Изобретение относится к авиационной технике, в частности к машущекрылым летательным аппаратам (МЛА) - махолетам, использующим в полете машущие крылья для создания подъемной силы и тяги.
Известен способ образования толкающей и подъемной силы, необходимой для полета с помощью маховых движений передних и задних крыльев, расположенных в одной плоскости и сдвинутых в пространстве, при этом указанную силу образуют за счет одновременного и синхронного махового движения каждой пары крыльев, расположенных симметрично по отношению к оси фюзеляжа, причем движения пары передних крыльев опережают по фазе на 90° маховые движения пары задних крыльев (патент РФ №2344968, B64C 33/00, публикация 2009 г.).
Данный способ реализован конструкцией летательного аппарата - махолета, содержащего фюзеляж, две пары крыльев, симметрично расположенных в одной плоскости с каждого борта, шарниры, установленные на фюзеляже и связывающие крылья с фюзеляжем, рабочий механизм для образования маховых движений крыльев, допускающий изменение угла атаки каждого крыла в отдельности, и силовую установку, при этом лопасти крыльев выполнены из гибкого пружинящего материала, рабочий механизм каждого борта состоит из коленвалов, сочлененных с силовой установкой, каждый коленвал содержит два колена, колена шарнирно через ползуны сочленены со штоками, колена передней пары крыльев сдвинуты на 90° по отношению к коленам задней пары крыльев по направлению вращения коленвалов, положения колен правой и левой стороны борта зеркально симметричны по отношению к вертикальной плоскости, делящей фюзеляж пополам, а силовая установка выполнена с возможностью вращения коленвалов в разные стороны.
Известные технические решения предполагают «силовое» управление машущими крыльями, которое невозможно осуществить на больших махолетах из-за так называемого масштабного фактора - момент инерции крыльев при увеличении размеров увеличивается в пятой степени от линейного размера.
Известен способ приведения в движение машущих крыльев орнитоптера, включающий механическое воздействие возмущающих сил на колебательную систему крыльев с упругим элементом с последующим аккумулированием упомянутых воздействий и преобразованием вынужденных колебаний в автоколебания системы крыльев, при этом в автоколебания преобразуют вынужденные маховые колебания крыльев, аккумулируют воздействия возмущающих сил, получаемых от бортового источника энергии, а на крылья воздействуют возмущающей силой периодически и синхронно с частотой собственных колебаний крыльев и приводят колебательную систему крыльев в состояние резонанса с последующим поддержанием ее в этом состоянии. В качестве бортового источника энергии используют мускульный привод, и/или пневмопривод, и/или гидропривод, и/или двигатель внутреннего сгорания или их сочетание (заявка РФ №2007118565, МПК B64C 33/02, публикация 2008 г.).
Известный способ позволяет преодолеть влияние сил инерции за счет поддержания колебаний крыльев с резонансной частотой, но не может обеспечить управляемость полета, так как является однорежимным и не обеспечивает управление скоростью полета.
Известен летательный аппарат с машущими крыльями, который может летать, взмахивая крыльями, и состоящий из корпуса, торсионного вала, который свободно вращается в корпусе, приводного механизма для вращения торсионного вала и крыльев, совершающих возвратно-поступательные движения между двумя точками и соединенных с торсионным валом таким образом, чтобы вращаться вместе с ним и вращаться под действием крутящего момента относительно торсионного вала. Летательный аппарат с машущими крыльями создает подъемную силу в течение полного цикла взмаха крыльев и исключает создание подъемной силы только лишь в одной половине цикла и ее потерю во второй половине цикла. Поэтому данный летательный аппарат может обеспечить не только устойчивый полет, но и плавное зависание или полет с набором высоты или снижением (патент США №2008251632, МПК B64C 33/00, публикация 2008 г.).
В известном устройстве для оптимизации динамической крутки крыла при махах крыльев используется торсионный вал, но предложенная конструкция не обеспечивает возможности махов большими крыльями с достаточной частотой и амплитудой для осуществления полета.
