Изобретение относится к области автоматического управления и предназначено для систем с широтно-импульсным регулированием, оно может найти применение в управляемых источниках вторичного питания.
Известен способ управления преобразователем постоянного напряжения с двухзвенным фильтром, заключающийся в релейном управлении на основе скользящих режимов [1].
Недостаток известного способа заключается в том, что устойчивая работа преобразователя возможна в ограниченном диапазоне изменения параметров источника питания и нагрузки, сложности его реализации, так как требуется измерение большого количества координат системы и определение производной тока нагрузки, кроме того, при релейном способе управления частота коммутации ключевых элементов преобразователя меняется в широком диапазоне, что ухудшает электромагнитную совместимость аппаратуры.
Наиболее близким техническим решением является способ управления преобразователями напряжения, основанный на широтно-импульсной модуляции напряжения питания и заключающийся в том, что переключение ключевого элемента преобразователя осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки, сигнала пульсирующей составляющей входного тока фильтра и сигнала развертки, сигнал ошибки вычисляют как разность выходного сигнала и сигнала задания, а сигнал развертки формируют из прогнозируемых на текущий момент коммутации значений пульсирующей составляющей входного тока фильтра с противоположным знаком [2].
Известный способ управления основан на прогнозируемости приращения тока дросселя фильтра, поскольку
где iC - ток конденсатора фильтра, то при подчиненном регулировании тока  по уравнению
по уравнению  обеспечивается апериодический характер переходного процесса по выходу х, так как вследствие отрицательной знакоопределенности отношения
обеспечивается апериодический характер переходного процесса по выходу х, так как вследствие отрицательной знакоопределенности отношения
где Тд=km/k, ошибка x в переходном процессе только уменьшается, и во всем диапазоне регулирования в установившихся режимах в момент коммутации выполняется условие x(tк)=0 за счет того, что сигнал развертки к моменту коммутации равен прогнозируемому значению пульсирующей составляющей тока дросселя фильтра с противоположным знаком  .
.
Недостатком известного способа является то, что он не предназначен для управления преобразователями напряжения с двухзвенным фильтром.
Цель технического решения - расширение функциональных возможностей способа для управления преобразователями напряжения с двухзвенным фильтром.
Поставленная цель достигается за счет того, что в способе управления преобразователями постоянного напряжения, основанном на широтно-импульсной модуляции напряжения питания и заключающемся в том, что измеряют пульсирующую составляющую входного тока фильтра как разность входного тока фильтра и тока нагрузки, формируют сигнал развертки из прогнозируемых на текущий момент коммутации значений пульсирующей составляющей входного тока фильтра с противоположным знаком, формируют управляющий сигнал из суммы сигнала ошибки, сигнала пульсирующей составляющей входного тока фильтра и сигнала развертки, переключение ключевого элемента преобразователя осуществляют синхронизирующим и управляющим сигналами, дополнительно определяют сигнал рассогласования пропорциональный переменной составляющей напряжения между выходом первого звена фильтра и выходом преобразователя, а сигнал ошибки вычисляют как разность между выходным напряжением преобразователя и напряжением задания с суммированием сигнала рассогласования.
Сущность изобретения заключается в том, что формирование сигнала ошибки с учетом переменной составляющей напряжения между выходом первого звена фильтра и выходом преобразователя позволяет эффективно демпфировать колебания как между звеньями фильтра, так и колебания выходного напряжения преобразователя. При этом в установившемся режиме, при отсутствии колебаний сигнал ошибки определяется разностью выходного напряжения преобразователя и напряжением задания.
