Изобретение относится к летательным аппаратам тяжелее воздуха с машущим крылом. Оно позволяет обеспечить законы машущего движения, оптимального на различных режимах, устойчивость и управление полетом.
Известны летательные аппараты тяжелее воздуха с машущим крылом. Они разделяются по устройству крыла на три группы:
- маховое без поворота сечений крыла, которое обеспечивает подъемную силу только при наличии нужной для полета на данной скорости тяги;
- мягкое;
- обычное самолетное крыло на подвеске, позволяющей ему совершать поступательное вертикальное движение и поворот вокруг оси, параллельной маху (см., например, ИР-84-1, стр.14-15).
Все проекты по сути сводятся к тому, что при движении вниз крыло образует единую плоскость, а двигаясь вверх, так или иначе флюгируется.
Научный анализ конкретных известных конструкций ставит под сомнение возможность построения реальных (не модельных) летательных аппаратов с машущим крылом (см., например, А.А.Борин. Полет птицы и полет человека, Квант № 9, 1988 год, стр.9-16).
Схема орнитоптера заведомо порочна и пригодна только для небольшой модели.
Основной, если не единственной схемой, пригодной для натурного искусственного аппарата машущего полета, является жесткое крыло, колеблющееся как единое твердое тело в вертикальном направлении с поворотом вокруг оси, параллельной маху.
Однако низкая эффективность работы таких конструкций не разрешает основного противоречия между весогабаритными показателями летательного аппарата и требуемой мощностью энергоустановки.
Вышесказанное в полной мере относится к устройствам по А.С. СССР № 1052248, кл. А 63 Н 27/00,1982 г., А.С. СССР № 1345546, кл. В 64 С 33/02,1986 г., Патенту Германии № 683608, кл. 62 в 34, 1937 г. или Патенту Аленичева С.И. № 1334, кл. 62 в 3501, 1921 г. и т.д.
Наиболее близким техническим решением к заявляемому (прототипом) может быть принят махолет МАИ (см., например, В.Кисилев. Машущий полет. Фантастика или реальность? Авиация и космонавтика, № 3, 1986 г.), где за счет принудительного движения концов крыльев по восьмеркообразной траектории с изменением угла атаки крыла получен незначительный положительный эффект в виде подъемной силы как составляющей возникающих при этом сил.
Целью изобретения является повышение эффективности работы движителя с машущим крылом и создание натурного аппарата машущего полета.
Цель достигается путем снижения аэродинамического сопротивления перемещению крыльев при их возвращении после маха назад в исходное положение.
Сущность изобретения заключается в том, что махолопастной движитель транспортного средства выполнен в виде двух смещенных на ширину крыльев аэродинамического профиля с гибкой задней кромкой или вставкой. Крылья подвижно закреплены средней частью на штоках центральных гидроцилиндров, которые в свою очередь закреплены в подшипниках силовой рамы и шарнирно связаны со штоками боковых гидроцилиндров, также закрепленных в подшипниках силовой рамы. Боковые гидроцилиндры воздействуют своими штоками на центральные гидроцилиндры двух крыльев, как на качающиеся в противоположные стороны кулисы, а угол поворта (маха) плоскости каждого крыла определяется выдвижением шарнирно закрепленного на нем штока поворотного гидроцилиндра. Поворотные гидроцилиндры также закреплены в подшипниках силовой рамы. Переменные объемы центральных и поворотных, а также боковых гидроцилиндров, сообщены маслопроводами с равнозначными объемами своих цилиндров двух поршневых маслонасосов, коленчатые валы которых связаны непроскальзывающей передачей соотношением 1:2. При этом все взаимоизменяемые объемы центральных и поворотных гидроцилиндров сообщены последовательно с цилиндром маслонасоса, имеющим двойную частоту вращения, а поворотные гидроцилиндры еще и параллельно - с цилиндром маслонасоса, имеющим одинарную частоту вращения.
Для выравнивания действия штоковых и бесштоковых переменных объемов центральных, поворотных и боковых гидроцилиндров при последовательном их подсоединении к основным цилиндрам маслонасосов последние дополнены компенсационными цилиндрами, работающими параллельно и одновременно с основными.
Проведенный патентный поиск показал отсутствие транспортных средств с предлагаемой совокупностью признаков.