Известен летательный аппарат, содержащий корпус с шарнирно установленными крыльями, силовую установку и привод машущих движений крыла, при этом силовая установка выполнена в виде двигателя с редуктором, а для привода использованы два кривошипно-шатунных механизма, приводящих в колебательные движения силовые валы, которые посредством цепных передач обеспечивают машущие движения четырех симметричных плоских крыльев, а каждое крыло снабжено механизмом вращения, размещенным в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов (патент РФ №2375253, МПК B64C 33/02, публикация 2009 г.).
В известном летательном аппарате решается частная проблема управления подвижных крыльев по углу их установки в набегающем потоке воздуха. Но жесткий привод через редуктор и кривошипно-шатунный механизм не позволяет создать экономичный и реально действующий механизм для махания достаточно большими крыльями, обеспечивающими полет с человеком на борту.
Известно устройство машущих навстречу друг другу тандемно расположенных крыльев летательного аппарата с приводом, содержащее податливые на кручение крылья и соединенные в противофазе кривошипно-шатунно-коромысловые механизмы, двуплечими рычагами-коромыслами которых являются лонжероны или силовые кромки крыльев, которым трехшарнирные шатуны механизмов сообщают как основное, собственно маховое движение, так и движение автоматической крутки крыла в процессе махания, с возможностью независимых от махания перемещений вперед-назад вдоль оси махания, что вызывает поворот связанных с ними трехшарнирных шатунов вокруг пальцев кривошипов и, соответственно, независимый от режима махания или планирования перекос крыльев вокруг наклоняющихся осей верхних шарниров шатунов (патент РФ №2350509, МПК B64C 33/00, публикация 2009 г.).
В данном устройстве описан частный случай управления круткой крыла (изменением его угла установки в движущемся потоке), решение задачи управления крену не решает главной проблемы - обеспечения преодоления сил инерции движущихся крыльев экономичным способом.
Все известные конструкции махолета не позволяют осуществить управляемый длительный полет с человеком на борту, что подтверждается тем, что ни один махолет с человеком на борту не совершил полноценного полета.
В заявке №2010144350 от 26.10.2010 г. авторами был описан способ приведения в движение машущих крыльев махолета, соединенных с упругим элементом и образующих с ним единую колебательную систему махолета. Описанный в указанной заявке включает периодическое силовое воздействие на крылья, приведение колебательной системы в резонанс и последующее поддержание системы в этом состоянии, при этом в процессе полета изменяют резонансную частоту единой колебательной системы махолета путем изменения жесткости колебательной системы махолета, силовое воздействие осуществляют в крайних точках амплитуды движения крыльев махолета, а величину силового воздействия изменяют пропорционально изменению жесткости единой колебательной системы махолета.
В этой же заявке авторами была описана конструкция махолета, реализующего при своем полете предложенный способ приведения в движение машущих крыльев.
Махолет, описанный в заявке №2010144350, содержит корпус, шарнирно закрепленные на корпусе два крыла, расположенные друг за другом вдоль продольной оси корпуса, и установленные с возможностью встречного махового движения посредством приводных механизмов каждого крыла, содержащих поршневые двигатели, при этом оба крыла соединены друг с другом посредством упругого элемента, образуя с ним единую колебательную систему махолета. Колебательная система махолета выполнена с возможностью изменения ее жесткости, а поршни двигателей приводных механизмов воздействуют непосредственно на крылья махолета.
Задачей предлагаемого изобретения является расширение арсенала технических средств, используемых для создания эффективного и экономичного способа приведения в движение машущих крыльев летательного аппарата и создание устройства, позволяющего повысить скорость и мобильность махолета.
Сущность изобретения заключается в следующем.
Махолет содержит корпус, шарнирно закрепленные на корпусе два крыла, расположенные друг напротив друга относительно продольной оси корпуса, и установленные с возможностью махового движения посредством приводного механизма, содержащего поршневой двигатель, при этом оба крыла соединены друг с другом посредством упругого элемента, образуя с ним единую колебательную систему махолета. Колебательная система махолета выполнена с возможностью изменения ее жесткости в процессе полета и включает упругий элемент постоянной жесткости и упругий элемент переменной регулируемой жесткости. Упругий элемент постоянной жесткости колебательной системы махолета выполнен в виде поперечной рессоры, соединяющей левое и правое крылья, а упругий элемент переменной регулируемой жесткости выполнен в виде двухстороннего пневмоцилиндра, на верхнем штоке которого закреплена рессора, а нижний шток соединен с поршнем двухтактного двигателя.
