Изобретение относится к области навигации по сигналам радиоизлучающих объектов с известными координатами, и может быть использовано в качестве альтернативного способа определения угловой ориентации летательного аппарата (ЛА) в пространстве.
Известен способ определения угловой ориентации объекта по сигналам глобальных спутниковых радионавигационных спутниковых систем (аналог) [1], основанный на приеме сигналов от космических аппаратов глобальных спутниковых радионавигационных спутниковых систем на разнесенные антенны, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, подборе значений целочисленных неоднозначностей измерений фазовых сдвигов, решении системы уравнений для определения угловой ориентации, при этом искомая угловая ориентация объекта определяется из условия максимума функции правдоподобия.
Недостатком способа является необходимость просмотра большого количества комбинаций целочисленных неоднозначностей измерений фазовых сдвигов, в котором не учитывается информация о положении космических аппаратов, векторов, соединяющих антенны, а также относительно низкая точность измерения углов ориентации ЛА в пространстве, связанная с отсутствием согласования по поляризации между приемной антенной системой (АС) и полем приходящей электромагнитной волны в условиях естественных, преднамеренных и не преднамеренных помех.
Известен способ определения угловой ориентации летательных аппаратов (аналог) [2], согласно которому обеспечивается повышение помехоустойчивости к воздействию преднамеренных помех, за счет оптимизированной пространственной фильтрации при приеме сигналовкосмических аппаратов глобальной навигационной спутниковой системы, основанной на критерии минимума выходной мощности. Способ отличается вычислением эталонных разностей фаз Δϕэт, значения которых определяют по разности сигналов двух адаптивных антенных решеток (ААР), при этом учитывается амплитудно-фазовое смещение, вносимое каждой ААР. Устранено противоречие при реализации адаптивной антенной системы, связанное с одновременным выполнением пространственной фильтрации помех и угловой ориентации ЛА путем замены М антенных элементов на М ААР.
Недостатком способа является необходимость использования распределенной многоэлементной антенной решетки при приеме сигналов космических аппаратов, а также относительно низкая точность измерения углов ориентации ЛА в пространстве, связанная с отсутствием согласования по поляризации между приемной антенной системой (АС) и полем приходящей электромагнитной волны в условиях естественных, преднамеренных и не преднамеренных помех.
Наиболее близким по технической сущности к заявляемому является способ определения угловой ориентации летательного аппарата в среде глобальных радионавигационных систем угловой ориентации объекта по радионавигационным сигналам космических аппаратов (прототип) [3].
Способ - прототип позволяет определить угловую ориентацию по сигналам космических аппаратов глобальных спутниковых радионавигационных систем, на основе приема сигналов от космических аппаратов на антенны, количеством не менее трех, расположенных на объекте так, чтобы они не лежали на одной прямой, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, подборе целочисленных неоднозначностей, позволяющем определить возможные значения угловой ориентации, определении значения искомой угловой ориентации объекта по максимуму функции правдоподобия, согласно изобретению возможные значения угловой ориентации определяют с использованием измеренных фазовых сдвигов и выражений, учитывающихположение космических аппаратов, векторов, образованных линиями, соединяющими антенны, и их взаимную связь.
Недостатком способа является необходимость использования не менее трех, расположенных на объекте и разнесенных в пространстве антенных элемента при приеме сигналов космических аппаратов, относительно низкая точность измерения углов ориентации летательного аппарата, в условиях воздействия естественных, преднамеренных и не преднамеренных, при нарушения работы или выходе из строя приемника сигналов глобальных навигационных спутниковых систем, а также при отсутствии согласования по поляризации между приемной АС и полем приходящей электромагнитной волны.
Техническим результатом изобретения является повышение точности определения угловой ориентации летательного аппарата в условиях воздействия естественных, преднамеренных и не преднамеренных помех, при нарушении работы или выходе из строя приемника сигналов глобальных навигационных спутниковых систем, за счет обеспечения согласования по поляризации между приемной антенной системой и полем приходящей электромагнитной волны от радиоизлучающего объекта с известными координатами.
