Изобретение относится к области электромеханики и пьезотехники и может быть использовано в качестве исполнительного механизма управляющих систем прецизионного приборостроения, в оптических системах, в системах нанотехнологий.
Известен пьезоэлектрический двигатель [1]. Он состоит из пьезопакета (пьезоэлектрического пакета) с осевым отверстием, с которым сопряжены опорные элементы со сферическими внешними поверхностями. Один опорный элемент связан с упругим корпусом, а второй опорный элемент - с винтом, обеспечивающим зажатие пьезопакета между двумя опорными элементами. Когда на пьезопакет подается управляющее напряжение, он удлиняется по оси и сжимается по диаметру. Уменьшение диаметра отверстия в пьезопакете приводит при этом к выжиманию опорных элементов из отверстия благодаря сферической форме их поверхностей. При изменении знака управляющего напряжения пьезопакет уменьшается в длину и расширяется по диаметру. Увеличение при этом диаметра отверстия приводит к тому, что опорные элементы входят в него под действием упругого корпуса. Недостатками устройства являются малый рабочий ход, а также повышенный износ трущихся поверхностей, соответственно снижение точности позиционирования и уменьшение нагрузочного усилия из-за трения между опорными элементами со сферическими внешними поверхностями и пьезопакетом.
Известен линейный привод [2]. Он состоит из установленных внутри корпуса трех активных секций, выполненных в виде пьезоэлементов, взаимодействующих со штоком привода. При этом активные секции выполнены коаксиальными. Смежные активные секции соответственно сопряжены между собой через днища и торцевые буртики стаканов. Шток привода жестко соединен с днищем стакана и установлен в корпусе с возможностью осевого перемещения. При этом шток привода может быть подпружинен относительно корпуса возвратной пружиной. При увеличении длины трех активных секций движение через три стакана передается штоку привода. При этом днище внешнего стакана выдвигается до упора с корпусом, а рабочий ход штока привода равен сумме рабочих ходов трех активных секций. При уменьшении длины активных секций возвратное движение штока привода и трех стаканов происходит под действием силы тяжести или упругих свойств перемещаемого объекта. При этом днища стаканов опускаются до упора друг с другом, а их буртики - до упора с корпусом. Рабочий ход штока привода также равен сумме рабочих ходов активных секций. В случае отсутствия обратного воздействия объекта на шток привода, последний, при необходимости, может быть подпружинен относительно корпуса возвратной пружиной. Недостатком линейного пьезопривода является то, что увеличение рабочего хода достигается за счет кратного увеличения пьезоэлементов, а следовательно, массогабаритных показателей. Вторым недостатком устройства является необходимость выбора зазоров в соединениях, что усложняет его сборку.
Известно позиционирующее устройство [3], выполненное в виде монолитной симметричной Н-образной стержневой конструкции, состоящей из стержней с упругими цилиндрическими шарнирами на концах и в середине стержней. Боковые стержни ортогональны центральному стержню и жестко соединены с корпусом устройства через линейные пьезоэлектрические элементы. В середине центрального стержня закреплено звено, несущее рабочий орган. Недостатками устройства являются большие габариты и малые, совершаемые устройством относительные перемещения, невысокая точность.
Наиболее близким по технической сущности к предлагаемому решению является пьезопривод [4] (прототип), содержащий Т-образные опоры и рабочее перемещаемое звено, расположенные таким образом, что их горизонтальные элементы обращены навстречу друг другу, а симметричная стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через линейный пьезоэлектрический элемент, при этом на перемещаемом рабочем звене также установлен линейный пьезоэлектрический элемент, боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена соответственно.
Недостатком прототипа является увеличение износа пьезопривода из-за действия силы трения при перемещении стержневой конструкции относительно кольцевых держателей Т-образной опоры и Т-образного рабочего перемещаемого звена, а соответственно, появление люфтов, ухудшение линейности и точности позиционирования. Вторым недостатком прототипа является небольшое нагрузочное усилие пьезопривода, т.к. часть силы пьезоэлектрического элемента идет на горизонтальную составляющую ее вектора и на преодоление силы трения при перемещении стержневой конструкции относительно кольцевых держателей. Также недостатком прототипа является сложность его сборки для обеспечения безлюфтового соединения стержневой конструкции в кольцевых держателях.
Задачей предлагаемого изобретения является повышение линейности, точности позиционирования, увеличение нагрузочного усилия, повышение надежности и технологичности изготовления, уменьшение габаритных размеров.
