Заявляемое изобретение относится к автоматическому управлению и предназначено для систем с широтно-импульсным регулированием, оно может найти широкое применение в управляемых источниках вторичного питания.
Известны преобразователи напряжения повышающего типа, содержащие накопительный дроссель, ключевой элемент, диод и конденсатор фильтра. Известен способ управления такими преобразователями, основанный на коммутации ключевого элемента импульсным сигналом с коэффициентом заполнения определяемым сигналом ошибки [1].
Недостатком этого способа управления является зависимость между сигналом ошибки и коэффициентом заполнения импульса.
Известен способ управления с широтно-импульсным регулированием, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют синхронизирующий сигнал, сигнал, пропорциональный пульсирующей составляющей тока дросселя, сигнал развертки, пропорциональный сумме периодического сигнала и сигнала смещения. Периодический сигнал формируют из прогнозируемого для интервала после коммутации ключевого элемента приращения тока дросселя, а сигнал смещения равный сумме средних за период синхронизации прогнозируемых приращений тока дросселя для интервалов до и после коммутации ключевого элемента. Управление преобразователем осуществляют управляющим и синхронизирующим сигналами. Управляющий сигнал формируют из суммы сигнала ошибки, сигнала, пропорционального пульсирующей составляющей тока дросселя, и сигнала развертки [2].
Известный способ может быть использован для управления преобразователем напряжения повышающего типа.
Недостаток известного способа заключается в сложности формирования сигнала развертки.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ управления преобразователем понижающего типа, в котором коммутацию ключевого элемента осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки, пульсирующей составляющей тока дросселя, периодического сигнала и сигнала смещения, периодический сигнал формируют пропорциональным текущему значению среднего за период коммутации значению напряжения питания, а сигнал смещения - пропорциональным произведению периода синхронизации на амплитуды напряжения, приложенного к дросселю после коммутации ключевого элемента [3].
В известном способе управления сигнал развертки прогнозирует значение пульсирующей составляющей тока дросселя на момент после коммутации переключателя, что обеспечивает его коммутацию при отсутствии статической ошибки и устойчивость управления в широком диапазоне задания параметров.
Цель предлагаемого изобретения состоит в расширении функциональных возможностей способа управления за счет его распространения на преобразователи повышающего типа.
Поставленная цель достигается тем, что коммутацию ключевого элемента повышающего преобразователя осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки, сигнала, пропорционального пульсирующей составляющей тока дросселя, периодического сигнала и сигнала смещения. Сигнал смещения формируют пропорциональным произведению периода синхронизации на амплитуду напряжения прилагаемого к дросселю после коммутации ключевого элемента, при этом периодический сигнал формируют пропорциональным текущему среднему за период коммутации значению выходного напряжения.
Сущность изобретения заключается в том, что в преобразователе повышающего типа ключевой элемент управляющий выходным напряжением замыкает цепь источника питания через накопительный дроссель с одновременным отключением цепи нагрузки от накопительного дросселя, при этом напряжения на накопительном дросселе на интервале до и после коммутации ключевого элемента соответственно равны Uвх-U1 и Uвх-U2, где Uвх - напряжение питания, U1, U2 - напряжения на выходе накопительного дросселя на интервалах до и после коммутации. При управлении задним фронтом модуляции имеем U1=0, U2=Uвых, а при управлении передним фронтом U1=Uвых, U2=0, где Uвых - выходное напряжение преобразователя. Поэтому предлагается закон управления вида



где X=Uвых-Uon - сигнал ошибки, формируется как разность между выходным сигналом системы и сигналом задания, km - коэффициент передачи,  - пульсирующая составляющая тока дросселя (разность между током дросселя и его средним за период коммутации значением), Yр - сигнал развертки, L - индуктивность дросселя, Tn - длительность периода синхронизации, tp=T{t/T} - временная координата для формирования сигнала развертки ({а} - дробная часть числа a), tk - моменты коммутации ключевого элемента, определяемые наименьшим положительным корнем уравнения F=0 при управлении задним фронтом модуляции и наименьшим по модулю отрицательным корнем уравнения F=0 при переднем фронте, VT(F,t) - состояние ключевого элемента (VT=1 на выходе дросселя напряжение U1, VT=0 на выходе дросселя напряжение U2).