Поставленная цель достигается тем, что в известном способе, заключающемся в приеме сигналов от независимых радиоизлучающих объектов с известными координатами с использованием антенной системы, установленной на летательном аппарате, измерении параметров сигналов от радиоизлучающих объектов с известными координатами, определении текущего углового положения объекта, на основе измеренных параметров сигналов от радиоизлучающих объектов, при этом в качестве антенной системы используют триортогональную вибраторную антенную систему (ТОВАС). Измерения и расчеты выполняют в декартовой системе координат (ДСК) OXYZ. Выбирают N≥3 независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами и эллиптически поляризованнымирадиоизлучениями. Измеряют в момент времени и с помощью ТОВАС ортогональные компоненты Ex,n(t1) Ey,n(t1) Ez,n(t1) векторов напряженности электрического поля En(t1) принятых сигналов от каждого из N независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами, где n=1…N - номер радиоизлучающего объекта. Измеряют в моменты времени t2 с помощью ТОВАС ортогональные компоненты Ex,n(t2), Еу,n(t2), и Ez,n(t1) векторов напряженности электрического поля En(t2) принятых сигналов от каждого из N независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами. Определяют ориентацию векторов напряженности электрического поля En(t1) и En(t2) в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Ex,n(t1) Ey,n(t1) Ez,n(t1) и Ex,n(t2) Ey,n(t2) Ez,n(t2). Определяют параметры направляющих векторов tn путем векторного произведение пар векторов En(t1)и En(t2) Определяют значения элементов матрицы углов поворота летательного аппарата, определяют текущее угловое положение летательного аппарата по значениям элементов матрицы углов поворота.
Благодаря указанной новой совокупности существенных признаков при реализации заявленного способа обеспечивается согласование по поляризации между приемной ТОВАС и полем приходящей электромагнитной волны радиоизлучающего объекта с известными координатами, что исключает возникновение дополнительных ошибок в определении углового положения летательного аппарата, следовательно, указывает на возможность повышения точности определения угловой ориентации летательного аппарата, в условиях искажения или подавления навигационного поля спутниковых радионавигационных систем GPS/ГЛОНАСС.
