Изобретение относится к способам подводной навигации и может быть использовано для определения местоположения подводных объектов.
Известен способ определения местоположения подводных объектов, предусматривающий использование электроориентации, включающий возбуждение электромагнитного поля, определение параметров поля в точке приема и расчет координат точки приема (см. а.с. СССР №973089, кл. А 01 К 61/00, 1982).
Недостаток этого решения - возможность его применения только на расстояниях, не превышающих размеров передающей антенны.
Известен также способ определения местоположения подводных объектов, включающий возбуждение электромагнитного поля, определение параметров поля в точке приема и расчет координат точки приема относительно источника электромагнитного поля (см. статью В.Свейн "Электрическое поле помогает подводной навигации (S.W.Swain An Electric Field Aid to Underwater Navigation - IEEE Intern. Conference of Engineering in Ocean Environment Digest of techn. Papers, 1970, Sept., pp.122-124).
Недостаток этого решения - недостаточная дальность действия системы, реализующей такой способ.
Задача, на решение которой направлено заявленное решение, выражается в повышении дальнодействия системы, реализующей такой способ, и точности определения положения приемника относительно передатчика в местной системе координат.
Технический результат, достигаемый при решении поставленной задачи, выражается в повышении надежности при определении местоположения объекта и, соответственно, обеспечения возможности многократного гарантированного выхода подводного объекта в одну и ту же точку.
Поставленная задача решается тем, что способ определения местоположения подводных объектов, включающий возбуждение электромагнитного поля, определение параметров поля в точке приема и расчет координат точки приема относительно источника электромагнитного поля, отличается тем, что создаваемому электромагнитному полю придают эллиптическую поляризацию, в точке приема измеряют напряженность двух взаимно перпендикулярных электрических компонент поля, по результатам этих измерений рассчитывают величины большой и малой осей эллипса поляризации, по отношению которых определяют удаление приемника от точки излучения, и угол наклона большой оси эллипса поляризации относительно радиального направления, по которому определяют направление на точку излучения. Кроме того, частоту вращающегося поля выбирают такой, чтобы скин-слой был не больше 5 и не меньше 0,1.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию "новизна".
Приведенные в отличительной части формулы изобретения признаки решают следующие функциональные задачи.
Признаки "создаваемому электромагнитному полю придают эллиптическую поляризацию" обеспечивают формирование вращающегося электромагнитного поля, что в свою очередь обеспечивает всенаправленность его ориентации и упрощает разделение переменных (направления и дальности).
Признаки "в точке приема измеряют напряженность двух взаимно перпендикулярных электрических компонент поля", обеспечивают реализацию способа, поскольку обеспечивают независимость отношения осей эллипса поляризации от расстояния и направления на источник поля.
Признаки "по результатам этих измерений рассчитывают величины большой и малой осей эллипса поляризации, по отношению которых определяют удаление приемника от точки излучения, и угол наклона большой оси эллипса поляризации относительно радиального направления, по которому определяют направление на точку излучения", раскрывают содержание операций обработки полученных измерений, приводящих к определению точки приема.
Признаки второго пункта формулы изобретения обеспечивают достоверность "работы" способа независимо от параметров водной среды (например, ее солености).
На фиг.1 показана схема реализации способа; на фиг.2 показана зависимость угла наклона большой оси эллипса от β1r; на фиг.3 показана зависимость величины большой оси эллипса от β1r; на фиг.4 показана зависимость отношения осей эллипса от β1r.
На чертежах показаны передатчик электромагнитного поля 1 с передающей антенной 2, приемник 3 с приемной антенной 4, снабженной датчиком 5 направления магнитного поля Земли, и вычислительный блок 6.
Заявленный способ осуществляется следующим образом.
Передающая антенна 2 в простейшем случае может быть выполнена из двух ортогональных антенн, на которые подается синусоидальное напряжение со сдвигом фазы на 90 градусов (наиболее предпочтительный вариант ее выполнения - в виде мультиполя, известной конструкции), что обеспечивает эллиптическую поляризацию поля в точке приема, кроме того, положение передающей антенны фиксировано в пространстве, т.е. заранее известно и определено. Приемная антенна 4 в простейшем случае может быть выполнена из двух ортогональных электрических диполей.
В качестве передатчика электромагнитного поля 1 используют задающий генератор, формирующий два синусоидальных напряжения, сдвинутых по фазе на 90°, и двухканальный усилитель мощности.
В качестве приемника 3 используют двухканальный предварительный усилитель с полосовыми фильтрами, обеспечивающими предварительное выделение сигнала.
В качестве датчика 5 направления магнитного поля Земли используют известный компас с цифровым выходом.
Вектор напряженности электромагнитного поля в безграничной среде полностью определяется двумя компонентами - радиальной (Еr) и тангенциальной (Eθ):

