Изобретение относится к области электромеханики, а по конструктивно-технологической принадлежности - к микроструктурным устройствам, содержащим гибкие и деформируемые элементы. На базе него могут быть построены электроприводы линейного перемещения в беспрецедентно широкой шкале размеров и тяговых усилий начиная от микромощных прецизионных приводов адаптивной оптики и заканчивая силовыми исполнительными механизмами, сопоставимыми по удельным энергетическим показателям и тяговым характеристикам с гидравлическими и пневматическими агрегатами. Возможно также решение задачи обратного электромеханического преобразования - механической работы при линейном перемещении в электрическую энергию.
В связи с тем, что все выявленные технические средства того же назначения характеризуются совокупностью признаков, коренным образом отличающейся от существенных признаков предмета изобретения, а сходные совокупности существенных признаков присущи техническим средствам другого назначения, изобретение сформулировано как не имеющее прямых аналогов. Приведенная ниже характеристика уровня техники проведена по первой группе выявленных технических средств, т.е. функциональным аналогам, поскольку рассмотрение конструктивных особенностей устройств аналогичного назначения и связанных с ними недостатков (в особенности, ограничений функциональных возможностей) необходимы для раскрытия комплексной технической задачи, решаемой данным изобретением, и характеристики всех технических результатов, получаемых при его осуществлении.
Функциональные и в то же время структурные аналоги, по-видимому, могут быть выявлены в живой природе, поскольку структура и принцип действия предложенного устройства во многом подобны структуре и сократительной активности молекул белка миозина в поперечно-полосатой мускулатуре животных. Разработка таких, на этом основании, биоморфных устройств может, в свою очередь, оказать революционизирующее влияние на дальнейшее развитие робототехники, выражающееся в стирании внешних граней и различий функциональных возможностей между манипуляторами роботов и конечностями живых организмов в шкале размеров и мощностей, начиная от муравья и заканчивая слоном.
Известно, что у традиционных электроприводов, построенных на эффектах электромагнитной индукции и электромагнитного силового взаимодействия при относительном движении проводников с током во внешнем магнитном поле, по мере уменьшения единичной мощности и занимаемого объема эффективность резко падает, а технологические проблемы возрастают в такой степени, что их реализация в микроструктурной шкале размеров элементов (лежащих, главным образом, в интервале от 10-7 до 10-4 м) с целью использования в составе микроэлектромеханических систем (МЭМС) даже серьезно не рассматривается. Здесь на первый план выдвигаются значительно более технологичные при микроминиатюрных размерах электроприводы, построенные на электростатических взаимодействиях, у которых, напротив, эффективность, находящаяся в обратной зависимости от отношения объем/поверхность, по мере миниатюризации возрастает. Конструктивно они представляют собой конденсаторы переменной емкости с подвижной или гибкой обкладкой, такие, например, как гибкое адаптивное зеркало для быстродействующих устройств автофокусировки лазерно-оптических систем [1], зеркальный электрод которого выполнен в виде тонкой металлической (или металлизированной) мембраны с электростатическим приводом.
Характеризовать это устройство как электропривод линейного перемещения можно только с поправкой на то, что его приводимое кинематическое звено и механическая нагрузка представляют собой одно целое и он не предназначен, таким образом, для совершения внешней работы. Кроме того, известно, что потенциальные возможности любых электростатических приводов в энергетическом отношении существенно уступают возможностям электродинамических в силу физических ограничений на плотность связанной с электрическим полем энергии в рабочем зазоре у первых. Эти ограничения определяются электрической прочностью реальных сред, заполняющих рабочий зазор, которая не позволяет довести напряженность поля в нем до величины порядка 3×108 В/м, при которой удельная энергия электрического поля сравняется с типичной для электродинамических взаимодействий величиной удельной энергии в рабочем зазоре, связанной с магнитным полем [2]. С другой стороны, известно, что электростатические приводы вне конкуренции с электродинамическими по своей экономичности, поскольку для отработки статических усилий они не требуют постоянного пропускания тока.
Известно также, что даже, опираясь на электродинамические взаимодействия, современное состояние электромеханики не позволяет строить столь же простые и эффективные силовые электроприводы линейного перемещения, как электроприводы вращения, представленные множеством вариантов самых разнообразных электродвигателей. Доминирующее положение в этой области техники продолжают занимать гидравлические и пневматические агрегаты, несмотря на множество связанных с ними проблем при эксплуатации, поскольку сопоставление их по всему комплексу технических и экономических показателей с электродвигателями, снабженными механическими передачами типа реечной, "винт-гайка" и т.п., чаще оказывается в пользу первых [3].
Наиболее близким в функциональном отношении аналогом является пьезоэлектрический привод, выполненный на базе пьезоэлектрического материала. Главное отличие состоит в том, что пьезоэлектрический материал является типичным веществом, а в данном случае как сам электромеханизм, так и его основная структурная единица подпадают под характеристические признаки объектов-устройств. С другой стороны, очевидно, что переход на уровень микроструктур начинает стирать грани между веществом и устройством, которые окончательно должны исчезнуть на наноструктурном уровне, т.е. при атомной шкале размеров элементов. Поэтому представляется, что между этими группами объектов гораздо больше общего, чем различного, тем более что основную структурную единицу объекта изобретения правомерно рассматривать именно как обладающий аномально высоким пьезоэлектрическим модулем функциональный аналог или микроструктурную физическую модель пьезоэлектрического материала, а содержащий его электромеханизм является не только функциональным, но в определенном смысле и структурным аналогом наиболее типичным образом построенного пьезоэлектрического привода линейного перемещения. В этой связи характерные особенности известных пьезоэлектрических материалов и выполненных на их основе приводов целесообразно рассмотреть более детально.
К пьезоэлектрическим материалам, как известно, относятся анизотропные в электрическом отношении диэлектрики (с естественной электрической анизотропией, присущей монокристаллам, или с искусственной анизотропией, создаваемой у поликристаллических тел путем термообработки в электрическом поле - поляризации), которым свойственны прямой и обратный пьезоэлектрические эффекты, проявляющиеся в изменении электрической индукции под действием механического напряжения и деформации под действием электрического поля. Обратному пьезоэлектрическому эффекту подобен свойственный значительно более широкому классу диэлектриков эффект электрострикции, состоящий в сокращении их размеров под действием электрического поля. Однако по порядку своей величины он значительно слабее первого, поэтому в электроприводах практически не используется.
Основным параметром, определяющим потенциальные возможности приводов, построенных на основе пьезоэлектрических материалов, является их пьезоэлектрический модуль, равный частной производной от деформации по напряженности приложенного электрического поля [4]. Значения этого параметра у реальных материалов таковы, что получение достаточной для практических целей величины линейного перемещения, как правило, требует создания пьезоэлектрических приводов периодической структуры, составленных из множества одинаковых пьезоэлементов, собранных в стянутый в осевом направлении пакет [5].
Функциональные возможности этой относительно дорогой, хрупкой и массивной конструкции таковы, что применение подобных пьезоэлектрических приводов, как правило, не выходит за рамки кинематических приводов точной механики и адаптивной оптики, причем, если подобный привод реализован в составе МЭМС, то он зачастую и является ее наиболее крупным элементом, определяющим массогабаритные показатели системы в целом. Постановка задачи создания на этой основе силовых исполнительных механизмов, сопоставимых по удельным энергетическим показателям с гидравлическими и пневматическими агрегатами, лишена смысла не только по причине отсутствия материалов с достаточно высоким для этой цели пьезоэлектрическим модулем, но и в связи с рассмотренными выше физическими ограничениями плотности энергии, связанной с электрическим полем - первопричиной обратного пьезоэлектрического эффекта. Кроме того, поскольку для построения пьезоэлектрических приводов по своим параметрам в настоящее время подходят только сегнетопьезокерамики - материалы с искусственной поляризацией, заметно подверженные старению, внешним температурным влияниям и обладающие гистерезисом - стабильность параметров пьезоэлектрических приводов и их точность в ряде случаев оказываются недостаточными даже для некоторых наиболее ответственных применений, не требующих высокого уровня энергии.
Главный вывод из рассмотрения пьезоэлектрических материалов и приводов заключается в том, что в технике уже имеются прецедент и положительный опыт решения проблемы электромеханического преобразования в два этапа - первоначально на микроуровне (в данном случае атомно-молекулярном) в универсальной структурной единице (в данном случае веществе-пьезоэлектрике) с последующей индивидуализацией на макроуровне в конечном изделии - электромеханизме. В этом смысле представленное изобретение смыкается с пьезоэлектрическими материалами и приводами, однако решаемая изобретением техническая задача не может быть сведена к простому усовершенствованию таковых и преодолению части присущих им недостатков.
Задача решается в значительно более широкой постановке и состоит в том, чтобы преодолеть вышеуказанные недостатки и ограничения не только этих, но и других известных типов электромеханизмов, включая и такой, как невозможность единым и унифицированным конструктивно-технологическим решением перекрыть шкалу геометрических размеров и уровней энергий электроприводов линейного перемещения, отстоящих на несколько порядков.