Объектом изобретения является усиливающий пьезоэлектрический актюатор, содержащий перемещаемое звено, выполненное в виде упругой металлической рамки, четыре пьезоэлектрических пакета (пьезопакета), образованных линейными пьезоэлектрическими элементами (пьезоэлементами), которые установлены параллельно друг другу на неподвижном основании в форме плиты с тремя вертикальными упорами и ориентированы в одном направлении поляризации. Электрически пьезопакеты соединены параллельно. При этом четыре пьезопакета прижаты к вертикальным упорам на основании двумя жесткими сторонами рамки так, что первый и четвертый пьезопакеты расположены между одной жесткой стороной рамки и первым и третьим вертикальным упорами соответственно, а второй и третий пьезопакеты расположены между второй жесткой стороной рамки и вторым вертикальным упором.
Техническим результатом изобретения является повышение линейности, точности позиционирования, увеличение нагрузочного усилия, повышение надежности и технологичности изготовления за счет выполнения перемещаемого звена в виде рамки с вырезами, внутри которой расположено основание в форме плиты с тремя вертикальными упорами, а четыре пьезоэлектрических пакета поджаты между элементами рамки и тремя упорами.
Это достигается тем, что в усиливающем пьезоэлектрическом актюаторе, содержащем рабочее перемещаемое звено, линейные пьезоэлектрические элементы, согласно предлагаемому изобретению перемещаемое звено выполнено в виде рамки с двумя параллельными противоположными жесткими сторонами и двумя выпуклыми упругими сторонами с жесткими центрами, в которой сделаны вырезы, образующие изгибные элементы, причем изгибные элементы образованы на границах жестких и упругих сторон рамки с внутренней и внешней ее стороны, а также по краям жестких центров с внешней стороны рамки, при этом четыре пьезоэлектрических пакета из линейных пьезоэлектрических элементов установлены на неподвижном основании в форме плиты с тремя вертикальными упорами, причем установлены так, что все четыре пьезоэлектрических пакета параллельны друг