Изобретение относится к области гидроакустики и может быть использовано для контроля подводной обстановки вокруг охраняемых объектов, например буровых платформ, гидротехнических сооружений, судов, а также для обнаружения и сопровождения подводных объектов, вторгающихся в контролируемую акваторию натурного водоема, например в зону гидроакустического полигона, буровых платформ, судов.
Известно устройство контроля подводной обстановки аналогичного назначения, содержащее акустические приемники, установленные в земле в точках, расположенных на пути излучающих пучков, при этом в качестве источника звука в океане используется наклонная прибрежная часть земли, которая излучает пучки энергии на заданных частотах. Обработка отраженного сигнала позволяет осуществлять контроль подводной обстановки и обнаруживать подводные объекты в заданной области натурного водоема (Патент США N4183009, кл. 367-117 (Н04В 11/00), 1980 г.).
Недостатками этого устройства являются ограниченность его применения вблизи прибрежной зоны океана, а также невысокая чувствительность в связи с использованием отраженного (рассеянного) от объекта излучения.
Известно устройство контроля подводной обстановки, например для обнаружения вторжения подводного объекта в контролируемую область натурного водоема, содержащее гидроакустические излучатели различных зон контролируемой водной акватории и приемники акустического сигнала, провзаимодействующего с подводным объектом, а также блок определения местоположения, курса и скорости движения объекта по параметрам принятого сигнала (Патент США №4319349, МПК G01S 15/04, 1982 г.).
Недостатками устройства являются малое соотношение сигнал/шум в принимаемом сигнале, ввиду использования рассеянного излучения и отсутствия скрытности в процессе поиска нарушителя.
Известна гидроакустическая станция контроля подводной обстановки, например, для обнаружения вторжения подводного объекта в контролируемую область натурного водоема, содержащее гидроакустический излучатель различных зон контролируемой водной акватории и приемник акустического сигнала, провзаимодействующего с подводным объектом, блок определения местоположения, курса и скорости движения объекта по параметрам принятого сигнала, а также систему отражателей, расположенных вдоль эллиптической поверхности, в фокусах которой размещены гидроакустический излучатель и гидроакустический приемник, причем последний выполнен с равномерной характеристикой направленности (Патент РФ №2150123, МПК G01S 3/80, G01S 15/04, 16.06.1999 г.).
Недостатками устройства являются сложность расстановки системы отражателей в контролируемой области принимаемом сигнале, ввиду использования рассеянного излучения и отсутствия скрытности в процессе поиска нарушителя.
Наиболее близким по технической сущности и достигаемому результату (прототипом) к предлагаемому является известная гидроакустическая станция контроля подводной обстановки, включающая приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, соединяющий приемно-излучающую антенну с надводным блоком обработки и визуализации. (Ю.А. Корякин и др. Корабельная гидроакустическая техника. С.-П., Наука, 2004 г., стр. 340).
Недостатком известного устройства является ограниченная дальность обнаружения и недостаточная точность определения координат цели на рубежах повышенной ответственности.
Техническим результатом изобретения является повышение дальности обнаружения и точности определения координат цели на рубежах повышенной ответственности.
Технический результат достигается за счет того, что в гидроакустической станции контроля подводной обстановки, включающей приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, коммутатор и генератор вместе с приемно-излучающей антенной размещены в едином подводном модуле, в который дополнительно введены блок аналого-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналого-цифровых преобразователей, и блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации через подводный кабель, при этом в состав гидроакустической станции введена донная протяженная антенна, состоящая из совокупности последовательно соединенных приемных модулей, шины данных, блока управления, интерфейса и подводного кабеля, подключенного к блоку обработки и визуализации.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема предлагаемого устройства.
Устройство работает следующим образом.
