ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к электромеханической области, в частности к приводному устройству и способу изготовления устройства.
УРОВЕНЬ ТЕХНИКИ
Приводное устройство представляет собой устройство, которое может выполнять передачу и/или преобразование энергии, например электрический двигатель. Из-за обратимости между генератором и электрическим двигателем упомянутый здесь «электрический двигатель» может включать в себя как электрический двигатель, так и генератор или может также представлять собой реверсивный электрический двигатель с двойными функциями. Существует широкое разнообразие типов приводных устройств, однако обычно каждый из них имеет статор и подвижный элемент. В настоящем описании движущаяся часть в устройстве именуется подвижным элементом, а относительно неподвижная часть называется статором. В некоторых приводных устройствах подвижный элемент и статор соединены деформируемым соединительным элементом, простым примером которого является линейный электродинамический сервопривод (VCM, voice-coil motor, или привод блока магнитных головок), который широко используется в оптической области, например в модуле автоматической фокусировке камеры сотового телефона.
Основная конструкция электродинамического сервопривода показана на фиг. 1, которая обычно включает в себя статор 11, подвижный элемент 12 и пружину 13, действующую в качестве деформируемого соединительного элемента. Пружина соединяет подвижный элемент и статор. На подвижном элементе жестко закреплена нагрузка (не показана). На фиг. 1 статор является постоянным магнитом и катушка 121 возбуждения намотана на подвижный элемент. После подачи питания на катушку возбуждения подвижный элемент линейно перемещается под действием магнитного поля статора. Движение подвижного элемента в противоположном направлении может быть достигнуто путем подачи обратного тока на катушку возбуждения или с использованием восстанавливающей силы пружины. В других примерах также возможно, чтобы подвижный элемент представлял собой постоянный магнит и катушка возбуждения являлась частью статора.
Электродинамический сервопривод с описанной выше конструкцией может с точностью определить место нагрузки (например, перемещение фокусной линзы в нужное положение) с помощью равновесия между электромагнитной силой, создаваемой приводным катушкой, и силой упругости пружины. В целом сила упругости пружины пропорциональна ее смещению в рабочем диапазоне, что приводит к тому, что чем больше смещение подвижного элемента, тем большая электромагнитная сила требуется и тем больше ток катушки возбуждения. Когда подвижный элемент должен находиться в фиксированном положении (например, положении для фокусировки) в течение длительного времени, ток катушки возбуждения необходимо поддерживать в течение длительного времени, что приводит к большему расходу статической удерживающей силы электродинамического сервопривода. По указанным выше причинам электродинамический сервопривод, как правило, подходит для применения короткого хода, например фокусировки. Тем не менее, целей длительного хода (например, масштабирования) трудно достичь с помощью электродинамического сервопривода из-за чрезмерного потребления электроэнергии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с задачей настоящего изобретения предложено приводное устройство, которое может включать в себя статор, подвижный элемент и деформируемый соединительный элемент. Подвижный элемент может быть соединен со статором через деформируемый соединительный элемент. В случае если не была приложена экзогенная движущая сила, деформируемый соединительный элемент удерживается в положении х0 равновесия сил. Силы, воздействующие на деформируемый соединительный элемент, могут включать в себя силу деформации деформируемого соединительного элемента и первую естественную силу, противоположную направлению силы деформации. Экзогенная движущая сила может приводить в действие подвижный элемент или деформируемый соединительный элемент для деформирования таким образом, чтобы положение подвижного элемента относительно статора менялось.
В соответствии с другим объектом настоящего изобретения предложен способ изготовления устройства, который может включать в себя изготовление статора, подвижного элемента и деформируемого соединительного элемента. Подвижный элемент может соединяться со статором через деформируемый соединительный элемент. До того как приложена экзогенная движущая сила, первая естественная сила может быть приложена к деформируемому соединительному элементу таким образом, чтобы деформируемый соединительный элемент поддерживался в положении х0 равновесия сил под действием собственной силы деформации и первой естественной силы, противоположной направлению силы деформации. А затем экзогенная движущая сила может приводить в действие подвижный элемент или деформируемый соединительный элемент для деформирования таким образом, чтобы положение подвижного элемента относительно статора менялось.
В приводном устройстве в соответствии с настоящим изобретением, так как приводное устройство поддерживает баланс под действием пары сил, которые не потребляют внешнюю энергию, то есть силы деформации деформируемого соединительного элемента и первой естественной силы, только небольшая экзогенная движущая сила требуется, когда приводное устройство работает в непосредственной близости от точки равновесия. Поэтому потребление электроэнергии снижается и эффективность использования экзогенной движущей силы увеличивается.
Конкретные варианты осуществления настоящего изобретения будут подробно описаны ниже со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схематический вид конструкции существующего электродинамического сервопривода;
Фиг. 2 представляет собой схематический вид эквивалентной конструкции приводного устройства в соответствии с настоящим изобретением;
Фиг. 3 представляет собой схематический вид конструкции переменного конденсатора варианта осуществления 1.1;
Фиг. 4 представляет собой схематический вид конструкции вариообъектива варианта осуществления 1.2;
Фиг. 5 представляет собой схематический вид конструкции генератора естественного энергии варианта осуществления 1.3;
Фиг. 6 представляет собой схематический вид конструкции электрического двигателя варианта осуществления 1.3;
Фиг. 7 представляет собой схематический вид эквивалентной конструкции электродинамического сервопривода в соответствии с настоящим изобретением;
Фиг. 8 представляет собой схематический вид намоточного режима четырехслойной печатной схемы в соответствии с настоящим изобретением;
Фиг. 9 представляет собой схематический вид намоточного режима другой четырехслойной печатной схемы в соответствии с настоящим изобретением;
Фиг. 10 представляет собой схематический вид многовитковой цепной кольцевой катушки в соответствии с настоящим изобретением;
Фиг. 11 представляет собой схематический вид конструкции электродинамического сервопривода варианта осуществления 2.1;
Фиг. 12 представляет собой схематический вид конструкции электродинамического сервопривода варианта осуществления 2.2;
Фиг. 13 представляет собой схематический вид конструкции электродинамического сервопривода варианта осуществления 2.3; а также
Фиг. 14 представляет собой схематический вид конструкции электродинамического сервопривода варианта осуществления 2.4.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Эквивалентная структура приводного устройства в соответствии с объектом настоящего изобретения показана на фиг. 2, которая может включать в себя статор 21, подвижный элемент 22 и деформируемый соединительный элемент 23. Подвижный элемент может соединяться со статором с помощью деформируемого соединительного элемента. Деформируемый соединительный элемент, показанный на фиг. 2, обычно может представлять собой двойную винтовую пружину. В конкретных вариантах осуществления множество деформируемых соединительных элементов с различными формами могут быть использованы в соответствии с фактическими потребностями, с тем условием, что они могут обеспечить силы, которые положительно связаны с деформацией. Например, деформируемый соединительный элемент может представлять собой пружину или упругий лист, который может генерировать силу упругости на основе упругой деформации.
В случае если не была приложена экзогенная движущая сила, деформируемый соединительный элемент может находиться в положении х0 равновесия сил. Силы, действующие на деформируемый соединительный элемент, могут включать в себя силу F1 деформации деформируемого соединительного элемента и первую естественную силу F2, противоположную направлению силы деформации.
Экзогенную движущую силу прикладывают для приведения в действие деформируемого соединительного элемента для деформирования таким образом, чтобы положение подвижного элемента относительно статора менялось. Экзогенной движущей силой может быть сила, возникающая при потреблении внешней энергии. Упомянутая здесь внешняя энергия может включать в себя природную энергию, такую как энергия воды, энергия ветра, энергии приливов или солнечную энергию, и т.д., а также может включать в себя преобразованную энергию, например, электрическую энергию или механическую кинетическую энергию. Экзогенная движущая сила может быть реализована непосредственно как действие внешней энергии (например, сила воды или сила ветра может непосредственно воздействовать элемент приемки силы приводного устройства, чтобы создать силу тяги, или давление) или косвенно (например, механическая сила может передаваться на элемент приемки силы путем передачи, чтобы получить передаваемую механическую силу) воздействовать на приводное устройство. Экзогенная движущая сила может также представлять собой силу, созданную преобразованием энергетической формы внешней энергии, такую как электромагнитная сила или электрогенерирующая механическая сила, полученная путем преобразования электрической энергии в механическую энергию.
