Изобретение относится к области авиации, в частности к махолетам-энтомоптерам, летательным аппаратам с крыльями, устроенными по типу крыльев насекомых и копирующими в полете движения крыльев насекомых.
Известен орнитоптер, содержащий корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений крыла. Последний состоит из гидроцилиндра, к штоку которого шарнирно прикреплены концы двух штанг, другие концы штанг шарнирно соединены каждая с основанием соответствующего крыла. RU 2270136, В64С 33/00, 20.02.2006.
Недостатком данного технического решения является то, что оно для махолетов, оснащенных крыльями по типу крыльев насекомых, эластичных, с жесткой передней ведущей кромкой, не может обеспечить режим полета, близкий к ховерингу. Ховеринг - термин, применяемый в англоязычной литературе для обозначения такого режима полета, при котором летающее насекомое как бы «висит» в воздухе (Бродский А.К. Механика полета насекомых и эволюция их крылового аппарата. - Л.: Издательство Ленингр. ун-та. 1988, с. 16). При этом конец крыла насекомого движется по траектории, напоминающую восьмерку.
В зависимости от наклона траектории к горизонту различают три типа ховеринга. При ховеринге первого типа восьмерка почти горизонтальна, а в крайних передней и задней точках траектории крыло сильно вращается вокруг своей продольной оси. При этом развиваемая крылом тяга направлена вверх, и вектор полной аэродинамической силы направлен вверх (Там же, с. 17). Именно это является причиной относительно феноменальной грузоподъемности насекомых, позволяющей им легко зависать на месте и совершать броски вверх.
Техническая реализация ховеринга первого типа весьма проблематична. Реально технически осуществим ховеринг третьего типа. При ховеринге третьего типа крылья двигаются по траектории, перпендикулярной к горизонту: вниз - с углом атаки около 90°, вверх - с нулевым. Он свойственен некоторым насекомым (капустная белянка) при поступательном полете (Там же, с. 17). В полете у насекомого колеблются не только передние ведущие кромки с пластинками крыльев, но и пластинки крыльев вокруг передних ведущих кромок. Причем на махе вниз плоскость крыла поворачивается так, что в самой нижней точке траектории принимает почти вертикальное положение передней ведущей кромкой вверх, а на махе вверх плоскость крыла начинает поворачиваться в другую сторону, так что в самой верхней точке траектории принимает почти горизонтальное положение (Схема траектории крыла насекомого: Бей-Биенко Г.Я. Общая энтомология: Учебник для университетов и сельхозвузов. 3-е изд., доп. - М: Высшая школа, 1980, с. 35).
Реализация колебаний плоскости крыла вокруг продольной оси, которая совпадает с его жесткой передней ведущей кромкой, очень важна. Именно при таких колебаниях в нижней точке траектории крыльев с них сходит вниз вихревое кольцо, через которое передается среде, воздуху, импульс силы (Бродский А.К. Механика полета насекомых и эволюция их крылового аппарата. - Л.: Издательство Ленингр. ун-та. 1988, с. 17, 121). Соответственно и насекомое или энтомоптер получит импульс противоположного направления вверх. У выше названного орнитоптера нет механизма для осуществления колебательного движения крыльев вокруг своих продольных осей и он не сможет осуществить режим полета, близкий к ховерингу третьего типа.
Известен летательный аппарат с использованием машущих крыльев («стрекоза»), содержащий корпус, в котором размещены двигатель с редуктором и двумя кривошипно-шатунными механизмами. Указанные механизмы приводят в колебательное движение два силовых вала, которые посредством цепных передач обеспечивают машущие движения четырех симметричных крыльев. Крылья снабжены механизмом вращения крыла вокруг продольной оси. Механизм вращения расположен в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов. Каждый храповой механизм состоит из двух дисков, один из которых закреплен на лонжероне крыла, а другой диск, с собачкой, может свободно вращаться и выполнен в виде шкива. Механизм имеет рычаг управления. RU 2375253, В64С 33/02, А63Н 27/28, 10.12.2009.