Технические результаты, которые могут быть получены при такой постановке задачи, решаемой изобретением, разделяются, таким образом, на столько же групп, скольким типам исполнительных механизмов данное изобретение может дать если не более эффективную, то хотя бы эквивалентную замену. Всех их можно обобщить, констатировав факт получения технических средств, обладающих подобной широтой функциональных возможностей, впервые. Кроме того, известно, что до настоящего времени ни один из исполнительных механизмов, в т.ч. с первичной энергией неэлектрической природы, не может обеспечить приближение к шкале размеров и функциональных возможностей, присущих мускулам живых организмов. С другой стороны, ряд отраслей техники, в первую очередь робототехника, испытывают в такого рода искусственных мускулах острую потребность. Осуществление же данного изобретения, имеющего для этого необходимые и достаточные потенциальные возможности, открывает реальные перспективы их создания и практического применения.
Поставленная задача решается средствами получивших развитие в последние годы микроструктурных технологий, поскольку именно они обеспечивают реальную (а не потенциальную, как на современном уровне развития нанотехнологий) возможность получения искусственной среды с наперед заданными свойствами - соответствующей микроструктуры, подобной по полезным свойствам определенному классу реальных веществ, но свободной от присущих этим веществам вредных (применительно к поставленной задаче) свойств и ограничений, связанным с их химической природой и технологией получения. Естественно, что микроструктура, моделирующая собой некоторое вещество, а не другое устройство, должна допускать возможность, подобно веществу, деления ее, при изготовлении конечного изделия, на части заданной величины, каждая из которых будет обладать всем комплексом полезных свойств, присущих целому. Отсюда следует, что такая микроструктура должна иметь подобно кристаллам периодическое строение, в котором периоду кристаллической решетки, с которым расположены повторяющиеся комбинации атомов в кристалле, соответствует период расположения секций, каждая из которых является минимальным неделимым звеном микроструктуры, сохраняющим все свойства целого.
Главное из этих свойств - изменение размеров под электрическим воздействием, подобно пьезоэлектрическим материалам - назовем пьезоэлектрической активностью с целью различения с пьезоэлектрическим эффектом, присущим только определенным веществам. Из приведенного ранее определения параметр "пьезоэлектрический модуль" сохраняет свой физический смысл и для пьезоэлектрической активности. Поскольку микроструктура представляет собой сборочную единицу, для деталей которой могут быть выбраны материалы с необходимыми свойствами, ее можно выполнить свободной от хрупкости и малой прочности на растяжение, что присуще всем без исключения пьезоэлектрическим материалам - веществам. Поэтому, согласно изобретению, для нее выбрана нитевидная форма, имея в виду, что под нитью в механике понимается кинематическое звено, гибкое по отношению ко всем видам деформаций, кроме растяжения. Очевидно, что замена хрупкого пакета, составленного из множества пьезоэлементов, на гибкую нить с длиной, соответствующей заданному количеству секций, улучшает на несколько порядков массогабаритные показатели электромеханизмов, что существенно для МЭМС. С другой стороны, при создании силовых электроприводов имеется возможность формировать из подобных нитей пучки подобно тому, как в мускулах отдельные волокна собраны в единую мышечную ткань.
В связи с этим, предметом изобретения является электромеханизм микроструктурный нитевидный (ЭМН), устроенный таким образом, что в нем, как основная структурная единица, содержится периодическая микроструктура нитевидная (ПМН) - носитель пьезоэлектрической активности. С другой стороны, ПМН является объектом одного вида и назначения с ЭМН, поскольку совпадает с ним не только по совокупности признаков, общих для всех без исключения исполнений ЭМН, но и по техническим результатам, находящимся в причинно-следственной связи с этими признаками. Выделение ПМН путем присвоения ей специального наименования позволяет, оставаясь в рамках одного независимого пункта формулы, показать, как дополнительный признак, важную в производственно-технологическом аспекте условную грань, отделяющую универсальную основу от специализированного изделия, подобно тому, как это имеет место в функциональных аналогах - пьезоэлектрических приводах, выполненных на основе пьезоэлектрических материалов. Основу ПМН составляют по меньшей мере два одноосно ориентированных взаимно электрически изолированных гибких непрерывных электрода, обладающих электрической проводимостью по меньшей мере в осевом направлении, которые через равные интервалы длины (периодически) перехвачены жестко фиксирующими их взаиморасположение специальными микроструктурными функциональными элементами - интерцепторами (intercept /англ./ - перехватывать, задерживать, отделять...).
Если бы не наличие интерцепторов, признак принадлежности которых к микроструктурам является существенным, не было бы никаких оснований для позиционирования ПМН и соответственно ЭМН среди микроструктур, поскольку геометрические размеры, относящиеся к другим их элементам, легко распознаваемы без использования оптического микроскопа. С другой стороны, понятно, что пропорциональное увеличение этих размеров вместе с сопрягаемыми с ними размерами электродов до сколь угодно больших значений ничего качественно не меняет в физических свойствах данных структур. Однако здесь имеет место ситуация, противоположная той, которая является первопричиной непригодности в МЭМС традиционных для электромеханики устройств (без учета технологических ограничений), физические свойства которых также качественно не меняются при уменьшении размеров их активных частей до сколь угодно малых значений.
Теоретический анализ показывает, что увеличение порядка характеристических размеров элементов ЭМН (в первую очередь, интерцепторов), с выходом за условные пределы микроструктурной шкалы, не менее негативно сказывается на его удельных энергетических показателях, чем уменьшение порядка характеристических размеров, например, обычного электродвигателя, до попадания в микроструктурную шкалу.
ЭМН, таким образом, подобно большинству других структур, где происходит преобразование энергий (в данном случае - электрической в механическую), имеет технически обоснованные пределы линейных геометрических размеров, оказывающих влияние на удельные (по отношению к массе и объему) значения энергетических показателей через соотношение объем/поверхность. Особенностью ЭМН является то, что для него оптимальны минимальные (на практике - ограниченные технологическими возможностями) поперечные размеры. Это, однако, не ограничивает функциональные возможности ЭМН, поскольку любой наперед заданный уровень выходной энергии может быть обеспечен выбором его достаточной суммарной длины, а требуемое соотношение силы и перемещения - тем, как эта длина распределена по отрезкам ПМН, параллельно работающим на общую нагрузку. Технический результат очевиден - существенно более высокая надежность, чем у моноблочных электромеханизмов, и отсутствующая у них устойчивость к частичному повреждению активных частей.
Полная осевая длина интерцепторов выбрана на заданную величину меньшей периода их размещения вдоль оси ПМН, что является необходимым условием сокращения осевой длины последней при работе ЭМН. Поскольку отрезок ПМН, ограниченный двумя интерцепторами, представляет собой секцию, то ясно, что его резервная длина не может быть меньше, чем предельное перемещение, совершаемое в пределах одной секции.
Интерцепторы скреплены с электродами только средней частью своей осевой длины, а по обе стороны от нее симметрично расположены по меньшей мере по два микроструктурных образования (индуктора), выполненных из материала с повышенными, по отношению к окружающей среде, эффективными значениями диэлектрической проницаемости (ε) и/или магнитной проницаемости (μ). Поскольку присущее ПМН свойство пьезоэлектрической активности реализуется через акты электромеханического преобразования, совершаемые в каждой ее секции, на нее правомерно распространить принятую в электромеханике терминологию и именовать активные части структуры, где сконцентрирована энергия действующего силового поля (или полей), и через которые замыкаются соответствующие силовые линии, индукторами. Новым является то, что известные типы электромеханических преобразователей бывают или электродинамического типа, где действует магнитное поле и индуктор выполнен из материала с высоким μ, или электростатического типа, где действует электрическое поле и индуктор выполнен из материала с высоким ε, а здесь впервые представлена микроструктура, являющаяся преобразователем комбинированного (компаундного) типа, эффективно соединяющего возможности первых двух. Такого рода техническое средство также относится к числу впервые полученных.
Техническая задача, решенная благодаря введению индукторов в микроструктуру, содержащую гибкие электроды, состоит в создании анизотропии в электрическом и/или магнитном отношении среды, заполняющей пространство, окружающее электроды. Если бы это пространство было изотропно (при отсутствии индукторов или совпадении их ε и/или μ с соответствующими параметрами окружающей среды), то ПМН сохранила бы пьезоэлектрическую активность, но значение пьезоэлектрического модуля было бы весьма невелико, поскольку все изменение емкости и/или индуктивности электродов, которым определяется величина изгибающей силы - производной от энергии, связанной с электрическим и/или магнитным полем, по направлению изгиба электродов определялось бы только изменением их формы. Если же изгиб электродов происходит в анизотропной среде, то появляется другая, значительно более существенная составляющая изменения их емкости и/или индуктивности, которая связана с перемещением электродов при изгибе в область пространства с повышенными значениями ε, μ. Естественно, что характер анизотропии зависит от конфигурации индукторов и их расположения относительно электродов. Необходимые условия выполняются, когда индукторы выполнены касающимися по меньшей мере половины от общего числа электродов вблизи мест их крепления криволинейными цилиндрическими поверхностями, соответствующими единому заданному профилю клиновидных зазоров между индуктором и касающимися его электродами.
В тех случаях, когда основным требованием к электромеханизму являются максимальная точность позиционирования (как, например, в прецизионных приводах адаптивной оптики), целесообразно по меньшей мере два электрода ПМН выполнять в виде плоского в поперечном сечении монометаллического или биметаллического микропровода, гибкого и прочного, с минимальным значением температурного коэффициента линейного расширения, например из железоникелевого сплава (инвара), или содержащего прочный сердечник, плакированный электропроводной оболочкой. Монометаллические электроды с относительно низкой электропроводностью рекомендуются для электростатических ЭМН (потенциальные электроды), для других же режимов работы целесообразно применение биметаллических (токовых) электродов, в которых сердечник, например, из того же инвара плакирован алюминием, медью или серебром.