Сила деформации может представлять собой силу, которая положительно связана с деформацией деформируемого соединительного элемента, а первый естественная сила может быть силой, которая ранее объективно существует без потребления внешней энергии. Первая естественная сила может иметь разнообразие форм, например магнитная сила притяжения или отталкивания между магнитами, сила тяжести, сила деформации, создаваемая заданной деформацией, давление заданной текучей среды или газа или сила электрического поля (например, электростатическая сила притяжения или отталкивания между электрическими зарядами с противоположной или одинаковой полярностью или сила электрического поля, генерируемая магнитным полем и т.д.). Первая естественная сила может быть связана с положением подвижного элемента относительно статора (положение подвижного элемента относительно статора обычно обозначает деформацию деформируемого соединительного элемента), однако противоположна направлению силы деформации. В целях экономии энергии помимо того что она противоположна направлению силы деформации деформируемого соединительного элемента, первая естественная сила предпочтительно положительно связана с деформацией деформируемого соединительного элемента (например, k2>0, как описано ниже). Специалисту в данной области техники понятно, что приводное устройство может быть соответствующим образом сконфигурировано в соответствии с типом используемой первой естественной силы (например, путем применения соответствующих магнитов или электрических зарядов), чтобы создать требуемую первую естественную силу.
Таким образом, в соответствии с другим объектом настоящего изобретения предложен способ изготовления устройства. Способ может включать в себя изготовление статора, подвижного элемента и деформируемого соединительного элемента, с помощью которого подвижный элемент соединен со статором, и приложение первой естественной силы к деформируемому соединительному элементу, прежде чем экзогенная движущая сила будет приложена таким образом, чтобы деформируемый соединительный элемент поддерживался в положении х0 равновесия сил под воздействием собственной силы деформации и первой естественной силы, противоположной направлению силы деформации.
Для простоты коэффициент релевантности между силой деформации и деформацией именуется коэффициентом k1 вариации, а коэффициент релевантности между первой естественной силой и положением деформации именуется коэффициентом к2 вариации. Как правило, в непосредственной близости от положения х0 равновесия сил отношение деформации силы F1 деформации и первой естественной силы F2 может быть упрощенно выражено следующим образом:
F1=k1*x,
F2=F0+k2*x,
где х представляет собой переменную положения, которая координирует положение, в котором деформирование деформируемого соединительного элемента равно нулю, в качестве начала координат (очевидно, что х при этом представляет собой деформацию). F0 является величиной первой естественной силы, воздействующей на деформируемый соединительный элемент в положении, при котором деформация равна нулю. k1 может быть постоянной (например, в том случае, когда пружина работает в линейной области), либо переменной величиной (например, если речь идет о том, что пружина работает в нелинейной области). Аналогичным образом k2 может быть постоянной или переменной величиной. k1 противоположна k2 по направлению и имеет тот же знак, что и k2.
Таким образом, положение х0 равновесия сил деформируемого соединительного элемента под действием F1 и F2, может быть получено:
F0+k2*x0=k1*x0,
x0=F0/(k1-k2),
Можно видеть, что когда приводное устройство работает в непосредственной близости от положения х0 равновесия сил, эквивалентный коэффициент вариации деформируемого соединительного элемента, который должен быть преодолен с помощью экзогенной движущей силы, составляет лишь (k1-k2), что меньше коэффициента k1 вариации, когда первая естественная сила не приложена.
Таким образом, потребление энергии снижается. В общем случае k1 больше, чем k2. Конечно, также возможно, что k2 больше k1 (х0 будет равно максимальной деформации, и экзогенная движущая сила будет использоваться, чтобы выдерживать разницу между первой естественной силой и максимальной силой деформации деформируемого соединительного элемента), с тем условием, как k2-k1<k1, что будет сходным образом снижать потребление энергии экзогенной движущей силы.
В предпочтительном варианте осуществления положение х0 равновесия сил может находиться на одной из или между двумя конечными точками рабочего диапазона деформируемого соединительного элемента, чтобы сохранить нулевое потребление энергии в соответствующем рабочем состоянии. Рабочий диапазон деформируемого соединительного элемента здесь может относиться к диапазону [хa, хb] перемещения подвижного элемента. Для большинства применений x0 может быть предпочтительно установлен как xa или xb или (xa+xb)/2, что конкретно может быть определено в соответствии с моделью движения подвижного элемента и целью оптимизации.
Управляемое устройство может быть изготовлено в соответствии со способом изготовления устройства настоящего изобретения, в котором экзогенная движущая сила может выступать в качестве управляющего входного сигнала, а деформация деформируемого соединительного элемента или эффекты, вызванные деформацией, могут выступать в качестве выходного сигнала или управляемых переменных состояний. Некоторые конкретные варианты осуществления изобретения будут описаны в качестве примера далее.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 1.1
Предложен способ изготовления переменного конденсатора. Статор и подвижный элемент могут включать в себя первый электрод и второй электрод, которые имеют электрические заряды с противоположной или одинаковой полярностью соответственно. Деформируемый соединительный элемент может представлять собой листовую пружину. Первая естественная сила может включать в себя электростатическую силу притяжения или отталкивания между первым электродом и вторым электродом. Между статором и подвижным элементом может быть дополнительно размещена пьезоэлектрическая керамика или металл с памятью, и экзогенная движущая силы может включать в себя силу деформации, генерируемую пьезоэлектрической керамикой или металлом с памятью после подачи на них питания. Листовая пружина может быть изготовлена из материала с высокой диэлектрической проницаемостью и быть покрыта изоляционным покрытием на своей внешней поверхности. Либо листовая пружина может быть интегрирована с пьезоэлектрической керамикой или металлом с памятью.
Первая естественное сила может представлять собой электростатическую силу, которую будет необходимо пополнять только тогда, когда имеется утечка. Внешняя энергия, по существу, не расходуется. Приводное устройство (переменный конденсатор), изготовленный в соответствии со способами, описанными выше, показан на фиг. 3, в котором металлический лист 311 отрицательной полярности действует в качестве статора, а металлический лист 32 положительной полярности действует в качестве подвижного элемента, а листы из пьезоэлектрической керамики или металла 312 с памятью и листовая пружина 33 между металлическими листами выступают в качестве деформируемого соединительного элемента.
Когда относительно высокое напряжение ранее подавалось на металлические листы с положительной полярностью и отрицательной полярностью, сила притяжения (первая естественная сила) будет генерироваться между положительным полюсом металлического листа и отрицательным полюсом металлического листа. Сила притяжения будет возрастать при уменьшении расстояния между двумя листами и удовлетворяет требованию k1-k2<k1. При подаче напряжения на пьезоэлектрическую керамику или металл с памятью будет возникать деформация, и, таким образом, будет создаваться сила тяги (экзогенная движущая сила) для изменения положения положительного и отрицательного полюса. Из-за предварительно приложенной электростатической силы только разница между силой упругости пружины и электростатической силой (то есть (k1-k2) * х) должна быть выдержана, когда на пьезоэлектрическую керамику или металл с памятью подается напряжение.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 1.2
Предложен способ изготовления вариообъектива. Статор и подвижный элемент могут включать в себя первый электрод и второй электрод, которые имеют электрические заряды с противоположной или одинаковой полярностью соответственно. Деформируемый соединительный элемент может представлять собой листовую пружину. Первая естественная сила может включать в себя электростатическую силу притяжения или силу отталкивания между первым электродом и вторым электродом. Статор может быть дополнительно снабжен пьезоэлектрической керамикой или металлом с памятью, а экзогенной движущая сила включает в себя силу деформации, создаваемая пьезоэлектрической керамической или металлом с памятью при подаче на них питания. Подвижный элемент может быть полым, а узел фокусирующего объектива или вариообъектива установлен на внутренней части подвижного элемента.
