Предлагаемое изобретение относится к электротехнике и предназначено для использования в источниках вторичного электропитания устройств радиотехники, автоматики и вычислительной техники.
Известен способ управления импульсным преобразователем постоянного напряжения, основанный на широтно-импульсной модуляции, заключающийся в том, что управляющий сигнал формируют как сумму сигнала рассогласования, сигнала тока дросселя и сигнала пилообразной развертки с постоянной амплитудой [1].
Недостатком известного способа управления является то, что устойчивая работа преобразователя возможна только в узком диапазоне изменения напряжения питания и тока нагрузки, кроме того, сигнал развертки не определяет состояния системы, поэтому изменение напряжения питания или тока нагрузки приводит к появлению статической ошибки.
Наиболее близким аналогом, выбранным в качестве прототипа, является способ управления импульсным преобразователем постоянного напряжения, основанный на широтно-импульсной модуляции, заключающийся в том, что вычисляют сигнал рассогласования как разность между выходным и заданным напряжением, определяют сигнал переменной составляющей тока дросселя, пропорциональный разности между током дросселя и током нагрузки, формируют спадающий до нуля пилообразный сигнал развертки с крутизной, пропорциональной половине расчетной крутизны тока дросселя для режима после коммутации ключевого элемента, управляющий сигнал формируют как сумму сигнала рассогласования, сигнала переменной составляющей тока дросселя и сигнала развертки [2].
Реализация известного способа управления обеспечивает в установившихся режимах работы коммутацию ключевого элемента при равенстве текущих значений сигнала развертки и сигнала переменной составляющей тока дросселя с противоположным знаком

Точность выполнение условия (1) определяет значение сигнала рассогласования в момент коммутации ключевого элемента и обеспечивает устойчивую работу преобразователя в широком диапазоне изменения напряжения питания и тока нагрузки.
Недостаток известного способа управления заключается в том, что изменение индуктивности дросселя от различных факторов (ток, температура, длительность эксплуатации) вызывает отклонение реальной крутизны тока дросселя от расчетной (по сигналу развертки), что приводит к появлению статической ошибки из-за появляющейся погрешности выполнения условия (1).
Для иллюстрации сказанного на фиг.1 приведены временные диаграммы сигнала переменной составляющей тока дросселя  и сигнала рассогласования x=Uн-Uоп при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в преобразователе напряжения с задним фронтом широтно-импульсной модуляции и параметрах Uп=50 В, Uоп=27 В, частота модуляции - 100 кГц, емкость выходного конденсатора С=300 мкФ, дроссель имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3 индуктивность, принятая для формирования сигнала развертки L=50 мкГн.
и сигнала рассогласования x=Uн-Uоп при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в преобразователе напряжения с задним фронтом широтно-импульсной модуляции и параметрах Uп=50 В, Uоп=27 В, частота модуляции - 100 кГц, емкость выходного конденсатора С=300 мкФ, дроссель имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3 индуктивность, принятая для формирования сигнала развертки L=50 мкГн.
Видно, что увеличение выходного тока преобразователя приводит к увеличению амплитуды пульсации переменной составляющей тока дросселя (вследствие уменьшения индуктивности дросселя от роста его тока) и к изменению статических значений сигнала рассогласования.
Цель предлагаемого изобретения состоит в адаптации импульсных преобразователей постоянного напряжения к нестабильности индуктивности дросселя.
Поставленная цель достигается тем, что в способе управления импульсным преобразователем постоянного напряжения, основанном на широтно-импульсной модуляции, заключающемся в том, что определяют сигнал рассогласования как разность между выходным сигналом и сигналом задания, формируют сигнал пропорциональный переменной составляющей тока дросселя и спадающий до нуля пилообразный сигнал развертки, крутизна которого пропорциональна половине расчетной крутизны тока дросселя для режима после коммутации ключевого элемента, управляющий сигнал формируют как сумму сигнала рассогласования, сигнала переменной составляющей тока дросселя и сигнала развертки, при этом сигнал переменной составляющей тока дросселя получают на выходе апериодического звена из сигнала, пропорционального напряжению на дросселе, с вычитанием из напряжения на конденсаторе контура обратной связи апериодического звена напряжения, пропорционального току нагрузки.