Недостатком данного технического решения является то, что механизмы вращения устроены с возможностью передачи крыльям вращения постоянно в одну и ту же сторону. Нет колебательного движения плоскостей крыльев вокруг их продольных осей, и, следовательно, невозможно осуществить в полете режим, близкий к ховерингу третьего типа.
Известно устройство машущих крыльев с циклической круткой и управлением по крену, содержащее соединенные в противофазе кривошипно-шатунно-коромысловые механизмы, двуплечими рычагами-коромыслами которых являются лонжероны или силовые кромки податливых на кручение крыльев. Кривошипы механизмов посредством трехшарнирных шатунов-подкосов связаны с парами коромысел-лонжеронов каждого крыла так, что возможны возвратно-угловые перемещения с отставанием друг от друга. RU 2298509, В64С 33/02, 10.05.2007.
Недостатком данного технического решения является то, что кинематика шарнирного 4-х звенника, используемого для создания циклических перекосов коромыслов - лонжеронов крыла, не способна создать перекос плоскости крыла в 90° (проверено автором на макете), плоскость крыла колеблется с амплитудой, недостаточной для осуществления в полете режима ховеринга третьего типа. При данном устройстве машущих крыльев ховеринг невозможен.
Известен летательный аппарат, содержащий остов, шарнирно установленные на нем крылья, состоящие из лонжерона, лат и обшивки, пневмосистему. Лонжерон соединен с гибкой тягой, установленной на натяжных роликах. Крыло выполнено по форме треугольника. Латы выполнены из гибкого материала, при этом жесткость каждой латы, расположенной дальше от остова, меньше предыдущей. Пневмосистема состоит из пневмоцилиндра с поршнем, баллона со сжатым газом и блока управления давлением. Баллон соединен магистралями с обеими камерами пневмоцилиндра. Блок управления давлением закреплен на гибкой тяге и соединен с рычагом ручного управления крыльями. Шток поршня связан с гибкой тягой, соединенной в кольцо. RU 2138424, В64С 33/02, 27.09.1999.
Недостатком данного технического решения является то, что отсутствует механизм принудительной крутки крыла. Эластичные крылья выполнены с возможностью крутки под действием напора воздуха, но амплитуды этой крутки недостаточно для реализации режима ховеринга: крылья насекомых тоже эластичные с переменной жесткостью вдоль крыла, но они получают принудительную крутку от так называемых мышц прямого действия (Бей-Биенко Г.Я. Общая энтомология: Учебник для университетов и сельхозвузов. 3-е изд., доп. - М.: Высшая школа, 1980, с. 36).
Наиболее близким к заявляемому техническому решению (прототипом) является транспортное средство, содержащее силовую раму, крылья, боковые, поворотные и центральные гидроцилиндры для маховых движений крыльев. Крылья состоят из жесткой передней части и гибкой задней вставки. Крылья подвижно закреплены средней частью на штоках гидроцилиндров, сидящих в подшипниках силовой рамы и связанных со штоками боковых гидроцилиндров. Гидроцилиндры сообщены с поршневыми маслонасосами, коленчатые валы которых связаны непроскальзывающей передачей. Гидроцилиндры и маслонасосы образуют жесткую кинематическую связь, при которой вращение вала двигателя и коленчатых валов маслонасосов вызывает маховое движение крыльев попеременно по разные стороны от направления полета. RU 2279374, В64С 33/02, 10.07.2006.
Недостатком данного технического решения является то, что плоскости крыльев установлены с возможностью совершать сложные колебательные движения относительно своих поперечных осей (вернее, относительно одной общей поперечной оси), а не продольных. Отсутствует механизм, позволяющий осуществлять колебательные движения плоскостей крыльев относительно их продольных осей. Восьмеркообразная траектория крыльев лежит в плоскости, перпендикулярной направлению полета, что не соответствует ховерингу.
Задачей, на решение которой направлено заявляемое изобретение, является создание махолета, реализующего в поступательном полете режим, близкий к ховерингу третьего типа, с целью увеличения подъемной силы по сравнению с прототипом.
