Изобретение относится к системам диспетчерского управления рельсовыми транспортными средствами, а именно к устройствам регистрации и определения местоположения подвижного состава [B61L25/02].
Из уровня техники известен КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УЧЕТА ВАГОНООБОРОТА [RU110354 (U1), опубл.: 20.11.2011], характеризующийся тем, что он содержит систему считывания номеров вагонов, систему обработки и передачи считываемых данных, систему распознавания номеров вагонов, систему централизованного сбора, передачи и долговременного хранения данных, автоматизированное рабочее место (АРМ) администратора, при этом система считывания номеров вагонов содержит, по крайней мере, одну точку считывания, выполненную в виде двух опор, установленных по обе стороны от контролируемого железнодорожного пути, на которые монтируются блок оптической регистрации, снабженный телекамерами, и осветительный блок, образованный светодиодными светильниками, а также содержащий датчиковую подсистему позиционирования вагона, состоящую из датчиков, размещенных на опорах, и магнитных датчиков, размещенных на одном рельсе по разные стороны от оси, соединяющей противоположные телекамеры, система обработки и передачи считываемых данных связана с системой считывания номеров вагонов, снабжена локальным сервером и содержит размещенные в контейнере контроллер, модуль локальной передачи данных, модуль удаленной передачи данных, система распознавания номеров вагонов связана с системой обработки и передачи считываемых данных и на каждой из точек считывания содержит видеосервер, программные модули счета вагонов, видеозахвата, распознавания номеров вагонов, оперативный архив видеоданных и архив составов, система централизованного сбора, передачи и долговременного хранения данных представляет собой центральный пост, содержащий долговременное хранилище данных, состоящее из накопительных модулей, программный модуль ведения баз данных и центральный сервер управления, связанный с системами считывания, распознавания через сеть Ethernet и снабженный программным модулем интеграции с АСУ предприятия, автоматизированное рабочее место (АРМ) администратора содержит программный модуль мониторинга состояния комплекса (КАУ-В) и программный модуль управления системой считывания.
Недостатком аналога является низкая надежность комплекса, высокая трудоемкость его монтажа и обслуживания и высокие трудозатраты в изготовлении, обусловленные его сложной конструкцией и наличием большого количества внешних датчиков распознавания вагонов.
Также известна СИСТЕМА КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ [RU2567306 (C1), опубл.: 10.11.2015] , содержащая установленные на рельсовых цепях стрелок, отделяющих пути горизонтальных парков станции от маневровых районов и от входной и выходной горловин станции, реверсивные датчики счета осей, выходами подключенные через блок обработки сигналов к первому входу блока расчета скорости подвижного объекта, выход которого соединен с входом блока определения колесной формулы подвижного объекта, вторым входом подключенного ко второму выходу блока обработки сигналов, а выходом - к первому входу центрального процессора, второй вход которого соединен через последовательно соединенные блок формирования динамической модели станции и блок обработки данных к выходу аппаратно-программного устройства системы электрической централизации, блок памяти, входами/выходами подключенный к выходу/входу центрального процессора, второй вход/выход которого соединен через сервер связи с аппаратно-программным устройством автоматизированной системы управления станцией, а выходы - с входами блоков регистрации дислокации подвижного объекта и регистрации состояния устройств электрической централизации, входы/выходы которых подключены к аппаратно-программным устройствам автоматизированных рабочих мест соответственно дежурного по станции и дежурного электромеханика.
Недостатком аналога является отсутствие возможности определения местонахождения, отстыкованных от подвижного состава вагонов и их отслеживания на предприятиях, располагающих разветвленной железнодорожной сетью.