Предлагаемый способ реализует закон управления вида

где u1 - выходное напряжение первого звена фильтра; u2 - выходное напряжение второго звена фильтра, являющееся выходным напряжением преобразователя; uоп - напряжение задания;  - пульсирующая составляющая входного тока фильтра; km - коэффициент связи; Yp - сигнал развертки; tp=T{t/T} - временная координата для формирования сигнала развертки ({α} - дробная часть числа α); Т - длительность периода коммутации; VT - состояние ключевого элемента (при модуляции заднего фронта θ=1, при модуляции переднего фронта θ=0); tк - момент коммутации, определяется при модуляции заднего фронта корнем уравнения F=0 при
- пульсирующая составляющая входного тока фильтра; km - коэффициент связи; Yp - сигнал развертки; tp=T{t/T} - временная координата для формирования сигнала развертки ({α} - дробная часть числа α); Т - длительность периода коммутации; VT - состояние ключевого элемента (при модуляции заднего фронта θ=1, при модуляции переднего фронта θ=0); tк - момент коммутации, определяется при модуляции заднего фронта корнем уравнения F=0 при  , а при модуляции переднего фронта - корнем уравнения F=0 при
, а при модуляции переднего фронта - корнем уравнения F=0 при  .
.
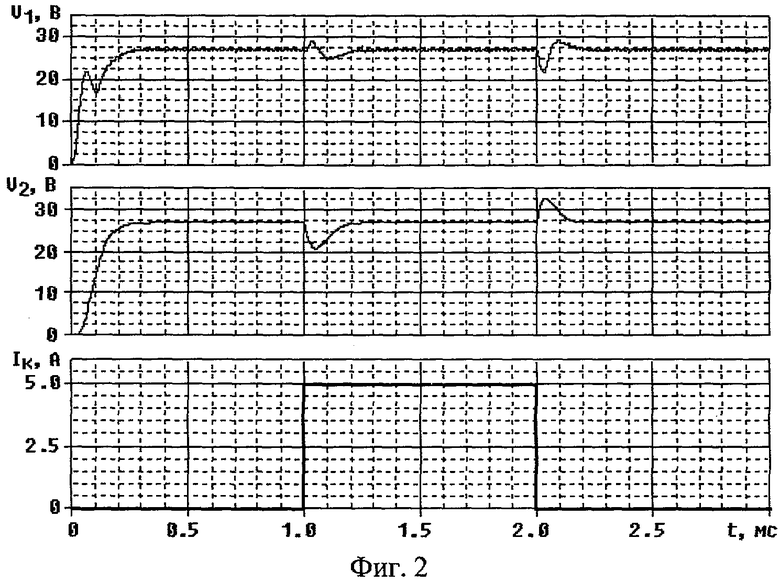
На фиг.1 приведена схема преобразователя напряжения с двухзвенным фильтром и регулятором, реализующим предлагаемый способ управления, на фиг.2 - диаграммы выходного напряжения первого и второго звена фильтра при включении с нулевых начальных условий на сопротивление нагрузки 2,7 Ом с последующей коммутацией нагрузки в 5 ампер.
Преобразователь напряжения с двухзвенным фильтром и регулятором, реализующим предлагаемый способ управления (фиг.1), состоит из двух однозвенных LC-фильтров 1 и 2, ключевого элемента 3, нагрузки 4, двух датчиков тока 5 и 6, узла вычитания 7, блока вычисления сигнала ошибки 8, генератора пилообразного напряжения 9, узла формирования управляющего сигнала 10 и RS-триггера 11. Вход ключевого элемента 3 соединен с шиной напряжения питания Uп, выход ключевого элемента 3 соединена с входом LC-фильтра 1, выход LC-фильтра 1 соединен с шиной U1 и входном LC-фильтра 2, выход LC-фильтра 2 соединен с шиной U2 и с нагрузкой 4, датчик тока 5 включен во входную цепь LC-фильтра 1, датчик тока 6 включен в цепь нагрузки 4, входы узла вычитания 7 соединены с выходами датчиков тока 5 и 6, первый вход блока вычисления сигнала ошибки 8 соединен с шиной задания напряжения Uоп, второй вход блока вычисления сигнала ошибки 8 соединен шиной U2, третий вход блока вычисления сигнала ошибки 8 соединен с шиной U1, первый вход генератора пилообразных напряжений 9 соединен с шиной U1, второй вход генератора пилообразных напряжений 9 соединен с шиной Uп, третий вход генератора пилообразных напряжений 9 соединен с шиной временной координаты tp, генератор пилообразных напряжений 9 имеет два выхода, первый вход узла формирования управляющего сигнала 10 соединен с выходом узла вычитания 7, второй вход узла формирования управляющего сигнала 10 соединен с выходом блока вычисления сигнала ошибки 8, третий вход узла формирования управляющего сигнала 10 соединен с первым выходом генератора пилообразных напряжений 9, входы RS-триггера 11 соединены с выходом узла формирования управляющего сигнала 10 и со вторым выходом генератора пилообразных напряжений 9, выход RS-триггера 11 соединен с управляющим входом ключевого элемента 3.