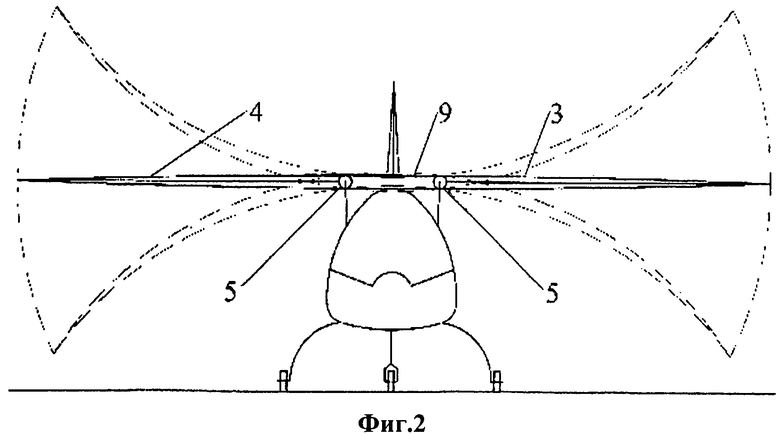
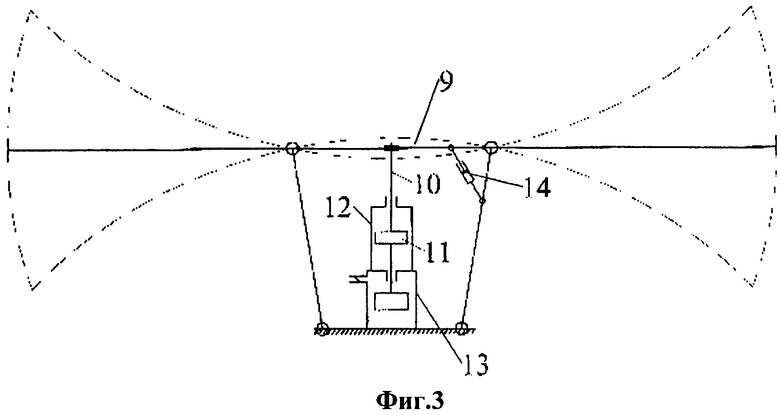
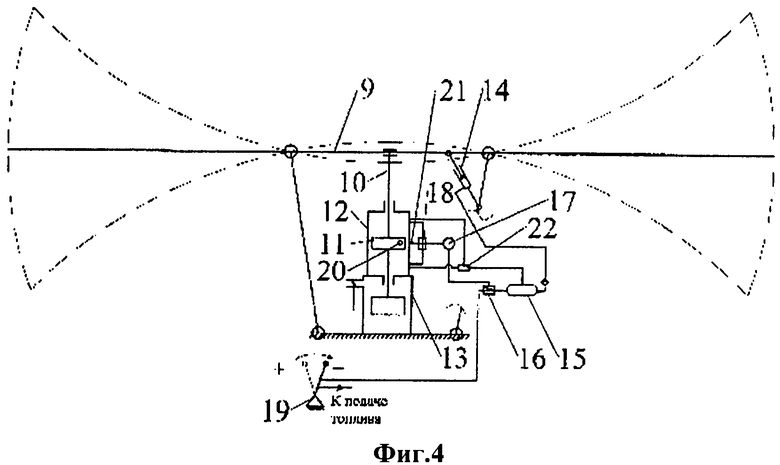
На фиг.1 изображен общий вид махолета, вид сбоку; на фиг.2 - то же, вид спереди; на фиг.3 представлена кинематическая схема махолета; на фиг.4 - схема управления частотой колебания крыльев.
