Изобретение относится к области электромеханики и может быть использовано для привода различных устройств в прецизионном приборостроении, при медико-биологических исследованиях и в системах нано-технологий.
Известен механизм перемещений (RU, патент, 2115995, кл. H 01 L 41/08), содержащий пьезоэлектрический элемент с размещенными на нем электродами, подвижный и соединительный элементы, опору, относительно которой одним концом зафиксирован соединительный элемент, другим концом жестко скрепленный с концом подвижного элемента, установленного с возможностью углового поворота. Пьезоэлектрический элемент выполнен преимущественно цилиндрической формы с радиальной поляризацией и незамкнуто охвачен по периметру нерастяжимым соединительным элементом, подвижный элемент выполнен в виде жесткого стержня, поворачивающийся конец которого тягой, направленной под углом к стержню, связан также с соединительным элементом.
Недостатками устройства-аналога является механическая непрочность конструкции, связанная с механическими напряжениями, возникающими при деформации пьезоэлемента между ним и соединительным элементом.
Наиболее близким по технической сущности к заявляемому устройству является позиционирующее устройство (RU, патент, 2080631, кл. H 01 L 41/08), выполненное в виде монолитной симметричной Н-образной стержневой конструкции, состоящей из стержней с упругими цилиндрическими шарнирами на концах и в середине стержней. Боковые стержни ортогональны центральному стержню и жестко соединены с корпусом устройства через линейные пьезоэлектрические элементы. В середине центрального стержня закреплено звено, несущее рабочий орган.
Недостатками устройства-прототипа являются большие габариты и малые, совершаемые устройством относительные перемещения, и, как следствие, низкая эффективность устройства, а также невысокая точность.
Задачей данного изобретения является создание миниатюрного устройства, которое сможет совершать большие относительные перемещения с высокой точностью.
Патентуется пьезопривод, содержащий рабочее перемещаемое звено, симметричную стержневую конструкцию, линейные пьезоэлектрические элементы, отличающийся тем, что он снабжен Т-образной опорой, и рабочее перемещаемое звено выполнено также Т-образным, причем они расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу, кроме того, стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент, при этом на перемещаемом рабочем звене также установлен пьезоэлектрический элемент, боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена соответственно.
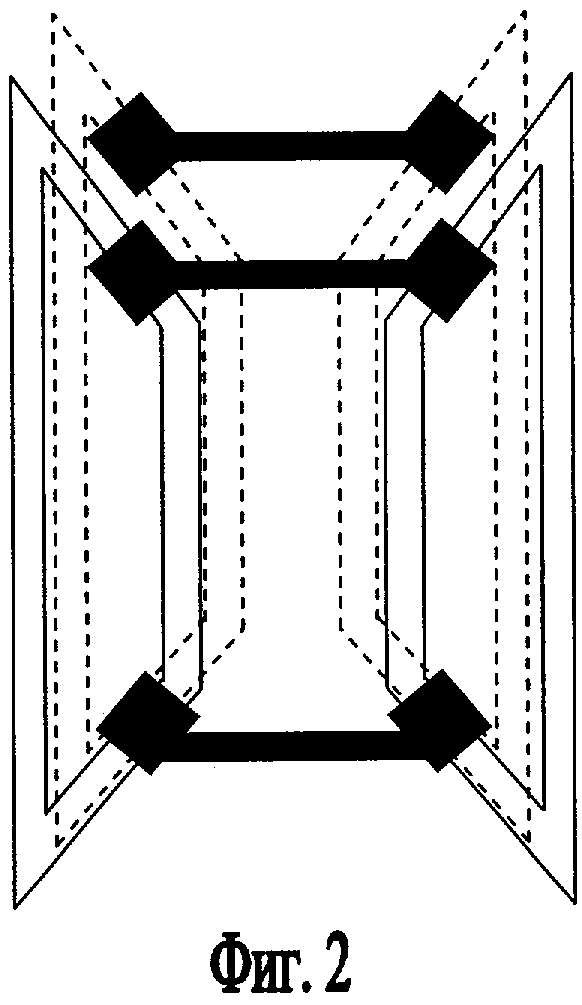
На фиг.1 показана конструкция пьезопривода.
На фиг.2 представлена принципиальная кинематическая схема стержневой конструкции.
Пьезопривод содержит пьезоэлектрический элемент 1, с помощью которого осуществляются перемещения, стержневую конструкцию 2, перемещаемое рабочее звено 3, пьезоэлектрический элемент 4, установленный на перемещаемом рабочем звене, который компенсирует погрешности перемещений, связанные с люфтами в месте подвижных контактов, опору 5.
Устройство работает следующим образом.
При подаче на пьезоэлектрический элемент, находящийся между трапецеидальными элементами стержневой конструкции 2, управляющего напряжения он изменяет свои линейные размеры. При этом трапецеидальные элементы стержневой конструкции 2 начинают либо сближаться, либо отдаляться друг от друга в зависимости от полярности поданного на пьезоэлектрический элемент 1 управляющего напряжения. Вследствие этого, рабочее перемещаемое звено 3 движется по боковым сторонам трапеций вверх или вниз относительно Т-образной опоры соответственно.