Приводное устройство (вариообъектив), изготовленное в соответствии со способами, описанными выше, показано на фиг. 4 и подобно тому, что показано на фиг. 3. Опорный элемент 413 и металлический лист 411 с положительной полярностью действуют в качестве статора, другой металлический лист 42 с положительной полярностью действует в качестве подвижного элемента, а лист из пьезоэлектрической керамики или металла 412 с памятью и листовая пружина 43 между двумя металлическими листами с положительной полярностью действуют в качестве деформируемого соединительного элемента. По сравнению с фиг. 3 разница в том, что пара электродов с одинаковой полярностью используется таким образом, что первая естественная сила превратилась в силу отталкивания из силы притяжения и что один электрод переместился в положение между пьезоэлектрической керамикой или металлом с памятью и листовой пружиной таким образом, что лист из пьезоэлектрической керамики нажимает на листовую пружину, нажимая на металлический лист с положительной полярностью.
В варианте осуществления 1.1 и варианте осуществления 1.2, описанных выше, листовая пружина может быть выполнена за одно целое с пьезоэлектрической керамикой или металлом с памятью.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 1.3
Предложен способ изготовления генератора природной энергии. Подвижный элемент может включать в себя первый магнит, который может представлять собой постоянный магнит. Деформируемый соединительный элемент может представлять собой пружину или винтовую пружину. Материал винтовой пружины может включать в себя проводящие материалы. Винтовая пружина может выступать в качестве катушки возбуждения. Подвижный элемент может выступать в качестве подвижного элемента генератора или может быть использован для приведения в действие подвижного элемента генератора. Экзогенная движущая сила может включать в себя внешнюю силу, действующую на подвижный элемент. Внешняя сила может быть получена из природной энергии. Первый магнит может быть расположен на криволинейном наклонном участке. Первая естественная сила может включать в себя составляющую силы тяжести первого магнита в направлении, противоположном направлению силы упругости пружины. Так как коэффициент вариации силы тяжести над положением в свободном состоянии очень мал, криволинейный наклонный участок используется для увеличения коэффициента вариации составляющей силы тяжести в направлении, противоположном направлению силы упругости винтовой пружины.
Приводное устройство (генератор природной энергии), изготовленный в соответствии со способами, описанными выше, показан на фиг. 5. Фиксирующая стенка 51 может выступать в качестве статора и может быть изготовлена из постоянного магнита. Магнит 521 и упорная пластина 522, закрепленная на магните 521, могут выступать в качестве подвижного элемента, быть размещенными на криволинейном наклонном участке 523 и двигаться по криволинейному наклонному участку под воздействием ветра или воды. Пружина или винтовая пружина 53 могут выступать в качестве деформируемого соединительного элемента. Пружина или винтовая пружина 53 могут просто передавать магнитную силу, обеспечиваемую фиксирующей стенкой постоянного магнита, или могут также выступать в качестве катушки возбуждения для усиления магнитной силы. Когда приводное устройство используется в качестве генератора, пружина может восстановить подвижный элемент и повысить эффективность использования воды и ветра посредством предварительного равновесия с помощью силы тяжести подвижного элемента. В непосредственной близости от точки x0 предварительного равновесия необходима лишь небольшая внешняя сила, чтобы нарушить баланс, чтобы переместить подвижный элемент и тем самым заставить соответствующие генерирующие катушки передвигаться.
Конструкции, описанные выше, могут также быть пригодны для электродвигателя. Как видно из фиг. 6, фиксирующая стенка 61 может выступать в качестве статора, который может быть изготовлен из постоянного магнита или немагнитных материалов. Подвижный элемент может включать в себя первый магнит 621, расположенный на криволинейном наклонном участке 623. Первый магнит может быть постоянным магнитом. Деформируемый соединительный элемент 63 может представлять собой винтовую пружину из материалов, которые могут включать в себя проводящие материалы. Винтовая пружина может выступать в качестве катушки для приведения в действие подвижного элемента. Экзогенная движущая сила может включать в себя электромагнитную силу, произведенную винтовой пружиной для приведения в действие подвижного элемента. Первая естественная сила может включать в себя составляющую силы тяжести первого магнита в направлении, противоположном направлению силы упругости пружины. Поскольку предварительно достигается баланс между составляющей силы тяжести первого магнита и силой упругости пружины, в непосредственной близости от точки x0 равновесия сил, винтовая пружина может приводить первый магнит в возвратно-поступательное движение и тем самым привести механические конструкции, которые должны управляться, в движение с помощью небольшого тока.
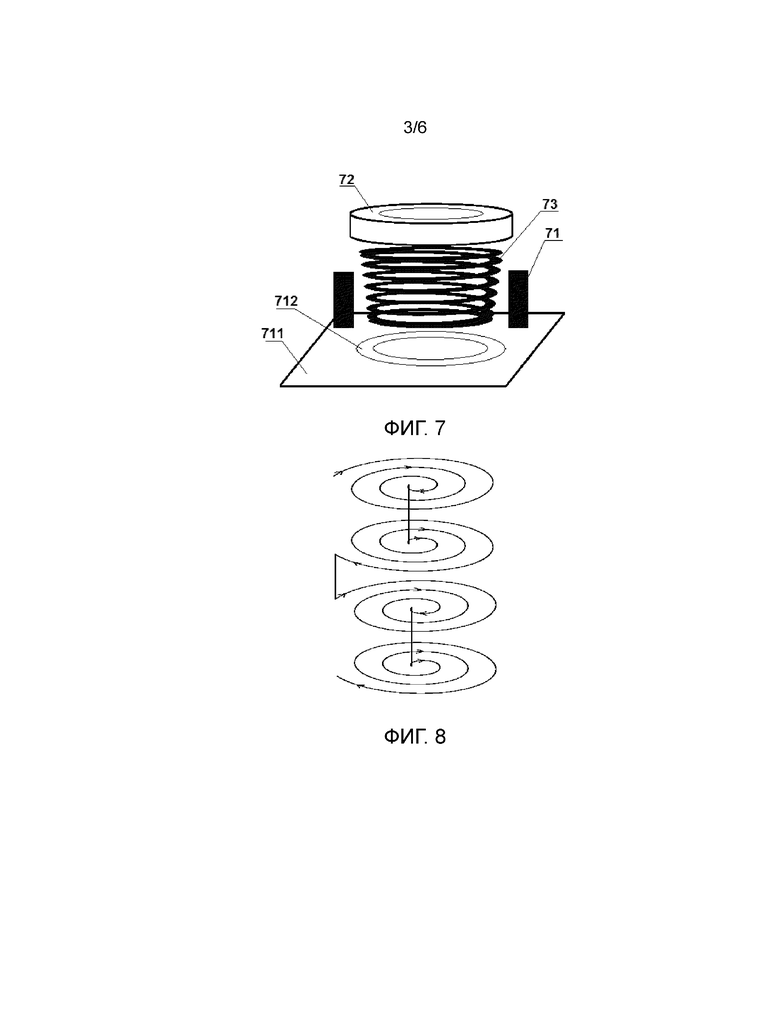
Приводное устройство, изготовленное в соответствии со способами согласно настоящему изобретению, также может представлять собой электродинамический сервопривод, эквивалентная конструкция которого показана на фиг. 7. Электродинамический сервопривод может включать в себя статор 71, подвижный элемент 72 и упругий элемент 73. Подвижный элемент может быть соединен со статором упругим элементом, действующим в качестве деформируемого соединительного элемента. В целом упругий элемент, показанный на фиг. 7, может представлять собой двойную винтовую пружину. На практике также могут быть использованы упругие элементы с другими формами, такими как плоская листовая пружина, изготовленная с помощью процесса травления металла и т.д.
