Изобретение относится к области электромеханики и может быть использовано в системах точного позиционирования, для линейного перемещения различных объектов и устройств в нанотехнологическом оборудовании и прецизионном приборостроении.
Известно устройство перемещения, содержащее основание, каретку, движитель, выполненный из двух пластин, соединенных между собой упругими шарнирами, причем к одной из пластин прикреплена перемещаемая каретка, а другая пластина прижата к основанию и фрикционно взаимодействует с ним, между пластинами расположен пьезоэлемент, соединенный одним концом с краем одной пластины, а другим - с противоположным краем другой пластины (см. патент РФ на ПМ №87572, кл. МПК H01L 41/00, публ. 10.10.2009 г.).
Недостатком данного устройства является использование прижатой к основанию пластины для увеличения опорной базы конструкции. Так как длина пластины должна превышать длину используемого в устройстве пьезоэлемента и при этом пластина должна обладать достаточной жесткостью, то ее масса, которую по указанным выше причинам нельзя выбрать пренебрежимо малой, может существенно понизить рабочие частоты устройства. Другим недостатком данного устройства является паразитное смещение каретки относительно основания, вызванное нагреванием пьезоэлемента в процессе работы.
Известно пьезоэлектрическое устройство, содержащее две группы стержневых пьезопреобразователей, консольно закрепленных в корпусе параллельно оси подвижного элемента в виде выходного вала. Каждая группа включает три пьезопреобразователя, равномерно расположенных по окружности. Между их свободными концами, снабженными фрикционными опорными элементами, с натягом установлен выходной вал, причем пьезопреобразователи двух групп своими свободными концами обращены навстречу друг другу. Для осуществления перемещения выходного вала электрическое напряжение поочередно подают на пьезопреобразователи одной, а затем второй группы, перемещая концы пьезопреобразователей относительно выходного вала в одном направлении. Затем электрическое напряжение со всех пьезопреобразователей обеих групп одновременно снимают.В результате выходной вал перемещается на один шаг (см. патент RU 2045128, МПК 6 H02N 2/02, Н01 41/09, публ. 27.09.1995. - прототип).
Недостатком данного устройства является его медлительность, обусловленная поочередностью деформаций пьезопреобразователей (перемещение на один шаг состоит из 7 отдельных последовательных процедур), к тому же обращение свободных концов пьезопреобразователей навстречу друг другу уменьшает опорную базу устройства.
Целью предлагаемого технического решения является увеличение опорной базы предлагаемого устройства при уменьшении его габаритных размеров, увеличение рабочей частоты, компенсация паразитных тепловых уходов, вызванных нагреванием встроенных в устройство пьезоэлементов.
Указанная цель достигается тем, что в известном техническом решении для перемещений (пьезоустройство пошагового перемещения), включающем каретку, основание, группу пьезоэлементов, каждый из которых одним своим концом прикреплен к каретке, а другим - к прижатой к основанию опоре, согласно изобретению, количество пьезоэлементов в группе не менее двух и они разделены на две подгруппы так, что концы с прикрепленными опорами у первой подгруппы пьезоэлементов и концы с прикрепленными опорами у второй подгруппы пьезоэлементов направлены в противоположные друг от друга стороны, причем пилообразное напряжение, подаваемое на пьезоэлементы первой подгруппы, противофазно напряжению, подаваемому на пьезоэлементы второй подгруппы.
Кроме того, каретка прикреплена к опорам посредством упругих элементов.
Кроме того, упругие элементы, соединяющие опоры с кареткой, выполнены в виде плоских пружин или упругих шарниров.
Принципиальные схемы вариантов предлагаемого устройства приведены на фиг.1-4, где:
1 - каретка;
2 - первый пьезоэлемент;
3 - второй пьезоэлемент;
4 - первая опора;
5 - вторая опора;
6 - основание;
7 - плоские пружины;
8 - магнит;
9 - упругие шарниры;
10 - выступы;
11 - третий пьезоэлемент;
12 - четвертый пьезоэлемент;
13 - третья опора;
14 - четвертая опора.