Данная задача решается за счет того, что в заявляемом махолете, содержащем корпус, силовую установку, включающую жестко прикрепленный к корпусу цилиндр с поршнем, шток которого шарнирно связан с крыльями, выполненными по типу крыльев насекомых эластичными, с жесткими передними ведущими кромками и с возможностью вращения вокруг этих кромок, которые шарнирно соединены подкосами крыльев с корпусом, на корпусе могут быть шарнирно установлены две телескопические тяги, шарнирно связанные каждая с жесткой передней ведущей кромкой своего крыла.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность постройки махолета с крыльями, развивающими повышенную подъемную силу.
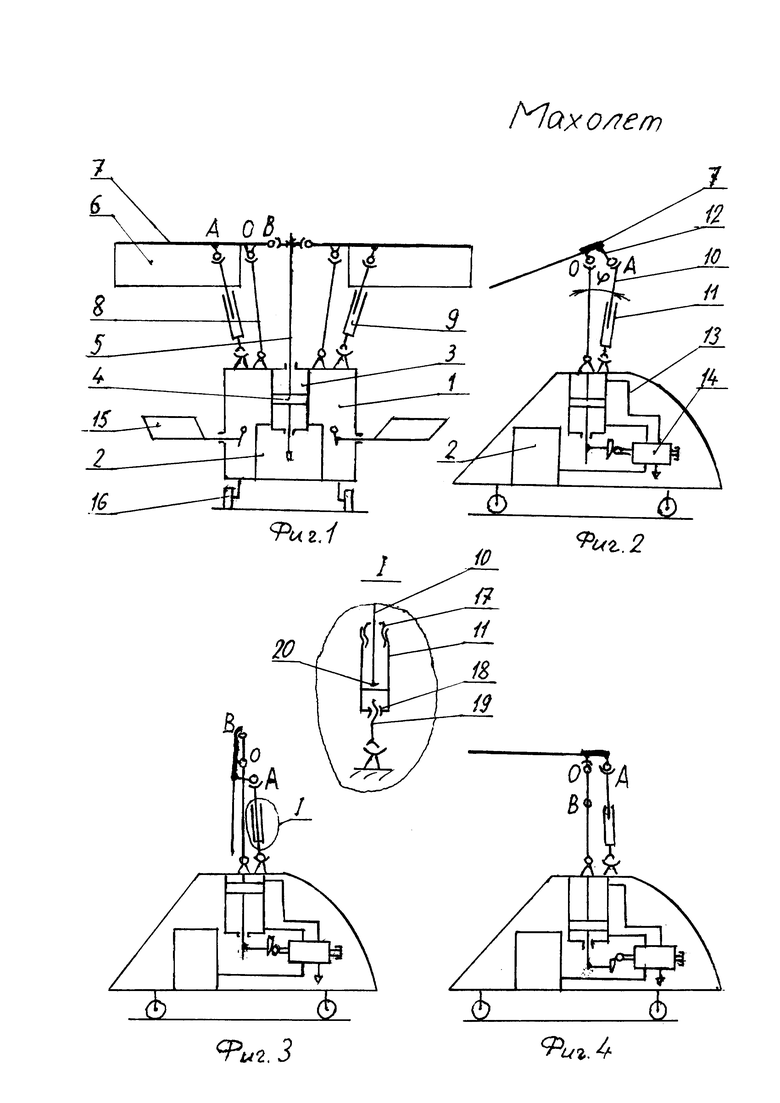
На фиг. 1-4 изображены схемы заявляемого махолета: фиг. 1 и 2 - схемы махолета в среднем положении крыльев соответственно вид спереди и сбоку, фиг. 3 - вид сбоку в конце маха крыльев вниз, фиг. 4 - вид сбоку в конце маха крыльев вверх.