Махолет содержит корпус 1 с кабиной пилота 2 и двумя крыльями: левым 3 и правым 4. Крылья расположены на шарнирах 5 с возможностью поворота относительно корпуса. На корпусе махолета установлены шасси 6, стабилизатор 7 с рулем направления и хвостовое оперение 8 с рулями высоты. Правое и левое крыло между шарнирами 5 соединены упругим элементом 9, выполненным в виде рессоры, работающей на изгиб. В центре упругого элемента 9 вертикально закреплен шток 10. На штоке 10 закреплен поршень 11 пневмоцилиндра 12 двухстороннего действия. На штоке 10 с противоположной упругому элементу стороны закреплен поршень двухтактного двигателя 13. Пневмоцилиндр 12 и двухтактный двигатель 13 объединены в общий блок, который неподвижно закреплен в корпусе махолета. К краю упругого элемента 9 около шарнира 5 закреплен поршень компрессора 14, цилиндр которого сообщен через обратный клапан с ресивером 15. Ресивер 15 через управляемый редукционный клапан 16 соединен с дополнительным ресивером 17, который, в свою очередь, соединен через электромагнитный клапан 18 с полостями пневмоцилиндра.
Редукционный клапан 16 соединен тягой с установленной в кабине пилота рукояткой управления 19 таким образом, что перемещение рукоятки в положение «-» уменьшает давление в дополнительном ресивере 17, а перемещение рукоятки в положение «+» увеличивает давление. На поршне пневмоцилиндра установлена магнитная метка 20, а на корпусе пневмоцилиндра - геркон 21. Пневмоцилиндр 12 дополнительно соединен с ресивером 15 через управляемый клапан 22.
Махолет работает следующим образом.
Пилот садится в кабину 2, расположенную в корпусе 1 махолета, и включает систему запуска, которая через управляемый клапан 22 подает давление в пневмоцилиндр. При этом корпус махолета опирается на землю через шасси 6. Клапан 22 подает давление из ресивера 15 в полость пневмоцилиндра 12 попеременно. При этом усилие пневмоцилиндра передается на крылья 3 и 4 с помощью штока, который изгибает рессору 9. Прогиб рессоры вверх заставляет крылья осуществлять движение вниз, и наоборот, постепенно увеличивая амплитуду колебаний. При достижении заданной амплитуды пилот включает подачу топлива в двухтактный двигатель 13 и отключает систему запуска. При этом количество подаваемого топлива поддерживает колебания системы крыльев с заданной амплитудой. Для осуществления разгона и взлета пилот переводит рукоятку 19 управления из положения «-» в положение «+», увеличивая этим управляющим воздействием мощность силовой установки и частоту колебаний крыльев.
Происходит это следующим образом. Перемещение рукоятки 19 в положение «+» открывает редукционный клапан 16 и сжатый воздух из ресивера 15 подается в ресивер 17 с максимальным давлением. При этом движущийся в пневмоцилиндре поршень с магнитной меткой в средней части траектории включает через геркон 21 электромагнитный клапан 18 и давление ресивера 17 одновременно подается в камеры пневмоцилиндра. При дальнейшем движении поршня геркон закрывает клапан 18 и изолирует полости пневмоцилиндра друг от друга и от ресивера 17.
Дальнейшее перемещение поршня в цилиндре сжимает воздух в камерах, расположенных по ходу движения поршней и приводит к сжатию «газовых пружин», являющихся дополнительным регулируемым упругим элементом в единой колебательной системе «крылья - упругий элемент». Общая жесткость упругих элементов колебательной системы складывается из постоянной составляющей (жесткости рессоры) и регулируемой составляющей, пропорциональной давлению в ресивере 17, которое изменяется пропорционально перемещению рукоятки управления 19. Кроме того, перемещение рукоятки 19 одновременно увеличивает подачу топлива в двухтактный двигатель, и крылья получают соответственно больший силовой импульс.
Перемещение рукоятки 19 в крайнее положение максимально увеличивает частоту колебания крыльев и подачу топлива в двигатель, а соответственно и тягу, создаваемую крыльями. После взлета пилот устанавливает рукоятку 19 в среднее положение, выбрав режим частоты колебания крыльев, соответствующий необходимой скорости движения. Компрессор 14 поддерживает давление в ресивере 15, обеспечивая системы управления и запуска сжатым воздухом.