другу и ориентированы в одном направлении поляризации, электрически соединены параллельно, первый и четвертый пьезоэлектрические пакеты поджаты между первым и третьим вертикальными упорами и первой жесткой стороной рамки, второй и третий пьезоэлектрические пакеты поджаты между вторым вертикальным упором и второй жесткой стороной рамки.
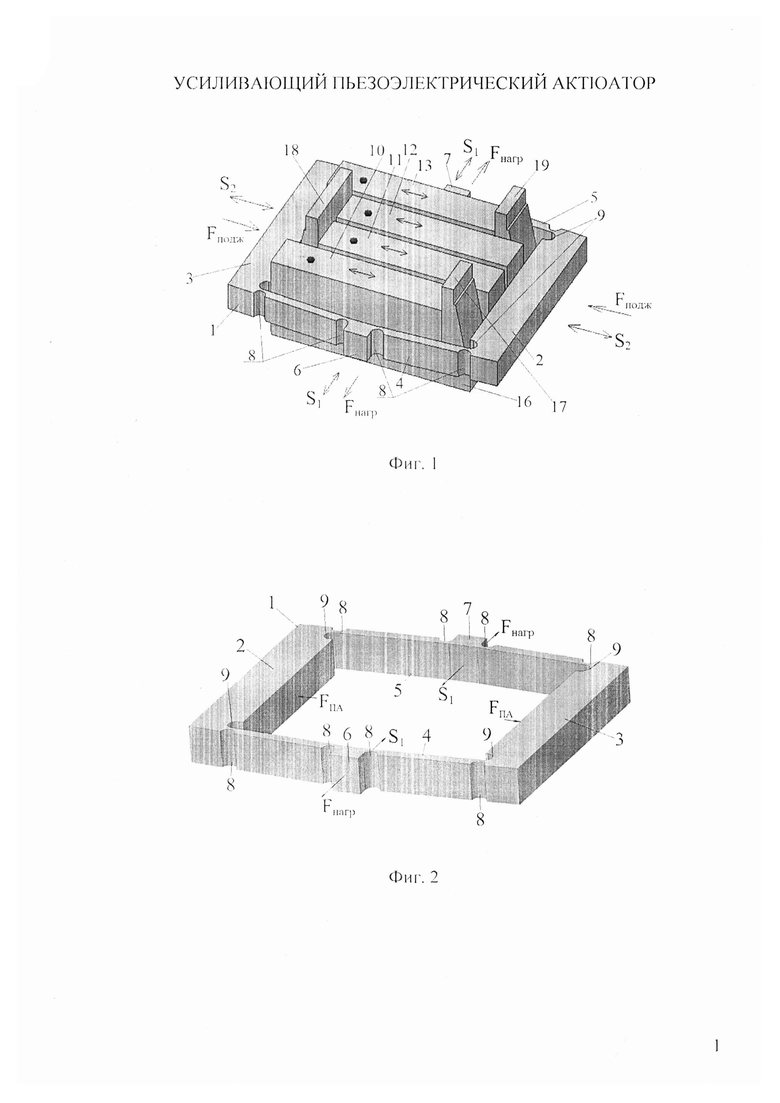
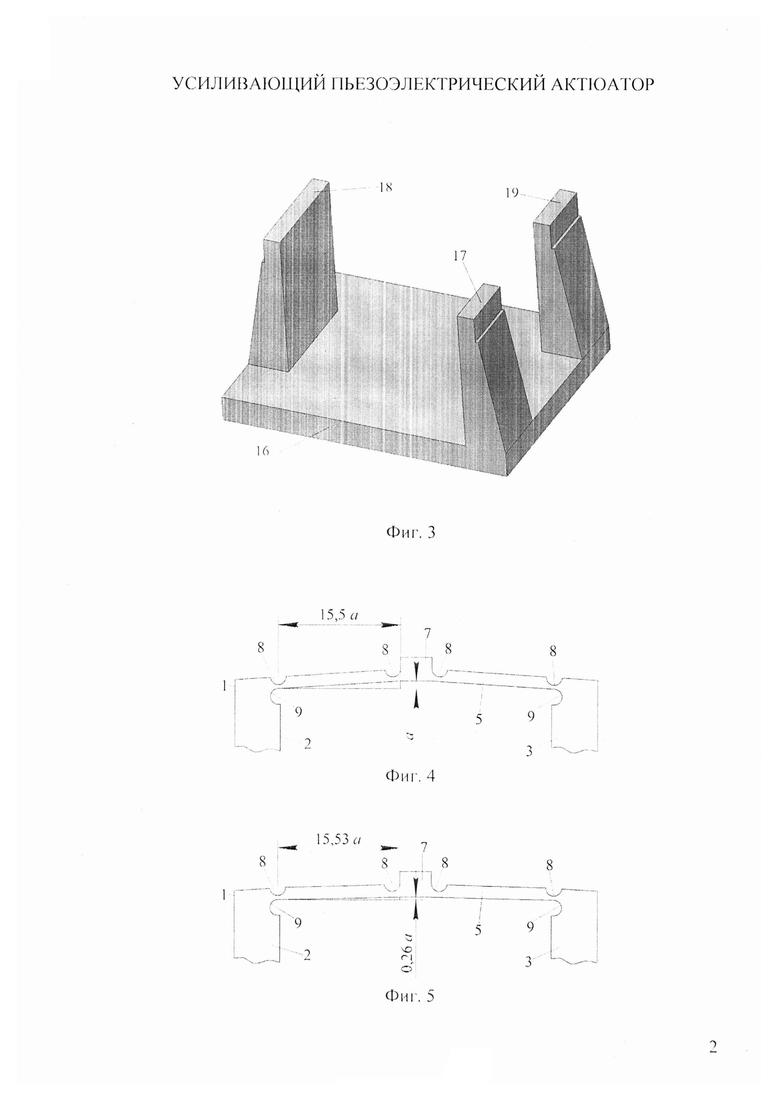
На фиг. 1 показана 3D-модель усиливающего пьезоэлектрического актюатора в сборе (без верхней крышки), а на фиг. 2 и 3 его основные конструктивные элементы. Усиливающий пьезоэлектрический актюатор содержит рабочее перемещаемое звено 1, выполненное в виде рамки с двумя параллельными противоположными жесткими сторонами 2, 3 и двумя выпуклыми упругими сторонами 4, 5 с жесткими центрами 6, 7 (см. фиг. 2). В рамке сделаны восемь внешних вырезов 8 и четыре внутренних выреза 9, благодаря которым в перемещаемом звене-рамке 1 образованы изгибные элементы. Эти изгибные элементы образованы на границах жестких 2, 3 и упругих 4, 5 сторон рамки с внутренней и внешней ее стороны, а также по краям жестких центров 6 и 7 с внешней стороны рамки 1 (перемещаемого звена). При этом четыре пьезоэлектрических пакета 10-13 (см. фиг. 1) из линейных пьезоэлектрических элементов установлены на неподвижном основании 16 (см. фиг. 3) в форме плиты с тремя вертикальными упорами 17-19. Все четыре пьезоэлектрических пакета 10-13 (фиг. 1) установлены параллельно друг другу и ориентированы в одном направлении поляризации. Пьезоэлектрические элементы пьезоэлектрических пакетов 10-13 электрически соединены параллельно. Первый 10 пьезоэлектрический пакет поджат между первым 17 вертикальным упором и жесткой стороной рамки 3, второй 11 пьезоэлектрический пакет поджат между вторым вертикальным упором 18 и жесткой стороной рамки 2, третий 12 пьезоэлектрический пакет поджат между жесткой стороной рамки 2 и вторым вертикальным упором 18, а четвертый 13 пьезоэлектрический пакет поджат между третьим 19 вертикальным упором и жесткой стороной рамки 3.