Наиболее близким по технической сущности является СПОСОБ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА [RU2004128902 (A), опубл.: 10.03.2006], заключающийся в записи сигналов, сформированных в моменты пересечения колесными парами подвижного состава двух колесных датчиков, установленных на контрольном пункте и расположенных друг от друга по ходу движения подвижного состава на заданном фиксированном расстоянии, величина которого меньше минимально возможного межосевого расстояния, определении интервалов времени между сигналами от двух колесных датчиков, сформированных и записанных в момент пересечения этих датчиков колесной парой и интервалов времени между моментами пересечения смежных колесных пар подвижного состава, по величинам которых с учетом заданного фиксированного расстояния между колесными датчиками определяют межосное расстояние с последующим сравнением полученных данных с предварительно записанными данными в память измерительного средства, отличающийся тем, что интервалы времени между сигналами от двух колесных датчиков, сформированных и записанных в момент пересечения этих датчиков колесной парой и интервалы времени между моментами пересечения смежных колесных пар подвижного состава определяются относительно сигнала первого колесного датчика, сформированного и записанного в момент пересечения первой колесной пары состава, предварительно в память измерительного средства записывают данные о структуре межосевых расстояний колесных пар, соответствующие определенным типам подвижных единиц и данные о подвижных единицах, соответствующие кодам, записанным в память пассивных приемоответчиков, установленных на подвижных единицах состава, облучение СВЧ-сигналом пассивных приемоответчиков производят с момента пересечения первого колесного датчика первой колесной парой подвижного состава, а считывание и запись кодового сигнала осуществляют при вхождении приемоответчика в зону облучения СВЧ-сигналом, при этом осуществляют запись момента входа приемоответчика в зону облучения СВЧ-сигналом и момента его выхода из этой зоны облучения, и по полученным данным определяют временное местоположение приемоответчика, по интервалам времени между записанными сигналами, сформированными в моменты пересечения колесных датчиков колесными парами, определяют скорость и направление движения подвижного состава и в случае пропуска в записи сигналов и/или наличия ложных сигналов, свидетельствующих об изменении скорости или направления движения, восстанавливают периодичность записанных сигналов и определяют межосные расстояния по заданному фиксированному расстоянию между колесными датчиками и скорости движения колесных пар и сравнивают с предварительно записанными в память измерительного средства данными и по результатам сравнения определяют структуру и тип подвижных единиц и положение приемоответчиков, по которому устанавливают принадлежность приемоответчиков к подвижным единицам идентифицируемого состава и по результатам сравнения кодовых сигналов подтверждают тип подвижной единицы и ее принадлежность, определяют последовательность вхождения подвижных единиц в состав и фиксируют время прохода идентифицированного состава мимо контрольного пункта.
Основной технической проблемой прототипа является высокая погрешность идентификации вагонов подвижного состава с одинаковыми межосевыми расстояниями, а также высокие трудоемкость и трудозатраты изготовления, монтажа и обслуживания системы, реализующей описанный способ, а также низкая надежность, обусловленные наличием в конструкции приемоответчиков и источников СВЧ-сигналов.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение точности и оперативности получения данных о состоянии и местонахождении каждого из вагонов подвижного состава и скорости их оборачиваемости.
Указанный технический результат достигается за счет того, что способ мониторинга подвижного состава, характеризующийся записью сигналов колесными датчиками, определению интервалов времени между сигналами, определению по записанным сигналам типов подвижных единиц и данных о подвижных единицах, определению скорости и направления движения подвижного состава и фиксацией время прохода идентифицированного состава вдоль колесных датчиков, отличающийся тем, что предварительно в блок сбора и обработки данных записывают исходные данные, соответствующие элементам подвижного состава в последовательности очередности расположения элементов в подвижном составе с присвоением каждому из элементов индивидуального идентификатора, распределяют элементы подвижного состава по участкам, подают подвижный состав на станцию, при прохождении элемента вдоль колесных датчиков, смонтированных, как минимум, в начале и конце каждого из участков считают количество сформированных упомянутыми датчиками электрических сигналов, объединяют указанные сигналы в группы, соответствующие количеству осей в элементе подвижного состава и сопоставляют их с исходными данными, рассчитывают параметры сгруппированных сигналов с возможностью определения скорости прохождения и направления движения элементов вдоль датчиков и осуществляют привязку ко времени каждой из группы сигналов, сопоставленные с исходными данными и привязанные ко времени группы сигналов сопоставляют с индивидуальными идентификаторами каждого из элементов и записывают значение переменной Xi, по записанным переменным Xi в момент времени ∆Т формируют данные о местонахождении и использовании каждого из элементов подвижного состава.
