Изобретение относится к железнодорожному транспорту и может быть использовано в централизованных системах автоматического контроля подвижных объектов железнодорожного транспорта.
Известен способ идентификации подвижных составов, основанный на облучении пассивного датчика высокочастотным сигналом считывающего устройства при прохождении датчика мимо этого считывающего устройства. Возбужденный датчик выдает ответное кодовое сообщение, принимаемое и декодируемое считывающим устройством (патент США №4739328, кл. G 01 S 13/74, 1988).
Известен способ, в котором предлагается использовать включение-отключение высокочастотного сигнала считывающего устройства для исключения считывания пассивного датчика с соседнего подвижного состава (патент РФ №2191127 С1, 7 B 61 L 25/02).
Недостатком указанных способов является возможность ошибочной привязки датчика не к своему объекту или ложной привязки датчика соседнего состава в условиях неполной комплектации состава кодовыми датчиками (например, отказа одного из датчиков), из-за неучета протяженности зоны облучения кодового датчика СВЧ-сигналом считывающего устройства или изменения скорости и маневров идентифицируемого состава.
Способ идентификации (РФ №20009978 С1, 7 B 61 L 25/02), принятый за прототип, заключающийся в подсчете осей и подвижных единиц с измерением межосных расстояний. По измеренным на каждом контрольном пункте расстояниям между колесными парами формируется последовательность для каждого состава в порядке следования колесных пар всех подвижных единиц, запоминают их и при наличии на участке централизованного контроля нескольких составов с одинаковым количеством колесных пар и вагонов принимают решение об идентификации состава при совпадении последовательностей расстояний между колесными парами.
Недостатком данного способа является то, что здесь не решается собственно задача идентификации подвижной единицы состава в виду отсутствия идентификационного датчика и механизма привязки этого датчика к объекту. Кроме этого при частичной утрате информации, неоднозначности движения на одном из контрольных участков (элементы возвратного движения, замедления и т.п.) способ не обеспечивает заявленной цели.
Технический результат изобретения состоит в повышении надежности и достоверности идентификации подвижных средств, в том числе в условиях неполной информации от подвижного средства.
Технический результат достигается тем, что в способе идентификации подвижных составов, заключающемся в записи сигналов, сформированных в моменты пересечения колесными парами подвижного состава двух колесных датчиков, установленных на контрольном пункте и расположенных друг от друга по ходу движения подвижного состава на заданном фиксированном расстоянии, величина которого меньше минимально возможного межосевого расстояния, определении интервалов времени между сигналами от двух колесных датчиков, сформированных и записанных в момент пересечения этих датчиков колесной парой и интервалов времени, по величинам которых с учетом заданного фиксированного расстояния между колесными датчиками определяют межосное расстояние с последующим сравнением полученных данных с предварительно записанными данными в память измерительного средства, отличающимся тем, что при прохождении первым колесом состава первого по движению колесного датчика формируется импульс, который запускает таймер временных отметок, привязывая временную систему отсчета к движущемуся составу, предварительно в память измерительного средства записывают данные о структуре межосевых расстояний колесных пар, соответствующие определенным типам подвижных единиц и данные о подвижных единицах, соответствующие кодам, записанным в память пассивных приемоответчиков, установленных на подвижных единицах состава, облучение СВЧ-сигналом пассивных приемоответчиков производят с момента пересечения первого колесного датчика первой колесной парой подвижного состава, а считывание и запись кодового сигнала осуществляют при вхождении приемоответчика в зону облучения СВЧ-сигналом, при этом осуществляют запись момента входа приемоответчика в зону облучения СВЧ-сигналом и момента его выхода из этой зоны облучения, и по полученным данным определяют временное местоположение приемоответчика, по интервалам времени между записанными сигналами, сформированными в моменты пересечения колесных датчиков колесными парами, определяют скорость и направление движения подвижного состава и в случае пропуска в записи сигналов и/или наличия ложных сигналов, свидетельствующих об изменении скорости или направления движения, восстанавливают периодичность записанных сигналов и определяют межосные расстояния и сравнивают с предварительно записанными в память измерительного средства данными и по результатам сравнения определяют структуру и тип подвижных единиц и положение приемоответчиков, по которому устанавливают принадлежность приемоответчиков к подвижным единицам идентифицируемого состава и по результатам сравнения кодовых сигналов подтверждают тип подвижной единицы и ее принадлежность, определяют последовательность вхождения подвижных единиц в состав и фиксируют время прохода идентифицированного состава мимо контрольного пункта.