Работу преобразователя осуществляют в соответствии с законом управления

где F - управляющий сигнал; x=Uн-Uоп - сигнал рассогласования; Uн - выходной сигнал; Uоп - сигнал задания;  - сигнал переменной составляющей тока дросселя (расчетный); km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя [3]; Yp - сигнал развертки;
- сигнал переменной составляющей тока дросселя (расчетный); km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя [3]; Yp - сигнал развертки;  - напряжение на дросселе после коммутации ключевого элемента; tp=T{t/T} - временная координата для формирования сигнала развертки ({t/T} - дробная часть выражения t/T); T-длительность периода модуляции; tp=tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при
- напряжение на дросселе после коммутации ключевого элемента; tp=T{t/T} - временная координата для формирования сигнала развертки ({t/T} - дробная часть выражения t/T); T-длительность периода модуляции; tp=tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при  для модуляции заднего фронта импульса и при
для модуляции заднего фронта импульса и при  для модуляции переднего фронта импульса; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
для модуляции переднего фронта импульса; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
Сущность изобретения заключается в том, что на крутизну сигнала переменной составляющей тока дросселя, формируемого апериодическим звеном из сигнала, пропорционального напряжению на дросселе, не влияет изменение реальной индуктивности дросселя, что обеспечивает коммутацию ключевого элемента при равенстве значений сигнала переменной составляющей тока дросселя  и сигнала развертки
и сигнала развертки  с противоположным знаком.
с противоположным знаком.
На фиг.2 представлена схема импульсного преобразователя постоянного напряжения, реализующая предлагаемый способ управления; на фиг.3 представлена схема апериодического звена, формирующего переменную составляющую тока дросселя, на фиг.4 приведены временные диаграммы сигнала  переменной составляющей тока дросселя (расчетного) и сигнала рассогласования x=Uн-Uоп при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в понижающем преобразователе напряжения с законом управления (2).
переменной составляющей тока дросселя (расчетного) и сигнала рассогласования x=Uн-Uоп при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в понижающем преобразователе напряжения с законом управления (2).
Импульсный преобразователь постоянного напряжения (фиг.2) состоит из: ключевого элемента 1, диода 2, дросселя 3, выходного конденсатора 4, датчика 5 тока, датчика 6 напряжения, апериодического звена 7, узла 8 вычисления рассогласования, узла 9 формирования сигнала развертки, блока 10 формирования переключающего сигнала. Первый вывод ключевого элемента 1 соединен с шиной питания Uп, второй вывод ключевого элемента 1, первый вывод диода 2 и первый вывод дросселя 3 соединены между собой, второй вывод дросселя 3, первый вывод конденсатора 4 и соединены с выходной шиной Uн, датчик напряжения 6 подключен к выводам дросселя 3, датчик тока 5 включен в цепь нагрузки. На первый вход апериодического звена 7 с выхода датчика напряжения 6 поступает сигнал UL, пропорциональный напряжению на дросселе 3, на второй вход апериодического звена 7 с выхода датчика тока 5 поступает сигнал iн, пропорциональный току нагрузки, на входы узла 8 поступает сигнал задания с шины Uоп и сигнал с выходной шины преобразователя Uн, на входы узла 9 поступают сигналы с шины питания Uп и с выходной шины преобразователя Uн, входы блока 10 соединены с выходом апериодического звена 7, узлов 8 и 9, выход блока 10 соединен с управляющим входом ключевого элемента 1.
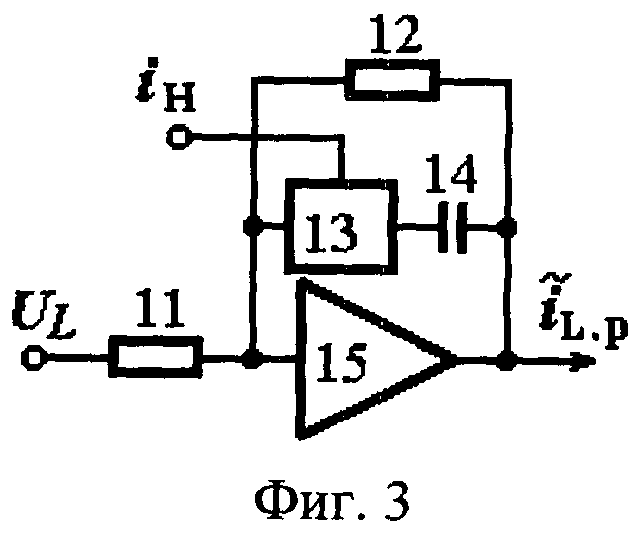
Апериодическое звено 7 (фиг.3) состоит из: двух резисторов 11, 12, управляемого источника напряжения 13, конденсатора 14 и операционного усилителя 15. Первый вход апериодического звена 7 соединен с первым выводом резистора 11, второй вывод резистора 11, первый вывод резистора 12, первый вывод управляемого источника напряжения 13 и вход операционного усилителя 15 соединены между собой, второй вывод управляемого источника напряжения 13 соединен с первым выводом конденсатора 14, управляющий вход управляемого источника напряжения 13 соединен со вторым входом апериодического звена 7, выход операционного усилителя 15, второй вывод конденсатора 14 и второй вывод резистора 12 соединены с выходом апериодического звена 7.
Импульсный преобразователь постоянного напряжения (фиг.2), реализующий закон управления (2), работает следующим образом.