Устройство работает следующим образом. При подаче на электроды пьезоэлектрических пакетов 10-13 управляющего электрического напряжения (от 0 до +120 B) они увеличивают свой линейный размер (удлиняются) в направлении S2 (фиг. 1) пропорционально приложенному электрическому напряжению, создают усилие FПА (фиг. 2), воздействующее на две жесткие стороны 2, 3 рамки 1, и сжимают ее в направлении S1 (фиг. 1, фиг.2), перпендикулярном направлению удлинения (расширения) пьезоэлектрических пакетов. В результате этого происходит перемещение рабочих поверхностей жестких центров 6, 7, пропорциональное приложенному управляющему электрическому напряжению.
Благодаря тому, что две пары пьезоэлектрических пакетов (10, 13 и 11, 12) механически соединены последовательно (см. фиг. 1), а в парах пьезоэлектрические пакеты 10 и 13, 11 и 12 механически соединены параллельно, перемещение S1 рабочей поверхности жестких центров увеличено в 2 раза по сравнению с прототипом, а также в четыре раза увеличена сила Fнагр (нагрузочное усилие), действующая на объект управления (фиг. 1, фиг. 2). Это достигается без увеличения длины пьезоэлектрического актюатора.
Кроме того, за счет эффекта рычага в предлагаемой конструкции дополнительно увеличено перемещение рабочей поверхности жестких центров 6 и 7. К примеру, если выпуклая упругая сторона 5 с жестким центрами 7 выгнута по середине на величину а (см. фиг. 4), а расстояние между границей жесткого центра 7 и центром выреза 8 равно 15,5а, то при его увеличении до 15,53а (изменение длины на 0,2%) величина а изменится до 0,26а (изменение на 74%), как показано на фиг. 5, т.е. в соотношении 25:1 (0,74а:0,03а). В результате существенно увеличено перемещение рабочей поверхности жестких центров 6 и 7.
Преимуществом предложенной конструкции усиливающего пьезоэлектрического актюатора является повышение точности позиционирования за счет обеспечения предварительного поджатия всех четырех пьезоэлектрических пакетов 10-13, соединенных определенным образом одной и той же рамкой 1, что равномерно уменьшает зазоры между соединяемыми поверхностями основных конструктивных элементов актюатора (рамки 1, основания 16 с вертикальными упорами 17-19 и пьезоэлектрических пакетов 10-13). Кроме того, это обеспечивает устойчивую работу пьезоэлектрического актюатора в динамическом режиме. Усилие предварительного поджатия Fподж (фиг. 1) может быть задано с помощью винтов (на фигурах не показаны), вкручиваемых в отверстия, выполненные в жестких сторонах 2, 3, и упирающихся в торцы пьезоэлектрических пакетов 11, 12 и 10, 13.
Наличие предварительного поджатая и отсутствие люфтовых соединений в элементах конструкции усиливающего пьезоэлектрического актюатора повышает линейность преобразования электрического сигнала в перемещение рабочих поверхностей жестких центров 6 и 7.
Так как отсутствуют люфтовые соединения в предлагаемой конструкции, по сравнению с прототипом, уменьшается износ подвижных элементов пьезоэлектрического актюатора, в связи с чем повышается его надежность. Конструкция нового усиливающего пьезоэлектрического актюатора является более технологичной, так как нет необходимости в точной сборке и настройке люфтовых соединений.
Таким образом, благодаря отличительным признакам изобретения повышается линейность, точность позиционирования, нагрузочное усилие, надежность и технологичность изготовления, улучшаются габаритные показатели устройства.
Предлагаемое устройство выгодно отличается от известных ранее и может найти широкое применение в качестве исполнительного механизма управляющих систем прецизионного приборостроения, в оптических системах, в системах нанотехнологий.
Источники информации
1. Бойков В.И., Быстров С.В., Смирнов А.В., Чежин М.С. Патент РФ №2030087. Пьезоэлектрический двигатель. Опубл. 27.02.1995.