На выходе датчика тока 5 формируется сигнал i, равный входному току LC-фильтра 1, на выходе датчика тока 6 формируется сигнал iн, равный току нагрузки 4, на выходе узла вычитания 7 в соответствии с выражением i-iн формируется сигнал  , равный пульсирующей составляющей тока дросселя LC-фильтра 1, на выходе блока вычисления сигнала ошибки 8 формируется сигнал ошибки x в соответствии с выражением u1+α(u1-u2)-uоп, на первом выходе генератора пилообразного напряжения 9 формируется сигнал пилообразного напряжения Yp, который к моменту коммутации ключевого элемента 3 равен пульсирующей составляющей тока дросселя LC-фильтра 1 [2], на втором выходе генератора пилообразного напряжения 9 формируется сигнал t0 синхронизации, на выходе узла формирования управляющего сигнала 10 формируется сигнал F в соответствии с выражением
, равный пульсирующей составляющей тока дросселя LC-фильтра 1, на выходе блока вычисления сигнала ошибки 8 формируется сигнал ошибки x в соответствии с выражением u1+α(u1-u2)-uоп, на первом выходе генератора пилообразного напряжения 9 формируется сигнал пилообразного напряжения Yp, который к моменту коммутации ключевого элемента 3 равен пульсирующей составляющей тока дросселя LC-фильтра 1 [2], на втором выходе генератора пилообразного напряжения 9 формируется сигнал t0 синхронизации, на выходе узла формирования управляющего сигнала 10 формируется сигнал F в соответствии с выражением  , на выходе RS-триггера 11 формируется сигнал VT, который управляет переключением ключевого элемента 3 в соответствии с законом управления (1).
, на выходе RS-триггера 11 формируется сигнал VT, который управляет переключением ключевого элемента 3 в соответствии с законом управления (1).
Диаграммы выходных напряжений первого и второго звена фильтра при включении с нулевых начальных условий на сопротивление нагрузки 2,7 Ом с последующей коммутацией нагрузки в 5 А (фиг.2) преобразователя с двухзвенным фильтром и параметрами: напряжение питания Uп=50 В; заданное выходное напряжение Uоп=27 В; частоте коммутации ключевого элемента f=50 кГц; индуктивности и емкости первого звена фильтра L1=100 мкГ, C1=20 мкФ; индуктивности и емкости второго звена фильтра L1=100 мкГ, С1=20 мкФ; коэффициентах km=1,3 и α=1,14 показывают, что предложенный способ управления эффективно демпфирует колебания между звеньями фильтра, а также колебания выходного напряжения при высоком быстродействии (длительность переходного процесса не превышает 0,3 мс).
ЛИТЕРАТУРА
1. Озеров Л.А., Разнополов О.А., Штепсель Ю.Б. Синтез управления импульсным стабилизатором с двухзвенным фильтром на основе скользящих режимов // Электричество. 1990. №7. С.77-79.