На выходе апериодического звена 7 формируют сигнал  переменной составляющей тока дросселя 3.
переменной составляющей тока дросселя 3.
На выходе узла 8 формируют сигнал рассогласования x=Uн-Uоп, где Uн - сигнал с выходной шины преобразователя; Uоп - сигнал с шины задания.
На выходе узла 9 формируют сигнал развертки  ,
,
где  - напряжение, приложенное к дросселю 3 на участке после коммутации ключевого элемента 1, которое формируют из напряжения Uн на шине питания и напряжения UП на выходной шине по известным выражениям:
- напряжение, приложенное к дросселю 3 на участке после коммутации ключевого элемента 1, которое формируют из напряжения Uн на шине питания и напряжения UП на выходной шине по известным выражениям:
для понижающих преобразователей с задним фронтом модуляции

для понижающих преобразователей с передним фронтом модуляции
 .
.
На выходе блока 10 в соответствии с законом управления (2) формируют переключающий сигнал VT, управляющий состоянием ключевого элемента 1.
Реализацию заявленного формирования сигнала  переменной составляющей тока дросселя 3 осуществляют следующим образом. На первый вход апериодического звена 7 с датчика напряжения 6 поступает сигнал UL, пропорциональный напряжению на дросселе 3; на второй вход апериодического звена 7 с датчика тока 5 поступает сигнал iн, пропорциональный току нагрузки; на выходе апериодического звена 7 получают сигнал
переменной составляющей тока дросселя 3 осуществляют следующим образом. На первый вход апериодического звена 7 с датчика напряжения 6 поступает сигнал UL, пропорциональный напряжению на дросселе 3; на второй вход апериодического звена 7 с датчика тока 5 поступает сигнал iн, пропорциональный току нагрузки; на выходе апериодического звена 7 получают сигнал  переменной составляющей тока дросселя 3. При этом (см. фиг.3) на конденсаторе 14 получают сигнал
переменной составляющей тока дросселя 3. При этом (см. фиг.3) на конденсаторе 14 получают сигнал  расчетного значения тока дросселя, согласованный с сигналом iн (напряжение на управляемом источнике напряжения 13), на выходе операционного усилителя 15 получают сигнал
расчетного значения тока дросселя, согласованный с сигналом iн (напряжение на управляемом источнике напряжения 13), на выходе операционного усилителя 15 получают сигнал  переменной составляющей тока дросселя 3, при этом его переменная составляющая воспроизводит с постоянной времени, равной R11C14=L3, подаваемое на вход резистора 11 напряжение UL, а согласование сигнала
переменной составляющей тока дросселя 3, при этом его переменная составляющая воспроизводит с постоянной времени, равной R11C14=L3, подаваемое на вход резистора 11 напряжение UL, а согласование сигнала  с сигналом iн осуществляют с постоянной времени, равной R12C14, где R11, R12 - сопротивление резисторов 11, 12, L3 - индуктивность дросселя 3, C14 - емкость конденсатора 14.
с сигналом iн осуществляют с постоянной времени, равной R12C14, где R11, R12 - сопротивление резисторов 11, 12, L3 - индуктивность дросселя 3, C14 - емкость конденсатора 14.
Иллюстрация эффекта от реализации предложенного способа управления приведена на фиг.4 временными диаграммами сигнала  формируемого апериодическим звеном 7, и сигнала x при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в понижающем преобразователе напряжения с задним фронтом модуляции и параметрах Uп=50 В, Uоп=27 В, частота широтно-импульсной модуляции f-100 кГц, емкость выходного конденсатора 4 С4=300 мкФ, дроссель 3 имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3 индуктивность (принятая) L=50 мкГн, коэффициент пропорциональности km=0,03.
формируемого апериодическим звеном 7, и сигнала x при скачкообразном изменении тока нагрузки iн от 10 до 20 А и обратно в понижающем преобразователе напряжения с задним фронтом модуляции и параметрах Uп=50 В, Uоп=27 В, частота широтно-импульсной модуляции f-100 кГц, емкость выходного конденсатора 4 С4=300 мкФ, дроссель 3 имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3 индуктивность (принятая) L=50 мкГн, коэффициент пропорциональности km=0,03.
Видно, что увеличение тока нагрузки не приводит к увеличению амплитуды пульсации  , статическое значение сигнала рассогласования между выходным и заданным сигналами не меняется.
, статическое значение сигнала рассогласования между выходным и заданным сигналами не меняется.
Таким образом формирование сигнала переменной составляющей тока дросселя 3 апериодическим звеном 7 из напряжения на дросселе 3, вместо определяемого выражением  адаптирует импульсный преобразователь постоянного напряжения к нестабильности индуктивности дросселя 3.
адаптирует импульсный преобразователь постоянного напряжения к нестабильности индуктивности дросселя 3.