В частности, индивидуальный идентификатор включает информацию о количестве осей элемента.
В частности, индивидуальный идентификатор включает информацию из натурного листа подвижного состава.
В частности, индивидуальный идентификатор включает информацию из паспорта элемента.
В частности, индивидуальный идентификатор включает допустимое время простоя элемента.
В частности, элементы распределяют по участкам в зависимости от их дальнейшего назначения.
В частности, скорость и направление движение определяют по задержке поступления электрических сигналов от датчиков.
Указанный технический результат достигается за счет того, что система мониторинга подвижного состава, содержащая колесные датчики, подключенные к измерительному устройству, отличающаяся тем, что колесные датчики смонтированы попарно на рельсах, как минимум, в начале и конце каждого из контролируемых блок-участков рельсовых путей и выполнены с возможностью счета количества осей элементов подвижного состава путем формирования электрических сигнала при прохождении вдоль упомянутых датчиков осей подвижного состава, каждая из пар датчиков соединена с контроллерами и через шлюзы, выполненные с возможностью обмена данными к блоку сбора и обработки данных, к которому также подключены блок хранения данных и интерфейс пользователя, к контроллерам подключены модули определения направления и оперативные запоминающие устройства.
В частности, датчики смонтированы перед и после стрелочного перевода.
В частности, шлюзы выполнены с возможностью обмена данными по проводным каналам связи.
В частности, шлюзы выполнены с возможностью обмена данными по радиоканалу.
В частности, датчики выполнены индуктивными.
В частности, блок хранения данных выполнен в виде сервера.
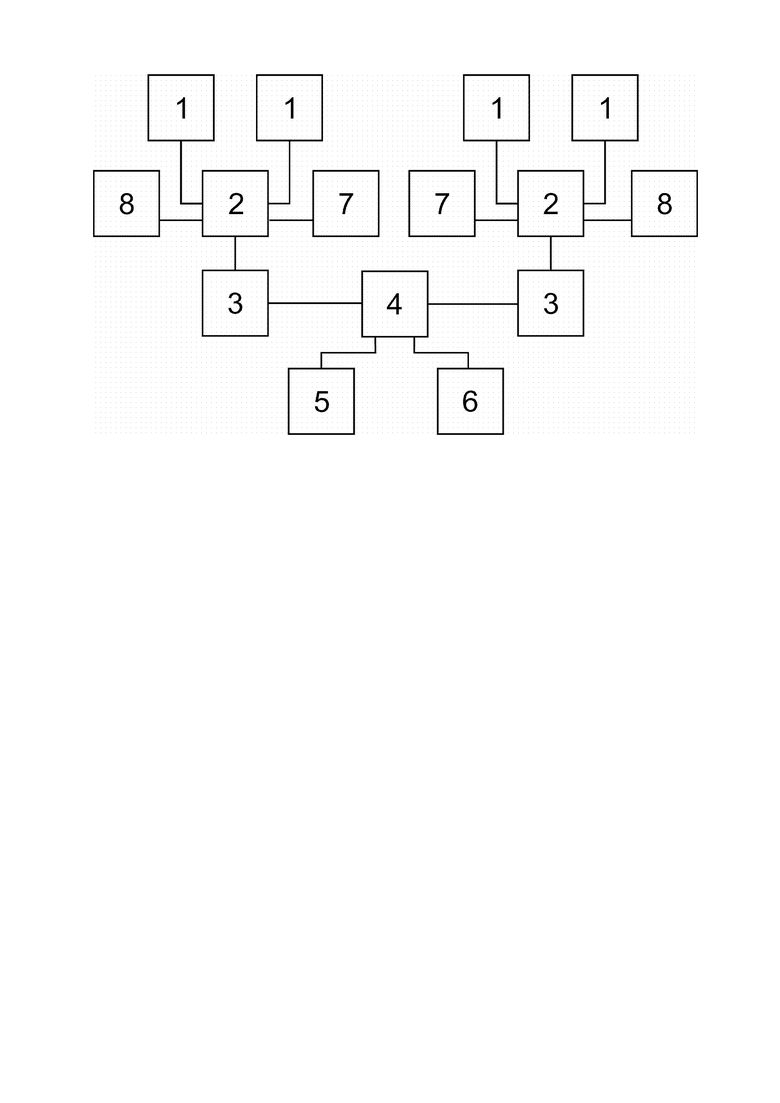
Краткое описание чертежей.