- пульсирующая составляющая тока дросселя (разность между током дросселя и его средним за период коммутации значением), Yр - сигнал развертки, L - индуктивность дросселя, Tn - длительность периода синхронизации, tp=T{t/T} - временная координата для формирования сигнала развертки ({а} - дробная часть числа a), tk - моменты коммутации ключевого элемента, определяемые наименьшим положительным корнем уравнения F=0 при управлении задним фронтом модуляции и наименьшим по модулю отрицательным корнем уравнения F=0 при переднем фронте, VT(F,t) - состояние ключевого элемента (VT=1 на выходе дросселя напряжение U1, VT=0 на выходе дросселя напряжение U2).
На чертеже приведена схема устройства, реализующего предложенный способ управления.
Устройство содержит: ключевой элемент 1, накопительный дроссель 2, датчик тока 3, узел сравнения 4, блок формирования управляющего сигнала 5, RS-триггер 6, масштабный усилитель 7 и интегратор 8. Один вывод ключевого элемента 1 соединен с выходом накопительного дросселя 2 через датчик тока 3 и выходной шиной Uвых через диод D, второй - с выходной шиной U0, управляющий вход ключевого элемента 1 соединен с выходом RS-триггера 6, общий вывод переключателя 1. Узел сравнения 4 имеет два входа - прямой и инверсный, прямой вход узла сравнения 4 соединен с выходной шиной устройства Uвых, инверсный вход узла сравнения 4 соединен с шиной задания Uon. Блок формирования управляющего сигнала 5 имеет четыре входа. Первый вход блока формирования управляющего сигнала 5 соединен с выходом датчика тока 3, второй вход блока формирования управляющего сигнала 5 соединен с выходом узла сравнения 4, третий вход блока формирования управляющего сигнала 5 соединен с выходом масштабного усилителя 7, четвертый вход блока формирования управляющего сигнала 5 соединен с выходом интегратора 8, выход блока формирования управляющего сигнала 5 соединен с S-входом RS-триггера 6, R-вход RS-триггера 6 соединен с шиной синхронизации Uсинх, аналоговый вход узла интегрирования 8 соединен с выходной шиной Uвых, управляющий вход интегратора 8 соединен с шиной синхронизации Uсинх. Масштабный усилитель 7 имеет два входа, первый вход масштабного усилителя 7 соединен с шиной питания Uвх, второй вход масштабного усилителя 7 соединен с выходной шиной устройства Uвых.
Устройство работает следующим образом. На выходе узла сравнения 4 формируется сигнал ошибки Х=Uвых-Uon, на выходе датчика тока 3 формируется сигнал , пропорциональный пульсирующей составляющей тока дросселя 2; на выходе узла интегрирования 8 формируется периодический сигнал,
прогнозирующий приращение тока дросселя 2 на момент после коммутации переключателя 1; на выходе масштабного усилителя 7 формируется сигнал смещения  Сумма сигналов Y′p, Y′′p равна сигналу развертки Yp по уравнению (1), при этом на выходе RS-триггера 6 из выходного сигнала F блока формирования управляющего сигнала 5 и сигнала синхронизации Uсинх формируется управляющий сигнал VT, который управляет состоянием переключателя 1 в соответствии с законом управления (1).
Сумма сигналов Y′p, Y′′p равна сигналу развертки Yp по уравнению (1), при этом на выходе RS-триггера 6 из выходного сигнала F блока формирования управляющего сигнала 5 и сигнала синхронизации Uсинх формируется управляющий сигнал VT, который управляет состоянием переключателя 1 в соответствии с законом управления (1).
При управлении задним фронтом модуляции узел интегрирования 8 формирует периодический сигнал  масштабный усилитель 7 формирует сигнал смещения
масштабный усилитель 7 формирует сигнал смещения  сигнал VT формируется наименьшим положительным корнем уравнения F=0, соответственно ключевой элемент 1 включается при появлении синхроимпульса Uсинх и отключается при появлении сигнала VT.