Излучаемый сигнал, формируемый в подводном модуле 1 генератором 3, через коммутатор 4 возбуждает элементы приемно-излучающей антенны 2. Конструкция антенны обеспечивает облучение всего требуемого сектора в горизонтальной и вертикальной плоскости. Отраженные сигналы принимаются элементами антенны 2 и через коммутатор 4 поступают на блок аналого-цифровых преобразователей 5. Формирование управляющих сигналов для генератора и АЦП, синхронизация их работы, прием оцифрованных сигналов производится блоком управления 6, который через стандартный интерфейс 7, например Ethernet, и подводный кабель 8 передает принятые сигналы на надводный блок обработки и визуализации 9, имеющий совместимый интерфейс. В качестве этого может использоваться персональный компьютер. Одновременно на блок обработки и визуализации 9 через подводный кабель 15 и интерфейс 14 непрерывно поступают сигналы от донной протяженной антенны 10. Эти сигналы синхронно вырабатываются каждым приемным модулем 11 и по шине данных 12 собираются в блоке управления 13. Синхронизация выборки обеспечивается этим же блоком управления, формирующим команду на выборку сигналов, передаваемой по двунаправленной шине данных 12 на каждый приемный модуль 11. Каждый модуль 11 антенны состоит из последовательно соединенных гидрофона, аналого-цифрового преобразователя и контроллера, подключаемого к шине данных 12. В качестве гидрофона может использоваться пьезоэлемент или пьезополимерная пленка. Расстояние между отдельными гидрофонами, а также ширина их сектора обзора определяются таким образом, чтобы обеспечить непрерывную зону приема на заданном рубеже.
Обработка сигналов, поступающих от антенны 2, производится в блоке 9 известным способом и заключается в формировании веера характеристик направленности антенны, вычислении корреляционной функции принятого сигнала с излученным и определению точек, в которых амплитуда корреляционной функции превышает пороговый уровень, отсекающий помеху. Совокупность точек, превысивших порог, отображается в декартовых координатах на дисплее блока обработки и визуализации 9.
Сигналы с каждого приемного модуля донной протяженной антенны также подвергаются корреляционной обработке с излученным сигналом. Затем формируется пороговый уровень и определяются положения корреляционных пиков, превысивших этот уровень. Положение первого по времени корреляционного пика принимается за время прихода гидролокационного сигнала основной антенны. Положения остальных корреляционных пиков отсчитывается относительно этого времени. Одним из известных способов производится селекция движущихся целей, после которой сохраняются только корреляционные пики, положения которых на оси времен изменяются от посылки к посылке.
Времена задержки Δτ отраженного от движущейся цели сигнала относительно сигнала, пришедшего по прямому лучу, пересчитываются в текущие координаты цели по глубине и дистанции следующим образом. В условиях свободного пространства времени задержки Δτ соответствует положение цели (Ц) на эллипсе, в фокусах которого находятся излучатель (И) и приемник (П) (Фиг. 2). Расстояние от приемника до цели RПЦ и угол α, под которым цель наблюдается приемником, связаны уравнением:
где RИП - расстояние между излучателем и приемником;
с - скорость звука в воде;
RИЦ - расстояние между излучателем и целью:

где β - угол наклона линии, соединяющей излучатель и приемник, относительно горизонтальной плоскости.
Неоднозначность положения цели на эллипсе устраняется при задании глубины цели НЦ. В этом случае расстояние между приемником и целью выражается через угол α:
где НП - глубина погружения приемника.
После подстановки соотношений (2) и (3) в уравнение (1) численным методом вычисляется угол α и затем по формуле (3) расстояние от приемника до цели RПЦ.
По приращению оценок дистанции до цели между двумя посылками гидролокационного сигнала, выполненными в моменты времени t1 и t2, можно оценить радиальную составляющую скорости цели:

Таким образом, каждой предполагаемой глубине цели НЦ ставится в соответствие радиальная скорость движения цели ν(НЦ). Принятие решения о глубине, дистанции и скорости движения цели производится с учетом полученных оценок скорости цели от глубины и априорных сведений о возможных значениях этих параметров для предполагаемой цели.