На фигуре показана блок-схема системы мониторинга подвижного состава, на которой обозначено: 1 – датчики, 2 – контроллеры, 3 – шлюзы, 4 – блок сбора и обработки данных, 5 – блок хранения данных, 6 – интерфейс пользователя, 7 – модуль определения направления движения, 8 – оперативное запоминающее устройство.
Осуществление изобретения.
Блок-участок — часть межстанционного перегона при автоблокировке или при автоматической локомотивной сигнализации, применяемой как самостоятельное средство сигнализации и связи, ограниченная проходными светофорами (границами блок-участков) или проходным светофором (границей блок-участка) и входным светофором железнодорожной станции, а также выходным светофором и первым попутным проходным светофором (границей блок-участка).
Стрелочный перевод — это устройство соединения путей, которое предназначено для перевода подвижного состава с одного пути на другой. При соединении нескольких параллельных путей стрелочные переводы располагают друг за другом на одном общем пути, который получил название стрелочной улицы.
Подвижной состав — единая транспортная единица. Подвижной состав подразделяется на подвиды: пассажирский и для транспортировки грузов.
Железнодорожный подвижной состав бывает: тяговый, моторвагонный подвижной состав, несамоходный подвижной состав и самоходный подвижной состав.
Вагоны различают по видам: для перевозки пассажиров и грузов.
Вагоны различают по количеству осей (осных пар): выпускают 2, 4, 6 и 8-осные вагоны.
Основными параметрами вагона являются грузоподъемность, собственная масса (тара), осевая нагрузка и погонная нагрузка (нагрузка на один метр пути).
Выделят парк пассажирских и грузовых вагонов:
пассажирские:
цельнометаллический (СВ, купе, плацкарт, общий).
грузовые:
цельнометаллический багажный вагон;
почтово-багажный вагон;
крытый вагон (предназначен для перевозки груза небольших размеров, но в большом количестве);
платформа;
цистерна (предназначена для перевозки жидких грузов);
транспортер (предназначен для перевозки непереработанного дерева);
полувагон (предназначен для перевозки тяжелых пластин, чаще - металла);
рефрижераторный вагон (вагон с охладительным оборудованием).
Специализированные вагоны:
вагон для перевозки контейнеров;
вагон для перевозки автомобилей;
вагон для перевозки леса;
вагон для перевозки скота;
вагон для перевозки бумаги и бумажных изделий.
Натурный лист поезда – основной технологический документ, используемый для организации процесса обработки вагонопотоков на станциях железных дорог. Является первоисточником для учёта наличия вагонов на железнодорожных станциях и создания вагонной модели и служит для передачи информации о прибытии, отправлении и подходе поездов и для розыска вагонов. Является унифицированным документом и составляется на станции формирования состава. Содержит общие сведения о поезде (номер, индекс, масса и длина поезда, число осей, наличие в составе вагонов, требующих соблюдения особых условий: негабаритные грузы, перевозка живности и т.п.), сведения о каждом вагоне и перевозимом в нём грузе, размещённые по строкам строго в очерёдности расположения вагонов в составе поезда (порядковый номер в составе и индивидуальный номер вагона, данные о типе подшипников, масса перевозимого груза, код станции назначения вагона по единой сетевой разметке, особые кодированные отметки, характеризующие перевозки, коды рода груза и грузополучателя, сведения о наличии контейнеров или пломб, в необходимых случаях — алфавитно-цифровое примечание), итоговые сведения о составе поезда по роду вагонов, а гружёных вагонов — по дорогам назначения.