Когда точность позиционирования - не главное, но пределы линейного перемещения и/или уровень мощности таковы, что требуется относительно большая суммарная длина ПМН (количество секций измеряется сотнями и тысячами), то целесообразно по меньшей мере два электрода ПМН выполнять в виде плоского в поперечном сечении моноволокна из диэлектрика, гибкого и прочного, с минимальным значением температурного коэффициента линейного расширения, например из ароматического полиамида (арамида), покрытого тонкой, по отношению к толщине волокна, пленкой из металла. Использование более сложных электродов описанной структуры обеспечивает значительно более высокий уровень надежности благодаря их способности к самовосстановлению при электрических пробоях. Механизм самовосстановления аналогичен тому, который имеет место в металлопленочных конденсаторах: металлопокрытие в области пробоя испаряется, а основа сохраняется, и все качественные показатели остаются на приемлемом уровне. Однако очевидно, что если основной режим работы электромеханизма электродинамический, требующий пропускания через электроды сильных токов, то такая структура оказывается неэффективной по причине низкой токонесущей способности тонкой металлической пленки и больших потерь на Джоулево тепло.
В последнем случае целесообразно еще более усложнить структуру электродов, выполнив по меньшей мере два из них в виде плоского в поперечном сечении кабеля, содержащего ряд параллельно уложенных и взаимно электрически изолированных моно- или биметаллических микропроводов, гибких, прочных и обладающих достаточной электропроводностью, например бериллиевых, молибденовых или танталовых, которые скреплены между собой в поперечном направлении и/или расположены на гибкой диэлектрической подложке.
Такая структура электродов позволяет мультиплицировать потокосцепление по отношению к току, пропускаемому через микропровод, за счет их последовательного соединения в кабеле. Что же касается материала этих микропроводов, несущих не только электрическую, но и механическую нагрузку, то очевидно, что обладающие хорошей электропроводностью и относительно недорогие медь и алюминий для этих применений недопустимо мягки и пластичны, а обладающие хорошими механическими свойствами сплавы существенно уступают им по электропроводности. Поэтому целесообразен выбор металлов из вышеприведенного ряда, причем бериллий представляет интерес для электромеханизмов, работающих в условиях низких температур, а тантал - для вариантов таковых с изоляцией на электродах в связи с присущим его пятиокиси высоким значением ε. Электроды в виде плоского кабеля представляют также интерес для ЭМН других режимов работы по причине возможности получения в них требуемого сочетания электрических и механических свойств.
Следующая группа уточнений совокупности существенных признаков изобретения характеризует ПМН в поперечном сечении независимо от того, каким из трех описанных способов реализованы ее электроды. Этих уточнений, по числу преимущественных режимов работы соответствующего ЭМН, три: электростатического (основные силовые взаимодействия по закону Кулона), электродинамического (основные силовые взаимодействия - по закону Ампера) и компаундного, при котором кулоновские и амперовские взаимодействия используются одновременно и независимо (например, первые - для установки исходной позиции, а вторые - для совершения рабочего перемещения). Для первых двух режимов оговаривается преимущественный тип работы, поскольку другие тоже возможны, но менее эффективны. Это связано с тем, что, несмотря на обратимость законов Кулона и Ампера в отношении знака силовых взаимодействий между электродами, несущими электрические потенциалы и параллельные токи (взаимного притяжения или отталкивания), очевидно, что более эффективно использовать взаимное притяжение электродов с противоположными потенциалами и взаимное отталкивание электродов с токами противоположных направлений, иными словами, взаимодействия, которые можно именовать биполярными. В обратных случаях имеют место униполярные взаимодействия, работа на которых, как показывает анализ, тем эффективнее (при прочих равных условиях), чем меньше порядок характеристических размеров элементов ПМН в микроструктурной шкале.
Таким образом, в зависимости от того, притяжение и/или отталкивание электродов соответствуют преимущественному режиму работы ЭМН, необходимо предусмотреть три варианта их укладки в ПМН - свободную, плотную и комбинированную, которые характеризуются так:
- электроды ПМН свободно уложены в один слой вокруг внутренней полости в ее поперечном сечении, а индукторы расположены внутри этой полости с касанием всех электродов;
- электроды ПМН плотно уложены в два слоя в ее поперечном сечении, а индукторы расположены снаружи ПМН с касанием всех электродов;
- плотно уложенные в два слоя электроды ПМН сгруппированы в пары, свободно уложенные, в свою очередь, вокруг внутренней полости в ее поперечном сечении, а индукторы расположены внутри этой полости с касанием половины электродов.
Заключительная группа уточняющих признаков характеризует наиболее важные конструктивные особенности ЭМН, по которым фактически пролегает грань между ним как специализированным изделием и ПМН как универсальным полуфабрикатом. Если все вышеизложенное касалось того, как ПМН, обладающая в латентной форме всеми качествами, делающими ее объектом одного вида и назначения с ЭМН, построена, то ниже характеризуется то, как она адаптирована под конкретные технические требования на ЭМН, в котором соответствующие качества ПМН переведены в явную, причем строго определенную форму. Поскольку, в зависимости от преимущественного режима работы, все ЭМН делятся на три группы, то и соответствующих признаков тоже три.
В частности, ЭМН, предназначенный преимущественно для электростатического режима работы, целесообразно выполнять содержащим по меньшей мере один отрезок ПМН заданной длины с первым из вышеуказанных вариантов укладки электродов в ее поперечном сечении. Этот отрезок (отрезки) закреплен с одной стороны неподвижно, а с другой связан с приводимым кинематическим звеном механической нагрузки. Электроды отрезка (отрезков) ПМН электрически соединены между собой и подключены к источнику электрической энергии по схеме, обеспечивающей подачу на чередующиеся в поперечном сечении электроды противоположных потенциалов и/или пропускание через них токов одного направления.
ЭМН, предназначенный преимущественно для электродинамического режима работы, целесообразно выполнять содержащим по меньшей мере один отрезок ПМН заданной длины с вторым из вышеуказанных вариантов укладки электродов. Механическое закрепление и соединение концов отрезка (отрезков) аналогично предыдущему варианту. Электрическое соединение электродов и подключение к источнику энергии - по другой схеме, а именно обеспечивающей пропускание через электроды разных слоев токов противоположных направлений и/или подачу на них потенциалов одного знака.
ЭМН с наиболее широкими функциональными возможностями, допускающий, в частности, компаундный режим работы, целесообразно выполнять содержащим по меньшей мере два отрезка ПМН заданной длины с третьим из вышеуказанных вариантов укладки электродов. Они должны быть собраны по меньшей мере в один пучок из соприкасающихся своими боковыми поверхностями отрезков, смежные из которых взаимно повернуты вокруг собственной оси на половину углового шага расположения в них пар электродов. Пучок (пучки) с одной стороны закреплен неподвижно, а с другой соединен с приводимым кинематическим звеном механической нагрузки. Электроды пучка (пучков) электрически соединены между собой и подключены к источнику электрической энергии по схеме, обеспечивающей подачу на относящиеся к разным отрезкам электроды, касающиеся общих индукторов, противоположных потенциалов и/или пропускание через них токов одного направления, а через пары плотно уложенных в два слоя электродов, относящихся к одному отрезку и касающихся разных индукторов - пропускание токов противоположных направлений и/или подачу на них потенциалов одного знака.
Сущность изобретения поясняется чертежами.
Фиг.1-9 иллюстрируют примеры конкретного выполнения ПМН, характеризующихся первой группой описанных выше признаков, фиг.10-20 - примеры конкретного выполнения ЭМН, характеризующихся второй группой признаков, а фиг.20-24 поясняют принципы их работы. Линии-выноски позиций не имеют окончаний, если позиция соответствует сборочной единице, оканчиваются точками, если позиция соответствует детали, и стрелками, если позиция указывает на место.