Управление по высоте, направлению и крену производится обычным самолетным способом с помощью стандартной рукоятки управления самолетом (РУС), отклонение которой вызывает отклонение соответствующих управляющих плоскостей руля направления и высоты.
Единственным отличием является управление по крену, осуществляемое отклонением рулей высоты в разные стороны, так как использование элеронов на подвижных крыльях затруднительно. Так же управление по крену может осуществляться изменением угла установки правого и левого крыльев.
Предложенная конструкция позволяет создание конструкции мобильного и скоростного махолета и может быть использована в спортивных и беспилотных летательных аппаратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| Махолет | 2017 |
|
RU2655582C1 |
| УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2007 |
|
RU2350509C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
Изобретение относится к авиационной технике, в частности к махолетам, использующим в полете машущие крылья для создания подъемной силы и тяги. Махолет содержит корпус, шарнирно закрепленные на корпусе два крыла, расположенные друг напротив друга относительно продольной оси корпуса. Крылья установлены с возможностью махового движения посредством приводного механизма, содержащего поршневой двигатель. Крылья соединены друг с другом посредством упругого элемента, образуя с ним единую колебательную систему махолета. Колебательная система выполнена с возможностью изменения ее жесткости в процессе полета и включает упругий элемент постоянной жесткости и упругий элемент переменной регулируемой жесткости. Упругий элемент постоянной жесткости колебательной системы махолета выполнен в виде поперечной рессоры, соединяющей левое и правое крылья. Упругий элемент переменной регулируемой жесткости выполнен в виде двухстороннего пневмоцилиндра, на верхнем штоке которого закреплена рессора, а нижний шток соединен с поршнем двухтактного двигателя. Достигается повышение скорости и мобильности махолета. 4 ил.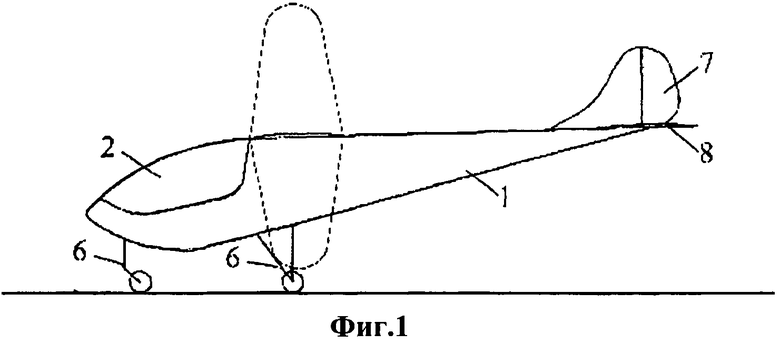
Махолет, содержащий корпус, шарнирно закрепленные на корпусе два крыла, расположенные друг напротив друга относительно продольной оси корпуса, и установленные с возможностью махового движения посредством приводного механизма, содержащего поршневой двигатель, при этом оба крыла соединены друг с другом посредством упругого элемента, образуя с ним единую колебательную систему махолета, которая выполнена с возможностью изменения ее жесткости в процессе полета и включает упругий элемент постоянной жесткости и упругий элемент переменной регулируемой жесткости, отличающийся тем, что упругий элемент постоянной жесткости колебательной системы махолета выполнен в виде поперечной рессоры, соединяющей левое и правое крылья, а упругий элемент переменной регулируемой жесткости выполнен в виде двухстороннего пневмоцилиндра, на верхнем штоке которого закреплена рессора, а нижний шток соединен с поршнем двухтактного двигателя.
| АВТОНОМНЫЙ ЛЕТАТЕЛЬНЫЙ МИНИ-АППАРАТ | 2004 |
|
RU2271311C1 |
| RU 2002107465 A, 10.12.2003 | |||
| Моторный орнитоптер | 1958 |
|
SU119075A1 |
| US 2006102782 A1, 18.05.2006 | |||
| RU 2007118565 A, 27.11.2008. | |||