Список литературы
1. Условия устойчивости и коэффициент стабилизации импульсного стабилизатора с обратными связями по току и напряжению / Г.А.Белов, С.А.Кузьмин. - ЭТВА, вып.15. С.48-58: Радио и связь, 1984.
2. Патент РФ на изобретение №2337394, МПК7 G05F 1/56, опубл. 27.10.2008. Бюл. №30.
3. Казанцев Ю.М., Чернышев А.И., Лекарев А.Ф. Формирование квазискользящих процессов в импульсных преобразователях с ШИМ // Электричество. 1993. №12. С.45-49.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2021 |
|
RU2759688C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2008 |
|
RU2369895C1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2447478C1 |
| РЕЛЕЙНЫЙ СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2007 |
|
RU2345400C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2016 |
|
RU2630962C1 |


Изобретение относится к области электротехники и может быть использовано в источниках вторичного электропитания устройств радиотехники, автоматики и вычислительной техники. Техническим результатом является адаптация импульсных преобразователей постоянного напряжения к нестабильности индуктивности дросселя. Сущность способа управления импульсным преобразователем постоянного напряжения и устройства для его реализации заключается в том, что на крутизну сигнала переменной составляющей тока дросселя, формируемого апериодическим звеном из сигнала, пропорционального напряжению на дросселе, не влияет изменение реальной индуктивности дросселя, что обеспечивает коммутацию ключевого элемента при равенстве значений сигнала переменной составляющей тока дросселя  и сигнала развертки Yp(tк) с противоположным знаком. 2 н.п. ф-лы, 4 ил.
и сигнала развертки Yp(tк) с противоположным знаком. 2 н.п. ф-лы, 4 ил.
1. Способ управления преобразователем постоянного напряжения, основанный на широтно-импульсной модуляции, заключающийся в том, что определяют сигнал рассогласования как разность между выходным сигналом и сигналом задания, формируют сигнал, пропорциональный переменной составляющей тока дросселя, и спадающий до нуля сигнал развертки, крутизна которого пропорциональна половине расчетной крутизны тока дросселя для режима после коммутации ключевого элемента, управляющий сигнал формируют как сумму сигнала рассогласования, сигнала переменной составляющей тока дросселя и сигнала развертки, отличающийся тем, что сигнал переменной составляющей тока дросселя получают на выходе апериодического звена из сигнала, пропорционального напряжению на дросселе, с вычитанием из напряжения на конденсаторе контура обратной связи апериодического звена напряжения, пропорционального току нагрузки.
2. Устройство, содержащее преобразователь постоянного напряжения, состоящий из ключевого элемента, диода, дросселя и регулятора, состоящего из датчика тока, датчика напряжения, узла вычисления рассогласования, узла формирования сигнала развертки и блока формирования переключающего сигнала, для реализации способа управления по п.1, дополнительно содержит: апериодическое звено, состоящее из операционного усилителя, двух резисторов, конденсатора и управляемого источника напряжения, первый вывод первого резистора соединен с первым входом апериодического звена, второй вывод первого резистора, первый вывод второго резистора, первый вывод управляемого источника напряжения и вход операционного усилителя соединены между собой, второй вывод управляемого источника напряжения соединен с первым выводом конденсатора, управляющий вход управляемого источника напряжения соединен со вторым входом апериодического звена, второй вывод второго резистора, второй вывод конденсатора и выход операционного усилителя соединены с выходом апериодического звена, датчик напряжения подключен к выводам дросселя, выход датчика напряжения соединен с первым входом апериодического звена, датчик тока включен в цепь нагрузки, выход датчика тока соединен со вторым входом апериодического звена, выход апериодического звена представляет собой вывод сигнала переменной составляющей тока дросселя.
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ ПОВЫШАЮЩЕГО ТИПА | 2005 |
|
RU2309448C2 |
| RU 23830459 C1, 27.02.2010 | |||
| Устройство для управления преобразователем с широтно-импульсной модуляцией | 1987 |
|
SU1513595A1 |
| МОДЕЛЬ ПОРТФЕЛЯ РЕКЛАМЫ, КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ РИСКОМ РЕКЛАМЫ, ИСПОЛЬЗУЮЩАЯ МОДЕЛЬ ПОРТФЕЛЯ РЕКЛАМЫ, И СПОСОБ ПРИНЯТИЯ ИНВЕСТИЦИОННОГО РЕШЕНИЯ С ИСПОЛЬЗОВАНИЕМ ПОРТФЕЛЯ РЕКЛАМЫ | 2000 |
|
RU2233479C2 |
| DE 19530064 A1, 20.02.1997 | |||
| KR 1020010083573 A, 01.09.2001 | |||
| EP 1146620 B1, 17.10.2001 | |||
| Маховик П.М.Тривайло | 1987 |
|
SU1499004A1 |

