды сигналов, приходящих с задержками τk, причем w0 соответствует прямому навигационному сигналу.
Кроме вышеупомянутого нового способа, в настоящем изобретении предлагается устройство для его реализации, которое содержит регистр весовых коэффициентов, сдвиговый регистр копии, вход которого соединен с выходом опережающей копии генератора дальномерного кода, совокупность М смесителей кода, у каждого из которых первый вход соединен с сигнальным входом устройства подавления мешающих отражений, а второй вход m-го смесителя кода соединен с m-й ячейкой сдвигового регистра, совокупность М накапливающих сумматоров, причем вход m-го накапливающего сумматора соединен с выходом m-го смесителя кода, совокупность М перемножителей, причем первый вход m-го перемножителя соединен с выходом m-го накапливающего сумматора, а второй вход m-го перемножителя соединен с выходом m-й ячейки регистра весовых коэффициентов, и М-входовой сумматор, входы которого соединены с выходами перемножителей, а выход является выходом устройства подавления мешающих отражений при оценке фазы.
Кроме того, в настоящем изобретении предлагается приемник спутниковой навигации, в котором вышеупомянутое устройство используется для оценивания фазы с подавлением мешающих отражений многолучевого распространения, и который содержит задающий генератор, генератор временной шкалы, вход которого соединен с выходом задающего генератора, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, вход которого соединен с выходом многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит систему слежения за задержкой, фазовый дискриминатор и систему слежения за фазой, отличающийся тем, что в каждый канал многоканального коррелятора дополнительно вводится устройство подавления мешающих отражений при оценке фазы, первый вход которого является сигнальным и соединен с выходом смесителя несущей, второй вход соединен с выходом опережающей копии генератора дальномерного кода, и выход соединен с входом фазового дискриминатора многоканального устройства цифровой обработки корреляционных отсчетов, а в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов дополнительно вводится модуль формирования фазовых измерений, первый вход которого соединен с фазовым выходом системы слежения за фазой, второй вход соединен с выходом частоты системы слежения за фазой, третий вход соединен с выходом оцифровки времени системы слежения за фазой, четвертый вход соединен с выходом генератора временной шкалы приемника, а выход соединен с входом навигационного процессора.
В предлагаемом способе функционал (4) представляется в виде:

где:


Условие минимума функционала (5):

Уравнение (8) представляется в виде:

где:
R={Rkm} - теплицева матрица, соответствующая автокорреляционной функции дальномерного кода;
w={wk} - вектор неизвестных комплексных амплитуд сигналов;
ρ={ρk} - вектор комплексных выходных сигналов подканалов коррелятора, причем его среднее значение равно R⋅w.
Оптимальная по критерию максимального правдоподобия оценка комплексных амплитуд сигналов определяется из (9) как:

где 
Элемент вектора w с индексом k=0 представляет комплексную амплитуду прямого навигационного сигнала. Из (10) следует формула для его вычисления:

где q - первая строка матрицы Q, т.е. qm=Q0m, m=0, …, L.
Аргумент ϕ комплексного значения w0=r⋅еjϕ, вычисленного по (12), является значением фазы прямого навигационного сигнала, которое требовалось определить. Предлагаемый способ формирования оценки комплексной амплитуды (12) не требует априорных сведений о величине комплексных амплитуд прямого и отраженных сигналов и о их взаимной корреляции. Предлагаемый способ не требует каких-либо итераций для формирования оценки комплексных амплитуд сигналов. Оценки (10), (12) являются несмещенными, т.е. при отсутствии случайных шумов оценка прямого сигнала (12) в точности равна истинной комплексной амплитуде прямого сигнала независимо от интенсивности отраженных сигналов. Кроме того, при наличии случайных шумов информационная матрица Фишера [13] вероятностного распределения вектора ρ с параметром w равна I=R, как это следует из (7), следовательно, как известно из [13], нижняя граница дисперсии оценки параметра w0 равна  , т.е. равна
, т.е. равна  . С другой стороны, ковариационная матрица оценки вектора w из (10) равна R-1, т.е. оценка (10) имеет минимальную дисперсию среди несмещенных оценок, т.е. является наиболее точной среди всех возможных оценок.