Дополнительно, определение ориентации вектора напряженности электрического поля в пространстве, позволяет исключить операции сканирования по пространственным и поляризационным параметрам, что позволит сократить временные затраты при измерении параметров сигналов от радиоизлучающих объектов с известными координатами.
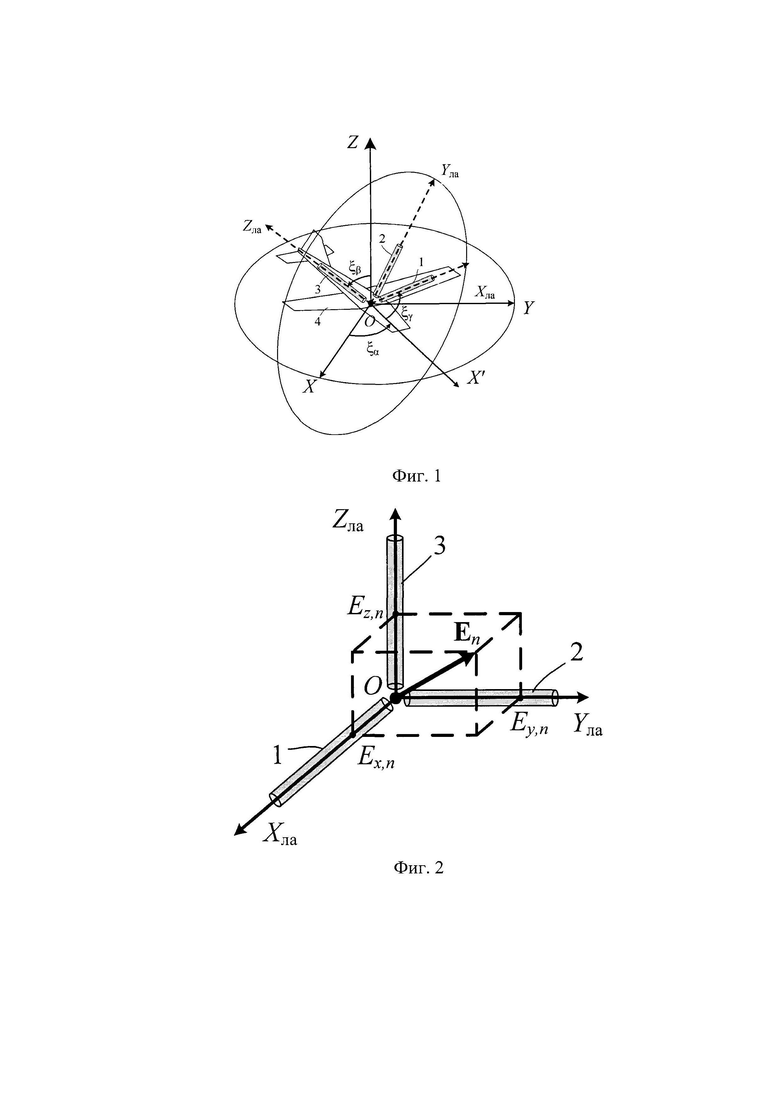
Заявленное изобретение поясняется чертежами, на которых показаны: на фиг. 1 углы ориентации летательного аппарата в трехмерном пространстве;
на фиг. 2 ориентация вектора напряженности электрического поля в трехмерном пространстве относительно ТОВАС;
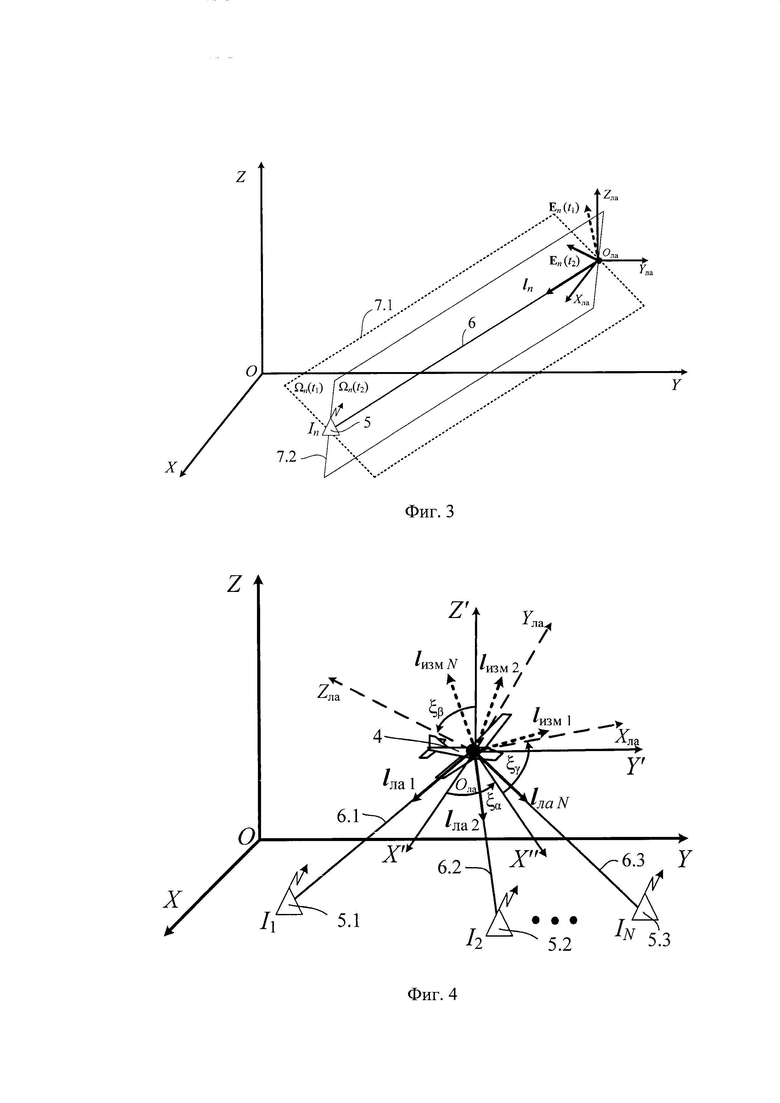
на фиг. 3 графическое представление определения линии положения радиоизлучающего объекта с известными координатами;
на фиг. 4 графическое представление способа определения угловой ориентации летательного аппарата в пространстве;
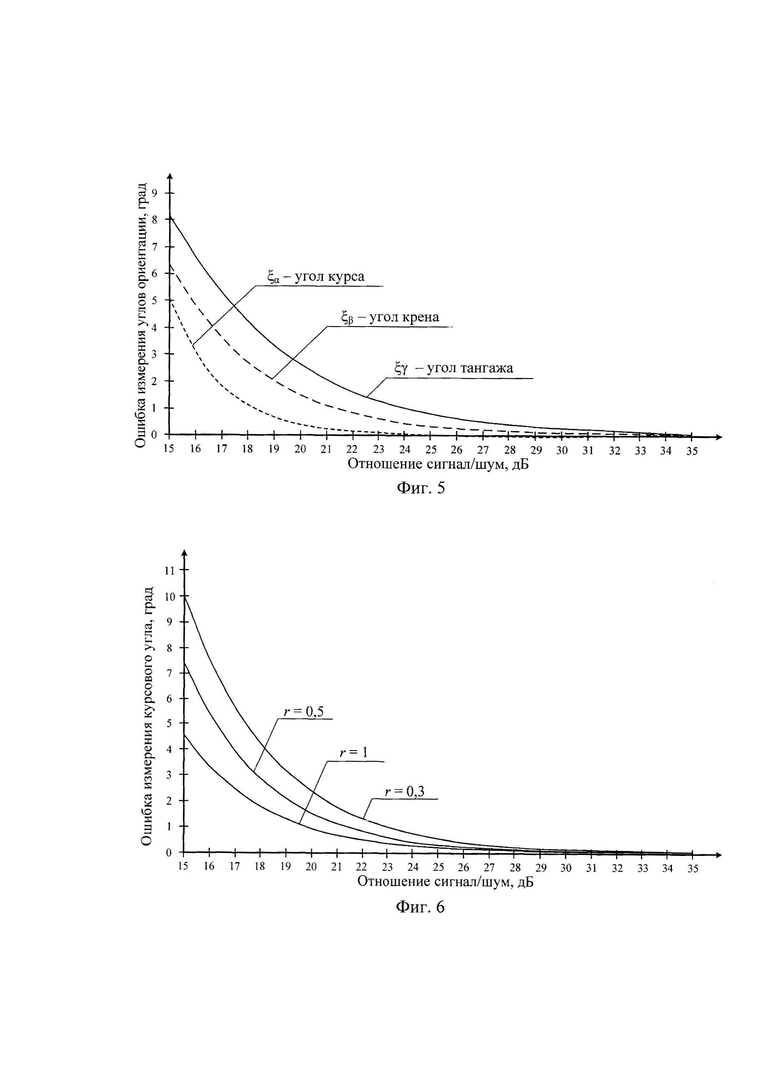
на фиг. 5 зависимость ошибки измерения углов ориентации летательного аппарата в пространстве от отношения сигнал/шум;
на фиг. 6 зависимость ошибки измерения угла курса от отношения сигнал/шум при различных коэффициентах эллиптичности принимаемого радиосигнала.
Использование ЛА в качестве платформы для развертывания средств радиомониторинга связано с необходимостью решения ряда проблем, основными из которых являются: увеличение уровня помех, низкое отношение сигнал/шум на входе бортового радиоприемного устройства; ограниченные массогабаритные показатели полезной нагрузки на ЛА, которые не позволяют разместить на нем эффективные антенные системы и многоканальные РПУ; нестабильность ориентации ЛА в пространстве, которая приводит к резкому увеличению ошибок пеленгования и к снижению точности определения координат источников радиоизлучений (ИРИ).