Таким образом, в данном случае известные элементы объединены новыми связями, придают транспортному средству новые свойства, проявившиеся в положительном эффекте увеличения несущей способности единицы площади машущего крыла, вследствие чего решение может быть признано имеющим изобретательский уровень.
Сущность изобретения поясняется чертежами, где:
- на фиг.1 показан вид транспортного средства спереди и пример схемы кинематических связей его привода (движителя);
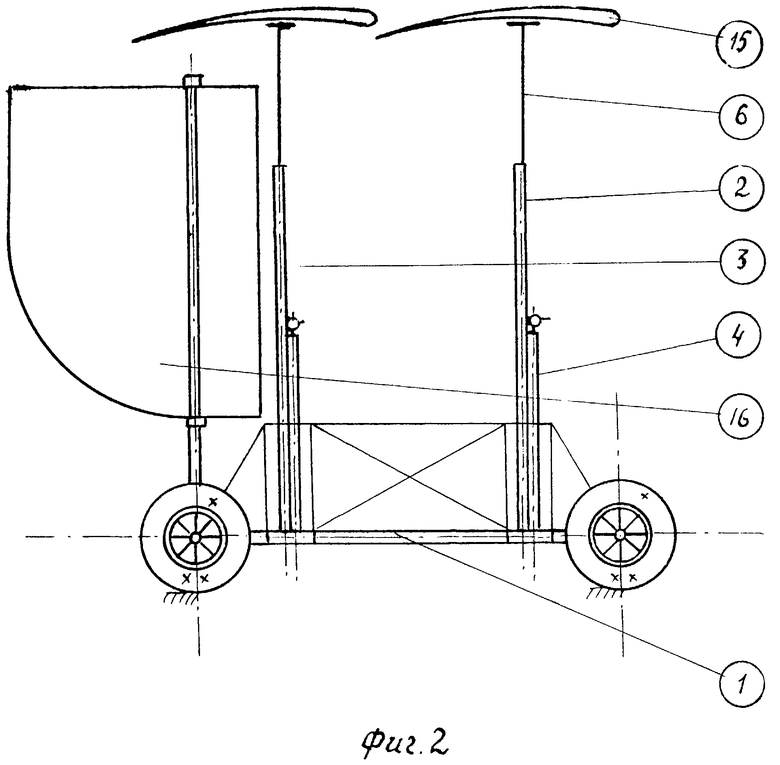
- на фиг.2 показан вид транспортного средства сбоку;
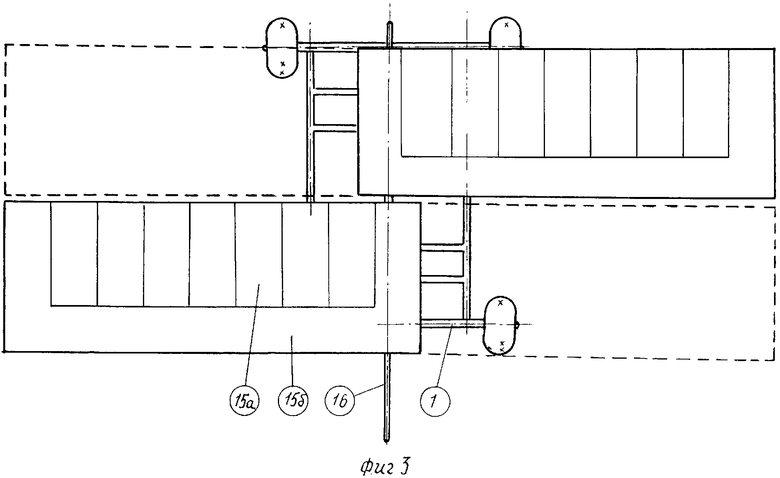
- на фиг.3 показан вид транспортного средства сверху;
- на фиг.4 показана принципиальная схема работы автономного привода транспортного средства.
Транспортное средство содержит силовую раму 1, которая может быть трансформирована в корпус аэродинамической формы, позволяющий совершать взлет и посадку на твердое покрытие, зыбкую поверхность и воду.
На силовой раме 1 подвижно закреплены центральные 2, поворотные 3 и боковые 4 гидроцилиндры со своими поршнями 5 и штоками 6.