. С другой стороны, ковариационная матрица оценки вектора w из (10) равна R-1, т.е. оценка (10) имеет минимальную дисперсию среди несмещенных оценок, т.е. является наиболее точной среди всех возможных оценок.
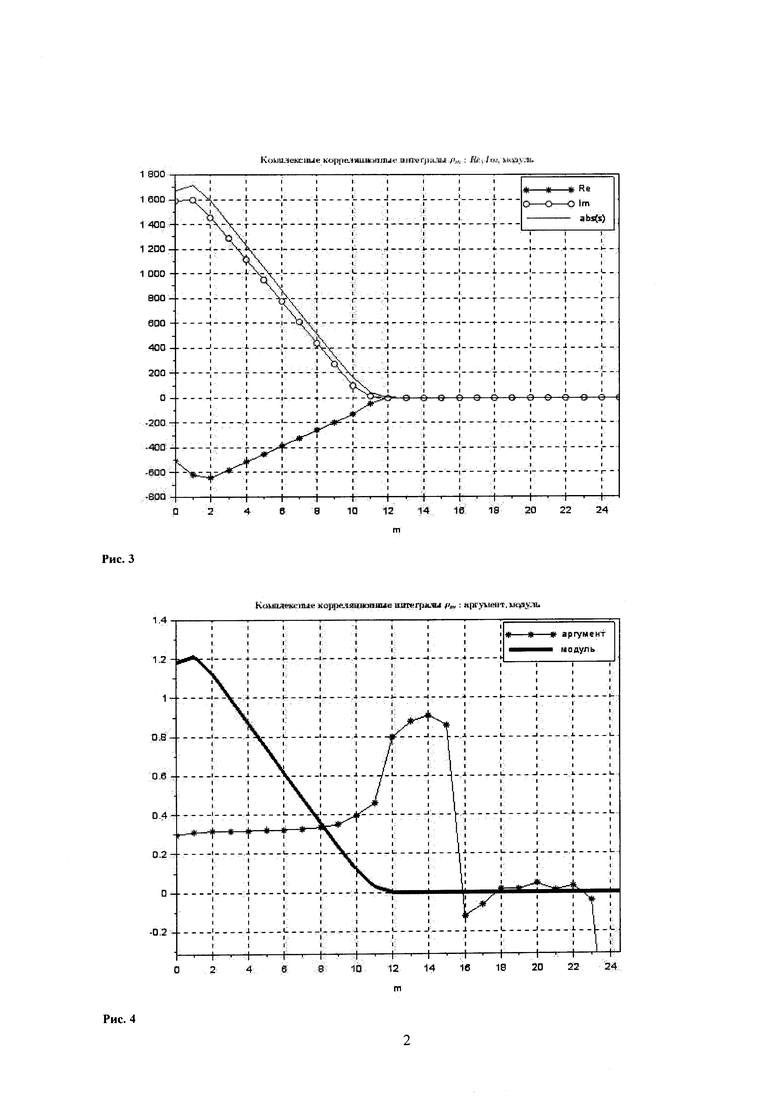
На Рис. 3…7 приведен пример формирования оценки фазы прямого навигационного сигнала на фоне мешающего отраженного сигнала в следующих условиях:
- полоса пропускания радиочастотного тракта достаточно широкая по сравнению со спектром навигационного сигнала, так что автокорреляционная функция навигационного сигнала считается идеальным треугольником;
- шаг панорамы по задержке =0.1 длительности символа дальномерного кода GPS (длительности чипа GPS);
- количество параллельных подканалов по задержке L+1=26;
- задержка отраженного сигнала относительно прямого =0.1 длительности чипа;
- амплитуда отраженного сигнала =0.8 амплитуды прямого;
- фаза прямого сигнала =0.2 цикла =72°;
- фаза отраженного сигнала =0.45 цикла =162°.