Одной из основных систем бортовой аппаратуры управления ЛА является система определения углов ориентации ЛА в пространстве относительно выбранной опорной системы координат. Известны и широко применяются способы определения высоты, скорости и угла сноса ЛА с помощью бортового радиолокационного оборудования, бесплатформенных систем ориентации, гироскопических, магнитометрических, видеосистем, пирометрических и других систем [4].
В настоящее время проблема повышения точности определения углов ориентации ЛА решается путем комплексирования систем ориентации различных типов, в том числе использование сигналов спутниковых радионавигационных систем GPS/ГЛОНАСС. Однако, в условиях искажения или подавления навигационного поля спутниковых радионавигационных систем GPS/ГЛОНАСС, необходимо предусмотреть резервную систему определения углов ориентации ЛА.
Традиционные комплексы пассивной радиолокации (радиомониторинга) реализуют угломерные способы и методы определения координат объекта, которые основаны на ортогональности фронта фаз к направлению на ИРИ. Основой данных способов пеленгования радиосигналов принято считать различие времени прихода радиоволны в разнесенные точки пространства. Повышение точности пеленгования в большинстве случаев достигается увеличением базы пеленгаторной АС, то есть разнесением в пространстве ее антенных элементов (АЭ), что невозможно ввиду ограниченных габаритных размеров ЛА [5,6].
Известен другой класс методов определения координат излучающего объекта, основанный на ортогональности векторов напряженности электрического и магнитного поля [7, 8], которые могут быть использованы для решения обратной задачи координатометрии, то есть для определения собственных координат и ориентации ЛА в пространстве. Указанные методы становится особо актуальным при использовании малогабаритных летательных аппаратов в качестве платформы для развертывания средств пеленгования ИРИ.
В рассматриваемых способах используется информация о местоположении ИРИ, содержащаяся в пространственной ориентации вектора напряженности электрического поля Е в точке приема. Согласно способа ОМП ИРИ с борта летательного аппарата [7] существует возможность определения направления на реперные радиостанции с помощью, сосредоточенной ТОВАС, с использованием которой определяют поляризацию радиосигнала в точке приема.