где  I - ток в передающей антенне, l - эффективная длина передающей антенны, σ1 - электропроводность воды, r - расстояние от передающей антенны до точки приема, θ - угол между осью передающей антенны и направлением на точку приема, β1 - мнимая часть постоянной распространения
I - ток в передающей антенне, l - эффективная длина передающей антенны, σ1 - электропроводность воды, r - расстояние от передающей антенны до точки приема, θ - угол между осью передающей антенны и направлением на точку приема, β1 - мнимая часть постоянной распространения




Величину результирующего вектора напряженности поля определяют по формуле:
Е=(Еr 2+Еθ 2)0,5
Он наклонен относительно радиального направления на угол ψ, определяемый решением уравнения:

Данные, характеризующие поле передающей антенны, приведены на фиг.2-4.
Посредством передатчика электромагнитного поля 1 с передающей антенной 2, возбуждают в водной среде, вмещающей подводный объект, вращающееся электромагнитное поле с эллиптической поляризацией и частотой вращения, при которой скин-слой составляет не больше 5 и не меньше 0,1.
Посредством приемника 3 с приемной антенной 4 в точке приема измеряют напряженность двух взаимно перпендикулярных электрических компонент поля, а также, определяют направление магнитного поля Земли. Далее, по вышеприведенным зависимостям, посредством вычислительного блока 6 рассчитывают величины большой и малой осей эллипса поляризации, по отношению которых определяют удаление приемника от точки излучения, и угол наклона большой оси эллипса поляризации относительно радиального направления, по которому определяют направление на точку излучения.
Анализ фиг.2 показывает, что наклон большой оси эллипса поляризации дает более точные результаты на малых безразмерных расстояниях, где скорость его изменения максимальна. Отношение осей эллипса более пригодно для определения удаление приемника от точки излучения при β'>0,9. Погрешность определения величины удаления (при β' от 1 до 10) составляет 1/4000. При рабочей частоте системы 500 Гц, диапазон расстояний для указанных условий будет от 11,2 до 112 м, погрешность определения расстояния составит 0,03-0,26 м.



Изобретение относится к способам подводной навигации и может быть использовано для определения местоположения подводных объектов. Способ включает возбуждение электромагнитного поля, определение параметров поля в точке приема и расчет координат точки приема относительно источника электромагнитного поля. Создаваемому электромагнитному полю придают эллиптическую поляризацию, в точке приема измеряют напряженность двух взаимно перпендикулярных электрических компонент поля. По результатам этих измерений рассчитывают величины большой и малой осей эллипса поляризации, по отношению которых определяют удаление приемника от точки излучения и угол наклона большой оси эллипса поляризации относительно радиального направления, по которому определяют направление на точку излучения. При этом частоту вращающегося поля выбирают такой, чтобы скин-слой был не больше 5 и не меньше 0,1. Технический результат: повышение точности определения положения приемника. 1 з.п. ф-лы, 4 ил.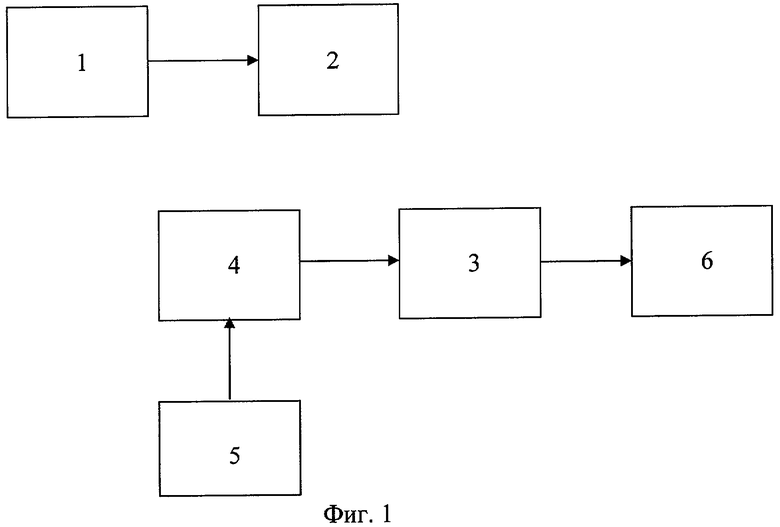
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| Устройство для моделирования задач электромагнитной индукции | 1980 |
|
SU968825A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1996 |
|
RU2107932C1 |
| СПОСОБ МОРСКОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ (ВАРИАНТЫ) | 2003 |
|
RU2236028C1 |
| US 4298840 А, 03.11.1981. | |||