В этом примере шумы на входе приемника не учитываются, чтобы сделать более ясным воздействие мешающего отраженного сигнала.
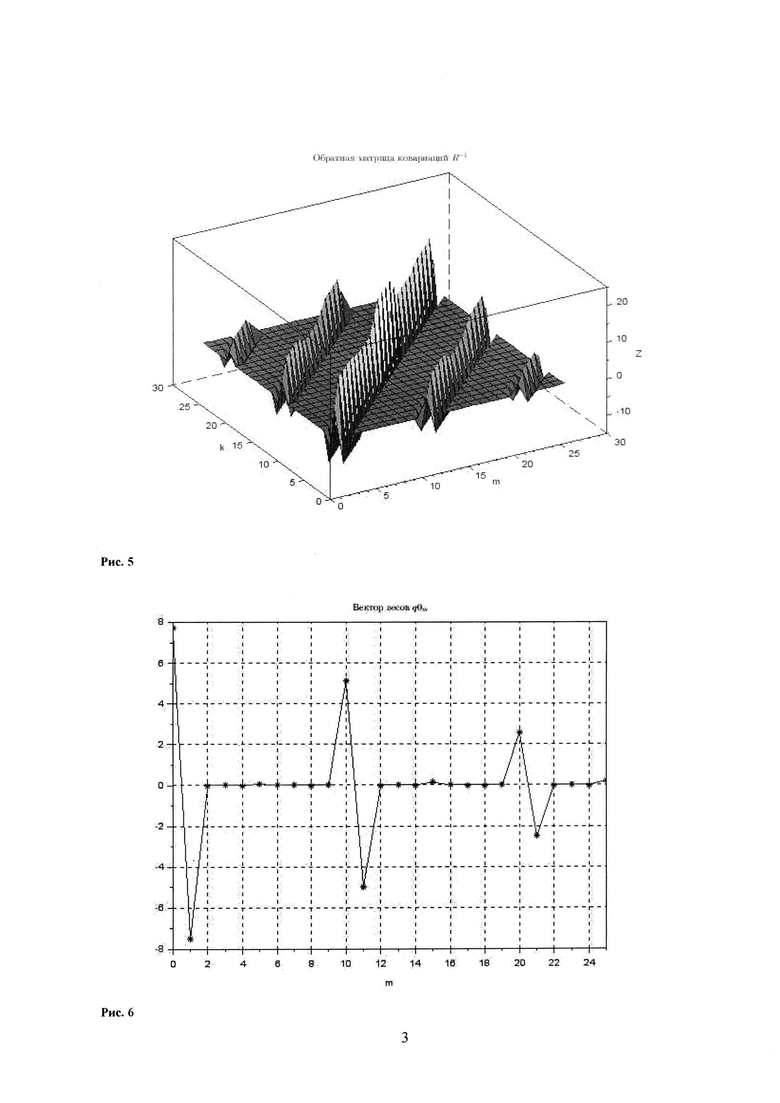
Действительная и мнимая компоненты смеси прямого и отраженного сигналов на выходе коррелятора, а также модуль комплексного сигнала на выходе коррелятора приведены на Рис. 3, а на Рис. 4 приведен тот же комплексный сигнал в виде модуля и фазы, на нем видны значительные искажения фаза корреляционных отсчетов (до 0.1 цикла и более). На Рис. 5 приведена матрица Q, рассчитанная по (11), а на Рис. 6 - ее первая строка q, которая используется в (12).