Узлы, описанные выше, включают в себя, по меньшей мере, два магнита, и, по меньшей мере, одну катушку возбуждения. Где:
(1) в отношении двух магнитов - первого магнита, и второго магнита
Как первый магнит, так и второй магнит могут быть постоянным магнитом, а другой может быть постоянным магнитом или приемником магнетизма. Первая естественная сила может включать в себя магнитную силу F2 притяжения или отталкивания между первым магнитом и вторым магнитом. Упомянутый здесь постоянный магнит может относиться к материалу, который имеет магнетизм как таковой, а приемник магнетизма может относиться к материалу, который не имеет магнетизма сам по себе, однако может притягиваться или отталкивается от постоянного магнита, как, например, железо, сталь и другие материалы с высокой проницаемостью. Первый магнит может быть расположен на подвижном элементе и может быть полым. Нагрузки (например, узел фокусирующего объектива или вариообъектива) могут быть установлены на внутренней части первого магнита. Второй магнит может быть расположен на статоре или упругом элементе. Очевидно, что в том случае, когда на ЭЗК не подается питание, между первым магнитом и вторым магнитом уже существует магнитная сила притяжения или отталкивания.
Поскольку подвижный элемент соединен со статором с помощью упругого элемента, силы, воздействующие на упругий элемент, включают в себя силу F1 упругости упругого элемента и магнитную силу F2 между первым магнитом и вторым магнитом. Для простоты в том случае, когда ЭЗК дополнительно включает в себя другие магнитные компоненты, компоненты могут быть эквивалентны частям первого магнита или второго магнита на основе относительного соотношения магнитных компонентов по отношению к статору и подвижному элементу. Конечно, могут также участвовать и другие силы, такие как сила трения, воздействующая на упругий элемент при его перемещении и сила тяжести, вводимая направлением размещения, и т.д. При фактическом определении положения равновесия упругого элемента следует учитывать все силы, воздействующие на упругий элемент. Тем не менее, так как силы, за исключением F1 и F2, являются относительно небольшими и в меньшей степени зависят от изменения положения, далее при обсуждении равновесия сил упругого элемента будут рассматриваться в основном F1 и F2.
Из анализа вышеупомянутого положения x0 равновесия сил видно, что, представляя силу упругости как F1=k1*х (где k1 является коэффициентом силы упругости упругого элемента и х является положением деформации упругого элемента, то есть расстоянием, на которое упругий элемент отклоняется от свободного положения), и представляя магнитную силу как F2=F0+k2*х (где F0 является силой, воздействующей на упругий элемент, создаваемой притяжением или отталкиванием между первым магнитом и вторым магнитом, когда упругий элемент находится в положении свободного равновесия, т.е. положении равновесия, где внешняя сила не действует на упругий элемент, отношение между магнитной силой и положением является сложным и в основном может рассматриваться как относящееся к обратному квадрату расстояния между центрами двух тел, которые притягиваются или отталкиваются друг от друга. Однако согласно теореме Тейлора к любой непрерывной функции в фиксированной точке можно подойти с помощью линейных функций. Таким образом, соотношение между магнитной силой и положением может быть упрощено согласно приведенной выше формуле. Когда связь между магнитной силой и положением выражена с использованием приведенной выше формулы, к2 называют коэффициентом магнитной силы), может быть получено положение х0 равновесия сил упругого элемента под действием F1 и F2:
F0+k2*x0=k1*x0,
x0=F0/(k1-k2),
Очевидно, что F1 противоположно F2 по направлению. Кроме того, когда k1 больше, чем k2, упругий элемент будет поддерживать равновесие с магнитной силой в линейной области и не будет сжат (или вытянут) в нелинейной области. Конечно, также возможно, что упругий элемент будет сжат или вытянут в нелинейной области.
Как видно из вышеприведенного, упругий элемент может поддерживаться в положении х0 равновесия сил в том случае, когда электроэнергия не подается (отсутствует потребление электроэнергии) до тех пор, пока первый магнит, второй магнит и коэффициент силы упругости упругого элемента надлежащим образом расположены в соответствии с соотношением, описанной выше. Когда положение x0 равновесия сил устанавливается на одной из или между двумя конечными точками рабочего диапазона упругого элемента, может быть достигнуто поддержание нулевого потребления электроэнергии в соответствующем рабочем состоянии. Упомянутый здесь рабочий диапазон упругого элемента может относиться к диапазону [xa, хb] перемещения подвижного элемента. Для большинства применений x0 может быть предпочтительно установлен как xa или xb или (xa+xb)/2, что конкретно может быть определено в соответствии с моделью перемещения подвижного элемента. Например, в том случае, когда подвижный элемент находится в положении xa или xb, в большинстве случаев х0 может быть установлен как xa или xb таким образом, что в большинстве случаев потребляемая мощность ЭЗК равна нулю; в том случае, когда подвижный элемент должен циклически выполнять возвратно-поступательное движение в [xa, xb] большую часть времени, х0 может быть установлен как (xa+Xb)/2, при этом максимальное смещение из положения равновесия, вызванное ЭЗК, составляет (xa+Xb) / 2, что сводит к минимуму требуемый ток возбуждения.
Помимо способности поддерживать нулевое значение потребляемой мощности в определенном рабочем положении ЭЗК в соответствии с вариантами осуществления настоящего изобретения может также иметь преимущества во время движения отклонения от положения x0 равновесия сил. Для традиционного ЭЗК существует противоречие в конструкции: коэффициент силы упругости должен быть уменьшен, чтобы уменьшить потребление энергии и повысить скорость движения; однако уменьшение коэффициента силы упругости приведет к увеличению колебаний, при этом положение нагрузок не может быть зафиксировано в течение длительного времени и, таким образом, точность скорости и перемещения уменьшается. В то время как для ЭЗК в соответствии с вариантами осуществления настоящего изобретения из-за существования F2 с помощью катушки возбуждения должна уравновешиваться эквивалентная пружина с коэффициентом силы упругости (k1-k2), когда упругий элемент перемещается вблизи х0. Поэтому в том случае, когда влияние силы тяжести и силы трения не учитывается, с теми же размерами конструкции, чтобы передвинуться на такое же расстояние, отношение тока и потребляемой мощности, требуемое ЭЗК в соответствии с вариантами осуществления настоящего изобретения и традиционным ЭЗК, составляет (k1-k2)/k1; в то время как колебание (или гашение) коэффициента упругого элемента по-прежнему определяется k1. Таким образом, снижается не только потребление энергии, но и обеспечивается точность перемещения.
(2) по отношению к катушке возбуждения
Катушка возбуждения может быть расположена на подвижном элементе, статоре или упругом элементе, с тем условием что, по меньшей мере, один постоянный магнит не будет находиться на одном компоненте с катушкой возбуждения. Экзогенная движущая сила может включать в себя электромагнитную силу, произведенную движущую катушки для привода подвижного элемента для перемещения. Например, в том случае, когда статор включает в себя постоянный магнит, катушка возбуждения может быть расположена на подвижном элементе или упругом элементе. В случае когда подвижный элемент включает в себя постоянный магнит, катушка возбуждения может быть расположена на статоре или упругом элементе. Конечно, катушка возбуждения может быть расположена на обоих компонентах. Например, в том случае, когда подвижный элемент включает в себя постоянный магнит, катушка возбуждения может быть расположена как на статоре, так и на упругом элементе.
Может быть два предпочтительных расположения катушки возбуждения для ЭЗК в соответствии с вариантами осуществления настоящего изобретения:
В соответствии с одной из предпочтительных компоновок катушка возбуждения располагается на упругом элементе, т.е. интегрирована с упругим элементом для образования винтовой пружины. Материалы винтовой пружины включают в себя проводящие материалы. Винтовая пружина действует как катушка, приводящая в действие подвижный элемент для перемещения. Винтовая пружина может быть соединена с цепью через проводящие контакты на конце и быть жестко соединена с подложкой статора. Поскольку пружина обычно изготовлена из стали, проводимость которой не очень хороша, никель, медь, серебро или другие материалы сплавов с хорошей проводимостью могут быть нанесены на внешней поверхности стальной пружины для увеличения проводимости. Кроме того, при функционировании в качестве катушки возбуждения пружина должна быть изолирована на своей поверхности. Поэтому на внешнюю поверхность пружины могут быть нанесены изоляционные материалы. Например, на внешней поверхности пружины может быть нанесена изоляционная краска.