Махолет содержит корпус 1, силовую установку 2, жестко прикрепленный к корпусу цилиндр 3 с поршнем 4, шток 5 которого шарнирно соединен с крыльями 6. Крылья выполнены по типу крыльев насекомых эластичными, с жесткими передними ведущими кромками, роль которых выполняют лонжероны 7. Крылья 6 установлены с возможностью колебания вокруг продольных осей лонжеронов 7, которые подкосами 8 крыльев шарнирно соединены с корпусом. На корпусе 1 шарнирно установлены две телескопические тяги 9, состоящие из осей 10 и полых секций 11. Оси 10 шарнирно соединены со звеньями 12, жестко связанными с лонжеронами 7. Силовая установка 2 соединена с цилиндром 3 трубопроводами 13 через распределитель 14. Махолет снабжен управляющими поверхностями 15, установленными в корпусе 1 с возможностью поворота, и шасси 16. Для регулирования длин телескопических тяг 9 в секции 11 предусмотрена резьбовая крышка 17, а в днище секции 11 - резьбовое соединение 18 для связи со звеном 19 шарнира соединения телескопической тяги с корпусом. Ось 10 телескопической тяги имеет ограничитель 20.
При изготовлении махолета следует придерживаться следующих соотношений, полученных опытным путем: ОА≥ОВ, фиг 1, и ϕ≥8°, фиг. 2,
где OA - длина участка лонжерона от шарнира подкоса крыльев до шарнира телескопической тяги;
ОВ - длина участка лонжерона от шарнира подкоса крыльев до шарнира штока;
ϕ - угол между проекциями осей подкосов и телескопических тяг на плоскость, перпендикулярную лонжеронам.
Так как лонжероны 7 одновременно машут и поворачиваются вместе с плоскостями крыльев 6 вокруг своих продольных осей, следует применять шаровые шарниры.
Махолет работает следующим образом.
При работающей силовой установке 2 (ДВС с компрессором или гидронасосом или паровая машина) и включенном в рабочую позицию распределителе 14 рабочее тело (воздух, масло, пар) поступает в цилиндр 3 и приводит поршень 4 со штоком 5 в возвратно-поступательное движение. Последний приводит в маховые движения лонжероны 7 и связанные с ними плоскости крыльев 6. При выдвижении штока 5 вверх происходит мах крыльев 6 вниз, шарнир А при этом опускается, ось 10 телескопической тяги, связанная с этим шарниром, тоже опускается и упирается в дно секции 11, поворачивая через рычаг 12 крыло 6 вокруг оси его передней ведущей кромки - лонжерона. В результате плоскость крыла занимает положение, близкое к вертикальному передней ведущей кромкой вверх, фиг. 3. Распределитель 14 переключается в другую рабочую позицию, происходит опускание штока 5 вниз и мах крыльев 6 вверх, вверх идет и шарнир А. При этом ось 10 выдвигается из секции 11, упирается ограничителем 20 в крышку 17 и удерживает шарнир А на месте, тогда как мах крыла вверх продолжается. В результате плоскость крыла 6 поворачивается в другую сторону и занимает положение, близкое к горизонтальному, фиг. 4. Следуют колебания плоскостей крыльев 6 вокруг осей их передних ведущих кромок, согласованные с махами. Причем мах вниз начинается с углом атаки в 90°, а мах вверх - с нулевым. Так осуществляется режим полета махолета, близкий к ховерингу третьего типа у насекомых.
Регулирование длин телескопических тяг 9 осуществляется резьбовой крышкой 17 и резьбовым соединением 18: при недостаточной длине оси 10 для принятия крылом вертикального положения на махе вниз нужно приподнять секцию 11 над корпусом 1 посредством резьбового соединения 18. Если ось 10 получилась длиннее, и плоскость крыла не доходит до горизонтального положения на махе вверх, следует завернуть крышку 17 в секцию 11. В противном случае - наоборот.