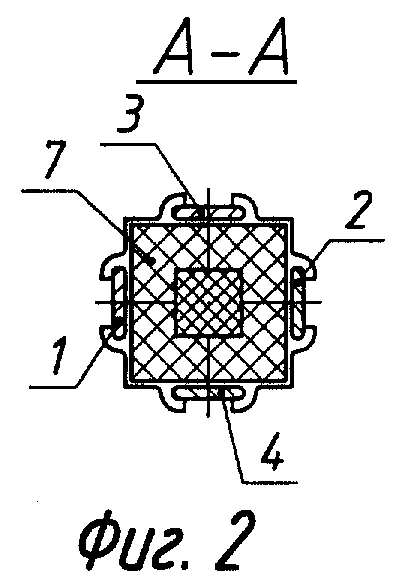
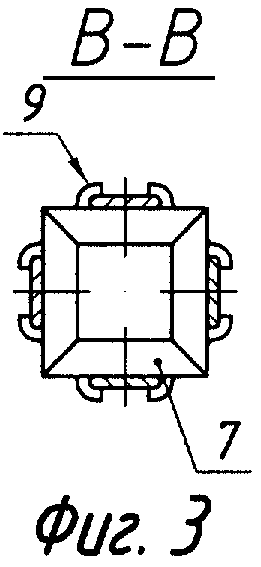
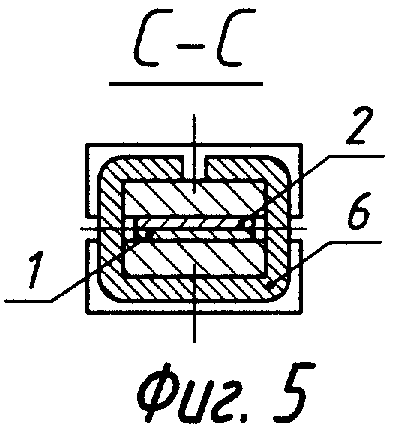
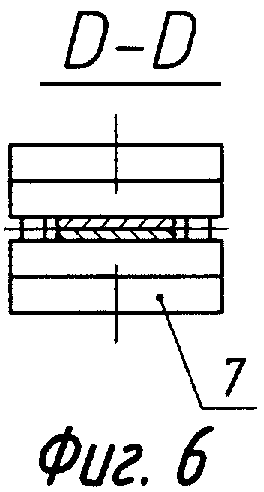
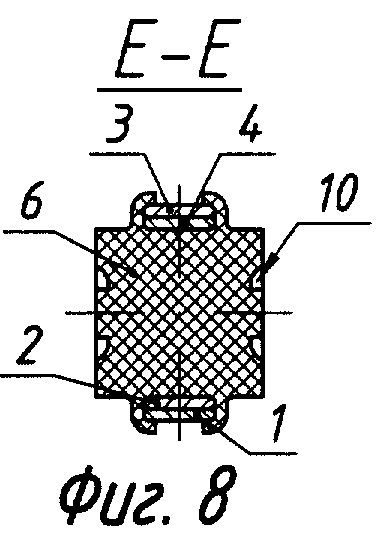
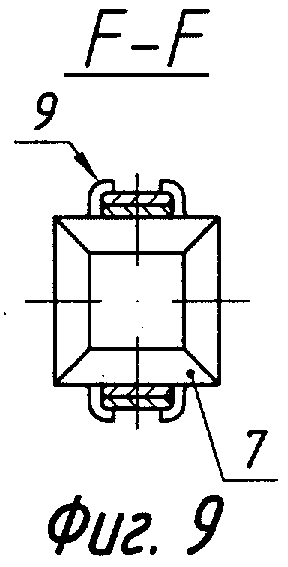
Пример ПМН, предназначенной для построения электростатических ЭМН с двумя парами полюсов, изображен на фиг.1 -3: вид сбоку участка из трех секций с разрезом по одной секции и два поперечных сечения обозначенными на фиг.1 плоскостями. Фиг.4-6 и фиг.7-9 аналогичным образом иллюстрируют примеры ПМН, предназначенных для построения ЭМН электродинамического режима работы и многофункциональных ЭМН с двумя парами полюсов на пучке плотно уложенных отрезков ПМН, допускающих компаундный режим работы соответственно.
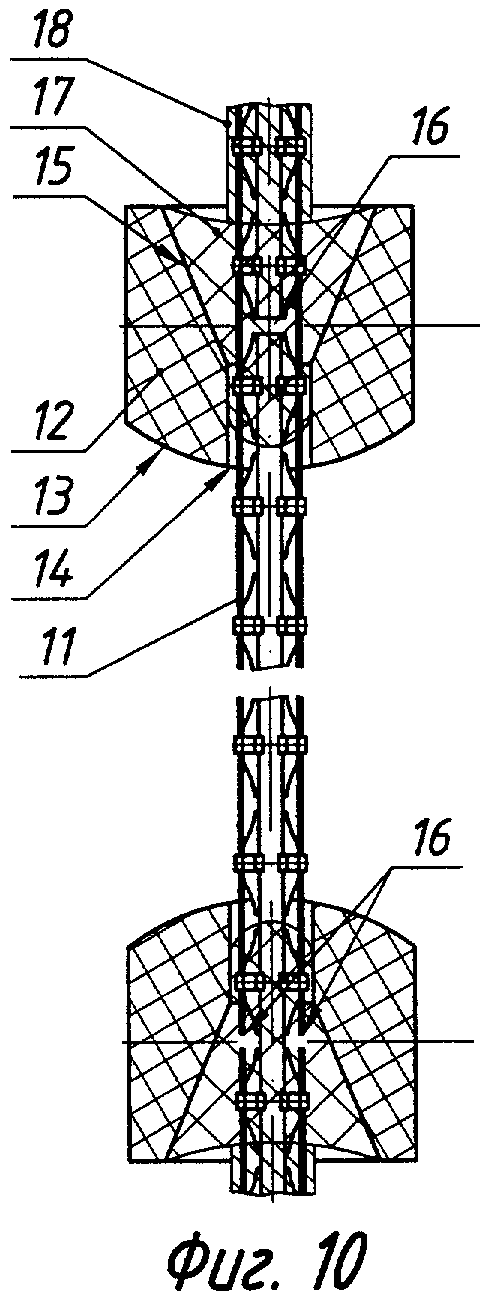
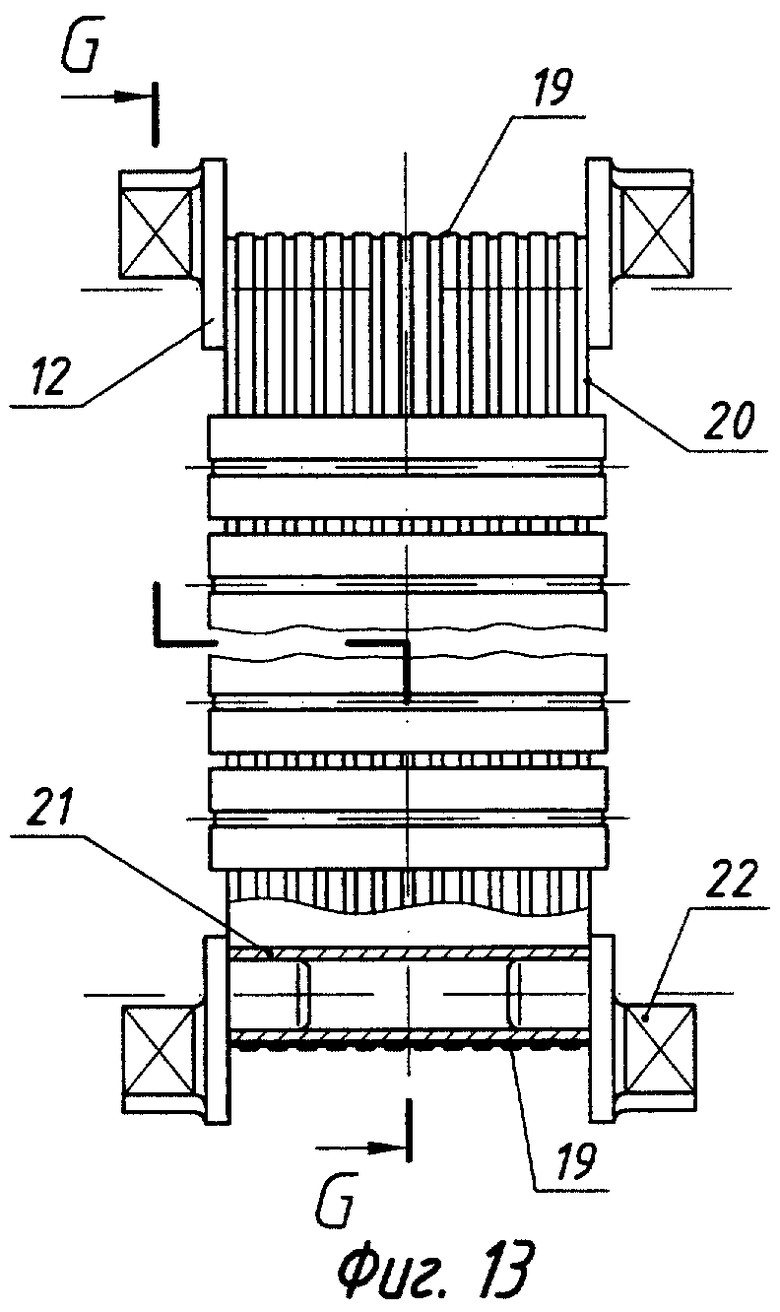
На фиг.10-12 изображен пример конструкции электростатического ЭМН, построенного на одном отрезке ПМН по фиг.1-3: вид сбоку с частичным продольным разрезом по концевым элементам (фиг.10) и два вынесенных поперечных сечения, проходящих по зонам технологических разрезов электродов, соответствующих парам полюсов ЭМН (фиг.11, 12). Фиг.13, 14 показывают пример электродинамического ЭМН, построенного на одном отрезке ПМН по фиг.4-6: виды с частичными разрезами в плане и сбоку соответственно.