Система мониторинга подвижного состава состоит из датчиков 1, выполненных с возможностью счета осей подвижного состава, смонтированных попарно на рельсах, как минимум, в начале и конце каждого из контролируемых блок-участков рельсовых путей или перед и после стрелочного перевода. Каждая пара датчиков 1 соединена с контроллером 2, выполненный, например в виде LoRaWan-контроллера. Контроллеры 2 через шлюзы 3, выполненные с возможностью обмена данными, подключены к блоку сбора и обработки данных 4, к которому также подключены блок хранения данных 5 и интерфейс пользователя 6, при этом блок хранения данных выполнен в виде сервера, а интерфейс пользователя выполнен в виде ПЭВМ или мобильного устройства (ноутбук, планшет, смартфон).
Шлюзы 3 выполнены с возможностью обмена данными по проводным каналам связи или радиоканалам, при этом для обеспечения возможности обмена данными по радиоканалам шлюзы могут быть выполнены в виде, например, LoRaWan-станции. К контроллерам 2 подключены модули определения направления 7 и оперативные запоминающие устройства 8.
Систему мониторинга подвижного состава используют следующим образом.
Перед началом использования датчики 1 монтируют попарно на стрелочных переводах станции и подключают их к контроллерам 2.
Перед подачей подвижного состава, состоящего из вагонов разного рода и видов, движимых локомотивом,, например, на промышленное предприятие, располагающее сетью рельсовых путей, каждому вагону, строго в очерёдности расположения вагонов в составе поезда начиная с первого, присваивают индивидуальный идентификационный номер, в виде, например, цифрового, буквенного или цифро-буквенного обозначения, например, А, Б, В или А-1, А-2, Б-1, Б-2 или 1А, 3Б и т.д. В блок сбора и обработки данных 4 для каждого из индивидуальных идентификационных номером записывают исходные данные, такие как, номер, индекс, масса и длина поезда и т.д. Для каждого из поименованного в системе вагонов в исходных данных указывают число осей, а также допустимое время простоя Тпрi и указывают, например, негабаритные грузы, характер груза, индивидуальный номер вагона, данные о типе подшипников, масса перевозимого груза, код станции назначения вагона по единой сетевой разметке, особые кодированные отметки, характеризующие перевозки, коды рода груза и грузополучателя, сведения о наличии контейнеров или пломб, при необходимости алфавитно-цифровое примечание, итоговые сведения о составе поезда по роду вагонов, а гружёных вагонов — по дорогам назначения и т.д.
Кроме того, в исходных данных, для каждого из пронумерованных вагонов указываются, например, место и время постройки и приписки, тип вагона или его модель, род вагона, тара, длина рамы, изменения вагона, указываются дата, место проведения и вид ремонта вагона (деповской, капитальный), а также наименование или код собственника и арендатора.
Далее вагоны распределяют по блок-участкам в зависимости от их дальнейшего назначения.
Например, подвижный состав на входе на промышленное предприятие содержит 6 вагонов, с присвоенными обозначениями, соответственно, А, Б, В, Г, Д, Е, начиная с головы состава. Первые 3 вагона выполнены в виде 4-х осных крытых вагонов-хопперов для зерна. Последние два вагона выполнены в виде 6-и осных крытых вагонов-хопперов для угля.
Определяют исходя из потребности предприятия, например, подачу вагона А на блок-участок II, вагона Б на блок участок VI, вагонов В, Г на блок-участок IV и вагонов Д, Е на блок-участок V. Вносят сведения о распределении каждого из вагонов в блок сбора и обработки данных 4.
После распределения разрешают подачу подвижного состава на предприятие.