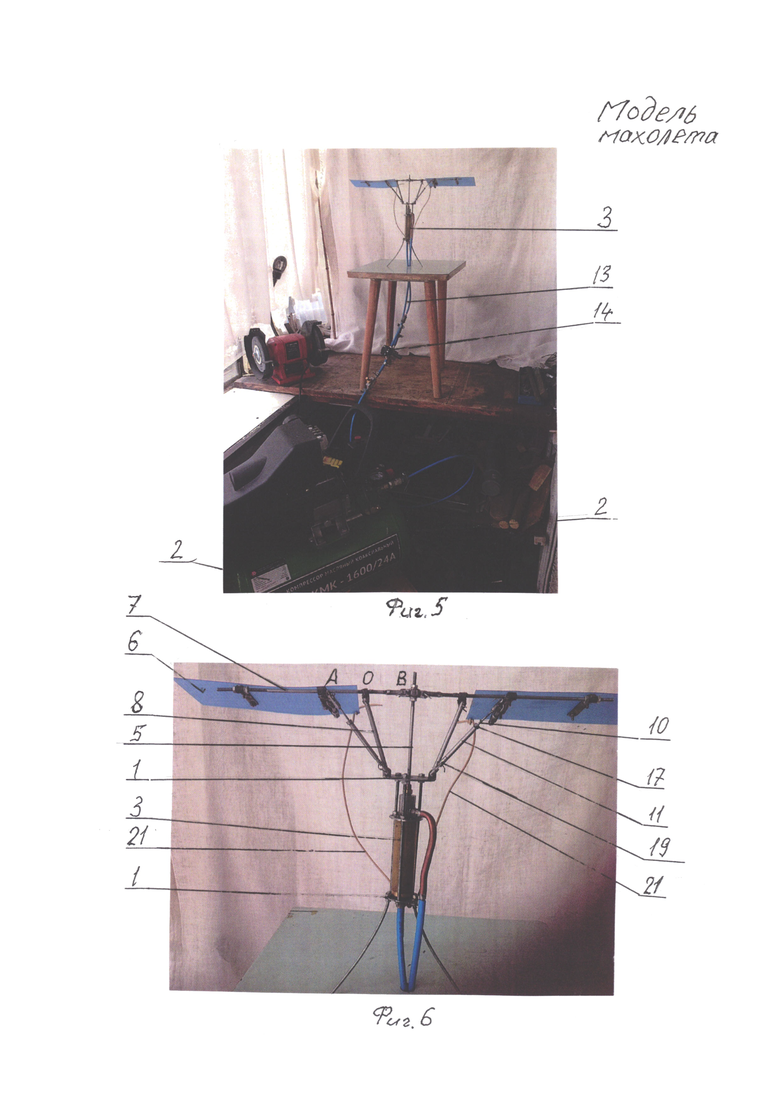
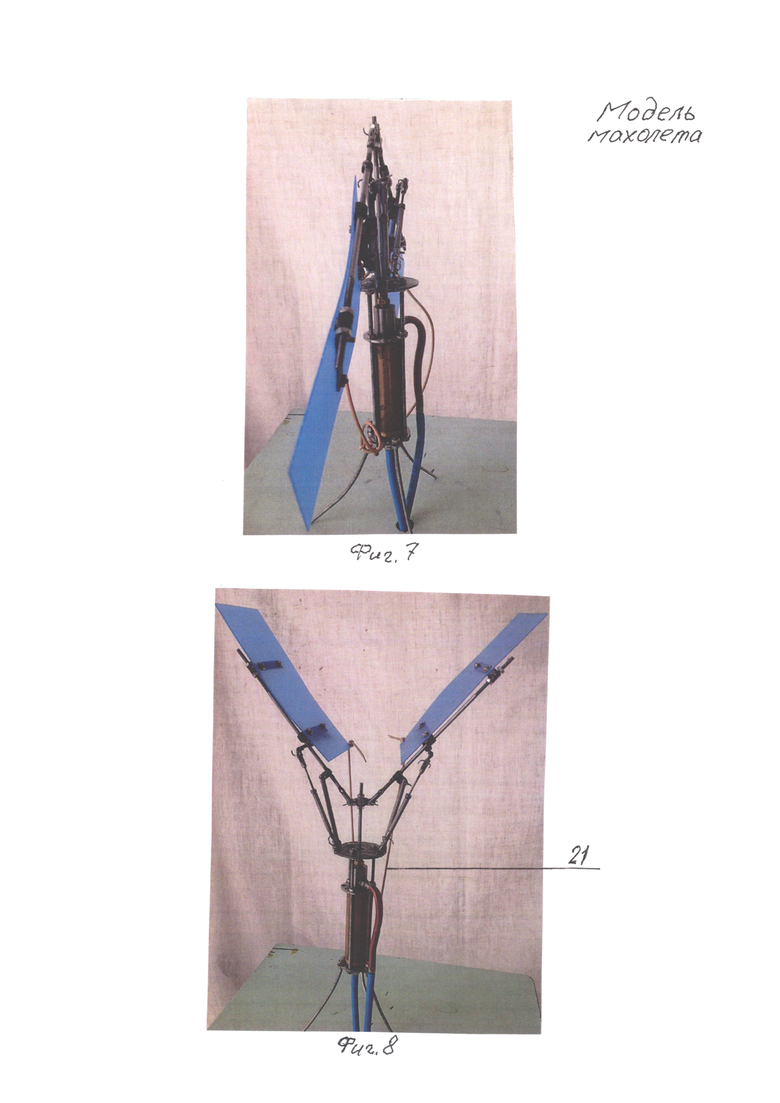
Возможность реализации данного технического решения подтверждена моделью. Фиг. 5, 6, 7, 8 - фотографии модели махолета: фиг. 5 - общий вид установки для испытания действия крыльев модели; фиг. 6 - среднее положение крыльев модели, вид спереди; фиг 7 - положение крыльев при махе вниз, вид сбоку; фиг. 8 - положение крыльев при махе вверх, вид спереди. На фотографиях те же обозначения, что и на фиг. 1, 2, 3. Поз. 21, фиг. 6, - гибкие нити, удерживающие плоскости крыльев модели от чрезмерного их заноса вверх при повороте вокруг лонжеронов на махе вверх.
Проведем сравнительную оценку подъемной силы для транспортного средства-прототипа и заявляемого махолета. Рассмотрим крыло транспортного средства-прототипа. Для крыльев, машущих без ховеринга, можно применить формулу:

где N - подъемная сила крыльев;
CN - коэффициент подъемной силы;
 - плотность воздуха;
- плотность воздуха;
S - площадь крыльев; в данном случае надо брать площадь максимальной проекции крыльев на горизонтальную поверхность при их расхождении от продольной оси транспортного средства;
V - скорость крыла на траектории.
(Тихонравов М.К. Полет птиц и машины с машущими крыльями. - М: Оборонгиз, 1949, с. 72).