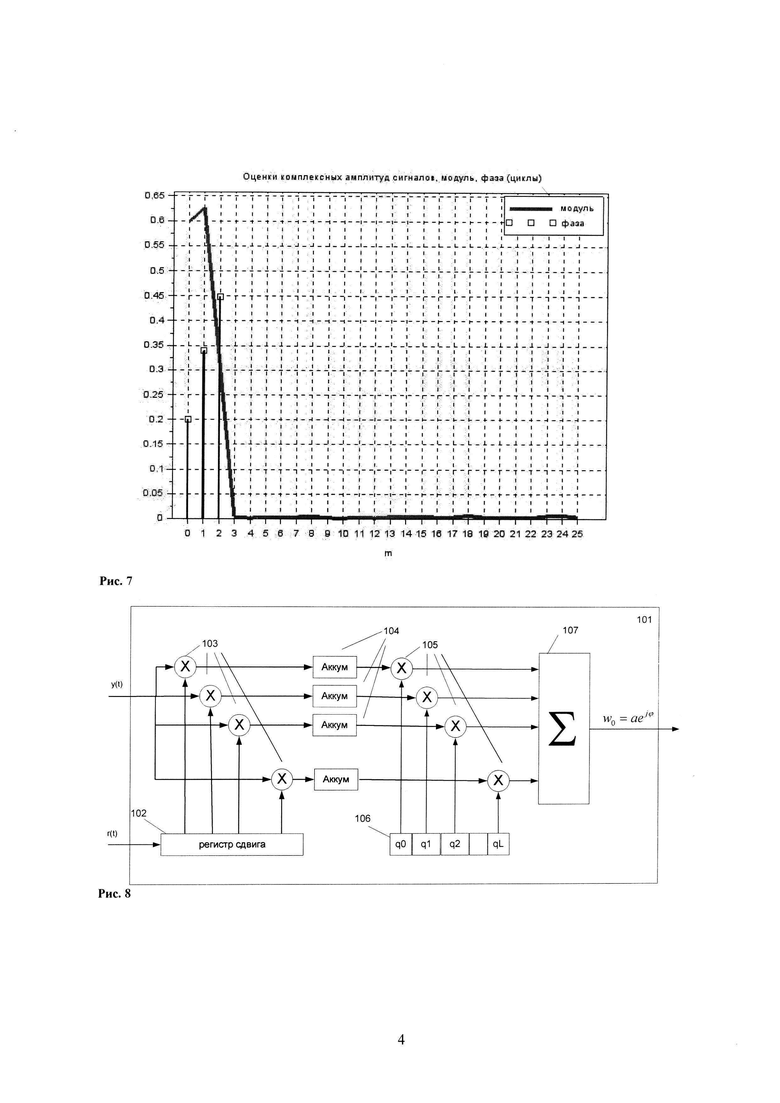
Результаты расчета по (10) представлены на Рис. 7, из которого видно, что оценка фазы, соответствующая τk=0, в точности равна истинной фазе прямого сигнала, несмотря на значительные искажения фазы необработанных корреляционных интегралов (до 0.1 цикла и более), которые видны на Рис. 4. Таким образом, искажающее воздействие отраженного сигнала на оценку фазы прямого сигнала полностью устранено и предлагаемый способ обеспечивает точную оптимальную неитерационную оценку фазы прямого сигнала в условиях воздействия шумов и мешающих отражений без необходимости априорной информации о величине комплексных амплитуд прямого и отраженного сигналов и о их взаимной корреляции.
Устройство оценивания фазы с подавлением мешающих отражений, реализующее предложенный выше способ, показано на Рис. 8. Входной сигнал x(t)⋅e-jωt в L+1 перемножителях 103 умножается на копии псевдослучайного дальномерного кода r(t-τm), m=0, …, L, получаемые на сдвиговом регистре 102 из кода r(t), соответствующего прямому навигационному сигналу. В аккумуляторах 104 формируются значения комплексных корреляционных интегралов ρm (5), m=0, …, L, которые в умножителях 105 умножаются на действительные коэффициенты qm, хранящиеся в регистрах 106, а результаты перемножений qm⋅ρm суммируются в сумматоре 107. Таким образом, максимально правдоподобная оценка комплексной амплитуды прямого сигнала получается на выходе сумматора 107 в соответствии с (12), а аргумент комплексной амплитуды на выходе сумматора 107 представляет собой оценку фазы прямого навигационного сигнала, «очищенную» от мешающих отражений многолучевого распространения.