Пространственная ориентация вектора напряженности электрического поля на летательном аппарате Е в пространстве характеризуется тремя его ортогональными составляющими в системе координат ЛА, которые определяется с помощью, сосредоточенной ТОВАС, состоящей из трех антенных элементов АЭх, АЭу, AЭz.
Существуют различные методы определения ориентации твердого тела в трехмерном пространстве, каждый из которых имеет свои достоинства и недостатки. Наиболее распространенным методом определения ориентации твердого тела в трехмерном пространстве является метод углов Эйлера, согласно которому твердое тело может быть переведено из начального положения в любое конечное положение с помощью трех последовательных поворотов вокруг осей OZ, OY, ОХ на соответствующие углы курса  крена
крена  и тангажа
и тангажа  (см. фиг. 1).
(см. фиг. 1).
Измерения и расчеты выполняют в топоцентрической ДСК OXYZ и ДСК связанной с летательным аппаратом ОлаХлаYлаZла в которой центр координат Ола совмещен с центром ТОВАС, оси ОлаХла, ОлаYла, ОлаZла направленны по ортогональным АЭх, АЭу, AЭz соответственно (см. фиг.1).
Выбирают N≥3 независимых радиоизлучающих объектов (In) с известными координатами (xn; yn, zn) и эллиптически поляризованными радиоизлучениями, где n=1…N- номер радиоизлучающего объекта.
Измеряют параметры сигналов от радиоизлучающих объектов с известными координатами в связанной с летательным аппаратом ДСК, для чего в моменты времени t1 и t2 измеряют значения ортогональных компоненты Exn, Eyn и Ezn не менее двух векторов напряженности электрического поля Еn в общем случае эллиптически поляризованного аналогового радиосигнала на АЭх, АЭу,и AЭz ТОВАС соответственно.
Определяют ориентацию векторов напряженности электрического поля En(t1) и Ent2) в ДСК OXYZ путем векторного сложения соответствующихортогональных компонент Ех,n(t1), Еу,n(t1) и Ez,n(t1), определяют параметры направляющего вектора tn путем векторного произведение векторов En(t1), En(t2) (фиг. 2).
На фиг. 1 и фиг. 2 приняты следующие обозначения антенных элементов сосредоточенной ТОВАС: 1 - АЭх,2 - АЭy,3 - АЭz, которые образуют ДСК связанную с летательным аппаратом OлаXлаYлаZла, а оси ОлаХла, OлаYла OлаZла направленны по ортогональным АЭх, АЭу, АЭz соответственно, а также летательный аппарат, углы ориентации которого определяют - 4.
Определяют параметры направляющего вектора ln который в соответствии с поляризационным способом пеленгования ИРИ [7, 8] характеризует линию положения излучающего объекта в пространстве и может быть однозначно определен параметрами линии пересечения вспомогательных плоскостей Ωn(t1) и Ωn(t2), которые проходят через точку с координатами радиоизлучающего объекта In (xn; yn zn) и перпендикулярны векторам напряженности электрического поля En(t1) и En{t2), измеренным в моменты времени t1 и t2 соответственно (фиг. 3).
На фиг. 3 приняты следующие обозначения: 5 - радиоизлучающий объект с известными координатами; 6 - линия положения излучающего объекта в пространстве; 7.1 - вспомогательная плоскость Ωn(t1) проходящая через точку с координатами радиоизлучающего объекта In (xn; yn; zn) и перпендикулярная вектору напряженности электрического поля En(t1), измеренному в момент времени t2 - вспомогательная плоскость Ωn(t2), проходящая через точку с координатами радиоизлучающего объекта In (xn; yn zn) и перпендикулярная вектору напряженности электрического поля En (t2), измеренному в момент времени h.
Учитывая, что в прямоугольной системе координат направляющий вектор не отделим от прямой линии [9] при определении параметров линии положения излучающего объекта достаточно определить параметры направляющего вектора. На основе теории электромагнитного поляД. К. Максвелла для нахождения параметров направляющего вектора ln необходимо найти векторное произведение векторов En (t1) и En (t2):

На фиг. 3 отображено графическое представление определения линий положения радиоизлучающего объекта с известными координатами ln, как линии пересечения вспомогательных плоскостей Ωn(t1) и Ωn(t2), проходящих через точку с координатами радиоизлучающих объектов In (xn; yn zn) и перпендикулярных соответствующим векторам напряженности электрического поля En (t1) и En (t2), измеренных в моменты времени t1 и t2 соответственно. Ориентацией и перемещением в пространстве летательного аппарата за указанный временной интервал можно пренебречь.