Скорость крыла V на траектории складывается из горизонтальной Vx и вертикальной Vy скоростей, так что вектор результирующей силы найдется по известному правилу параллелограмма:
Обычно скорость Vx, равная горизонтальной скорости полета машущекрылого аппарата, в несколько раз превышает Vy, поэтому можно принять V≈Vx. Тогда выражение (1) примет вид:

(Там же).
Рассмотрим крыло заявляемого махолета. Для крыла, машущего в режиме ховеринга при висении на месте, получена формула:

где R - погонная аэродинамическая сила, то есть сила, приходящая на единицу длины крыла; в данном случае она совпадает с погонной подъемной силой;
CR - коэффициент силы R;
- плотность воздуха;
υ - скорость крыла при его движении вертикально вниз;
с - скорость звука;
b - хорда крыла
(Элементарная теория машущего полета. Ю.И. Лобановский - http://www.synerjetics.ru/article/flapping_flight.pdf).
Чтобы получить полную подъемную силу, надо выражение (3) умножить на длину крыльев, за которую можно приблизительно принять размах крыльев. Предположим для простоты, что крылья прямоугольные, то есть хорда постоянна по размаху крыла. Тогда мы можем написать:

где Y - подъемная сила, развиваемая крыльями махолета при висении на месте;
где L - размах крыльев махолета;
S=bL - площадь крыльев махолета, вычисляемая, как площадь прямоугольника; примем при сравнении, что она равна площади крыльев транспортного средства.