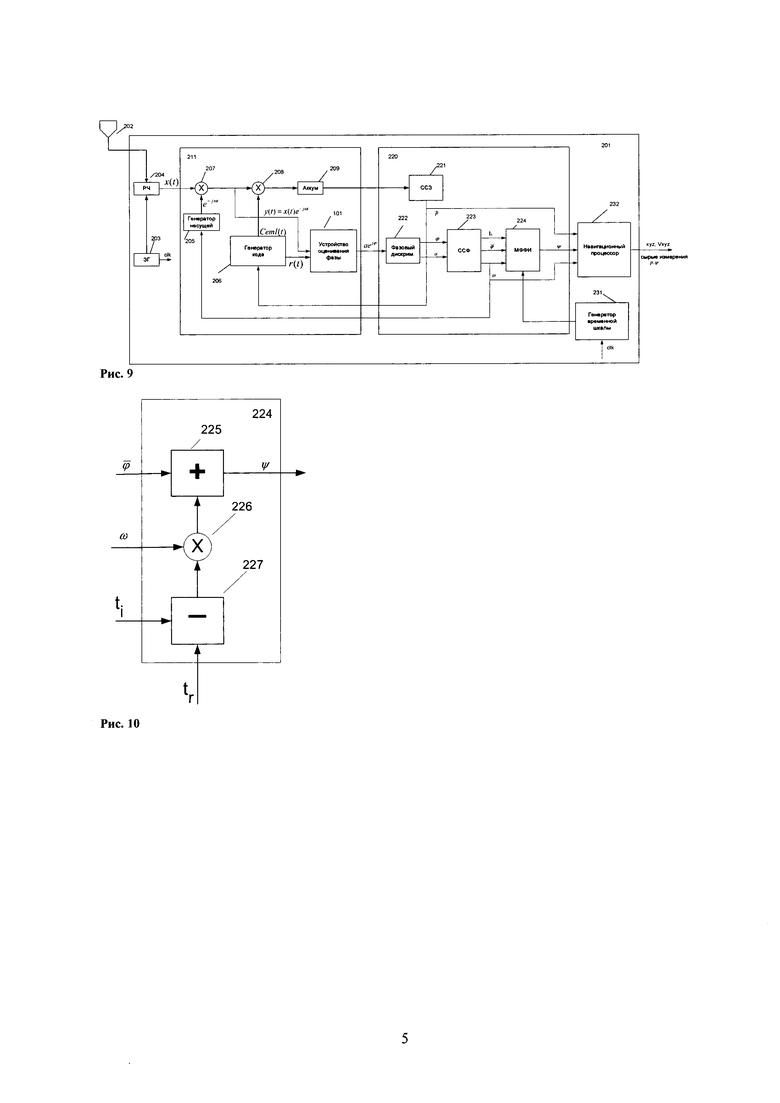
Предлагаемый приемник спутниковой навигации 201 с устройством подавления мешающих отражений многолучевого распространения при оценке фазы (Рис. 9) содержит последовательно соединенные радиочастотный преобразователь 204, многоканальный коррелятор 211 (на Рис. 9 показан только один канал коррелятора), блоки цифровой обработки корреляционных данных 220 (на Рис. 9 показан только один такой блок) и навигационный процессор 232, причем работа всех составных частей синхронизируется от одного задающего генератора 203. Кроме того, в приемнике имеется генератор временной шкалы 231, выход которого используется для оцифровки моментов времени, к которым относятся сырые измерения и данные навигационных определений. Приемник работает следующим образом. Сигнал, принятый антенной 202, подается на радиочастотный блок 204, который его усиливает, фильтрует, выполняет преобразование на более низкие частоты и преобразует в цифровую форму. Все вышеуказанные операции в приемнике 201 полностью аналогичны тем, которые выполняются в приемнике-аналоге и приемнике-прототипе. Оцифрованный сигнал подвергается корреляционной обработке в многоканальном корреляторе 211.