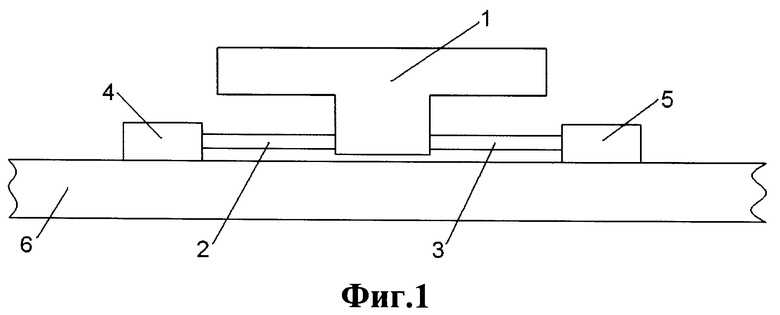
На фиг.1 представлена конструкция устройства, состоящего из каретки 1, к которой одними из своих концов прикреплены пьезоэлементы 2 и 3, другие концы которых прикреплены к опорам 4 и 5 соответственно. Опоры 4 и 5 прижаты к основанию 6 (прижимные элементы не показаны) и имеют с ней фрикционный контакт.
Устройство работает следующим образом.
На пьезоэлементы 2 и 3 противофазно подается пилообразное напряжение. Во время медленной фазы пилы пьезоэлемент 2, например, медленно сжимается, а пьезоэлемент 3 медленно расширяется, при этом действующие со стороны пьезоэлементов 2 и 3 силы на опоры 4 и 5 соответственно будут меньше сил трения покоя между основанием 6 и опорами 4 и 5, поэтому опоры 4 и 5 останутся неподвижными относительно основания 6, а каретка 1 сместится влево на величину деформации пьезоэлементов 2 и 3. Во время быстрой фазы пилы пьезоэлементы 2 и 3 резко возвращаются в свои исходные состояния, при этом на опоры 4 и 5 со стороны пьезоэлементов 2 и 3 соответственно действуют силы, превышающие силы трения покоя между ними и основанием 6, в результате чего опоры 4 и 5 смещаются влево, а каретка 1, благодаря своей инерции, практически остается неподвижной.
При следующем пилообразном импульсе процесс перемещения каретки 1 повторится, и она переместится влево еще на один шаг.
Для перемещения каретки 1 вправо необходимо либо поменять порядок следования медленной и быстрой фаз у подаваемого пилообразного напряжения, либо поменять его полярность.
Частота следования шагов регулируется от единичных шагов, до сравнимой с собственными частотами пьезоэлементов 2 и 3, т.к. массы опор 4 и 5 можно выбрать меньшими, чем массы самих пьезоэлементов 2 и 3.
Вследствие того, что концы пьезоэлементов 2 и 3 с прикрепленными к ним опорами 4 и 5 соответственно направлены в противоположные стороны друг от друга, устойчивость всей конструкции за счет увеличения опорной базы возрастает, а нагревание пьезоэлементов 2 и 3 при работе устройства на высоких частотах не приводит к паразитному смещению каретки 1 относительно основания 6.
На фиг.2 представлен вариант устройства, в котором каретка 1 прикреплена к опорам 4 и 5 посредством упругих элементов, выполненных в виде плоских пружин 7. В этом варианте прижим опор 4 и 5 к основанию 6 осуществлен с помощь расположенного на каретке 1 магнита 8, при этом основание 6 или его часть выполнено из обладающего магнитными свойствами материала.