Пример многофункционального ЭМН, построенного на пучке из 37 плотно уложенных отрезков ПМН по фиг.7-9, изображен на фиг.15-20:
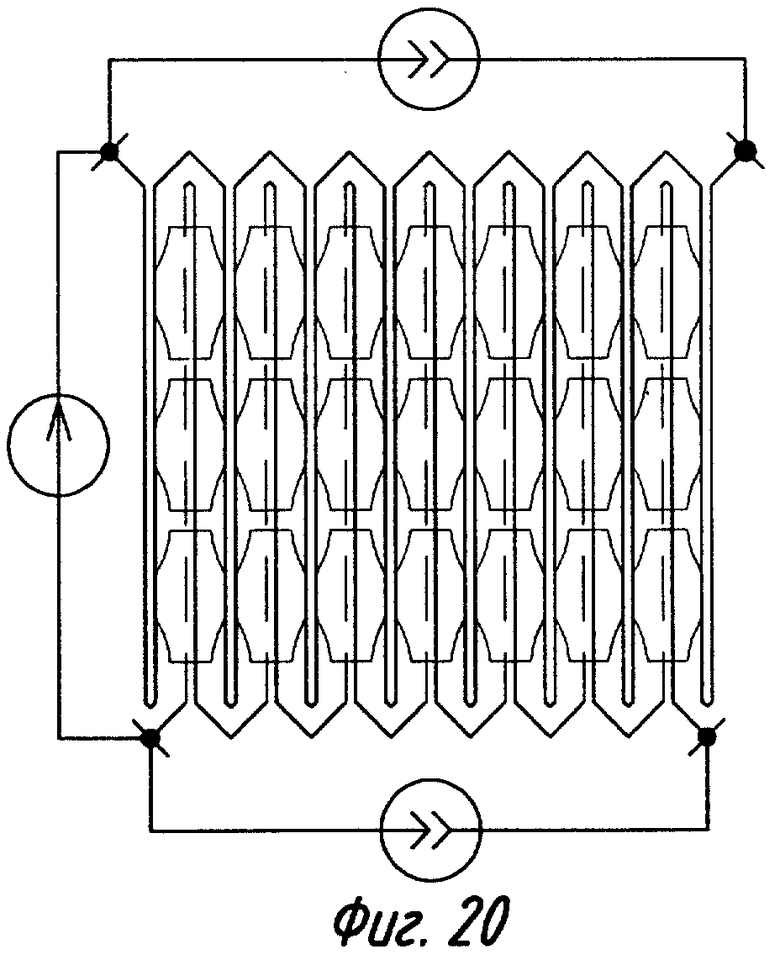
продольные разрезы, показывающие укладку отрезков ПМН в нечетных и четных слоях пучка (фиг.15, 16 соответственно), и поперечные разрезы активной области по интерцепторам и между ними (фиг.17, 18 соответственно). Схема соединения электродов, представленная на этих фигурах, обеспечивает электростатический режим работы ЭМН. Принципиальные схемы соединения электродов между собой и с источниками электрической энергии, обеспечивающие электродинамический и компаундный режимы работы, изображены на фиг.19, 20 соответственно.
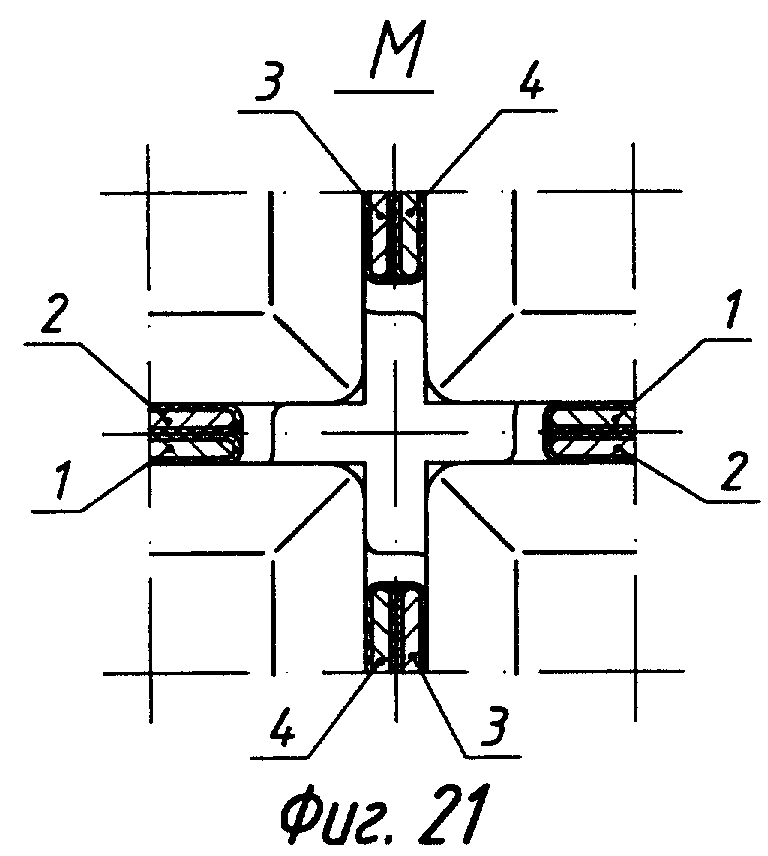
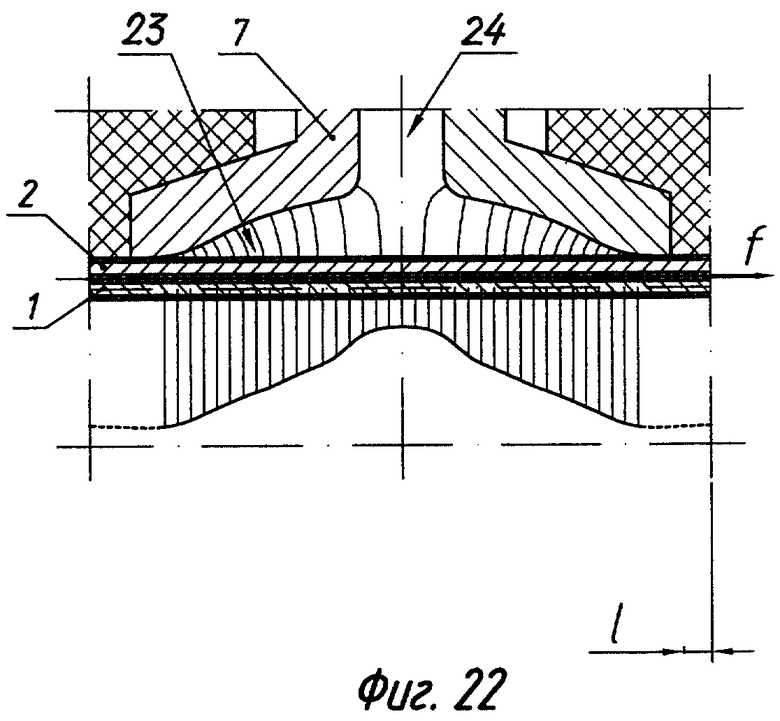
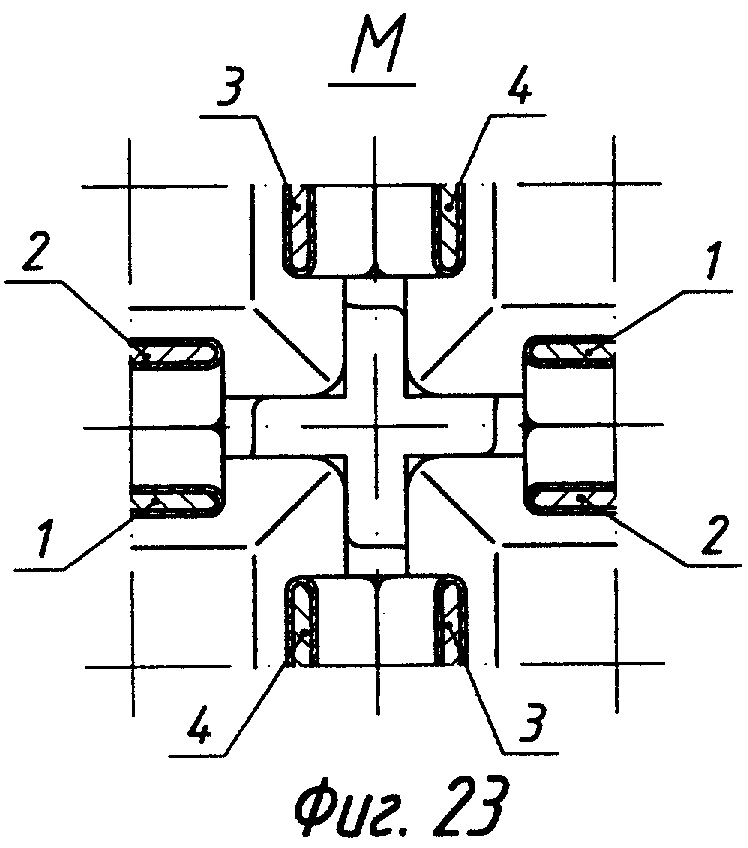
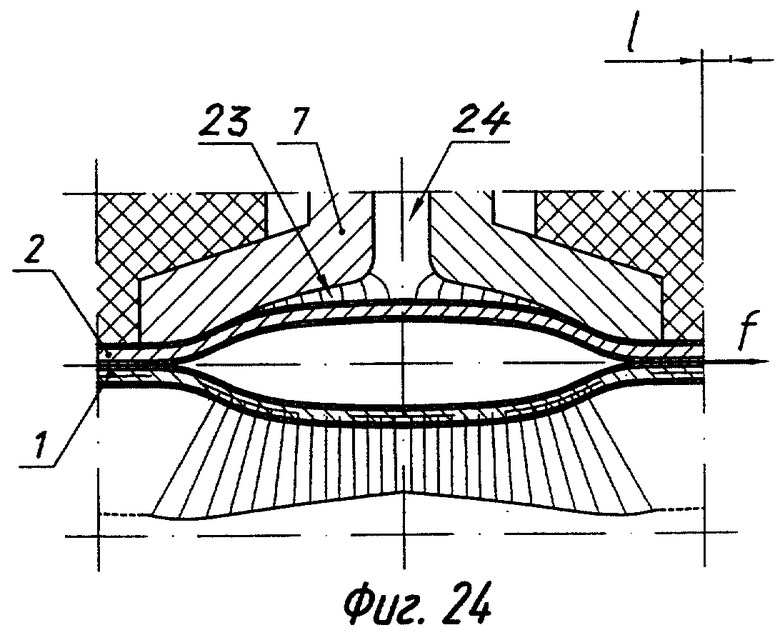
На примере удаленной от краев пучка элементарной ячейки четырехполюсного многофункционального ЭМН, выделенной и обозначенной на фиг.18, проиллюстрирована работа ЭМН при подаче на него электрической энергии в виде разности потенциалов между группами электродов, соответствующими парам его полюсов: расположение электродов, картина силовых линий электрического поля и эпюра действующих на электроды сил на моменты до и после отработки ЭМН линейного перемещения (фиг.21, 22 и фиг.23, 24 соответственно). Нижние половины интерцепторов на фиг.22 и 24, симметричные верхним, условно не показаны, а на их месте изображены эпюры действующих сил, уравновешенных на фиг.24 противодействием механической нагрузки.