При прохождения вагона А блок-участка II, вагона Б блок-участка VI, вагонов В, Г, Д, Е сначала блок-участка III, а затем вагонов В, Г блок-участка IV и вагонов Д, Е блок-участка V датчики 1, смонтированные, как минимум, в начале и конце упомянутых блок-участков I-IV при контакте с осями (осными парами) передают информацию на контроллеры 2 в виде электрических сигналов по количеству пройденных через датчики 1 осей (осных пар). Амплитуды и периоды сигналов зависят от скорости прохождения осей (осных пар) через датчики 1.
Контроллеры 2 в исходном положении отключены и включаются по прохождении первой оси (осной пары) первого вагона и отключаются по прохождении последней оси (осной пары) последнего вагона с задержкой в несколько секунд.
В модуле определения направления движения 7 по задержке поступления электрических сигналов от датчиков 1 определяют направление движения подвижного состава или вагонов. Контроллер 2 регистрирует количество сигналов от датчиков 1, определяющей количество прошедших по участку пути колесных осей подвижного состава и вместе с информацией о направлении движения, полученной от модулей определения направления движения 7, записывает ее в оперативное запоминающее устройство 8.
Контроллеры 2 данные с оперативных запоминающих устройств 8 о количестве прошедших осей (осных пар) и направлении их движения отправляют через шлюзы 3 в блок сбора и обработки данных 4.
Привязку ко времени каждого из сигналов от датчиков 1 ti осуществляют в контроллерах 2 или блоке сбора и обработки данных 4 от приемника сигналов точного времени (на фигурах не показан).
В блоке сбора и обработки данных 4 полученные данные сортируют, определяют скорость движения подвижного состава (вагонов) по контролируемому участку, в случае превышения или снижения скорости подвижного состава от допустимой скорости дают команду машинисту подвижного состава для изменения скорости движения, анализируют исходные и полученные данные, сопоставляют их с присвоенными обозначениями (нумерацией) вагонов по количеству осей и зарегистрированных датчиками 1 сигналов и определяют, согласно приведенного примера, что через датчики 1 блок-участка I прошло четыре 4-х осных крытых вагона-хопперов для зерна и два 6-и осных крытых вагона-хопперов для угля. После проведенного анализа формируют текущее по дате, времени и месту значение переменной Xi значение которой из блока сбора и обработки данных 4 передают в блок хранения данных 5.
Аналогичным описанному выше алгоритму осуществляют регистрацию всех маневровых и не маневровых операций, при которых в блоке сбора и обработки данных 4 по переменным Xi формируют данные о местонахождении и использовании каждого вагона на предприятии, его текущем состоянии, времени подачи и простоя на предприятии.
Пользователь через интерфейс пользователя 6 запрашивает из блока хранения данных 5 значения той или иной переменной Xi за промежуток времени и даты для определения фактического прохождения через контролируемый участок рельсового пути подвижного состава, его скорости прохождения и количестве вагонов.
При превышении допустимого времени простоя Тпрi какого-либо из вагонов подвижного состава блок сбора и обработки данных 4 подает сигнал оповещения на интерфейс пользователя 6 при получении которого пользователь осуществляет операцию с вагоном для его оборота.
Технический результат изобретения - повышение точности и оперативности получения данных о состоянии и местонахождении каждого из вагонов подвижного состава и скорости их оборачиваемости, достигается за счет того, что каждому из вагонов в порядке их очередности в подвижном составе в блоке сбора и обработки данных 4 присваивают индивидуальный идентификационный номер и привязывают к указанному номеру информацию о количестве осей вагона, данных о вагоне из натурного листа подвижного состава и паспорта вагона, распределяют вагоны по блок-участкам предприятия-пользователя, при прохождении вагонов вдоль колесных датчиков 1, смонтированных, как минимум, в начале и конце каждого из блок-участков формируют импульсный электрический сигнал который с колесных датчиков 1 передают в контроллер 2 и привязывают в контроллере 2 каждый из сигналов ко времени, в модуле определения направления движения 7 по задержке поступления электрических сигналов от датчиков 1 определяют направление движения вагонов, данные о количестве зарегистрированных сигналов от датчиков 1, времени возникновении каждого из сигналов и скорости и направлении движения вагонов записывают в оперативное запоминающее устройство 8 и от через шлюзы 3 передают в блок сбора и обработки данных 4, где полученные данные о сигналах разбивают по количеству осей в вагоне по группам, сопоставляют их с индивидуальными идентификационными номерами, записывают значение переменной Xi в блок хранения данных 5, по записанным переменным Xi в момент времени ∆Т данные о местонахождении и использовании каждого из вагонов считывают из блока хранения данных 5 и отображают на интерфейсе пользователя 6.