Чтобы привести формулу (4) к режиму поступательного горизонтального полета, когда поток воздуха не перпендикулярен плоскости крыла, применим формулу Рэли для обтекания пластинки жидкостью под углом:

где p - давление на пластинке при обтекании ее жидкостью под углом;
р90 - давление на пластинке при обтекании потоком, перпендикулярным ее плоскости;
λ - угол между потоком и плоскостью пластинки;
ϕ(λ) - величина сомножителя при р90.
(Голубев В.В. Теория крыла аэроплана в плоскопараллельном потоке. Изд. 2-е. М., Л. ГОНТИ НКТП СССР, Ред. технико-теорет. лит. 1938. С. 203).
Произведение  в выражении (4) - это перепад давления на крыле при его махе вниз с углом атаки в 90° (Элементарная теория машущего полета. Ю.И. Лобановский - http://www.synerjetics.ru/article/flapping_flight.pdf), то есть это как р90 в формуле Рэли. Если угол атаки при махе вниз не равен 90°, что происходит при поступательном горизонтальном полете махолета, то в выражение (4) для подъемной силы надо вводить множитель ϕ(λ), как в формуле Рэли:
в выражении (4) - это перепад давления на крыле при его махе вниз с углом атаки в 90° (Элементарная теория машущего полета. Ю.И. Лобановский - http://www.synerjetics.ru/article/flapping_flight.pdf), то есть это как р90 в формуле Рэли. Если угол атаки при махе вниз не равен 90°, что происходит при поступательном горизонтальном полете махолета, то в выражение (4) для подъемной силы надо вводить множитель ϕ(λ), как в формуле Рэли:

где Y' - подъемная сила заявляемого махолета. Сравним ее с подъемной силой прототипа, для этого разделим (6) на (2):

Вычислим отдельные сомножители этого выражения.
Так как величина ϕ(λ) зависит от угла обтекания (атаки) λ, который для заявляемого махолета колеблется от 90° до 0, то примем среднее значение этой величины за взмах, где-то в районе угла в 45°. В таблице (Голубев В.В., с. 203) есть значения для 40° (0,764) и для 50° (0,584), возьмем ϕ(λ)=0,584.
Для коэффициента CR получено выражение

где ξ=0,96 - коэффициент сопротивления пластинки;
η=0,9 - поправочный коэффициент;
(Элементарная теория машущего полета. Ю.И. Лобановский - http://www.synerjetics.ru/article/flapping_ilight.pdf).
Подставляя эти значения и число π=0,14 в (8), получим:

Величина (c/Vx) в выражении (7) представляет собой отношение скорости звука к горизонтальной скорости, развиваемой транспортным средством. Последнюю примем, как для крупных природных орнитоптеров - птиц: Vх=20-30 м/сек (Тихонравов М.К. Полет птиц и машины с машущими крыльями. - М.: Оборонгиз, 1949, с. 48). Возьмем Vx=30 м/сек; скорость звука с=340 м/сек (Справочник по физике), тогда (c/Vx)=340/30=11,3.
Для коэффициента подъемной силы CN М.К. Тихонравовым получено значение, вычисленное им для природного орнитоптера - голубя, равное 0,65 (Тихонравов М.К., с. 77); примем с учетом погрешностей вычисления CN=0,7-1,0.