Заявляемая конструкция пьезопривода обеспечивает повышение точности перемещений за счет компенсации погрешностей пьезоэлектрическим элементом 4 и расширение диапазона относительных перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2603353C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
| ЛИНЕЙНЫЙ ПРИВОД | 2007 |
|
RU2373611C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И/ИЛИ КОНТРОЛЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ФИЗИЧЕСКОГО ПАРАМЕТРА СРЕДЫ (ВАРИАНТЫ) | 2003 |
|
RU2310818C2 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
Изобретение относится к области электромеханики и может быть использовано для привода различных устройств в прецизионном приборостроении, при медико-биологических исследованиях и в системах нано-технологии. Технический результат: расширение диапазона перемещений, повышение точности. Сущность: пьезопривод содержит Т-образное рабочее перемещаемое звено, линейные пьезоэлектрические элементы, Т-образную опору. Перемещаемое звено и опора расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу. Стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент. Боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена. На перемещаемом рабочем звене установлен второй пьезоэлектрический элемент. 2 ил.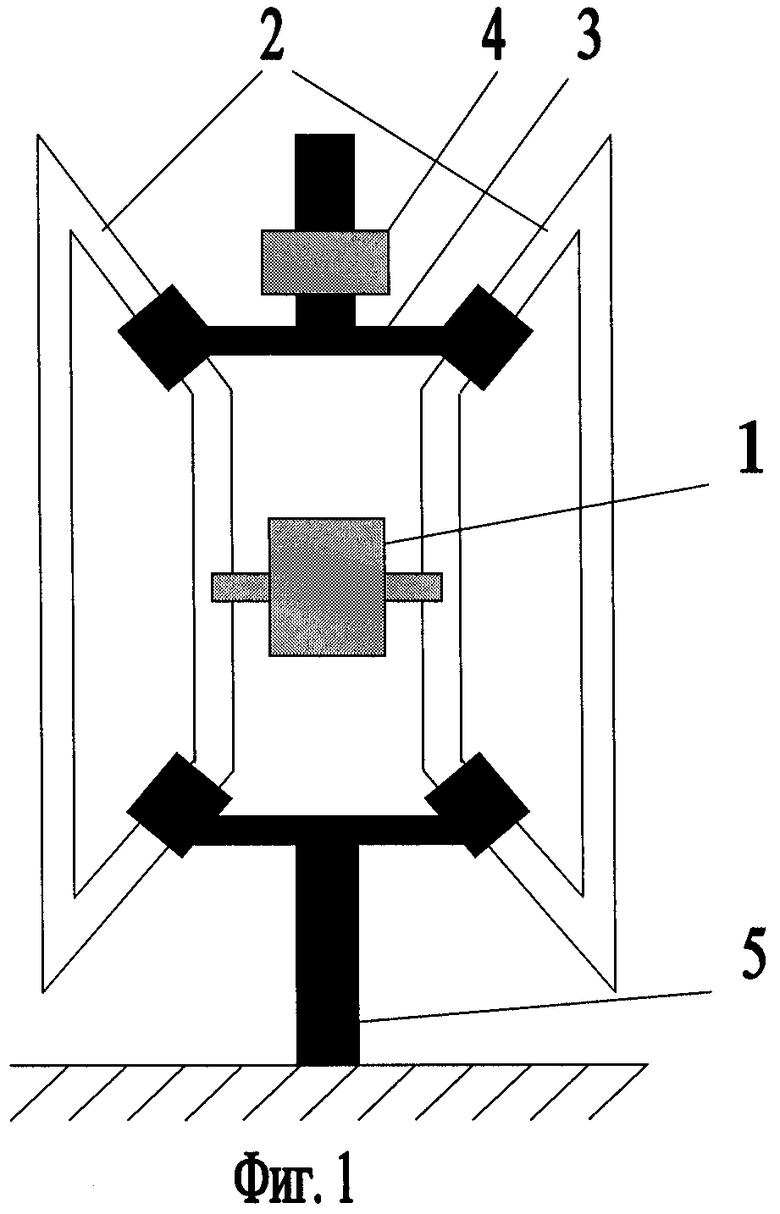
Пьезопривод, содержащий рабочее перемещаемое звено, симметричную стержневую конструкцию, линейные пьезоэлектрические элементы, отличающийся тем, что он снабжен Т-образной опорой и рабочее перемещаемое звено выполнено также Т-образным, причем они расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу, кроме того, стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент, при этом на перемещаемом рабочем звене также установлен пьезоэлектрический элемент, боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена соответственно.
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| Пьезоэлектрический преобразователь микроперемещений | 1989 |
|
SU1657953A1 |
| US 6715731 A, 06.04.2004 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