Зная координаты ЛА и координаты радиоизлучающих объектов (реперных станций), возможно определить параметры истинного направляющего вектора на реперную станцию в топоцентрической системе координат (lлa х n; lлa у n; lлa z n) согласно выражений [9]:

где (хла ула zла) - координаты ЛА; (xn;yn; zn) - координаты n-го радиоизлучающего объекта (реперной станции).
Значения углов ориентации ЛА в пространстве заложены в несоответствии измеренных lизм и истинных lлa направляющих векторов на реперную станцию, и находятся в результате решения системы уравнений, полученной путем приравнивания измеренных и истинных значений направляющих векторов на реперные станции (фиг.4).
На фиг.4 отображено графическое представление способа определения угловой ориентации ЛА в пространстве и приняты следующие обозначения OлаXлаYлаZла - ДСК связанная с летательным аппаратом, OXYZ-топоцентрическаяДСК, OX'Y'Z' - ДСК полученная параллельным переносом осей топоцентрической ДСК с новым центром в точке координат ЛА (хла; ула; zла).
На фиг. 4 цифрами обозначены: 4 - летательный аппарат, углы ориентации которого определяют; 5.1 - первый радиоизлучающий объект с известными координатами; 5.2 - второй радиоизлучающий объект с известными координатами; 5.3 - радиоизлучающий объект с известными координатами под номером N; 6.1 - линия положения первого излучающего объекта в пространстве; 6.2 - линия положения второго излучающего объекта в пространстве; 6.3 - линия положения излучающего объекта под номером N пространстве;
Измеренные параметры направляющего вектора (lизмxn; lизмyn; lизмzn) в связанной СК преобразуют в топоцентрическую СК за счет последовательного перемножения измеренного направляющего вектора lлa на три матрицы поворота  соответствующие углам Эйлера
соответствующие углам Эйлера 
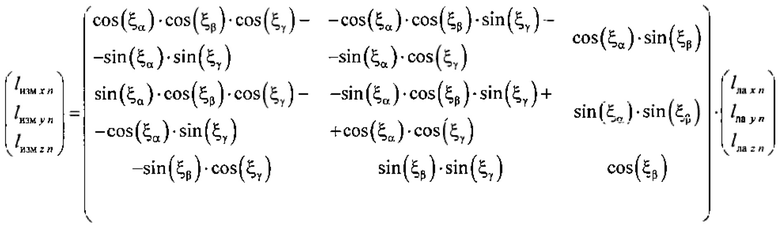
Таким образом принимая радиосигнал от n-ой реперной станций получают систему линейных уравнений:
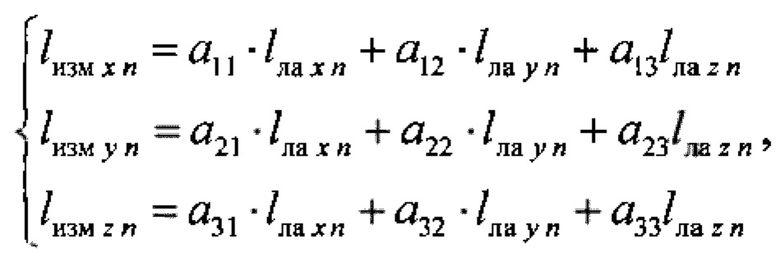
где a11; a12; a13; a21; a22; a23; a31; a32 a33; элементы матрицы углов Эйлера определяемые по формулам


Для нахождения значений элементов матрицы поворота, необходимо обеспечить прием сигналов минимум от трех реперных станций, в результате будут получены три системы линейных уравнений, которые после группировки по неизвестным переменным примут вид:
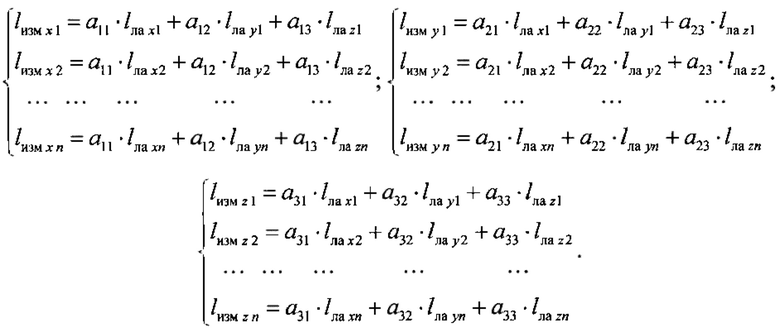
Решая данные системы уравнений одним из известных методов например, матричным методом, определяются значения элементов матрицы поворота, после чего находят углы ориентации ЛА, которые определяются выражениями:

Проверка возможности достижения сформулированного технического результата была проведена путем компьютерного моделирования [10], результаты которого подтвердили возможность определения углов ориентации ЛА в пространстве. Точность измерения углов ориентации ЛА в пространстве зависит от отношения сигнал/шум на входе радиоприемного устройства комплекса пассивной радиолокации (фиг. 5), а также от поляризационных параметров радиосигналов реперных источников радиоизлучений, таких как коэффициент эллиптичности (г) и угла наклона эллипса поляризации (фиг. 6).