сигнал VT формируется наименьшим положительным корнем уравнения F=0, соответственно ключевой элемент 1 включается при появлении синхроимпульса Uсинх и отключается при появлении сигнала VT.
При управлении передним фронтом модуляции узел интегрирования 8 формирует периодический сигнал  масштабный усилитель 7 не имеет второго входа и формирует сигнал смещения
масштабный усилитель 7 не имеет второго входа и формирует сигнал смещения  сигнал VT формируется наименьшим отрицательным корнем уравнения F=0, соответственно ключевой элемент 1 отключается при появлении синхроимпульса Uсинх и включается при появлении сигнала VT.
сигнал VT формируется наименьшим отрицательным корнем уравнения F=0, соответственно ключевой элемент 1 отключается при появлении синхроимпульса Uсинх и включается при появлении сигнала VT.
Литература
1. Семенов Б.Ю. Силовая электроника для любителей и профессионалов. М.: Солон-Р, 2001.
2. Патент РФ №2156996, МПК7 G05F 1/56, опубл. 27.09.2000.
3. Патент РФ №2214618, МПК7 G05F 1/56, опубл. 20.10.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2197059C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2447478C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| МНОГОКАНАЛЬНЫЙ БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ УПРАВЛЯЕМОГО МНОГОФАЗНОГО ВЫПРЯМИТЕЛЯ | 2000 |
|
RU2185703C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2264689C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
Заявляемое изобретение относится к автоматическому управлению и предназначено для систем с широтно-импульсным регулированием, оно может найти широкое применение в управляемых источниках вторичного питания. Технический результат изобретения состоит в расширении функциональных возможностей способа управления за счет его распространения на преобразователи повышающего типа. Сущность изобретения заключается в том, что в преобразователе повышающего типа напряжения на накопительном дросселе на интервале до и после коммутации ключевого элемента соответственно равны Uвх-U1 и Uвх-U2, где Uвх - напряжение питания, U1, U2 - напряжения на выходе накопительного дросселя на интервалах до и после коммутации ключевого элемента. 1 ил.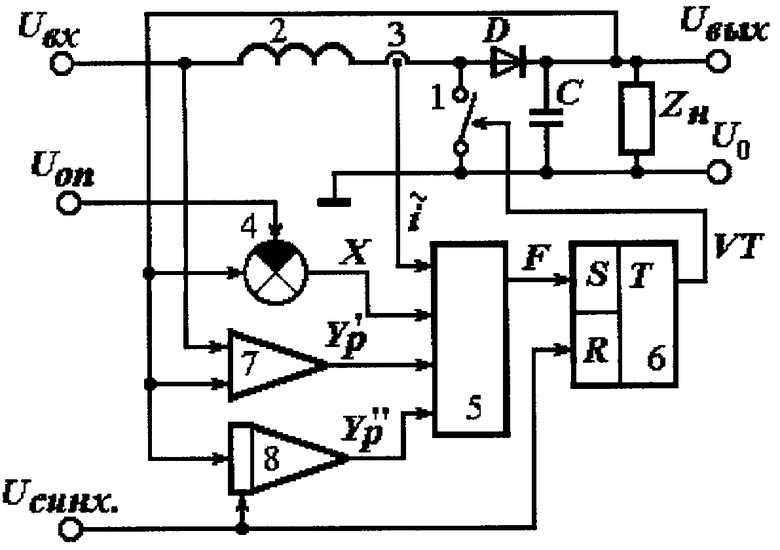
Способ управления преобразователем напряжения повышающего типа, заключающийся в том, что коммутацию ключевого элемента осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки, сигнала пропорционального пульсирующей составляющей тока дросселя, сигнала периодической развертки и сигнала смещения, пропорционального произведению периода синхронизации на амплитуду напряжения прилагаемого к дросселю после коммутации ключевого элемента, отличающийся тем, что периодический сигнал развертки формируют пропорциональным текущему среднему за период коммутации значению выходного напряжения преобразователя.
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| Контактное устройство тягового реле стартера | 1985 |
|
SU1272366A1 |