В соответствии с другой компоновкой в качестве катушки возбуждения используется отдельная первая катушка. Первая катушка выполнена из печатной схемы и обычно может располагаться на статоре. Подложка печатной схемы может выступать в качестве подложки статора (как показано на фиг. 7, на которой печатная плата, действующая в качестве подложки 711 статора, снабжена первой катушкой 712). Печатная схема может быть выполнена на твердой плате, например печатной плате (ПП), или же может быть также выполнена на мягкой плате, например гибкой печатной плате (ГПП). Как ПП, так и ГПП может быть снабжена однослойной схемой или же может быть образована из двух или более слоев схемы. Печатная схема может быть изготовлена из электропроводных материалов, например может быть изготовлена из обычной меди или других металлов и их композитов. В некоторых вариантах осуществления печатная схема может быть изготовлена из сверхпроводящих материалов, в результате чего потери меди и нагрев электродвигателя может быть значительно уменьшен, а производительность и надежность электродвигателя может быть увеличена. Например, могут быть использованы недавно предложенные композитные сверхпроводящие материалы графен и станен (предложено профессором Zhang Shoucheng из Стэнфордского университета). Однослойная решетчатая пленка из композитного материала станен, выполненная из композитного сверхпроводящего материала станен, имеет сверхпроводимость при комнатной температуре на своих краях. Использование этой сверхпроводящей пленки при изготовлении ПП или ГПП приведет к получению чрезвычайно высоких характеристик. На основе современных технологий для изготовления печатных плат конструкция печатной платы может быть выполнена в соответствии с заданной конфигурацией катушки и требуемая намотка может быть получена с помощью одного блока (одной ПП или ГПП) или путем наслаивания множества ПП или ГПП (провода, которые расположены на концах и должны быть соединены, могут быть приварены). На фиг. 8 и фиг. 9 показаны две типовые компоновки печатной схемы, на которых стрелками указаны направления токов. Специалист в данной области техники без труда поймет, что компоновка и/или режим наслаивания печатной схемы может быть соответственно разработан в соответствии с конфигурацией, требуемой катушкой. На фиг. 8 показана плоская спиральная намотка, перекрывающаяся в осевом направлении, где провод намотан по спирали в один слой, а затем переходит в другой слой через перфорацию и продолжает наматываться по спирали. Спиральная цепь в каждом слое может представлять собой либо однослойную ПП либо ГПП или же один слой многослойной ПП или ГПП. Слои соединены токопроводящими переходными отверстиями (то же ниже). На фиг. 9 показана слоистая 3D спиральная намотка, вложенная в радиальном направлении, где провод сначала намотан по спирали между различными слоями, а затем трехмерно спирально намотан в направлении изнутри наружу (или снаружи внутрь), что можно рассматривать как гнездовое размещение нескольких вертикальных катушек с разными диаметрами.
Первая катушка может представлять собой концентрическую спиральную кольцевую катушку, как показано на фиг. 7. Эта катушка имеет большое рассеяние магнитного потока и, соответственно, эффективность возбуждения низка. В целях дальнейшего повышения эффективности катушки возбуждения настоящее изобретение дополнительно предлагает предпочтительную катушку - многовитковую цепную кольцевую катушку. Как видно из фиг. 10, первая катушка 1512 образована путем объединения множества небольших спиральных катушек. С помощью катушки, имеющий такую конфигурацию, большая электромагнитная сила может быть сгенерирована с использованием небольшого тока, и, таким образом, потребление энергии ЭЗК может быть дополнительно уменьшено. Маленькие катушки в многовитковой цепной кольцевой катушке могут быть соединены параллельно или последовательно или могут быть соединены параллельно по группам или последовательно по группам. Может быть отдельно достигнуто управления переключением этих маленьких катушек, либо токи с различной величиной и даже разных направлений могут подаваться в эти малые катушки, при этом точное ступенчатое управление может достигаться независимо от точности деления напряжения.
Могут быть смонтированы один или оба из винтовой пружины и первой катушки, выполненной из печатной схемы, описанной выше. В случае когда смонтированы оба из них, используется один из них или оба они используются одновременно, что может конкретно определяться в соответствии с необходимой величиной движущей силы. Например, для ЭЗК с малыми размерами и нагрузками используется только винтовая пружина. Для ЭЗК, который имеет большую нагрузку или требует длительного хода, винтовая пружина сама по себе не может быть в состоянии генерировать достаточно большую электромагнитную силу. Поэтому совместно может быть использована первая катушка.
В том случае, когда статор включает в себя первую позиционирующую втулку, выполненную из постоянных магнитных материалов или магнито-воспринимающих материалов, первая катушка может быть расположена на первой позиционирующей втулке или на нижней части первой позиционирующей втулки. Например, как показано на фиг. 10, первая катушка 1512 может быть выполнена на подложке 1511, которая расположена на нижней части первой позиционирующей втулки 1513. Используя магнетизм или способность к восприятию магнетизма первой позиционирующей втулки, электромагнитная сила, создаваемая первой катушкой, может эффективно передаваться на первый магнит, расположенный на подвижном элементе. Конечно, в случае когда первая катушка используется в сочетании с винтовой пружиной, первая катушка может также быть расположена на нижней части пружины.
Далее ЭЗК в соответствии с настоящим изобретением будет описан со ссылкой на конкретные варианты осуществления, при этом признаки, которые уже были описаны выше (такие как место положения x0 равновесия сил), не будут описываться снова.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 2.1
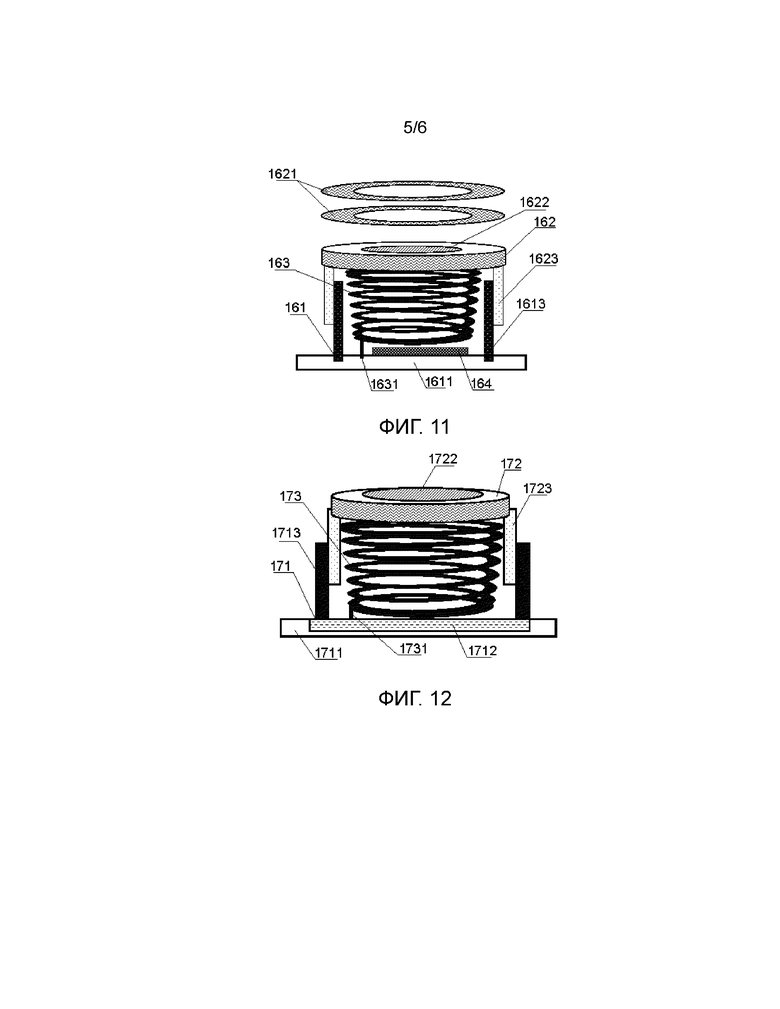
Вариант осуществления ЭЗК в соответствии с настоящим изобретением показан на фиг. 11, который может включать в себя статор 161, подвижный элемент 162 и упругий элемент 163. Подвижный элемент может включать в себя постоянное магнитное кольцо, действующее в качестве первого магнита. Статор может включать в себя первую позиционирующую втулку 1613, выполненную из чугуна или стали, которая действует в качестве второго магнита, и подложку 1611. Эластичный элемент может представлять собой стальную пружину с медным покрытием, на поверхность которой нанесена изоляционная краска. Нижняя часть упругого элемента может быть прикреплена к подложке 1611 и соединена с цепями через штырьки 1613. Верхняя часть упругого элемента может быть связана с постоянным магнитным кольцом подвижного элемента. Поскольку упругий элемент выполнен из стали и самого магнито-воспринимающего материала, это может быть эквивалентным во втором магните и рассматриваться как единое целое с ним при определении положения равновесия сил упругого элемента.