Реализация разработанного способа преимущественно целесообразна при размещении ТОВАС на подвижном объекте, в частности на летательном аппарате, функционирующего условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех. Особенностью разработанного способа является использование в качестве координатно-информативного параметра поляризации радиоизлучения,
Точность определения углов ориентации ЛА по сравнению со способом прототипом предположительно составляет 10…15% в зависимости от количества радиоизлучающих объектов с известными координатами, топологии их взаимного размещения относительно ЛА, поляризационных параметров сигналов радиоизлучающих объектов и отношения сигнал/шум на входе радиоприемного устройства ЛА.
Источники информации:
1. Алешечкин A.M. Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. Патент №2446410 МПК G01S 5/02 (2010.01). Бюл. №9 от 27.03.12. Заявка №2010152184/07 от 20.12.10.
2. Давыденко А.С, Кудряшева П.А., Ошуев A.M., Смирнов П.Л., Терентьев А.В., Царик О.В., Шмидт М.В. Способ и устройство определения угловой ориентации летательных аппаратов. Патент №2740606. МПК G01S 5/02 (2010.01). Бюл. №2 от 15.01.21. Заявка №2020117700 от 18.05.20.
3. Корнев В.В., Чмутин Н.Ф. Способ определения угловой ориентации летательного аппарата в среде глобальных радионавигационных систем. Патент №2578671 МПК G01S 5/02 (2010.01). Бюл. №9 от 27.03.16. Заявка №2015108365/07 от 11.03.15.
4. Парамонов П.П., Жаринов И.О. Интегрированные бортовые вычислительные системы: обзор современного состояния и анализ перспективразвития в авиационном приборостроении // Научно-технический вестник информационных технологий, механики и оптики. 2013. №2(84). С.1-17.
5. Богдановский С.В., Симонов А.Н., Севидов В.В. Поляризационный способ определения ориентации БЛА // Успехи современной радиоэлектроники. 2017. №10. С.15-19.
6. Богдановский С.В., Симонов А.Н., Теслевич С.Ф., Махетов А.Б. Способ определения координат беспилотного летательного аппарата на основе поляризационной обработки радиоизлучений реперных станций // Наукоемкие технологии. 2017. Т. 18, №11. С.16-21.
7. Богдановский С.В., Ледовская К.Г., Севидов В.В., Симонов А.Н., Григорьев В.В. Способ поляризационного пеленгования радиосигналов с использованием триортогональной антенной системы. Патент №2713866 МПК G01S 5/04 (2006.01). Бюл. №4 от 07.02.20. Заявка №2019110575 от 09.04.2019.
8. Богдановский С.В., Ледовская К.Г., Севидов В.В., Симонов А.Н. Способ поляризационного пеленгования радиосигналов с использованием триортогональной антенной системы. Патент №2702102 МПК G01S 5/04 (2006.01). Бюл. №28 от 04.10.19. Заявка №2018136463 от 15.10.2018.
9. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. -М.: Наука, 1973. - 832 с.