2. Саяпин С.Н., Синев А.В. Патент РФ №2373611. Линейный привод. Опубл. 20.11.2009.
3. Дукаревич Ю.Е., Таганов И.Н. Патент РФ №2080631. Позиционирующее устройство. Опубл. 27.05.1997.
4. Долганев Ю.Г., Шашкин В.В., Мишин Н.Н., Петров В.В., Мамаев В.Ю. Патент РФ №2281598. Пьезопривод. Опубл. 10.08.2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ БИМОРФ ИЗГИБНОГО ТИПА | 2022 |
|
RU2793564C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2803015C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2839714C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2818079C1 |
Изобретение относится к электротехнике и может быть использовано в качестве исполнительного механизма управляющих систем прецизионного приборостроения, в оптических системах и др. Технический результат состоит в повышении линейности, точности позиционирования, нагрузочного усилия, надежности и технологичности изготовления. Усиливающий пьезоэлектрический актюатор содержит линейные пьезоэлектрические элементы, перемещаемое звено, выполненное в виде рамки с двумя параллельными противоположными жесткими сторонами и двумя выпуклыми упругими сторонами с жесткими центрами. В рамке выполнены вырезы, образующие изгибные элементы на границах жестких и упругих сторон рамки с внутренней и внешней ее стороны, а также по краям жестких центров с внешней стороны рамки. Четыре пьезоэлектрических пакета из линейных пьезоэлектрических элементов установлены параллельно друг другу на неподвижном основании в форме плиты с тремя вертикальными упорами, ориентированы в одном направлении поляризации и электрически соединены параллельно. Первый и четвертый пьезоэлектрические пакеты поджаты между первым и третьим вертикальными упорами и первой жесткой стороной рамки, а второй и третий - между вторым вертикальным упором и второй жесткой стороной рамки. 5 ил.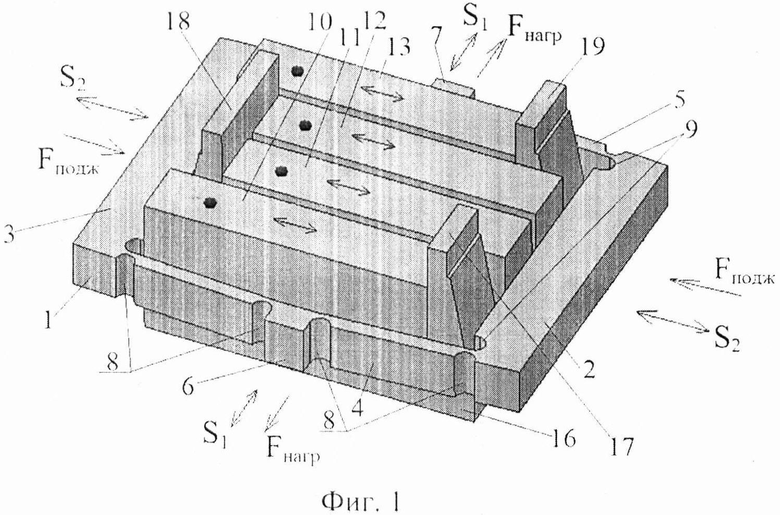
Усиливающий пьезоэлектрический актюатор, содержащий рабочее перемещаемое звено, линейные пьезоэлектрические элементы, отличающийся тем, что перемещаемое звено выполнено в виде рамки с двумя параллельными противоположными жесткими сторонами и двумя выпуклыми упругими сторонами с жесткими центрами, в которой сделаны вырезы, образующие изгибные элементы, причем изгибные элементы образованы на границах жестких и упругих сторон рамки с внутренней и внешней ее стороны, а также по краям жестких центров с внешней стороны рамки, при этом четыре пьезоэлектрических пакета из линейных пьезоэлектрических элементов установлены на неподвижном основании в форме плиты с тремя вертикальными упорами, причем установлены так, что все четыре пьезоэлектрических пакета параллельны друг другу и ориентированы в одном направлении поляризации, электрически соединены параллельно, первый и четвертый пьезоэлектрические пакеты поджаты между первым и третьим вертикальными упорами и первой жесткой стороной рамки, второй и третий пьезоэлектрические пакеты поджаты между вторым вертикальным упором и второй жесткой стороной рамки.
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2009 |
|
RU2390090C1 |
| ПЬЕЗОПРИВОД | 2004 |
|
RU2281598C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| US 6979934 B1, 27.12.2005 | |||
| US 2012031209 A1, 09.02.2012. | |||