В настоящем варианте осуществления постоянное магнитное кольцо подвижного элемента является полым и в нем может быть установлен узел фокусирующего объектива или вариообъектива. В настоящем варианте осуществления, так как используется винтовая пружина, которая интегрирует катушку и пружину, дополнительные катушки возбуждения не добавлены. Таким образом, данный вариант осуществления изобретения подходит для фокусировки с коротким ходом. Таким образом, в настоящем варианте осуществления используется узел 1622 фокусирующего объектива. Постоянное магнитное кольцо подвижного элемента может быть образовано путем склеивания и наложения множества магнитных кольцевых срезов 1621. В ходе процесса производства срез магнитного кольца добавляют один за другим, пока положение x0 равновесия сил упругого элемента не будет находиться в нужном рабочем положении, например для фокусировки в рабочем положении, в котором объектив сфокусирован на бесконечность. Чтобы лучше зафиксировать узел фокусирующего объектива, подвижный элемент может включать в себя оправу 1623 объектива, которая используется для фиксации магнитного кольца. Оправа объектива может быть выполнена, например, из полимерных материалов, а также может быть надета на внешней стороне первой позиционирующей втулки, чтобы обеспечить стабильность перемещения объектива вдоль осевого направления. Подложка статора может представлять собой ПП или ГПП, на которой могут быть смонтированы чувствительный чип 164 и соответствующая схема. Тем самым может быть получен компактный модуль автоматической фокусировки объектива, управляемый с помощью ЭЗК.
В настоящем варианте осуществления винтовая пружина 163 установлена на внутренней части первой позиционирующей втулки 1613 и генерирует магнитную силу при подаче на нее питания. Первая позиционирующая втулка изготовлена из магнито-воспринимающего материала и притягивается винтовой пружиной. Поскольку наружный диаметр винтовой пружины близок к внутреннему диаметру первой позиционирующей втулки, винтовая пружина будет деформироваться под действием магнитной силы и примыкать к внутренней стенке первой позиционирующей втулки, и тем самым создается трение для увеличения коэффициента затухания пружины таким образом, что пружина может быстро быть стабилизироваться, когда скорректируется положение объектива. Кроме того, тесное примыкание винтовой пружины к первой позиционирующей втулке дополнительно обеспечивает передачу магнитной силы катушки через первую позиционирующую втулку таким образом, что электромагнитная эффективность катушки может дополнительно увеличиться. Конечно, в других вариантах осуществления также возможно, что винтовая пружина будет надета на внешней стороне первой позиционирующей втулки и будет упираться во внешнюю стенку первой позиционирующей втулки при подаче питания.
В настоящем варианте осуществления, так как положение равновесия сил винтовой пружины находится в положении, когда объектив сфокусирован на бесконечность, то на ЭЗК не нужно подавать питание, когда модуль объектива находится в состоянии предварительного просмотра работы. Только тогда, когда фотосъемка или видеосъемка начинается таким образом, что объектив должен выполнить операцию фокусировки, ЭЗК начинает работать и потреблять энергию.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 2.2
Другой вариант осуществления ЭЗК в соответствии с настоящим изобретением показан на фиг. 12, который может включать в себя статор 171, подвижный элемент 172 и упругий элемент 173. Подвижный элемент может включать в себя постоянное магнитное кольцо, действующее в качестве первого магнита. Статор может включать в себя первую позиционирующую втулку 1713, выполненную из чугуна или стали, которая действует в качестве второго магнита, и подложку 1711. Эластичный элемент может представлять собой стальную пружину с медным покрытием, на поверхность которой нанесена с изоляционная краска. Нижняя часть упругого элемента может быть прикреплена к подложке 1711 и соединена со схемами через штырьки 1713. Верхняя часть упругого элемента может быть связана с постоянным магнитным кольцом подвижного элемента. По сравнению с вариантом осуществления 2.1 основное отличие состоит в том, что кроме использования винтовой пружины первая на подложке статора дополнительно предусмотрена катушка 1712, с тем чтобы обеспечить большую движущую силу.
В настоящем варианте осуществления первая катушка может представлять собой многовитковую цепную кольцевую катушку, сделанную из печатной схемы и расположенную на нижней части первой позиционирующей втулки, и может обеспечить большую электромагнитную силу вместе с винтовой пружиной. Таким образом, ЭЗК в соответствии с настоящим вариантом осуществления пригоден для масштабирования, требующего длинного хода. Постоянное магнитное кольцо подвижного элемента является полым, и в нем может быть установлен узел 1722 вариообъектива. Чтобы лучше зафиксировать вариообъектив, подвижный элемент может включать в себя оправу 1723 объектива, которая используется для фиксации магнитного кольца. Оправа объектива может быть выполнена, например, из пластиковых материалов и установлена на внутренней части первой позиционирующей втулки, чтобы обеспечить стабильность перемещения линзы вдоль осевого направления.