Ключевыми моментами успешного осуществления настоящего изобретения являются адекватный решаемой задаче выбор места размещения и структуры электроизоляционного материала, обеспечивающего взаимную электрическую изоляцию электродов ПМН, а также выбор материалов интерцепторов, в особенности в части индукторов.
Приведенный на фиг.1-3 простейший пример демонстрирует соответственно простейшие из возможных вариантов выбора: гибкие электроды 1-4 выполнены из неизолированных металлических микропроводов плоского поперечного сечения, а их взаимная электрическая изоляция обеспечивается материалами интерцепторов 5. Последние, в свою очередь, состоят из стяжек 6, выполненных из прочного термопластичного материала с высокими показателями температурной и временной стабильности размеров, например, из группы поликарбонатов или модифицированных полиформальдегидов, и пар индукторов 7, выполненных, например, из конденсаторной сегнетокерамики с ε˜8000. Индукторы представляют собой полые внутри усеченные пирамидки миниатюрных размеров с криволинейными гранями, примерная конфигурация которых ясна из продольного разреза на фиг.1, поперечного на фиг.2 и вида в плане на фиг.3. С целью уменьшения неоднородностей электрического поля, ребра и вершины индукторов целесообразно скруглять (детальнее на фиг.21-24).
Термопластичность материала стяжек обеспечивает автоматизированное проведение сборочных операций без крайне нежелательных для микроструктурных технологий операций склеивания: индукторы, при сборке интерцепторов, под импульсным нагревом с натягом посажены на базирующие их относительно стяжек пирамидальные выступы 8, соответствующие по форме внутренним полостям в индукторах, а предварительно собранные интерцепторы, при сборке ПМН, закреплены на электродах с помощью отгибки выступающих из стяжек лепестков 9, например, путем их пропускания между нагретыми роликами.
Альтернативным вариантом выполнения индукторов, предназначенных для концентрирования электрического поля (именуемых далее электроактивными индукторами) является их изготовление из электропроводного материала, в частности металла или металлокерамического композита, например, спеченного алюминиевого порошка (САП). Электропроводный материал в электростатическом поле, как известно, ведет себя подобно диэлектрику с бесконечно большим значением ε, что делает этот вариант не противоречащим сформулированному выше признаку выполнения индукторов из материала с повышенными, по отношению к окружающей среде, эффективными значениями диэлектрической и/или магнитной проницаемости. Подобные индукторы могут быть покрыты снаружи тонкой электроизоляционной пленкой, выполненной из высокостабильного в электрическом отношении диэлектрика с относительно невысоким значением ε, например оксида или фторида алюминия, но эффективная диэлектрическая проницаемость такого индуктора за счет его металлической сердцевины будет составлять достаточно большую величину. Это исполнение индукторов для прецизионных электромеханизмов является предпочтительным, поскольку температурная и временная стабильность конденсаторной керамики с наибольшими значениями ε, в особенности вблизи температуры Кюри, невысока, и ей присуща остаточная поляризация, приводящая к гистерезису в работе электромеханизма.
Естественно, что если достаточно тонкий и в то же время прочный и гибкий слой высокостабильного электроизоляционного материала нанесен непосредственно на электроды, или сами электроды имеют сложную структуру, например, в виде металлической пленки, нанесенной на одну сторону гибкой ленточной диэлектрической подложки, то металлические электроактивные индукторы, будучи наиболее простыми в технологическом отношении и эффективными, не нуждаются в специальной изоляции. С другой стороны, получение надежной изоляции на электродах является значительно более сложной технологической проблемой, чем на индукторах, по причине ее работы с многократными деформациями.
Однако есть основания для прогноза, что двухслойная изоляция электродов, представляющая собой конформное диэлектрическое покрытие, осажденное из газовой фазы поверх конверсионного адгезионного подслоя на металле электродов, будет обладать необходимым комплексом электрических и механических свойств. В качестве адгезионного подслоя могут быть применены оксидные, фторидные, фосфатные пленки (в зависимости от вида металла электродов) или их комбинации. В качестве же конформного покрытия целесообразным представляется один вариант - полипараксилилен (парилен), осажденный в вакууме из паров его димера путем пиролиза или под действием высокочастотного разряда. В настоящее время соответствующие технологии освоены в промышленности.
Изолированные электроды позволяют реализовывать описываемые ниже более сложные в технологическом отношении варианты ПМН, позволяющие строить ЭМН с более широким комплексом функциональных возможностей по сравнению с первым вариантом.
В частности, ЭМН преимущественно электродинамического режима работы без изоляции на электродах принципиально не реализуется, поскольку у соответствующей ему ПМН единственная пара электродов 1, 2 плотно уложена в два слоя в ее поперечном сечении (фиг.4-6). Соответственно, интерцепторы 5 такого варианта ПМН содержат по два индуктора 7 наружного расположения, по форме представляющие собой накладки с симметричными криволинейными поверхностями, прилегающими к электродам. Стяжки 6 представляют собой проволочные скобки, огибающие индукторы вместе с заключенными между ними электродами.
Поскольку силовым полем, действующим в электродинамическом режиме работы, является магнитное поле, то индукторы, его концентрирующие, должны быть выполнены из ферромагнитного материала с высоким значением μ, будучи, таким образом, магнитоактивными. Однако необходимо учитывать, что степень влияния магнитоактивного индуктора на энергетику силовых взаимодействий через магнитное поле будет значительно меньшая, чем степень влияния электроактивного индуктора на энергетику силовых взаимодействий через электрическое поле. Теоретический анализ показывает, что при μ→∞ у материала индуктора эффективное значение μ у среды, окружающей электроды, не может превышать двух. Кроме того, при высоких уровнях энергий явление насыщения ферромагнитного материала индуктора может привести к изменению характера его влияния на эффективность преобразования с позитивного на негативный. Для большинства же применений ЭМН, не входящих в область высоких энергий, ожидаемое от магнитоактивных индукторов улучшение эффективности преобразования на 25-50% является полезным.
ПМН, предназначенная для плотной укладки в пучки при построении многофункциональных ЭМН (фиг.7-9), составлена из деталей, по конфигурации аналогичных изображенным на фиг.1-3, за исключением стяжек 6, лепестки 9 которых сужены по ширине, увеличены по длине и расположены только на двух противоположных боковых сторонах стяжек. На свободных от лепестков боковых сторонах таковых расположены пазы 10, профиль которых соответствует отгибаемым при закреплении электродов частям лепестков 9. Изолированные электроды 1-4 сгруппированы в две плотно уложенные пары, введенные, в свою очередь, между удлиненными лепестками стяжек и там закрепленные посредством отгибки последних. Угловой шаг расположения пар электродов в такой ПМН, предназначенной для построения ЭМН с двумя парами полюсов, составляет 180°. С учетом специфики компаундного режима работы, при котором действие электрического и магнитного полей происходит независимо, индукторы 7 целесообразно делать электромагнитоактивными, выполняя их, например, из спеченного порошка чистого (в частности, карбонильного) железа, обладающего электропроводностью и высоким значением μ одновременно.
Простейший ЭМН электростатического режима работы, построенный на базе ПМН по фиг.1-3, представляет собой мерный отрезок 11, снабженный выполненными из прочной пластмассы или керамики наконечниками 12, предназначенными для его неподвижного закрепления, с одной стороны, и связи с приводимым кинематическим звеном механической нагрузки, с другой стороны (фиг.10-12). Обращенные внутрь торцы 13 наконечников выполнены сферическими и отполированы, что придает им свойства шарниров, необходимых для поддержания строгой прямолинейности формы растянутого за наконечники отрезка ЭМН. В наконечниках выполнены аксиальные отверстия 14, по профилю соответствующие поперечному сечению пропущенной через них ПМН, причем со стороны обращенных наружу торцов наконечников в этих отверстиях выполнены воронкообразные расширения 15.