В 2019 году описанные выше способ и устройство мониторинга подвижного состава были внедрены на нескольких предприятиях российского металлургического комплекса, особенностью логистики которых является развитая внутренняя железнодорожная сеть. Общий объем проведенных строительно-монтажных работ при внедрении устройства и его опытная эксплуатация в совокупности с заявленным способом позволили снизить трудоемкость и трудозатраты в среднем до 30% по сравнению с аналогичными техническими решениями, а оперативность получения данных и малая погрешность идентификации вагонов, а также наличие полных показателей работы, в т.ч. недокументированных особенностей обеспечили повышение почти в 2 раза в отличии от натурного списывания скорости оборачиваемости вагонов за счет снижения их простоев, что в свою очередь позволило снизить объем платежей за время пользования вагонами и соответственно повысить экономический эффект от внедрения описанного технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2280580C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| АВТОМАТИЧЕСКИЙ ИДЕНТИФИКАТОР НОМЕРА ВАГОНА | 2012 |
|
RU2508216C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СИСТЕМА КОНТРОЛЯ ЗА ПЕРЕМЕЩЕНИЕМ И СОСТОЯНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2305327C2 |
| Система контроля местоположения поездов | 2019 |
|
RU2727438C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ | 2010 |
|
RU2450948C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЧИТЫВАНИЯ ИДЕНТИФИКАЦИОННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2320510C2 |
Группа изобретений относится к системе и способу мониторинга подвижного состава. Система содержит: колесные датчики, контроллеры, шлюзы, блок хранения данных и интерфейс пользователя. Колесные датчики подключены к измерительному устройству и попарно смонтированы на рельсах, как минимум, в начале и конце каждого блок-участка рельсовых путей. Датчики выполнены с возможностью счета количества осей элементов подвижного состава, путем формирования электрических сигналов при прохождении вдоль датчиков осей подвижного состава. Каждая пара датчиков соединена с контроллерами и через шлюзы с блоком сбора и обработки данных. Шлюзы выполнены с возможностью обмена данными с блоком сбора и обработки данных, к которому также подключены блок хранения данных и интерфейс пользователя. К контроллерам также подключены модули определения направления и оперативные запоминающие устройства. Достигается повышение точности данных о состоянии вагонов подвижного состава. 2 н. и 11 з.п. ф-лы, 1 ил.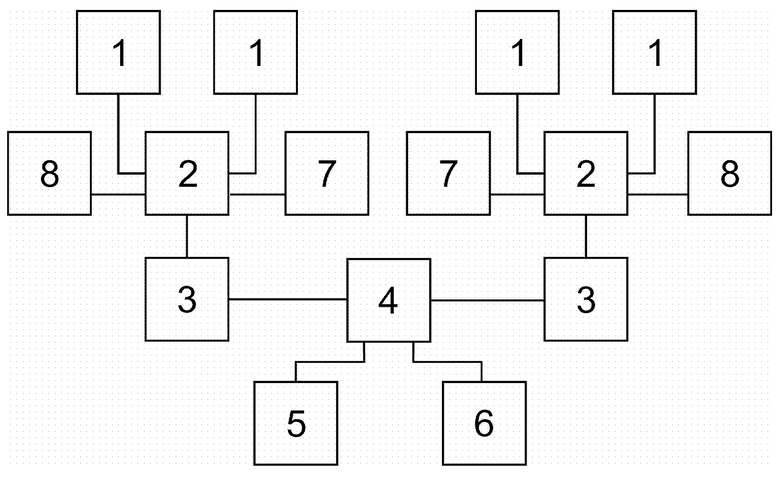
1. Способ мониторинга подвижного состава, характеризующийся записью сигналов колесными датчиками, определением интервалов времени между сигналами, определением по записанным сигналам типов подвижных единиц и данных о подвижных единицах, определением скорости и направления движения подвижного состава и фиксацией времени прохода идентифицированного состава вдоль колесных датчиков, отличающийся тем, что предварительно в блок сбора и обработки данных записывают исходные данные, соответствующие элементам подвижного состава в последовательности очередности расположения элементов в подвижном составе с присвоением каждому из элементов