Дополнительную информацию о координатах цели дает амплитуда корреляционного пика от движущейся цели. В момент прохождения цели над приемником корреляционный максимум принимает максимальное значение. В этом случае из уравнения (1) с учетом формул (2) и (3), в которых полагается α=π/2, получается однозначная оценка глубины цели НЦ.
Благодаря существенному приближению приемной антенны к цели и, следовательно, сокращению потерь на затухание отраженного от цели сигнала подсветки отношение сигнал/помеха и соответственно вероятность обнаружения цели возрастают.
Погрешность определения координат цели в горизонтальной плоскости определяется шагом между приемными элементами дополнительной антенны и при достаточно малом шаге может быть существенно снижена по сравнению с погрешностью определения координат основной антенной, которая постоянно возрастает с удалением цели от этой антенны. Кроме того, использование дополнительной антенны позволяет определять и глубину погружения цели, что практически невозможно при использовании лишь основной антенны, не имеющей направленности в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ВНЕШНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2573173C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2568339C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2576349C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2558017C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2568338C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для контроля подводной обстановки вокруг охраняемых объектов, например буровых платформ, гидротехнических сооружений, судов, а также для обнаружения и сопровождения подводных объектов, вторгающихся в контролируемую акваторию натурного водоема, например в зону гидроакустического полигона, буровых платформ, судов. Технический результат: повышение дальности обнаружения и точности определения координат цели на рубежах повышенной ответственности. Сущность: в гидроакустической станции контроля подводной обстановки, включающей приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, коммутатор и генератор вместе с приемно-излучающей антенной размещены в едином подводном модуле, в который дополнительно введены блок аналого-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналого-цифровых преобразователей, и блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации через подводный кабель, при этом в состав гидроакустической станции введена донная протяженная антенна, состоящая из совокупности последовательно соединенных приемных модулей, шины данных, блока управления, интерфейса и подводного кабеля, подключенного к блоку обработки и визуализации. 1 ил.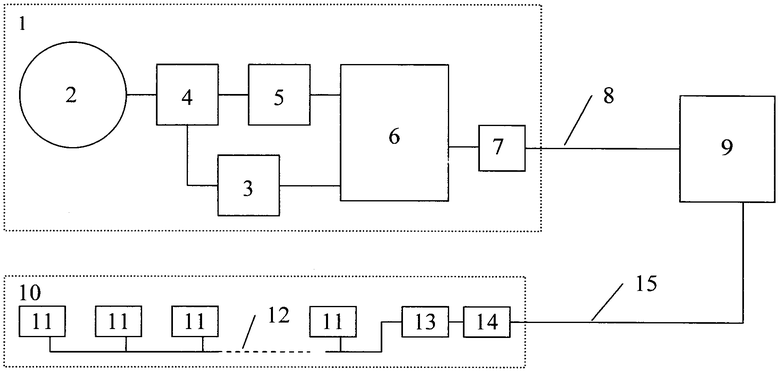
Гидроакустическая станция контроля подводной обстановки, включающая приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, отличающаяся тем, что коммутатор и генератор вместе с приемно-излучающей антенной размещены в едином подводном модуле, в который дополнительно введены блок аналого-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналого-цифровых преобразователей, и блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации через подводный кабель, при этом в состав гидроакустической станции введена донная протяженная антенна, состоящая из совокупности последовательно соединенных приемных модулей, шины данных, блока управления, интерфейса и подводного кабеля, подключенного к блоку обработки и визуализации.
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| US5305286 A, 19.04.1994 | |||
| СТАНЦИЯ КОНТРОЛЯ УРОВНЕЙ ШУМОВ МОРСКИХ НЕФТЕГАЗОВЫХ КОМПЛЕКСОВ | 2011 |
|
RU2480789C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| US5237541 A, 17.08.1993. | |||