При прохождении первым колесом состава первого по движению колесного датчика формируется импульс, который запускает таймер временных отметок в считывающем устройстве, привязывая временную систему отсчета к движущемуся составу, и включает генератор СВЧ-сигнала и по мере прохождения состава мимо напольного считывающего устройства таймер считывателя формирует временные метки от импульсов колесных датчиков при прохождении над ними колес объектов, которые запоминаются вместе с номером колесного датчика в буфере для колесных датчиков, и временные метки входа кодовых датчиков в зону облученности антенной считывателя и выхода из нее, которые запоминаются вместе с декодированными идентификационными кодами датчиков, установленных на объектах состава, в буфере кодовых датчиков.
Эти данные от каждого контрольного пункта поступают по линии связи в устройство обработки первичной информации (возможно использование стандартного ПЭВМ со специализированным программным обеспечением), содержащее базы данных объектов датчиков.
Возможный вид полученных массивов данных (второй и третий столбец).
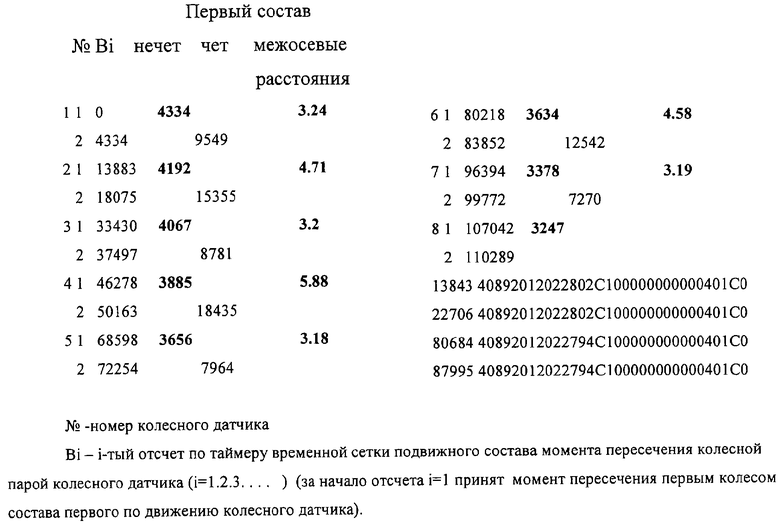

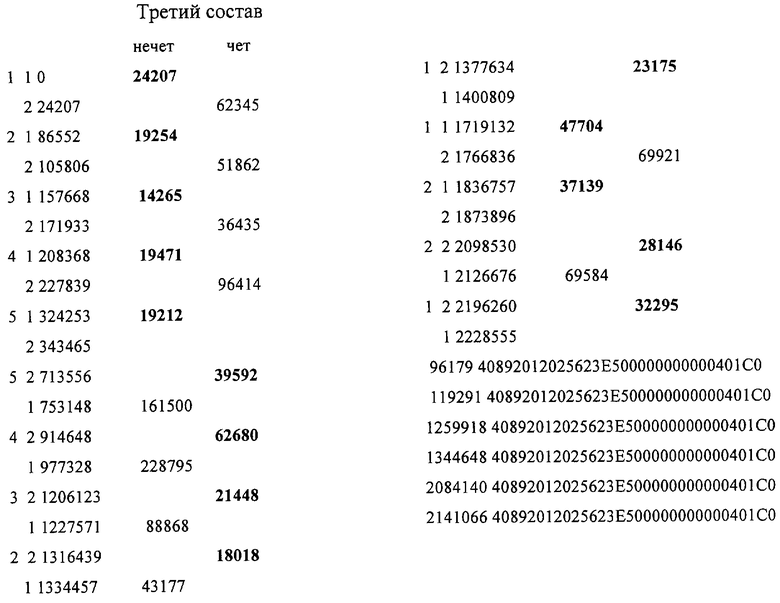
Цена кванта временных отметок таймера в массивах данных Δt=0,0000853 c.
В вычислительном устройстве:
1. Определяется временное положение кодового датчика по данным отсчетов входа и выхода кодового датчика из зоны облучения (например, как среднеарифметическое временных отсчетов кодового датчика):
Для первого массива
18274 40892012022802С100000000000401С0
84340 40892012022794С100000000000401С0
Для второго массива
17083 40892012636148D500000000000401С0
56710 40892066434648D400000000000402C0
140093 40892012636130Е100000000000401С0
Для третьего массива
107879 40892012025623Е500000000000401С0
1302283 40892012025623Е500000000000401С0
2112603 40892012025623Е500000000000401С0
2. Определяются интервалы регулярности чередования временных положений колесных пар объектов.