индивидуального идентификатора, распределяют элементы подвижного состава по участкам, подают подвижный состав на станцию, при прохождении элемента вдоль колесных датчиков, смонтированных, как минимум, в начале и конце каждого из участков, считают количество сформированных упомянутыми датчиками электрических сигналов, объединяют указанные сигналы в группы, соответствующие количеству осей в элементе подвижного состава и сопоставляют их с исходными данными, рассчитывают параметры сгруппированных сигналов с возможностью определения скорости прохождения и направления движения элементов вдоль датчиков и осуществляют привязку ко времени каждой из группы сигналов, сопоставленные с исходными данными и привязанные ко времени группы сигналов сопоставляют с индивидуальными идентификаторами каждого из элементов и записывают значение переменной Xi, по записанным переменным Xi в момент времени ΔТ формируют данные о местонахождении и использовании каждого из элементов подвижного состава.
2. Способ по п.1, отличающийся тем, что индивидуальный идентификатор включает информацию о количестве осей элемента.
3. Способ по п.1, отличающийся тем, что индивидуальный идентификатор включает информацию из натурного листа подвижного состава.
4. Способ по п.1, отличающийся тем, что индивидуальный идентификатор включает информацию из паспорта элемента.
5. Способ по п.1, отличающийся тем, что индивидуальный идентификатор включает допустимое время простоя элемента.
6. Способ по п.1, отличающийся тем, что элементы распределяют по участкам в зависимости от их дальнейшего назначения.
7. Способ по п.1, отличающийся тем, что скорость и направление движения определяют по задержке поступления электрических сигналов от датчиков.
8. Система мониторинга подвижного состава, содержащая колесные датчики, подключенные к измерительному устройству, отличающаяся тем, что колесные датчики смонтированы попарно на рельсах, как минимум, в начале и конце каждого из контролируемых блок-участков рельсовых путей и выполнены с возможностью счета количества осей элементов подвижного состава путем формирования электрических сигналов при прохождении вдоль упомянутых датчиков осей подвижного состава, каждая из пар датчиков соединена с контроллерами и через шлюзы, выполненные с возможностью обмена данными, с блоком сбора и обработки данных, к которому также подключены блок хранения данных и интерфейс пользователя, к контроллерам подключены модули определения направления и оперативные запоминающие устройства.
9. Система по п.8, отличающаяся тем, что датчики смонтированы перед и после стрелочного перевода.
10. Система по п.8, отличающаяся тем, что шлюзы выполнены с возможностью обмена данными по проводным каналам связи.
11. Система по п.8, отличающаяся тем, что шлюзы выполнены с возможностью обмена данными по радиоканалу.
12. Система по п.8, отличающаяся тем, что датчики выполнены индуктивными.
13. Система по п.8, отличающаяся тем, что блок хранения данных выполнен в виде сервера.
| Способ оценки социальной активности человека | 2015 |
|
RU2640570C2 |
| US 4265419 A, 05.05.1981 | |||
| ОТКАЧИВАЮЩАЯ СИСТЕМА | 2011 |
|
RU2566349C2 |
| RU 2000978 C1, 15.10.1993 | |||
| Способ определения толщины гальванического покрытия | 1957 |
|
SU110354A1 |