На силовой раме 1 крепится также регулируемый двигатель 7 и два поршневых маслонасоса 8 и 9. Их коленчатые валы соединены непроскальзывающей передачей, например зубчатой, цепной и т.д., имеющей передаточное отношение 1:2. Благодаря этому вал маслонасоса 8 имеет двойную частоту вращения по сравнению с номинальной (одинарной) частотой вращения вала насоса 9.
Маслонасос 8 имеет основной цилиндр 10 и три малых компенсационных цилиндра 11 (на фиг.4 показан один), расположенных в плоскостях, параллельных плоскости фиг.4.
Маслонасос 9 также имеет основные, расположенные под прямым углом цилиндры 12 и 13, каждый из которых может быть дополнен одним компенсационным (не показаны).
В принципе, маслонасос 8 может иметь только один цилиндр 10 (основной), а маслонасос 9 - два цилиндра 12 и 13, переменные объемы которых сообщены с переменными объемами гидроцилиндров 2, 3 и 4 маслопроводами 14, как показано на фиг.1, без каких-либо регулирующих или запорных органов. Но для того чтобы последовательное сообщение штоковой полости центрального гидроцилиндра 2 с бесштоковой полостью поворотного гидроцилиндра 3 и т.д. (см. фиг.1) обеспечивало эквивалентное действие, гидроцилиндрам 2 и 3 в выдвижении штоков 6 необходима или компенсация объема, занятого штоком 6, компенсационным цилиндром 11 в насосе 8 при одинаковом диаметре всех гидроцилиндров, как показано на фиг.4, или последовательное уменьшение диаметров гидроцилиндров 2 и 3, как показано на фиг.1.
Действие стоящих в одном ряду основного 10 и компенсационных 11 цилиндров маслонасоса 8 должно быть одновременным, что достигается, например, расположением их шатунов на одном кривошипе.
На штоках 6 центрального 2 и поворотного 3 гидроцилиндров в точках а и б шарнирно закреплено каждое из двух смещенных по оси полета относительно центра тяжести (ЦТ) не менее чем на ширину крыльев 15.
Несущие плоскости двух крыльев 15 находятся в противофазе, т.е. при максимальном выдвижении (размахе) одного слева от оси полета (центра силовой рамы 1) другое симметрично в таком же положении находится справа. При работе движителя они меняются местами, как показано на фиг.3 пунктиром.
Крыло 15 состоит из жесткой передней части 15а и гибкой задней вставки 15б. Они позволяют одновременно с подъемной, направленной вверх, силой создавать тяговую, направленную по оси полета, следствием которой при движении транспортного средства является еще одна подъемная сила, обусловленная аэродинамической формой крыла 15.
Все это и определяет высокую несущую способность транспортного средства.
По оси на силовой раме 1, кроме центральных гидроцилиндров 2, может быть закреплена вертикальная плоскость рулевого управления 16. Она же стабилизирует аппарат от некоторых курсовых колебаний, связанных с разнесением крыльев 15 на ширину.
Как уже отмечалось, переменные объемы центральных 2 и поворотных 3, а также боковых 4 гидроцилиндров сообщены маслопроводами 14 с равнозначными объемами своих цилиндров 10, 12 и 13 маслонасосов 8 и 9. Причем переменные объемы центральных 2 и поворотных 3 сообщены с переменными объемами цилиндра 10 маслонасоса 8 последовательно в замкнутую цепь, а переменные объемы только поворотных гидроцилиндров 3 еще и параллельно к ней сообщены с переменными объемами цилиндра 12 маслонасоса 9.
Основная идея, отличающая предложенную конструкцию от прототипа, заключается в создании восьмеркообразных траекторий движения не концов крыльев 15, а двух точек а и б их закрепления на штоках 6 центрального 2 и поворотного 3 гидроцилиндров последовательным сообщением их с цилиндром 10 маслонасоса 8; угловые же перемещения точки б относительно точки а - уже дополнительным параллельным сообщением только поворотных гидроцилиндров 3 с цилиндрами 12 маслонасоса 9.
При этом расстояние между точками а и б может быть равным максимальной несимметрии петель восьмерок их траекторий, а расстояние между параллельными осями подвижного закрепления гидроцилиндров центрального 2 и поворотного 3 на раме 1 выбирается таким, чтобы крыло 15 при продольно-поперечном перемещении не отрывалось от точки О пересечения восьмерок траекторий, как бы получая скользящее закрепление в ней.