Отношение (Vx/υ) - это отношение горизонтальной скорости крыла транспортного средства к вертикальной скорости крыла махолета. Последнюю при сравнении примем равной вертикальной скорости крыла транспортного средства, а она, как отмечалось выше, меньше горизонтальной скорости в несколько раз. Вычисления, проведенные автором по данным таблиц общих сведений о птицах, частот махания и скоростей полета, приведенных в цитируемой работе у М.К. Тихонравова на страницах 9-19, 45, 48-49, позволяют принять это отношение равным: Vx/υ=Vx/Vy=3. Подставим вычисленные сомножители в выражение (7), получим:

Вывод: ожидаемое повышение подъемной силы на крыльях заявляемого махолета по сравнению с прототипом где-то в районе 50-100%. То есть задача постройки махолета, крылья которого создают повышенную подъемную силу за счет махания ими в режиме, близком к ховерингу третьего типа, решаема.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОЛЕТ | 2016 |
|
RU2659357C2 |
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| МАХОЛЕТ | 2009 |
|
RU2412084C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с машущими крыльями. Махолет содержит корпус, силовую установку для привода крыльев, включающую жестко прикрепленный к корпусу цилиндр с поршнем, шток которого шарнирно соединен с крыльями. Крылья выполнены по типу крыльев насекомых эластичными, с жесткими передними ведущими кромками-лонжеронами и с возможностью колебания вокруг этих кромок-лонжеронов. Лонжероны шарнирно соединены через подкосы крыльев с корпусом. На корпусе установлены две телескопические тяги, каждая из которых состоит из оси и полой секции. Телескопические тяги шарнирно соединены каждая с корпусом и лонжероном своего крыла. Обеспечивается увеличение подъемной силы крыла. 8 ил.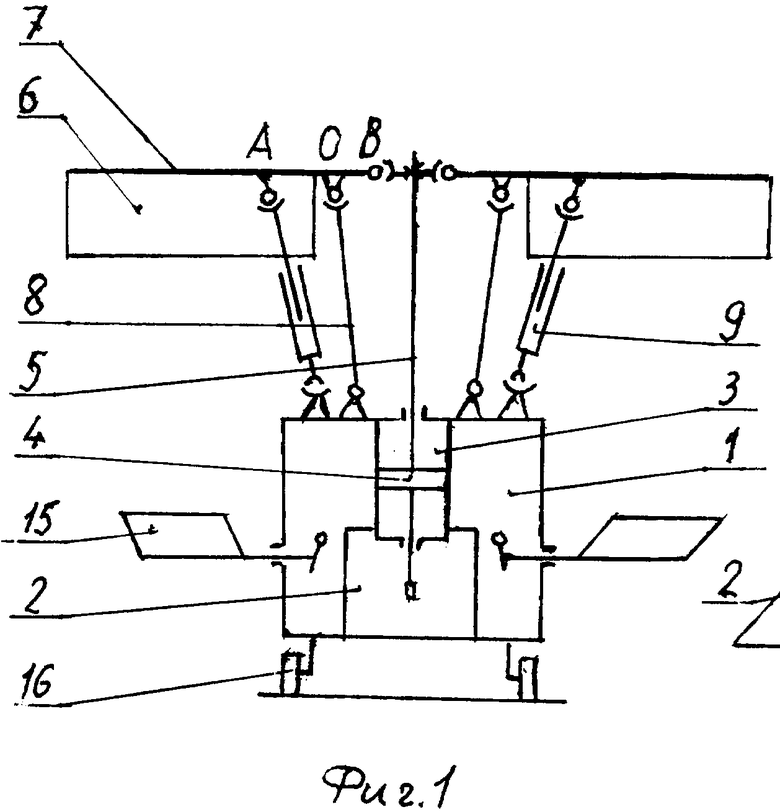
Махолет, содержащий корпус, силовую установку, включающую жестко прикрепленный к корпусу цилиндр с поршнем, шток которого шарнирно соединен с крыльями, выполненными по типу крыльев насекомых эластичными, с передними жесткими ведущими кромками и с возможностью вращения вокруг этих кромок, которые шарнирно связаны подкосами с корпусом, отличающийся тем, что на корпусе шарнирно установлены две телескопические тяги, шарнирно связанные каждая с жесткой передней ведущей кромкой своего крыла.
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| ДЕКОДИРОВАНИЕ МНОГОСЛОЙНОГО ВИДЕОПОТОКА | 2013 |
|
RU2610286C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| ПРИВОД ДВИЖЕНИЯ КРЫЛА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1998 |
|
RU2151715C1 |