Каждый канал многоканального коррелятора может быть настроен на частоту и код одного спутника в одном частотном диапазоне. Для этого входной дискретизированный по времени комплексный сигнал x(t) в умножителе 207 умножается на комплексный опорный сигнал e-jωt, частота которого с высокой точностью выравнена с частотой прямого навигационного сигнала данного спутника. Полученный в результате сигнал y(t)=x(t)⋅e-jωt умножается на дальномерный код данного спутника в умножителе 208 и интегрируется в аккумуляторе 209, выход которого обычным образом обрабатывается и фильтруется в системе слежения за задержкой 221 в блоке цифровой обработки корреляционных данных 220 данного спутника, а отфильтрованные данные управляют генератором кода 206, обеспечивая замкнутую обратную связь петли слежения за задержкой. Параллельно с этим, сигнал y(t)=x(t)⋅e-jωt подается на вход устройства оценивания фазы 101, на другой вход которого подается сигнал копии дальномерного кода от генератора кода 206. Выходной комплексный сигнал блока 101, "очищенный" от мешающих отражений, обрабатывается в фазовом дискриминаторе 222, по результатам которого в системе слежения за фазой 223 вырабатываются сглаженные оценки фазы ϕ и частоты ω. Сглаженная частота ω используется обычным образом для управления генератором несущей 205, обеспечивая замкнутую обратную связь петли слежения за фазой несущей.
В каждом блоке цифровой обработки корреляционных данных 220 имеется также модуль формирования фазовых измерений (МФФИ) 224 (Рис. 10), в котором на основе сглаженных оценок фазы ϕ, частоты ω, оцифрованного значения момента считывания корреляционных данных ti и с использованием данных генератора шкалы времени приемника tr 231 вырабатывается измерение фазы несущей ψ, приведенное к заданному моменту tr по шкале времени приемника. Все данные, полученные на выходе блока цифровой обработки корреляционных данных 220, передаются в навигационный процессор 232, в котором осуществляется решение навигационной задачи и передача потребителю сообщений, содержащих координаты, компоненты вектора скорости навигационных определений и сырые измерения псевдодальностей и псевдодопплеровских фаз.
Заявляемый приемник и устройство оценивания фазы с подавлением мешающих отражений состоят из функциональных блоков, устройство которых широко известно в области спутниковой навигации. Например, различные методы реализации радиочастотного преобразователя 204 описаны в [14], [15] и [16], в заявляемом приемнике может быть использована любая из микросхем, описанных в [15]. Устройства ССЗ 221 и ССФ 223 также хорошо известны из [14], а различные способы формирования фазовых измерений в блоке 224 подробно рассмотрены в [5]. В качестве навигационного процессора 232 могут быть использованы, например, различные микропроцессорные ядра, разработанные компанией ARM Limited. В качестве задающего генератора 203 может быть использована любая из выпускаемых различными компаниями микросхем ТСХО или кварцевых генераторов, в качестве генератора временной шкалы 231 - любые из выпускаемых электронной промышленностью микросхем двоичных счетчиков.
Предлагаемый приемник спутниковой навигации с устройством оценивания фазы с подавлением мешающих отражений обеспечивает решение технической задачи исключения ошибок фазовых измерений, вызванных отраженными сигналами, без затрат времени и ресурсов на выполнение итерационных процессов и без необходимости априорной информации о величине комплексных амплитуд прямого и отраженного сигналов и о их взаимной корреляции.
На Рис. 1 представлена функциональная схема приемника-аналога.
На Рис. 2 представлена функциональная схема приемника-прототипа.
На Рис. 3 представлены пример смеси прямого и отраженного сигналов на выходе коррелятора, действительная часть, мнимая часть и модуль.
На Рис. 4 представлена та же смесь прямого и отраженного сигналов, как на Рис. 3, но в виде модуля и аргумента комплексных корреляционных интегралов.
На Рис. 5 представлена матрица R-1 рассматриваемого примера.
На Рис. 6 представлен вектор весовых коэффициентов q={qm} рассматриваемого примера.
На Рис. 7 представлены результаты расчета оценок модуля и аргумента комплексных амплитуд прямого (при к=0) и отраженных сигналов.
На Рис. 8 представлена функциональная схема заявляемого устройства подавления мешающих отражений при оценке фазы.