Предварительно расстояние между осями закрепления центрального 2 и поворотного 3 гидроцилиндров на раме 1 принимается равным половине расстояния между точками а и б. При опытно-конструкторских разработках оно может быть скорректировано.
С целью уменьшения несимметрии петель восьмерок траекторий маслонасосы 8 и 9 выполнены с подвижными (качающимися) цилиндрами 10, 12 и 13 за счет шарнирного их закрепления на раме 1, хотя возможно выполнение их неподвижными при наличии кривошипно-шатунного механизма.
Строгое прохождение плоскости крыла 15 вверх в исходное для последующего маха с другой стороны от оси полета концевой кромкой под углом, близким к нулю, достигается подбором такой емкости (производительности) поворотного цилиндра 12 маслонасоса 9, которой обеспечивается поворот плоскости крыла 15 на угол α, равный углу пересечения петель восьмерки траекторий движения точки а в точке О, т.е. α≈90°.
Сообщение маслопроводами 14 взаимоизменяемых объемов гидроцилиндров 2, 3 и 4 с объемами рабочих камер цилиндров 10, 11, 12 и 13 маслонасосов 8 и 9 и заполнение этих объемов маслом вследствие практической несжимаемости жидкости заключает все подвижные элементы описанной конструкции в жесткую кинематическую связь, при которой каждому угловому положению вала двигателя 7 и коленчатых валов маслонасосов 8 и 9 соответствует свое единственное пространственное положение поршней 5 гидроцилиндров 2, 3 и 4, а значит и точек а и б шарнирного закрепления крыльев 15 на штоках 6, т.е. здесь применена гидравлическая жесткая кинематическая связь, при которой траектория движения крыльев 15 слагается из продольно-поперечного перемещения штоков 6 гидроцилиндров 2, 3 и 4. При этом перемещение штоков 6 поворотных (маховых) гидроцилиндров 3 есть результат суммирования действия поршней 5 цилиндров 10 и 12 маслонасосов 8 и 9 одновременно.
Жесткая кинематическая связь подвижных элементов махолопастного движителя определяет взаимозависимость их пространственного положения, и вращение вала двигателя 7 обуславливает перемещение крыльев 15 по наиболее оптимальному закону, когда точка а прикрепления штока 6 центрального гидроцилиндра 2 совершает восьмеркообразную траекторию, а вся рабочая плоскость крыла 15, отбросив значительную массу окружающей среды (воздуха) вниз, возвращается вверх в исходное для последующего маха уже с другой стороны от оси движения ребром (торцевой кромкой) под углом, близким к нулю, чем достигается значительное снижение аэродинамического сопротивления перемещению крыльев 15.
Коэффициент полезного действия (КПД) махолопастного движителя транспортного средства можно оценить, сравнивая площадь (или объем), ометаемую (вытесняемую) крылом 15 при движении вниз, когда создается полезная работа и подъемная сила, с площадью (объемом), ометаемой крылом 15 при возврате его вверх в исходное для последующего маха положение.
Совершенно очевидно, что при длине крыла 15, равной размеру поступательного перемещения его поперек направления движения транспортного средства, т.е. того перемещения, которое обеспечивается крылу 15 боковым гидроцилиндром 4, площадь, ометаемая крылом 15 (или вытесненный объем воздуха) при возвращении его вверх в исходное положение равна нулю, т.е. работы по созданию отрицательной подъемной силы движитель не совершает.
Следует учесть, что скорость движения (махов) крыльев 15 незначительна, поэтому внутренние гидравлические и механические потери как и силы инерции малы для натурного аппарата машущего полета, а траектория движения маховых масс выбрана таким образом, что крыло 15, завершив мах, органично по инерции движется вверх на другую сторону от оси полета не плоскостью, а строго торцевой кромкой.