Между секциями ПМН, находящимися внутри наконечников, выполнены технологические разрезы 16, проходящие по парам противоположных электродов ПМН, соответствующих одноименным полюсам ЭМН - с каждой из сторон во взаимно перпендикулярных направлениях (фиг.11, 12). Выполнение этих разрезов в едином технологическом цикле разрезания ПМН на мерные отрезки с помощью программно-управляемой лазерной установки проблемы не составляет, поскольку для этого достаточно иметь возможность независимого управления лучом по двум ортогональным координатам в плоскости резания. Сквозные резы вдоль каждой из отдельно взятых координат будут технологическими, а вдоль обоих координат - конструктивными, оформляющими концы ПМН.
Внутрь воронкообразных расширений, с перекрытием разрезанных участков ПМН, залит жесткий и прочный диэлектрический компаунд 17, надежно фиксирующий положение наконечников по отношению к отрезку ПМН и компенсирующий двукратную потерю ее механической прочности в местах технологических разрезов. Одновременно он обеспечивает электрическую прочность взаимной изоляции противоположных полюсов ЭМН, для подключения которых к источнику электрической энергии участки ПМН, выступающие наружу за пределы наконечников, целиком (поверх всех электродов) покрыты электропроводным компаундом 18, например контактолом, соединяющим их с гибкими подводящими проводами или шлейфами (за пределами изображения на фиг.10). Такая конструкция позволяет обойтись без трудоемкой ручной разделки концов ПМН с целью отсепарирования из нее отдельных электродов и характеризуется отсутствием технологических ограничений на нижние пределы размеров элементов в микроструктурной шкале.
В качестве примера ЭМН преимущественно электродинамического режима работы приведена конструкция, требующая бóльших модификаций простейшего варианта соответствующей ПМН (фиг.4-6), но позволяющая показать потенциальные возможности, связанные с вариантом ее электродов в виде плоского кабеля, при его изготовлении по месту (фиг.13, 14).
Пара плотно уложенных электродов в виде плоского кабеля мерного отрезка ПМН 11, подобной по существенным признакам изображенной на фиг.4-6, изготовлена в едином технологическом цикле однослойной намотки, с принудительно задаваемым шагом, неизолированного микропровода плоского поперечного сечения 19 из гибкого и прочного металла, например молибдена (легированного при особо высоких требованиях к стабильности механических свойств рением) на цилиндрическую технологическую оправку с предварительно установленной тонкой и гибкой гильзой из полимерной, например полиимидной, пленки 20. Закрепление витков микропровода на пленке достигается, например, тем, что обращенная наружу ее сторона покрыта термопластичным адгезивом, а микропровод в процессе намотки прикатан горячим роликом. Результатом намотки является бесконечный (закольцованный) гибкий плоский кабель, который, будучи снятым с технологической оправки и сложенным вдвое, дает готовую пару электродов мерного отрезка ПМН, не нуждающихся в дополнительном монтаже как для последовательного соединения всех микропроводов в каждом электроде в отдельности с целью умножения потокосцепления, так и у электродов между собой с целью получения встречных направлений протекающих по ним токов. К источнику электрической энергии (источнику тока) достаточно подключить начало и конец микропровода.
Такое исполнение электродов позволяет исключительно простым и надежным способом решить задачи механики: для этого наконечники 12 достаточно выполнить, например, в виде трубчатых стержней 21, с двух сторон которых запрессованы призматические опоры 22, а длина соответствует ширине электродов ПМН. Призмы входят в кинематические пары второго рода, подобные шарнирам Гука, которые необходимы для компенсации отклонений от прямолинейности при установке ЭМН и сокращении его осевой длины при отработке линейных перемещений (являются внешними звеньями и поэтому не изображены). Наконечники 12 вложены внутрь гильзы с обмоткой перед ее складыванием вдвое для образования пары электродов ПМН. После этого форма полученной структуры зафиксирована установкой интерцепторов 5. Поскольку их индукторы непосредственно прилегают к неизолированным микропроводам электродов, ферромагнитный материал индукторов должен быть или диэлектрическим (феррит), или, при электропроводном материале последних, должна быть предусмотрена диэлектрическая пленка или прокладка между индукторами и микропроводами. Взаимная электрическая изоляция электродов на оси ПМН обеспечивается двумя слоями полимерной пленки 20.
Многофункциональный ЭМН на пучке отрезков ПМН (фиг.15-20) значительно сложнее по конструкции и технологии изготовления ранее рассмотренных вариантов с ограниченным набором функциональных возможностей, но его потенциальный технический уровень настолько выше, что именно этот вариант следует рассматривать как базовый даже для тех задач, когда ЭМН строится только для электростатического или электродинамического режимов работы. В этом варианте, с другой стороны, более простая, чем у первого варианта, подготовка мерных отрезков 11 ПМН по фиг.7-9: их нет необходимости отрезать в два этапа, выполняя частичный технологический и полный конструктивный разрезы, а можно в один прием перерезать всю группу электродов ПМН. Это связано с тем, что, хотя и первый, и последний варианты четырехполюсные, но в первом варианте четыре электрода ПМН, расположенные с угловым шагом 90°, соответствуют двум парам полюсов, а в последнем - обе плотно уложенные пары из двух электродов, расположенные с угловым шагом 180°, соответствуют лишь одной паре полюсов ЭМН. Четырехполюсные секции с общими индукторами образуются при соприкосновении своими боковыми поверхностями отрезков ПМН, смежные из которых взаимно повернуты вокруг собственной оси на половину углового шага расположения в них пар электродов - в данном случае 90°. Принцип укладки отрезков проиллюстрирован на фиг.15-18, причем видно, что соприкосновение всех электродов с индукторами обеспечивается, благодаря наличию пазов 10 у одного отрезка ПМН, в которые входят отогнутые части лепестков 9 другого отрезка.
На фиг.15, 16 показан также линейный (осевой) сдвиг в шахматном порядке смежных отрезков ПМН в каждом из слоев, который существенно упрощает решение задач соединения всех электродов пучка между собой в единую электрическую схему и их подключения к источнику энергии, в особенности, если ЭМН, подобно приведенному примеру, предназначен для электростатического режима работы.
Наконечники пучка 12 выполнены электропроводными, например металлокерамическими, и в их аксиальные отверстия 14 фигурного профиля, после продевания через них пучка, последовательно залиты и отверждены два полимерных компаунда: диэлектрический 17 и электропроводный 18, причем граница раздела этих компаундов проходит между уровнями расположения в наконечнике концов отрезков ПМН, сдвинутых в разные стороны при укладке пучка. Находящиеся под этой границей концы отрезков оказываются, таким образом, надежно закреплены и заизолированы, а концы отрезков, находящиеся над ней, электрически объединены между собой и все вместе связаны со своим электропроводным наконечником. Поскольку длина всех отрезков одинакова, то отрезки, концы которых в одном наконечнике расположены под границей раздела, в другом наконечнике расположены над ней, и наоборот. В результате пары полюсов ЭМН оказываются выведены на разные наконечники пучка ПМН.
Если ЭМН на пучке ПМН предназначены для электродинамического или компаундного режимов работы, то их электроды необходимо соединять в соответствии с принципиальными схемами, приведенными на фиг.19 и фиг.20 соответственно. Схемы составлены с учетом того, что пары полюсов ЭМН соответствуют группам относящихся к разным отрезкам ПМН пар электродов, расположенным во взаимно перпендикулярных плоскостях. Верх и низ каждой схемы соответствуют концам пучка, причем из схем следует, что каждый наконечник должен быть снабжен не одним, а по меньшей мере двумя взаимно электрически изолированными выводами, условно обозначенными как клеммы (одна из клемм может соответствовать материалу своего наконечника). Для наглядности, упрощенно изображены интерцепторы, а пары электродов, расположенные в разных плоскостях, выделены тем, что оба электрода, лежащие в плоскости, перпендикулярной плоскости изображения, показаны сплошными линиями, а из электродов, лежащих в плоскости изображения, один показан сплошной линией, а другой - пунктирной (ибо один из них фактически расположен под другим). Источники энергии, обеспечивающие электродинамический режим работы ЭМН, изображены как источники тока, а источник энергии, обеспечивающий электростатический режим работы компаундного ЭМН (фиг.20), как источник ЭДС. Два источника тока на один источник ЭДС применены с целью развязки пар полюсов по потенциалам.
Подача на группы электродов 1, 2 и 3, 4 элементарной ячейки ЭМН, обозначенной на фиг.18 и в укрупненном масштабе изображенной на фиг.21, противоположных потенциалов приводит к возникновению в ней электростатического поля, картина силовых линий которого в осевом разрезе показана в верхней части фиг.22 (по отношению к фиг.21 - вид). Электроактивные индукторы 7 являются металлическими, а электроды 1-4 - изолированными, поэтому области концентрации напряженности поля (сгущения силовых линий) находятся у оснований индукторов, вблизи вершин клиновидных зазоров 23 между индукторами и касающимися их электродами. По мере приближения к вершинам индукторов напряженность электрического поля спадает по гладкой кривой, характер которой определяется заданным профилем клиновидных зазоров (крутизной и кривизной боковых граней индукторов), достигая минимальных значений в середине ячейки (секции), где между вершинами индукторов имеется аксиальный зазор 24. Поэтому эпюры распределенных нагрузок, связанных с кулоновскими взаимодействиями электродов через индукторы, имеют вид, подобный изображенному в нижней части фиг.21 (картина электрического поля, для наглядности, показана привязанной к верхнему электроду, а эпюра действующих сил - к нижнему). С другой стороны к электродам приложена растягивающая сила f, связанная с противодействием механической нагрузки, которая приводит все гибкие электроды в строго прямолинейное положение.