Например, проверкой условия «индекс позиции i=индексу позиции i+1»
В первой последовательности весь массив регулярный,
во второй - три массива регулярности,
в третьей - четыре массива регулярности.
3. Определяется направление движения колесных пар и интервалы сохраняемости направления скорости движения.
Проводится нумерация колесных пар объектов с учетом интервалов регулярности.
Определяется скорость движения на каждом интервале в предположении ее направления от отсчета колесного датчика нечетной строки (начиная с первой) к четной и от четной строки (начиная со второй) к нечетной.
Vi=Sб /(ti+1-ti), Sб - базовое расстояние между колесными датчиками (здесь
Sб=1 м),
ti - отсчет колесных датчиков в сек (ti=Bi*Δt), i=1,2,3,4...
Истинная последовательность временных отметок характеризуется гладким изменением скорости.
Проводится сравнение приращений эквивалентов скорости (разности приращений временных отсчетов на смежных участках массива, приведенные в четвертом и пятом столбцах).
Значение приращений с нечетным началом отсчета
Δiнеч.=(В2i-B2i-1),  где n - число приращений, i=1,2,3,4...
где n - число приращений, i=1,2,3,4...
С четным началом отсчета
Δiчет.=(B2i+1-В2i),  где n - число приращений, i=1,2,3,4...
где n - число приращений, i=1,2,3,4...
Для первого массива сравнение смежных приращений Δiнеч.<Δiчет. на всем массиве данных.
То есть массив начинается с нечетного номера и направление движения не меняется в процессе движения.
В последовательности отсчетов идентификационных данных отсутствуют совпадающие значения.
Для второго массива данных.
На первом интервале
Δiнеч.<Δiчет., то есть движение идет от первого колесного датчика ко второму.
На втором и третьем участке скорость сохраняет направление движения (Δiнеч.<Δiчет.).
При этом приращения с последующим совпадающим отсчетом дают резкое падение скорости (возрастание временного отрезка - 6814 вместо 3591), что не соответствует физике движения массивного инерционного объекта.
То есть имеет место ложный повторный отсчет в канале первого колесного датчика.
В последовательности отсчетов идентификационных данных отсутствуют совпадающие значения.
Для третьего массива данных.
На первом интервале Δiнеч.<Δiчет., то есть движение идет от первого колесного датчика ко второму.
На втором участке скорость меняет направление движения (Δiчет.<Δiнеч.).
На третьем участке скорость снова меняет направление движения (Δiнеч.<Δiчет.).
На четвертом участке вновь изменяется направление движения (Δiчет.<Δiнеч.).
В последовательности отсчетов идентификационных данных присутствует совпадающее значение, указывающее на наличие возвратного движения.
4. Восстановление сбойных участков.
Для второго массива:
Восстановление сбойных участков в условиях равенства скоростей прохождения тележкой колесных датчиков означает исключение из массива данных повторных значений отсчетов первого колесного датчика
5. Производится нумерация колес подвижного состава с учетом направления движения.
6. Интервалы с идентичными номерами исключаются из рассмотрения. Для третьего массива устанавливается факт возврата состава из зоны напольного считывающего устройства.
7. Определяются при помощи базового расстояния и средней скорости колесных пар Фиг.6 расстояния между соседними колесными парами Sэлi (последний столбец массива).
Sэлi=Sб(B2i+2+B2i+1-B2i-B2i-1)/(B2i+2-B21+l+B2i-B2i-1),
где i=1, 2, 3, 4...
8. Из базы подвижных единиц определяются по совпадающим элементам (тележкам, межтележечным расстояниям).
Для первого массива
Две секции пассажирского электровоза типа ЧС7
Для второго массива
3-и секции грузового электровоза типа ВЛ80Р
9. Определяются положения кодовых датчиков на подвижных единицах и исключаются ложные
Для первого массива
Датчики расположены за вторым колесом первой тележки
Для второго
Датчики на первой и третьей секции за вторым колесом первой тележки
На второй секции датчик размещается в межсекционное пространство (в зоне 5,95 м), поэтому исключается как ложный, считанный с встречного состава.
10. Строится конечное сообщение с учетом кодовых датчиков и времени прохода состава.