10. Богдановский СВ. Программный модуль расчета углов ориентации летательного аппарата в пространстве на основе поляризационных измерений. Свидетельство о регистрации программы для ЭВМ №2023684577 Бюл. №11 от 16.11.23. Заявка №2023684107 от 14.11.23.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения собственного местоположения объекта в пространстве | 2023 |
|
RU2815168C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2714502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2023 |
|
RU2822686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
Изобретение относится к области навигации по сигналам радиоизлучающих объектов с известными координатами и может быть использовано в качестве альтернативного способа определения угловой ориентации летательного аппарата в пространстве. Технический результат заключается в повышении точности определения угловой ориентации летательного аппарата в условиях воздействия естественных, преднамеренных и непреднамеренных помех, при нарушении работы или выходе из строя приемника сигналов глобальных навигационных спутниковых систем. Заявленный способ основан на приеме N≥3 независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами и эллиптически поляризованными радиоизлучениями с использованием триортогональной вибраторной антенной системы (ТОВАС), установленной на летательном аппарате. С помощью ТОВАС в каждый из двух моментов времени t1 и t2 измеряют три ортогональные компоненты Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2) векторов напряженности электрического поля En(t1) и En(t2) принятых сигналов от каждого из N независимых радиоизлучающих объектов с известными координатами. Определяют ориентацию векторов напряженности электрического поля En(t1) и En(t2) в декартовой системе координат OXYZ. Определяют параметры направляющих векторов ln. Определяют значения элементов матрицы углов поворота летательного аппарата и по их значениям определяют текущее угловое положение летательного аппарата. 6 ил.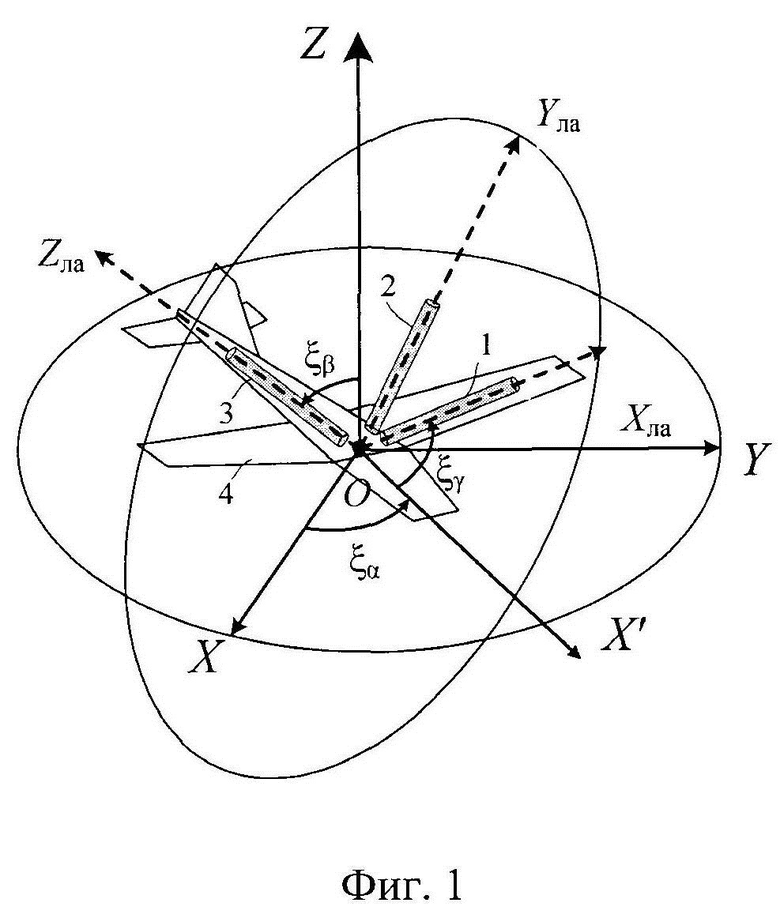
Способ определения угловой ориентации летательного аппарата, заключающийся в том, что устанавливают на летательном аппарате антенную систему, измеряют параметры сигналов от независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами, на основе измеренных параметров сигналов от радиоизлучающих объектов определяют текущее угловое положение объекта, отличающийся тем, что в качестве антенной системы используют триортогональную вибраторную антенную систему (ТОВАС), измерения и расчеты выполняют в декартовой системе координат (ДСК) OXYZ, выбирают N≥3 независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами и эллиптически поляризованными радиоизлучениями, измеряют в момент времени t1 с помощью ТОВАС ортогональные компоненты Ex,n(t1), Ey,n(t1), Ez,n(t1) векторов напряженности электрического поля En(t1) принятых сигналов от каждого из N независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами, где n=1…N - номер радиоизлучающего объекта, измеряют в моменты времени t2 с помощью ТОВАС ортогональные компоненты Ex,n(t2), Ey,n(t2) и Ez,n(t2) векторов напряженности электрического поля En(t2) принятых сигналов от каждого из N независимых пространственно-разнесенных радиоизлучающих объектов с известными координатами, определяют ориентацию векторов напряженности электрического поля En(t1) и En(t2) в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2), определяют параметры направляющих векторов ln путем векторного произведения пар векторов En(t1) и En(t2) , определяют значения элементов матрицы углов поворота летательного аппарата, определяют текущее угловое положение летательного аппарата по значениям элементов матрицы углов поворота.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ ГЛОБАЛЬНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2578671C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2779283C1 |
| DE 102009059694 B3, 17.03.2011 | |||
| US 5995043 A, 30.11.1999 | |||
| CN 104050362 A, 17.09.2014. | |||