В настоящем варианте осуществления положение х0 равновесия сил упругого элемента может являться положением, в котором объектив полностью втянут, или может являться положением, в котором объектив имеет однократное увеличение. В случае когда положение равновесия сил является положением, при котором объектив полностью втянут (например, положение, в котором объектив находится на одном уровне с корпусом), источник питания не требуется и объектив автоматически втягивается, однако соответственно сильный удерживающий ток необходим, когда объектив работает. В случае когда положением равновесия сил является положение, в котором объектив имеет однократное увеличение, потребление электроэнергии возникает только тогда, когда коэффициент масштабирования превышает 1, однако втягивать объектив, возможно, потребуется вручную. Например, на объектив нажимают вручную и используют фиксатор, чтобы удерживать объектив во втянутом положении.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 2.3
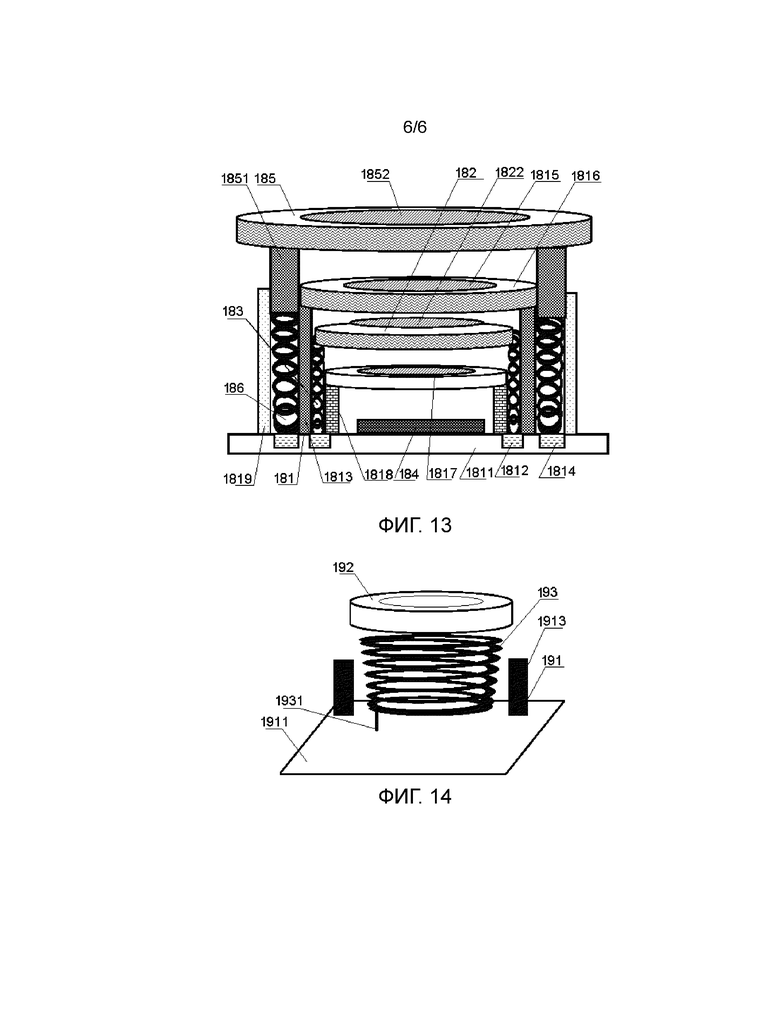
Другой вариант осуществления ЭЗК в соответствии с настоящим изобретением показан на фиг. 13, которая может быть образована путем установки группы статоров, двух групп подвижных элементов и эластичных элементов. Одна группа подвижных элементов и эластичных элементов может быть установлена на внутренней стороне статора, а другая группа может быть установлена на внешней стороне подвижного элемента. В частности, ЭЗК может включать в себя общий статор 181, первый подвижный элемент 182, первый упругий элемент 183, второй подвижный элемент 185 и второй упругий элемент 186. Первый подвижный элемент может включать в себя постоянное магнитное кольцо (которое действует в качестве первого магнита), а второй подвижный элемент может включать в себя постоянное магнитное кольцо и первую оправу 1851 вариообъектива, которая используется для фиксации постоянного магнитного кольца. Первая оправа вариообъектива может быть изготовлена из чугуна или стали и может выступать в качестве первого магнита вместе с постоянным магнитным кольцом второго подвижного элемента. Статор 181 может включать в себя первую позиционирующую втулку 1813, выполненную из чугуна или стали, которая действует в качестве второго магнита, подложку 1811 ПП или ГПП и две группы первой катушки 1812 и 1814, которые расположены на нижней части двух упругих элементов, соответственно. Две группы катушек обе могут являться многовитковыми цепными кольцевыми катушками, изготовленными из печатной схемы. Как первый упругий элемент, так и второй упругий элемент могут представлять собой стальные пружины с медным покрытием, на поверхности которых может быть нанесена изоляционная краска, и их нижние части могут быть закреплены на подложке 1811 и соединены со схемами через штырьки (не показаны). Верхняя часть первого упругого элемента может быть связана с постоянным магнитным кольцом первого подвижного элемента. Верхняя часть второго упругого элемента может приводить в действие постоянное магнитное кольцо второго подвижного элемента путем. В других вариантах осуществления конфигурацию катушки возбуждения можно регулировать в соответствии с требуемой движущей силой. Например, первый упругий элемент может просто быть пружиной или первый упругий элемент представляет собой винтовую пружину, в то время как катушка 1812 возбуждения, расположенная на его нижней части, аннулируется и т.д.
В настоящем варианте осуществления постоянное магнитное кольцо первого подвижного элемента может быть полым и в нем может быть установлен первый узел 1822 фокусирующего объектива. Постоянное магнитное кольцо второго подвижного элемента может быть полым, и первый узел 1822 фокусирующего объектива. Для достижения лучшей оптической конструкции фиксированный второй узел 1815 вариообъектива может быть дополнительно предусмотрен между первым узлом 1822 фокусирующего объектива и первым узлом 1852 вариообъектива. Второй узел 1815 вариообъектива может быть установлен на первой позиционирующей втулке с помощью полого магнитного кольца 1816, которое может быть эквивалентно части второго магнита. И второй узел 1817 фокусирующего объектива может быть предусмотрен на внутренней стороне первого узла 1822 фокусирующего объектива и закреплен на подложке 1811 с помощью второй позиционирующей втулки 1818, которая может быть изготовлена из пластических материалов. Для защиты винтовой пружины, действующей в качестве второго упругого элемента, защитная оправа 1819 объектива, закрепленная на подложке, дополнительно может быть предусмотрена снаружи первой оправы вариообъектива. Защитная оправа объектива может быть изготовлена из пластиковых материалов.
Используя вышеописанную конструкцию с последующей установкой чувствительного чипа 184 и соответствующей схемы на подложке, можно получить очень компактный узел в сборе вариообъектива с приводом от ЭЗК. Внутренняя стенка первой позиционирующего втулки упирается в первый упругий элемент, приводя в действие первый фокусирующий объектив, и наружная стенка упирается во второй упругий элемент, приводя в действие первый вариообъектив, таким образом, конструкция упрощается и миниатюризируется и имеет как свойства масштабирования, так и фокусировки. Вся конструкция проста и не требует трудного этапа механической обработки.
Положение равновесия сил первого упругого элемента и второго упругого элемента может быть определено в соответствии с магнитной силой, предварительно приложенной к ним, и положением равновесия своей собственной силы упругости и может быть установлено в качестве нужного рабочего положения соответственно. Например, положение равновесия сил первого упругого элемента может быть установлено в качестве рабочего положения объектива в состоянии обзора, а положение равновесия сил первого упругого элемента может быть установлено как положение объектива при однократном увеличении.
В других вариантах осуществления, в случае если оптический дизайн прост, фиксированный второй узел вариообъектива и второй узел фокусирующего объектива могут быть опущены, таким образом, конструкции, описанные выше, упрощаются дополнительно.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ 2.4
Другой вариант осуществления ЭЗК в соответствии с настоящим изобретением показан на фиг. 14, который может включать в себя статор 191, подвижный элемент 192 и упругий элемент 193. Подвижный элемент может соединяться с подвижным элементом через упругий элемент. Подвижный элемент может включать в себя постоянное магнитное кольцо, действующее в качестве первого магнита. Эластичный элемент может представлять собой магнитную винтовую пружину, в которую входят катушка, пружина и магнит. Материалы магнитной винтовой пружины могут включать в себя проводящие материалы для работы в качестве катушки, которая приводит в действие подвижный элемент для перемещения. Материалы магнитной винтовой пружины могут также включать в себя постоянные магнитные материалы или магнито-воспринимающие материалы для работы в качестве второго магнита. Например, магнитная винтовая пружина может представлять собой стальную пружину с медным покрытием, на поверхность которой может быть нанесена изоляционная краска. Нижняя часть магнитной винтовой пружины может быть закреплена на подложке 1911 и соединена со схемой через штырьки 1931. Верхняя часть магнитной винтовой пружины может быть связана с постоянным магнитным кольцом подвижного элемента.
В настоящем варианте осуществления, так как упругий элемент выступает в качестве катушки возбуждения, пружины и второго магнита одновременно, статор может быть изготовлен из немагнитных материалов. Например, статор может включать в себя подложку 1911 ПП и пластиковую оправу 1913, закрепленную на подложке.
В других вариантах осуществления, чтобы улучшить свойства электромагнитного возбуждения и увеличить приложенную ранее магнитную силу, может быть предусмотрена позиционирующая втулка, изготовленная из постоянных магнитных материалов или магнито-воспринимающих материалов, или же может быть добавлена катушка возбуждения, и т.д.