Для первого массива
Направление от 1 к 2
ЧС7(А) 12022802
ЧС7(Б) 12022794
TIME=07.06.04 15:45:28
Для второго массива
Направление от 2 к 1
ВЛ80Р(Б) 12636148
ВЛ80Р
ВЛ80Р(А) 12636130
TIME=02.04.04 11:23:11
Для третьего массива возможно сообщение о факте появления без сквозного прохода пассажирского локомотива ЧС7 с идентификационным номером 12025623
TIME=07.06.04 14:37:12
11. Конечное сообщение запоминается в памяти системы до прохода следующего состава (для контроля ситуации с остановкой состава перед контрольным пунктом).
При отсутствии тяговой единицы в последующем составе и наличии в составе базовых единиц формируется объединенный состав с составом из памяти системы.
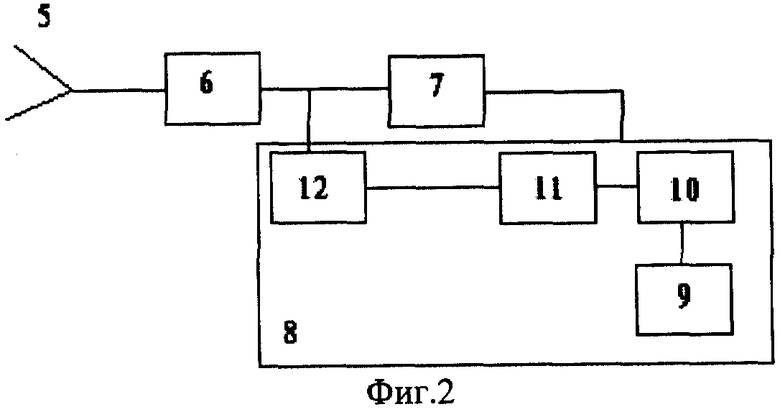
Осуществление способа поясняется с помощью системы идентификации, представленной на Фиг.1, 2, 3, 4, 5. Система идентификации Фиг.1 состоит из пассивных датчиков 1 идентификации подвижных единиц 2, напольных считывающих устройств (НСУ) 3...3n и устройства 4 обработки первичной информации НСУ. Кодовый датчик Фиг.2 содержит антенну 5 СВЧ, выпрямитель 6 сигнала СВЧ и ограничитель 7 питания формирователя 8 кода (например, микросхема 563РТ1), содержащего генератор 9 тактовых импульсов, блок 10 памяти идентификационного кода, формирователь 11 импульсной последовательности, модулятор 12 волновой нагрузки антенны.
Напольное считывающее устройство Фиг.3 содержит первый колесный датчик 13 и второй колесный датчик 131, устанавливаемые на ближайшем к напольному считывающему устройству рельсе на расстоянии между собой меньшем минимального межосевого размера тележки, при этом выход первого колесного датчика 13 подключается к входу первого формирователя 14 импульсов, выход которого подключается к первому каналу 1к облучающего считывающего устройства (считывателя) 15, а выход второго колесного датчика 131 подключается к входу второго формирователя 141 импульсов, выход которого подключается ко второму каналу 2к считывателя 15, выход которого подключен через модем 16 к локальной линии связи.
Колесные датчики могут быть, например, индуктивные, формирующие бестоковый (перепад тока) режим фиксации проезда колеса над датчиком.
Формирователь импульсов выполнен, например, в виде резистора-нагрузки колесного датчика, подключенного к аналоговому компаратору, формирующему импульс логического уровня.
Считыватель Фиг.4 функционально содержит приемно-передающее устройство 17, сигнальный процессор 23 и блок центрального процессора 26, управляющего работой считывателя. Приемно-передающее устройство содержит задающий генератор 19 несущей частоты, один выход которого через циркулятор 20 соединен с приемопередающей антенной 18, а второй выход - с первым входом смесителя 21 с квадратурным расщеплением сигнала, на второй вход которого поступает через циркулятор сигнал с приемопередающей антенны считывателя. Два продетектированных сигнала с выходов смесителя поступают на два входа полоснопропускающего формирователя 22 уровней, где усиливаются и фильтруются по высокой частоте и поступают в сигнальный процессор 23, в счетчик 24 длительности фазовых состояний, выход которого соединен с входом компаратора 25 длительностей.