На Рис. 9 представлена функциональная схема заявляемого приемника спутниковой навигации с устройством подавления мешающих отражений при оценке фазы.
На Рис. 10 представлен пример функциональной схемы модуля формирования фазовых измерений.
Источники информации
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ (редакция 5.1). РНИИКП 2008"
2. Interface Specification IS-GPS-200, rev. H, 2013.
3. Galileo Open Service Signal In Space Interface Control Document, issue 1.1, Sept.2010.
4. BDS-SIS-ICD-B1I-1.0, Dec.2012.
5. Поваляев A.A. Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат. - М.: Радиотехника, 2008.
6. Garin L., Van Diggelen F. and Rousseau J.M. "Strobe and Edge Correlator Multipath Mitigation for Code", proceedings of ION GPS-96, Kansas City, September 17-20.
7. Garin L. and Rousseau J.M. Enhanced Strobe Correlator, Proceedings of ION GPS-97, Kansas City, September 16-19.
8. Townsend, В., et al, (1995) "Performance evaluation of the multipath estimating delay lock loop," Navigation: Journal of the Institute of Navigation, vol 42, no 3, Fall, pp. 503-514.
9. Fenton P.C, Apparatus for and Method of Making Pulse-Shape measurements. US Pat. No. 8,467,433 B2, Jun. 18, 2013.
10. J.k. Ray, M.E. Cannon. Characterization of GPS Carrier Phase Multipath. ION NTM-99, San Diego, January 25-27.
11. Мун Вэнг Джин (KR), Донгвук Ким (KR), Джае Чэн Чанг (KR), Харисов В.Н. (RU), Ефименко B.C. (RU), Булавский Н.Т. (RU), Иванов В.И. (RU), Емец С.В. (RU), Третьяков А.Н. (RU). Способ синхронизации радиосигнала. Патент РФ №2278470 С2, 20.06.2006.
12. Б.Р. Левин. Теоретические основы статистической радиотехники. М., Сов. радио, 1968.
13. М. Кендалл, А. Стьюарт. Статистические выводы и связи. М., Наука, 1973.
14. Van Dierendonck, A.J., "GPS Receivers," in: Global Positioning System: Theory and Applications, Vol I, Parkinson, B.W. and Spilker, J.J. Jr., eds., American Institute of Aeronautics and Astronautics, Washington, 1996, pp. 329-407.
15. D.K. Shaeffer, T.H. Lee. The Design and Implementation of Low-Power CMOS Radio Receivers. Kluwer Academic Publishers, Boston/Dordrecht/London, 1999.
16. Raymond A. Eastwood "An Integrated GPS/Glonass receiver". - "Navigation" (USA), 1990, 2, - pp. 141-151.
Изобретение относится к радионавигации, конкретно к приемникам сигналов спутниковых радионавигационных систем, предназначенным для использования в прецизионных дифференциально-фазовых системах позиционирования. Технический результат состоит в устранении ошибок оценки фазы прямого навигационного сигнала, вызванных мешающими отраженными сигналами многолучевого распространения. Для этого приемник содержит задающий генератор, радиочастотный преобразователь, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов, генератор временной шкалы приемника и навигационный процессор. Каждый канал цифрового коррелятора содержит устройство подавления мешающих отражений при оценке фазы, а каждое устройство цифровой обработки корреляционных отсчетов содержит модуль формирования фазовых измерений. Устройство подавления мешающих отражений при оценке фазы содержит регистр весовых коэффициентов, сдвиговый регистр копии, совокупность М смесителей кода, М накапливающих сумматоров, М перемножителей и М-входовой сумматор, на выходе которого формируется оценка фазы прямого навигационного сигнала. 2 н. и 2 з.п.ф-лы, 10 ил.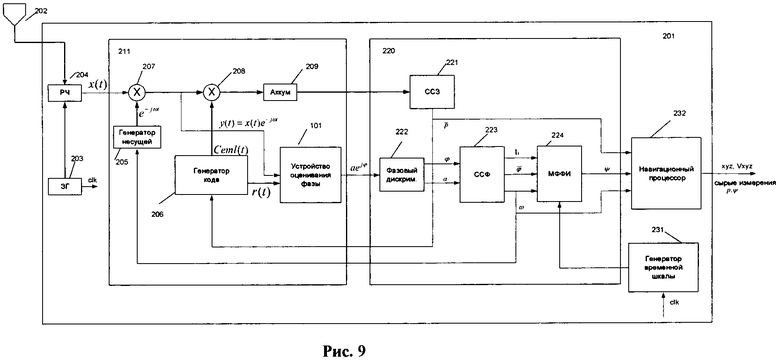