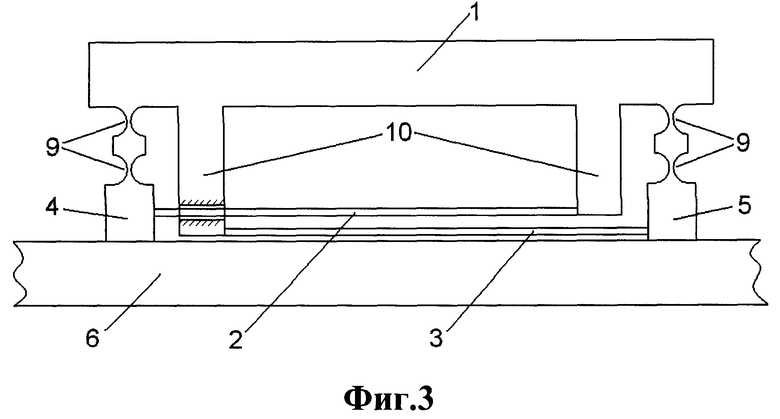
На фиг.3 представлен вариант устройства, в котором каретка 1 прикреплена к опорам 4 и 5 посредством упругих шарниров 9, а пьезоэлементы 2 и 3 расположены друг над другом и прикреплены к выступам 10 каретки 1, причем пьезоэлемент 2 проходит через отверстие в выступе 10.
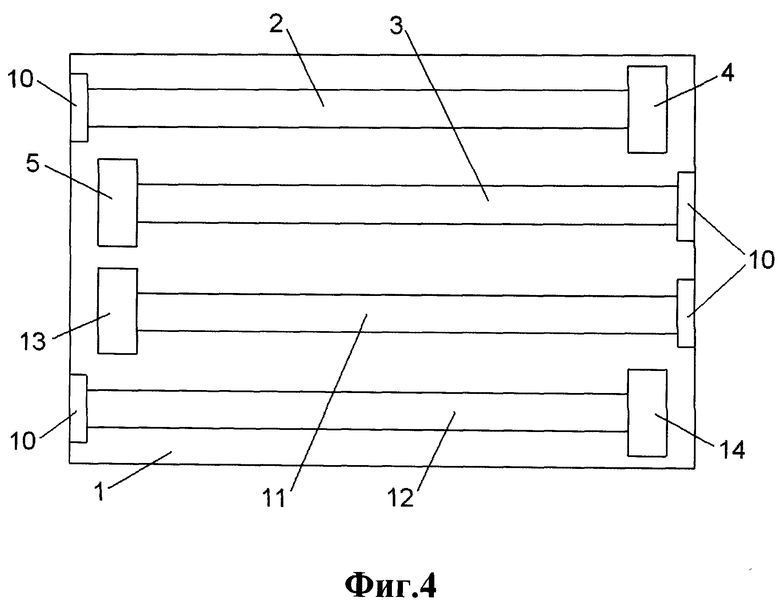
Количество пьезоэлементов в предлагаемом пьезоустройстве пошагового перемещения, в зависимости от требований к нему по тяге и устойчивости (опорной базе), может быть и более двух.
На фиг.4 представлен вариант устройства, в котором наряду с пьезоэлементами 2 и 3 к выступам 10 каретки 1 прикреплены пьезоэлементы 11 и 12 с опорами 13 и 14 соответственно (на рисунке показан вид на каретку 1 со стороны основания 6), при этом на пьезоэлементы 2 и 12 подается синфазное напряжение, противофазное напряжению, подаваемому на пьезоэлементы 3 и 11.
Так как на пьезоэлементы при работе устройства подается противофазное напряжение (разной полярности), то его величина не должна превышать значений, приводящих к деполяризации пьезоэлементов.
Диапазон перемещения приведенных вариантов устройств ограничивается только линейными размерами основания.