Блок центрального процессора 26 содержит микропроцессор 27 (например, ИМС 188ЕВ-40, объединяющий в своем составе процессорный элемент с внутренней 16-разрядной шиной данных и внешней 8-разрядной шиной данных; 3 независимых 16-разрядных таймера-счетчика; 2 последовательных асинхронных приемопередатчика; контроллер прерываний на 5 внешних источников прерываний и 2 внутренних; формирователь сигналов выборки для различных зон размещения в пространстве памяти и пространстве устройств ввода-вывода), постоянное запоминающее устройство с управляющей программой для микропроцессора 28 (например, динамическое FLASH ПЗУ Am29C010JI фирмы AM, операционное запоминающее устройство 29 для хранения поступающих данных, устройство формирования прерываний микропроцессора от сигналов формирователя импульсов колесных датчиков, сигнального процессора и включения генератора 30 СВЧ, блок 31 приемопередатчиков интерфейса (например, АDМ209АR-приемопередатчик интерфейса RS-232) для обмена микропроцессора данными через модем и локальную линию связи с устройством обработки первичной информации.
Модем связи с локальной линией связи может быть любой стандартной модификации.
Устройство обработки первичной информации состоит из вычислительного блока (например, стандартного PC с программным обеспечением, реализующим вычислительный процесс способа), платы расширения последовательных портов, модемов стандартной конфигурации.
Система работает следующим образом.
При наезде состава первым колесом на ближайший по движению колесный датчик, например, первый 13 формирователь 14 импульсов, подключенный к этому датчику формирует импульс, который поступает в канал устройства прерывания и включения генератора 30 СВЧ считывателя. В результате обнуляется таймер временной сетки процессора, в ОЗУ в область памяти колесных датчиков записывается номер датчика и время отсчета таймера (ноль) и включается генератор 19 СВЧ. Сигнал генератора через циркулятор 20 поступает на вход антенны 18, которая начинает зондировать пространство в зоне диаграммы направленности антенны, при этом часть энергии с генератора поступает на первый вход смесителя 21. Кодовый датчик 1 установлен за вторым колесом первой тележки состава и поэтому по мере движения попадает зону облучения. Сигнал СВЧ, принятый антенной 5 датчика, выпрямляется выпрямителем 6 и через ограничитель с емкостной фильтрацией запитывает формирователь 8 кода. Формирователь кода вырабатывает импульсную кодовую последовательность, в соответствии с которой модулятор 12 изменяет волновое сопротивление нагрузки антенны, модулируя отражательные свойства антенны. В результате отраженный амплитудно-модулированный кодовой последовательностью сигнал СВЧ поступает в антенну считывателя и через циркулятор на второй вход смесителя. Смеситель 21 реализует гетеродинный принцип выделения низкочастотного сигнала по двум составляющим, сдвинутым на 90°. Два продетектированных сигнала с выходов смесителя поступают на два входа полоснопропускающего формирователя 22 уровней, где усиливаются и фильтруются по высокой частоте и поступают в сигнальный процессор 23 в счетчик 24 длительности фазовых состояний, выход которого соединен с входом компаратора 25 длительностей.
На выходе сигнального процессора формируется двоичная кодовая последовательность, которая поступает в процессор 27, и одновременно через устройство прерывания формируется цикл прерывания в результате, которого эта последовательность со считанным значением таймера временной сетки процессора поступает в оперативное запоминающее устройство 29 в область, отведенную кодовым датчикам. По мере поступления информация от колесных датчиков и кодовых датчиков поступает в соответствующие области ОЗУ. Устройство обработки первичной информации опрашивает через последовательные порты по локальным линиям связи, подключенные к нему напольные считывающие устройства, и при наличии информации считывает каждую в виде последовательности временных отметок индексированных колесных и кодовых датчиков.
Далее по алгоритму предлагаемого способа идентифицируются составы, прошедшие мимо НСУ, подключенных к устройству обработки первичной информации Фиг.5.