Элементарные рассуждения из области геометрической статики приводят к выводу, что, если считать электроды идеально гибкими и нерастяжимыми, то любая, даже сколь угодно малая распределенная нагрузка, приложенная к электродам поперек их оси, будет трансформироваться в действующую вдоль них сосредоточенную силу (т.е. силу действия ЭМН) с бесконечно большим передаточным отношением. Поэтому электроды обязательно изогнутся - каждый в сторону ближайшего к нему индуктора, в результате чего элементарная ячейка ЭМН, совершив рабочее перемещение величиной l, примет вид, подобный изображенному на фиг.23, 24. Наряду с уменьшением величины аксиального зазора 24, произойдет изменение и характера клиновидных зазоров 23, поскольку прилегающие к основаниям индукторам части электродов, обогнув, как по копирам, боковые поверхности индукторов, займут новые положения, не параллельные их средней геометрической оси. Следовательно, текущее значение передаточного отношения перестанет составлять бесконечно большую величину, а будет тем меньше, чем на больший угол отклонятся прилегающие к индукторам части электродов от первоначально прямолинейного положения. Поэтому уменьшится и величина действующей силы, пока не будет достигнуто равновесное положение, определяемое противодействием приложенной нагрузки и поданной разностью потенциалов.
При этом линейное перемещение, отработанное ЭМН, составит величину L=nl, где n - число секций, расположенных по осевой длине активных участков (расположенных между наконечниками) отрезков ПМН, из которых составлен ЭМН. Усилия же, передаваемые механической нагрузке каждым из отрезков ПМН, суммируются, поэтому действующая сила ЭМН составит величину F=mf, где m - число отрезков ПМН в пучке. Отсюда следует, что, выбирая надлежащим образом значения m и n, можно получить любые наперед заданные величины рабочего хода и действующей силы ЭМН при сколь угодно малых значениях силы и перемещения, обеспечиваемых в пределах одной секции ПМН (ячейки ЭМН).
Из вышеизложенного следует также, что ЭМН обладают тяговой характеристикой падающего характера, при которой максимальное значение тягового усилия имеет место в начале рабочего хода, а не в конце его, как, например, у электромагнитов и подобных им устройств. Это обстоятельство является исключительно благоприятным для применения ЭМН, поскольку именно в начале рабочего хода требуются наибольшие усилия для преодоления инерции покоя механической нагрузки, а в конце - наименьшие для плавного останова. Кроме того, электропривод на таком ЭМН легко может быть выполнен как управляемый напряжением позиционер, поскольку при изменяющемся по известному закону противодействии механической нагрузки величина перемещения будет определяться только поданной на электроды разностью потенциалов. Цифровое управление ЭМН может осуществляться таким образом всего по одному проводу при его питании от цифроаналогового преобразователя (ЦАП).
Профилируя соответствующим образом грани индукторов, можно получить практически любой заданный техническими требованиями на ЭМН вид его тяговой характеристики, за исключением имеющей возрастающий характер. В частности, выполняя индукторы в виде усеченных пирамидок, у которых площади вершины и основания близки между собой (форма, наиболее близкая к призматической), можно получить тяговую характеристику, соответствующую передаче максимальной силы в пределах минимального линейного перемещения. Уменьшая же площадь вершины, т.е. увеличивая наклон граней, можно изменить характер тяговой характеристики в сторону уменьшения силы и увеличения перемещения. Единственным ограничением на криволинейный профиль граней индукторов является условие, что касательная, проведенная к поверхности грани у основания индуктора, должна быть параллельна его высоте (оси ПМН). Этим условием определяется отсутствие изломов электродов при их изгибе (надежность и ресурс работы ЭМН), поскольку индукторы одновременно являются копирами, форму которых повторяют прилегающие к ним электроды.
К аналогичным выводам можно прийти, если рассмотреть силовые взаимодействия, согласно закону Ампера, между токовыми электродами через магнито- и электромагнитоактивные индукторы в электродинамических и компаундных ЭМН. Для этих режимов работы уровень мощности не ограничен электропрочностью окружающей среды и используемых диэлектриков, однако потери энергии на Джоулево тепло весьма велики. Учет ранее описанных униполярных взаимодействий для всех режимов работы ЭМН на пучке плотно уложенных ПМН приводит к выводу, что в нем проявляется фактор позитивного взаимного влияния или синергизма составляющих его элементарных электромеханических преобразователей, обеспечивающий в нем сверхсуммарную энергоотдачу по отношению к варианту, при котором ПМН в поперечном сечении пучка уложены неплотно.
Особый интерес представляет работа ЭМН при отсутствии жестких ограничений на электромеханическую постоянную времени в условиях окружающей среды, представляющей собой жидкое диэлектрическое заполнение. Если считать, что у такой среды ε˜2,5 (это снижает эффективность влияния электроактивных индукторов), но электрическая прочность на порядок более высокая, чем у атмосферы, то в силу того, что энергия заряженного конденсатора пропорциональна первой степени емкости, но квадрату приложенного напряжения, выигрыш по удельной энергии получается не менее чем сорокакратный. Увеличивая вязкость жидкого диэлектрика, можно обеспечить хорошее демпфирование ЭМН, предохранив тем самым его электроды от необратимых (пластических) деформаций при импульсных перегрузках. В остальных случаях среду, заполняющую ЭМН, целесообразно выбирать из числа газов, таких, например, как осушенный азот, водород, гелий или шестифтористая сера (элегаз). Следует подчеркнуть, что контакт ЭМН с открытой атмосферой должен быть исключен по причине того, что иначе в его клиновидных зазорах микронной величины будет накапливаться и удерживаться пыль.
Очевидно, что если заряженный в конце рабочего хода ЭМН растянуть, уменьшив тем самым величину емкости между его электродами, то разность их потенциалов и связанная с ней энергия электрического поля резко возрастут, подобно тому, как это происходит в емкостных параметрических генераторах. С этим связана принципиальная возможность применения ЭМН для решения задачи обратного электромеханического преобразования, что представляет практический интерес, если механическая энергия представлена в виде колебаний. С учетом того, что ЭМН, заполненный жидким диэлектриком, представляет собой хороший демпфер, на этой основе можно строить, например, амортизаторы, в которых поглощаемая энергия механических колебаний не только рассеивается в виде тепла, но и частично утилизируется в электрической форме.
ЛИТЕРАТУРА
1. И.Н.Матвеев, А.Н.Сафонов, И.Н.Троицкий, Н.Д.Устинов; под ред. Н.Д.Устинова. Адаптация в информационных оптических системах. - М.: Радио и связь, 1984.
2. Д.А.Бут. Бесконтактные электрические машины. - М.: Высшая школа, 1990.
3. А.А.Денисов, В.С.Нагорный. Пневматические и гидравлические устройства автоматики. - М.: Высшая школа, 1978.
4. В.М.Плужников, В.С.Семенов. Пьезокерамические твердые схемы. М.: Энергия, 1971.
5. А.А.Холодилов и др. Многоразрядный цифровой пьезопривод. Патент Российской Федерации №2017315.










Изобретение относится к области электромеханики и представляет собой электропривод линейного перемещения, выполненный в виде микроструктурного устройства, содержащего гибкие и деформируемые элементы. Сущность изобретения: по меньшей мере два одноосно ориентированных взаимно электрически изолированных гибких непрерывных электрода, обладающих электрической проводимостью по меньшей мере в осевом направлении, через равные интервалы длины (периодически) перехвачены жестко фиксирующими их взаиморасположение микроструктурными, функциональными элементами - интерцепторами. Полная осевая длина интерцепторов на заданную величину меньше периода их размещения по оси, вдоль которой ориентированы электроды. Интерцепторы, в свою очередь, содержат, по меньшей мере, по два микроструктурных образования, выполненных из материала с повышенными, по отношению к окружающей среде, эффективными значениями диэлектрической и/или магнитной проницаемости - индуктора. Индукторы симметрично расположены по обе стороны средней части осевой длины интерцепторов, в пределах которой они скреплены с электродами, и приведены в соприкосновение с по меньшей мере половиной от общего числа электродов, вблизи мест их крепления, криволинейными цилиндрическими поверхностями, соответствующими единому заданному профилю клиновидных зазоров между индуктором и касающимися его электродами. Полученная структура в различных описанных вариантах выполнения электродов, расположения их относительно индукторов, а также схем соединения электродов между собой и с источниками электрической энергии позволяет строить электроприводы линейного перемещения в широкой шкале мощностей и размеров, начиная от микроэлектромеханических систем адаптивной оптики и заканчивая силовыми исполнительными механизмами, заменяющими гидравлические и пневматические агрегаты. Техническим результатом изобретения является получение технических средств, обладающих широкими функциональными возможностями. 9 з.п. ф-лы, 24 ил.
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКОЙ ПЕЧАТНОЙ ОБМОТКИ | 1994 |
|
RU2054783C1 |
| Электропривод | 1982 |
|
SU1051664A1 |
| Линейный электропривод | 1979 |
|
SU838941A1 |
| US 3084420 А, 09.04.1963. | |||