Таким образом, использование предлагаемого изобретения позволит увеличить опорную базу устройств перемещения, сделав их линейные размеры сравнимыми с длиной используемых в них пьезоэлементов, что важно при изготовлении миниатюрных шаговых позиционеров, а так же позволит повысить рабочие частоты устройства и избежать при этом паразитного смещения каретки, обусловленного тепловым расширением пьезоэлементов вследствие их нагревания при работе в беззвучном режиме на высоких частотах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С СОСТАВНОЙ ОПОРОЙ | 2016 |
|
RU2635341C2 |
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
Изобретение относится к области электромеханики и может быть использовано в системах точного позиционирования, для линейного перемещения различных объектов и устройств в нанотехнологическом оборудовании и прецизионном приборостроении. Техническим результатом является увеличение опорной базы устройства перемещения при уменьшении его габаритных размеров, увеличение рабочей частоты, компенсация паразитных тепловых уходов, вызванных нагреванием встроенных в устройство пьезоэлементов. Сущность изобретения: в пьезоустройстве пошагового перемещения, включающем группу из не менее двух пьезоэлементов, каждый из которых одним своим концом прикреплен к перемещаемой по основанию каретке, а другим - к прижатой к основанию опоре, все пьезоэлементы разделены на две подгруппы так, что концы с прикрепленными опорами у первой подгруппы пьезоэлементов и концы с прикрепленными опорами у второй подгруппы пьезоэлементов направлены в противоположные друг от друга стороны, причем пилообразное напряжение, подаваемое на пьезоэлементы первой подгруппы, противофазно напряжению, подаваемому на пьезоэлементы второй подгруппы. Кроме того, каретка прикреплена к опорам посредством упругих элементов. Кроме того, упругие элементы, соединяющие опоры с кареткой, выполнены в виде плоских пружин или упругих шарниров. 2 з.п. ф-лы, 4 ил.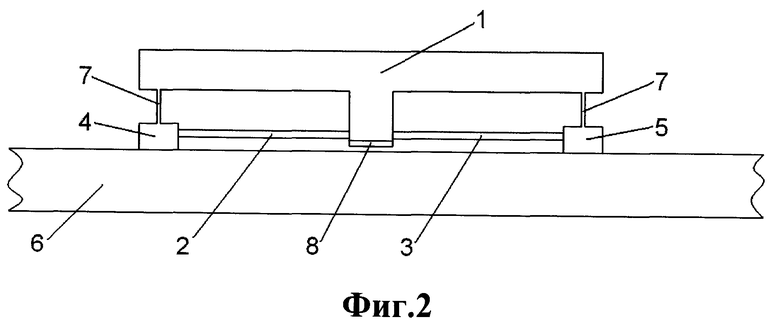
1. Пьезоустройство пошагового перемещения, содержащее каретку, основание, группу пьезоэлементов, каждый из которых одним своим концом прикреплен к каретке, а другим - к прижатой к основанию опоре, отличающееся тем, что количество пьезоэлементов в группе не менее двух и они разделены на две подгруппы так, что концы с прикрепленными опорами у первой подгруппы пьезоэлементов и концы с прикрепленными опорами у второй подгруппы пьезоэлементов направлены в противоположные друг от друга стороны, причем пилообразное напряжение, подаваемое на пьезоэлементы первой подгруппы, противофазно напряжению, подаваемому на пьезоэлементы второй подгруппы.
2. Пьезоустройство по п.1, отличающееся тем, что каретка прикреплена к опорам посредством упругих элементов.
3. Пьезоустройство по пп.1 и 2, отличающееся тем, что упругие элементы, соединяющие опоры с кареткой, выполнены в виде плоских пружин или упругих шарниров.
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| Механизм для разгрузки на ходу вагонеток маятниковых канатных дорог | 1949 |
|
SU87572A1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| Механизм для разгрузки на ходу вагонеток маятниковых канатных дорог | 1949 |
|
SU87572A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| Плавучая установка для сбора нефти с поверхности воды | 1946 |
|
SU69351A1 |
| US 4422002 A, 20.12.1983 | |||
| US 4798989 A, 17.01.1989 | |||
| US 3952215 A, 20.04.1976 | |||