Предлагаемый способ испытан в системе идентификации железнодорожного транспорта РФ и показал высокую надежность определения подвижных единиц и состава в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОДОВЫЙ БОРТОВОЙ ДАТЧИК ИДЕНТИФИКАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СЪЕМА ИНФОРМАЦИИ С ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2346841C1 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА ПОДВИЖНОГО СОСТАВА | 2020 |
|
RU2744048C1 |
| СИСТЕМА ДИСТАНЦИОННОГО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ И ИХ УЗЛОВ | 2004 |
|
RU2291468C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ АВАРИИ СОСТАВА (СПАС) | 2005 |
|
RU2307040C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ НА ЗАМКНУТОЙ ТЕРРИТОРИИ | 2014 |
|
RU2570976C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЧИТЫВАНИЯ ИДЕНТИФИКАЦИОННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2320510C2 |
| СПОСОБ СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2191127C1 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2012 |
|
RU2506186C1 |
| Устройство считывания информации с подвижных объектов железнодорожных составов | 2020 |
|
RU2735146C1 |




Изобретение относится к системам идентификации подвижных объектов железнодорожного транспорта. Способ идентификации заключается в записи сигналов от двух колесных датчиков в моменты пересечения их колесными парами подвижного состава. Колесные датчики расположены друг от друга на заданном фиксированном расстоянии, величина которого меньше минимально возможного межосевого расстояния. В момент пересечения первого колесного датчика производят облучение СВЧ-сигналом пассивных приемоответчиков, установленных на подвижных единицах состава, а также формируют импульс, который запускает таймер временных отметок, привязывая временную систему отсчета к движущемуся составу. Предварительно в память измерительного средства записывают данные о структуре межосевых расстояний колесных пар, соответствующие определенным типам подвижных единиц, и данные о подвижных единицах, соответствующие кодам, записанным в память пассивных приемоответчиков. При этом предлагается алгоритм определения временного местоположения пассивного приемоответчика, а также определения скорости и направления движения состава. В случае пропуска записи сигналов от колесных датчиков и/или наличия ложной информации восстанавливают периодичность записанных сигналов. По полученным данным от колесных датчиков и пассивных приемоответчиков идентифицируют подвижной состав. Изобретение позволяет повысить надежность и достоверность идентификации подвижных объектов. 6 ил.
Способ идентификации подвижных составов, заключающийся в записи сигналов, сформированных в моменты пересечения колесными парами подвижного состава двух колесных датчиков, установленных на контрольном пункте и расположенных друг от друга по ходу движения подвижного состава на заданном фиксированном расстоянии, величина которого меньше минимально возможного межосевого расстояния, определении интервалов времени между сигналами от двух колесных датчиков, сформированных и записанных в момент пересечения этих датчиков колесной парой и интервалов времени, по величинам которых с учетом заданного фиксированного расстояния между колесными датчиками определяют межосное расстояние с последующим сравнением полученных данных с предварительно записанными данными в память измерительного средства, отличающийся тем, что при прохождении первым колесом состава первого по движению колесного датчика формируется импульс, который запускает таймер временных отметок, привязывая временную систему отсчета к движущемуся составу, предварительно в память измерительного средства записывают данные о структуре межосевых расстояний колесных пар, соответствующие определенным типам подвижных единиц, и данные о подвижных единицах, соответствующие кодам, записанным в память пассивных приемоответчиков, установленных на подвижных единицах состава, облучение СВЧ-сигналом пассивных приемоответчиков производят с момента пересечения первого колесного датчика первой колесной парой подвижного состава, а считывание и запись кодового сигнала осуществляют при вхождении приемоответчика в зону облучения СВЧ-сигналом, при этом осуществляют запись момента входа приемоответчика в зону облучения СВЧ-сигналом и момента его выхода из этой зоны облучения, и по полученным данным определяют временное местоположение приемоответчика, по интервалам времени между записанными сигналами, сформированными в моменты пересечения колесных датчиков колесными парами, определяют скорость и направление движения подвижного состава и в случае пропуска в записи сигналов и/или наличия ложных сигналов, свидетельствующих об изменении скорости или направления движения, восстанавливают периодичность записанных сигналов, определяют межосные расстояния и сравнивают с предварительно записанными в память измерительного средства данными и по результатам сравнения определяют структуру и тип подвижных единиц и положение приемоответчиков, по которому устанавливают принадлежность приемоответчиков к подвижным единицам идентифицируемого состава, и по результатам сравнения кодовых сигналов подтверждают тип подвижной единицы и ее принадлежность, определяют последовательность вхождения подвижных единиц в состав и фиксируют время прохода идентифицированного состава мимо контрольного пункта.
| RU 2000978 C1, 15.10.1993 | |||
| СИСТЕМА СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНОГО СОСТАВА НА ДВУХПУТНОМ УЧАСТКЕ ЖЕЛЕЗНОЙ ДОРОГИ | 2002 |
|
RU2203822C1 |
| Способ оценки социальной активности человека | 2015 |
|
RU2640570C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СПЕКТРОМ | 2014 |
|
RU2593761C2 |
| US 4265419 A1, 05.05.1981. | |||