1. Способ оценивания фазы навигационного сигнала с подавлением мешающих отражений многолучевого распространения, основанный на методе максимального правдоподобия (МП) таким образом, что комплексная амплитуда w0 прямого сигнала формируется как взвешенная с весами qm сумма корреляций ρm комплексного входного сигнала с совокупностью копий дальномерного кода r(t-τm), m=0, …, L, перекрывающих область возможных задержек отраженных сигналов относительно прямого навигационного сигнала, т.е. w0=q⋅ρ=Σ, qm⋅ρm, где q - первая строка матрицы Q, предварительно вычисленной как Q=R-1, где R={Rkm} - теплицева матрица, соответствующая автокорреляционной функции дальномерного кода, взятой в точках {τm}, причем оценка фазы, не искаженная мешающими отражениями, формируется как аргумент комплексного числа w0.
2. Приемник спутниковой навигации с устройством подавления мешающих отражений при оценке фазы, содержащий задающий генератор, генератор временной шкалы, вход которого соединен с выходом задающего генератора, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, вход которого соединен с выходом многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит систему слежения за задержкой, фазовый дискриминатор и систему слежения за фазой, отличающийся тем, что в каждый канал многоканального коррелятора дополнительно вводится устройство подавления мешающих отражений при оценке фазы, первый вход которого является сигнальным и соединен с выходом смесителя несущей, второй вход соединен с выходом опережающей копии генератора дальномерного кода, и выход соединен с входом фазового дискриминатора многоканального устройства цифровой обработки корреляционных отсчетов, а в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов дополнительно вводится модуль формирования фазовых измерений, первый вход которого соединен с фазовым выходом системы слежения за фазой, второй вход соединен с выходом частоты системы слежения за фазой, третий вход соединен с выходом оцифровки времени системы слежения за фазой, четвертый вход соединен с выходом генератора временной шкалы приемника, а выход соединен с входом навигационного процессора.
3. Приемник по п. 2, в котором устройство подавления мешающих отражений при оценке фазы содержит регистр весовых коэффициентов, сдвиговый регистр копии, вход которого соединен с выходом опережающей копии генератора дальномерного кода, совокупность М смесителей кода, у каждого из которых первый вход соединен с сигнальным входом устройства подавления мешающих отражений, а второй вход m -го смесителя кода соединен с m-й ячейкой сдвигового регистра, совокупность М накапливающих сумматоров, причем вход m-го накапливающего сумматора соединен с выходом m-го смесителя кода, совокупность М перемножителей, причем первый вход m-го перемножителя соединен с выходом m-го накапливающего сумматора, а второй вход m-го перемножителя соединен с выходом m-й ячейки регистра весовых коэффициентов, и М-входовой сумматор, входы которого соединены с выходами перемножителей, а выход является выходом устройства подавления мешающих отражений при оценке фазы.
4. Приемник по п. 3, в котором модуль формирования фазовых измерений содержит блок вычитания, первый вход которого соединен с третьим входом модуля, а второй вход соединен с четвертым входом модуля, перемножитель, первый вход которого соединен со вторым входом модуля, а второй вход соединен с выходом блока вычитания, и сумматор, первый вход которого соединен с первым входом модуля, второй вход соединен с выходом перемножителя, а выход является выходом модуля формирования фазовых измерений.
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| CN 0102213766 B, 23.10.13 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