Следовательно, ожидаемый КПД предлагаемой конструкции может быть выше КПД птиц.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОУСТАНОВКА | 1993 |
|
RU2075635C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ДВИЖИТЕЛЬ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2384469C2 |
| СЧЕТЧИК ДОЗ ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕКАЧИВАЕМОЙ СРЕДЫ ПРИ УЧЕТЕ СЖИГАЕМОГО ТОПЛИВА И БЫТОВЫХ НУЖД ВОДЫ ИЛИ ГАЗА | 1993 |
|
RU2081399C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
| ВЕТРОСИЛОВАЯ УСТАНОВКА | 2007 |
|
RU2335428C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |

Изобретение относится к летательным аппаратам тяжелее воздуха с машущим крылом. Транспортное средство содержит силовую раму, крылья, боковые, поворотные и центральные гидроцилиндры для махового движения крыльев. Крылья подвижно закреплены средней частью на штоках центральных гидроцилиндров, сидящих в подшипниках силовой рамы и связанных со штоками боковых гидроцилиндров. Гидроцилиндры сообщены с поршневыми маслонасосами, коленчатые валы которых связаны непроскальзывающей передачей. Гидроцилиндры и маслонасосы образуют жесткую кинематическую связь, при которой вращение вала двигателя и коленчатых валов маслонасосов вызывает маховое движение крыльев попеременно по разные стороны от направления полета. Технический результат - повышение устойчивости машущего движения на различных режимах полета. 4 ил.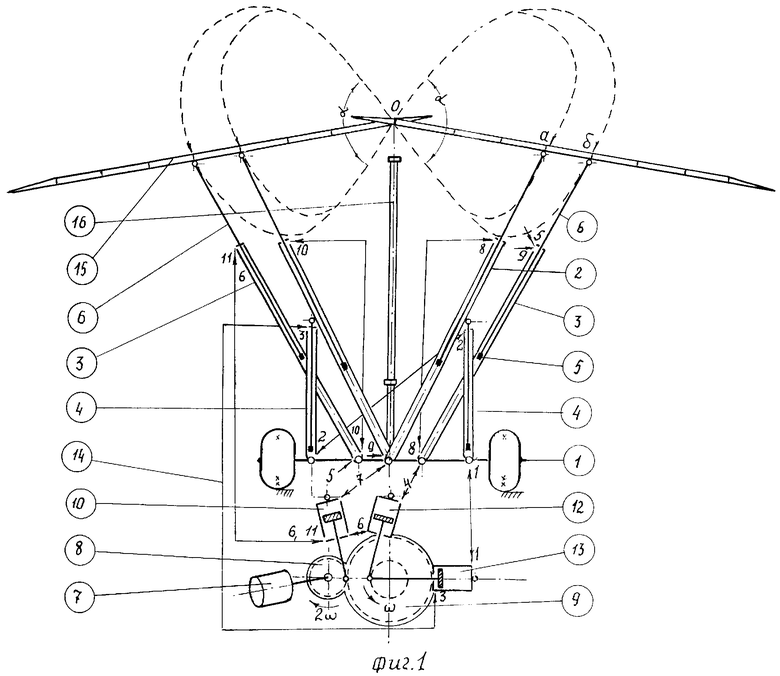
Транспортное средство, содержащее силовую раму, движитель, связанный с регулируемым двигателем посредством передачи, и систему управления полетом, отличающееся тем, что оно выполнено в виде двух смещенных на ширину крыльев аэродинамического профиля с гибкой задней кромкой, подвижно закрепленных средней частью на штоках центральных гидроцилиндров, сидящих в подшипниках силовой рамы и шарнирно связанных со штоками боковых гидроцилиндров, также закрепленных в подшипниках силовой рамы и воздействующих на центральные гидроцилиндры, как на качающиеся в противоположные стороны кулисы, а угол поворота плоскости каждого крыла определяется выдвижением шарнирно закрепленного на нем штока поворотного гидроцилиндра, также сидящего в подшипниках силовой рамы, при этом переменные объемы центральных и поворотных, а также боковых, гидроцилиндров сообщены маслопроводами с равнозначными объемами своих цилиндров двух поршневых маслонасосов, коленчатые валы которых связаны непроскальзывающей, например зубчатой, передачей соотношением 1:2 таким образом, что все взаимоизменяемые объемы центральных и поворотных гидроцилиндров сообщены с цилиндром маслонасоса, имеющего двойную частоту вращения, последовательно, а поворотные гидроцилиндры еще и параллельно с цилиндром маслонасоса, имеющего одинарную частоту вращения.
| КИСИЛЕВ В | |||
| Машущий полет | |||
| Авиация и космонавтика | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 3608991 A, 24.09.1987 | |||
| US 4749149 А, 07.06.1988 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