2. Казанцев Ю.М., Лекарев А.Ф., Тихонов Е.Г. Синтез управления следящими инверторами систем электропитания // Приборы и системы. Управление, контроль, диагностика. 2004. №6. С 20-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2475805C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2447478C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СЛЕДЯЩИЙ ИНВЕРТОР С ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2001 |
|
RU2202144C2 |
Использование: в области автоматического управления. Технический результат заключается в расширении функциональных возможностей. Способ заключается в том, что формирование сигнала ошибки с учетом переменной составляющей напряжения между выходом первого звена фильтра и выходом преобразователя позволяет эффективно демпфировать колебания как между звеньями фильтра, так и колебания выходного напряжения преобразователя. При этом в установившемся режиме, при отсутствии колебаний сигнал ошибки определяется разностью выходного напряжения преобразователя и напряжением задания. 2 ил.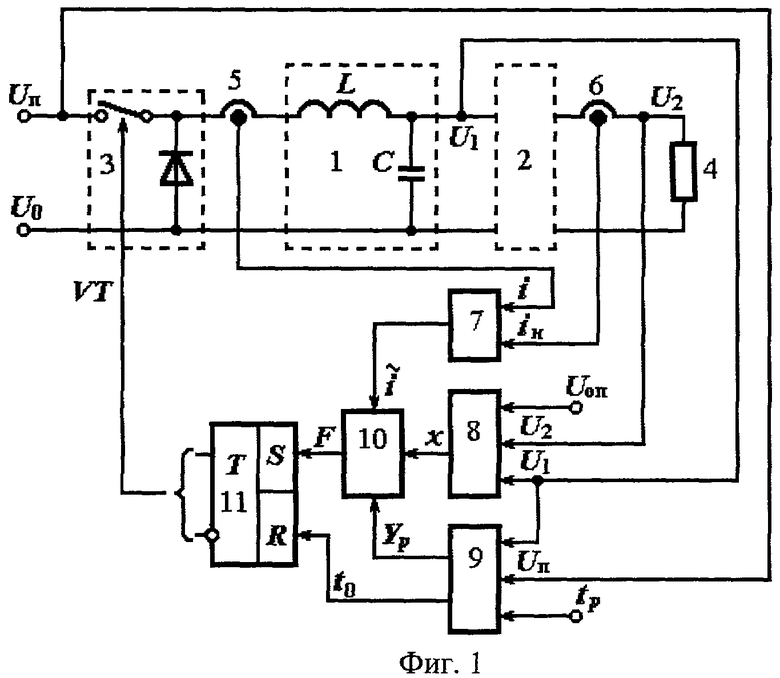
Способ управления преобразователем постоянного напряжения, основанный на широтно-импульсной модуляции напряжения питания и заключающийся в том, что измеряют пульсирующую составляющую входного тока фильтра как разность входного тока фильтра и тока нагрузки, формируют сигнал развертки из прогнозируемых на текущий момент коммутации значений пульсирующей составляющей входного тока фильтра с противоположным знаком, формируют управляющий сигнал из суммы сигнала ошибки, сигнала пульсирующей составляющей входного тока фильтра и сигнала развертки, переключение ключевого элемента преобразователя осуществляют синхронизирующим и управляющим сигналами, отличающийся тем, что дополнительно определяют сигнал рассогласования, пропорциональный переменной составляющей напряжения между выходом первого звена фильтра и выходом преобразователя, а сигнал ошибки вычисляют как разность между выходным напряжением преобразователя и напряжением задания с суммированием сигнала рассогласования.
| КАЗАНЦЕВ Ю.М | |||
| и др | |||
| Синтез управления следящими инверторами систем электропитания | |||
| Приборы и системы | |||
| Управление, контроль, диагностика | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ ПОВЫШАЮЩЕГО ТИПА | 2005 |
|
RU2309448C2 |
| DE 19530064 A1, 20.02.1997. | |||