Выше были описаны со ссылкой на конкретные примеры принципы и варианты осуществления настоящего изобретения. Тем не менее, следует понимать, что варианты осуществления, описанные выше, используются просто для облегчения понимания настоящего изобретения, однако их не следует интерпретировать как ограничивающие его. Различные модификации конкретных вариантов осуществления, описанных выше, могут быть сделаны обычным специалистом в данной области техники согласно концепции настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУМ-ОБЪЕКТИВ | 2014 |
|
RU2648006C1 |
| Устройство для измерения линейных размеров образцов материалов | 1987 |
|
SU1696844A1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ МАССЫ В НЕВЕСОМОСТИ | 2012 |
|
RU2488784C1 |
| Электромагнитный исполнительный механизм и устройство сохранения сил инерции для поршневого компрессора | 2013 |
|
RU2635755C2 |
| ОПТИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО И ОПТИЧЕСКИЙ ПРОИГРЫВАТЕЛЬ, СОДЕРЖАЩИЙ ОПТИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2271579C2 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| Электродинамический сервопривод и фокусирующий объектив | 2014 |
|
RU2642450C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТЕВИДНОГО МАТЕРИАЛА | 2015 |
|
RU2602616C2 |



Изобретение относится к области электротехники, в частности к приводному устройству. Технический результат – повышение эффективности. Приводное устройство содержит статор, ротор и деформируемый соединительный элемент. Ротор соединен со статором через деформируемый соединительный элемент. Внешняя движущая сила приводит в действие деформируемый соединительный элемент, причём деформация происходит так, что ротор меняет свое положение по отношению к статору. При условии что не применяется никакая внешняя движущая сила, деформируемый соединительный элемент остается в положении (x0) равновесия сил. Сила на деформируемом соединительном элементе включает в себя силу (F1) деформации деформируемого соединительного элемента и первую естественную силу (F2) в направлении, противоположном направлению силы (F1) деформации. 2 н. и 16 з.п. ф-лы, 14 ил.
1. Приводное устройство, содержащее статор (21), подвижный элемент (22) и деформируемый соединительный элемент (23), причем подвижный элемент соединен со статором через деформируемый соединительный элемент и экзогенная движущая сила приводит в действие подвижный элемент или деформируемый соединительный элемент для деформирования таким образом, что положение подвижного элемента относительно статора изменяется, при этом:
в отсутствие приложенной экзогенной движущей силы деформируемый соединительный элемент удерживается в положении (x0) равновесия сил, и силы, воздействующие на деформируемый соединительный элемент, содержат силу (F1) деформации деформируемого соединительного элемента и первую естественную силу (F2), которая противоположна направлению силы деформации,
при этом положение (х0) равновесия сил находится на одной из или между двумя конечными точками рабочего диапазона деформируемого соединительного элемента.
2. Устройство по п. 1, в котором
подвижный элемент содержит первый магнит, статор содержит второй магнит, причем один из первого и второго магнита является постоянным магнитом, а другой представляет собой постоянный магнит или приемник магнетизма, при этом первая естественная сила включает в себя магнитную силу притяжения или отталкивания между первым магнитом и вторым магнитом;
подвижный элемент или статор дополнительно содержит первую катушку, а экзогенная движущая сила включает в себя электромагнитную силу, генерированную первой катушкой, которую используют для приведения в действие подвижного элемента для перемещения; и/или
деформируемый соединительный элемент представляет собой винтовую пружину, причем материалы винтовой пружины содержат проводящие материалы для функционирования в качестве катушки, которая приводит в действие подвижный элемент для перемещения, и экзогенная движущая сила включает в себя электромагнитную силу, генерированную винтовой пружиной, которая используется для приведения в действие подвижного элемента для перемещения.
3. Устройство по п. 2, в котором первый магнит является постоянным магнитом, второй магнит представляет собой первую позиционирующую втулку, выполненную из постоянных магнитных материалов или магнито-воспринимающих материалов, а подвижный элемент установлен внутри или снаружи первой позиционирующей втулки.
4. Устройство по п. 3, в котором винтовая пружина установлена внутри или снаружи первой позиционирующей втулки и примыкает к внутренней стенке или наружной стенке первой позиционирующей втулки под воздействием магнитной силы, когда на нее подается электроэнергия для увеличения коэффициента затухания пружины.
5. Устройство по п. 3, в котором предусмотрены два подвижных элемента и два деформируемых соединительных элемента, причем первый подвижный элемент и первый деформируемый соединительный элемент установлены на внутренней стороне первой позиционирующей втулки, а второй подвижный элемент и второй деформируемый соединительный элемент установлены снаружи первой позиционирующей втулки.
6. Устройство по п. 2, в котором первый магнит выполнен полым, а узел фокусирующего объектива или вариообъектива установлен на внутренней части первого магнита.
7. Устройство по п. 1, в котором статор или подвижный элемент содержит первый магнит, причем первый магнит представляет собой постоянный магнит, деформируемый соединительный элемент представляет собой магнитную винтовую пружину, материалы магнитной винтовой пружины содержат проводящие материалы и постоянные магнитные или магнито-воспринимающие материалы и постоянные магнитные или магнито-воспринимающие материалы магнитной винтовой пружины используются для функционирования в качестве второго магнита;
первая естественная сила содержит магнитную силу притяжения или отталкивания между первым магнитом и вторым магнитом; и
проводящие материалы магнитной винтовой пружины используют, чтобы действовать в качестве катушки, которая приводит в действие подвижный элемент для перемещения, и экзогенная движущая сила содержит электромагнитную силу, которая генерируется с помощью магнитной винтовой пружины и используется для приведения в действие подвижного элемента для перемещения; или проводящие материалы магнитной винтовой пружины используют, чтобы действовать в качестве катушки, которая приводит в действие подвижный элемент для перемещения, подвижный элемент или статор дополнительно содержит первую катушку, а экзогенная движущая сила включает в себя электромагнитные силы, которые генерируются первой катушкой и магнитной винтовой пружиной и используются для приведения в действие подвижного элемента для перемещения.
8. Устройство по п. 1, в котором подвижный элемент содержит первый магнит, первый магнит представляет собой постоянный магнит, деформируемый соединительный элемент представляет собой винтовую пружину, а материалы винтовой пружины содержат проводящие материалы, которые используются, чтобы действовать в качестве катушки, приводящей в действие подвижный элемент для перемещения;
экзогенная движущая сила включает в себя электромагнитную силу, которая создается винтовой пружиной и используется для привода в действие подвижного элемента для перемещения; и
первый магнит расположен на криволинейном наклонном участке и первая естественная сила содержит составляющую силы тяжести первого магнита в направлении, противоположном направлению силы упругости винтовой пружины.
9. Устройство по п. 1, в котором подвижный элемент содержит первый магнит, причем первый магнит является постоянным магнитом;
деформируемый соединительный элемент представляет собой пружину или винтовую пружину и материалы винтовой пружины содержат проводящие материалы, которые используются, чтобы действовать в качестве катушки возбуждения;
подвижный элемент используется, чтобы действовать в качестве подвижного элемента генератора или для привода подвижного элемента генератора и экзогенная движущая сила содержит внешнюю силу, воздействующую на подвижный элемент; и
первый магнит расположен на криволинейном наклонном участке, и первая естественная сила содержит составляющую силы тяжести первого магнита в направлении, противоположном направлению силы упругости винтовой пружины.
10. Устройство по п. 1, в котором статор и подвижный элемент содержат первый электрод и второй электрод, которые имеют электрические заряды с противоположной или одинаковой полярностью, соответственно, деформируемый соединительный элемент представляет собой листовую пружину, первая естественная сила включает в себя электростатическую силу притяжения или силу отталкивания между первым электродом и вторым электродом, между статором и подвижным элементом дополнительно предусмотрена пьезоэлектрическая керамика или металл с памятью, и экзогенная движущая сила включает в себя силу деформации, создаваемую пьезоэлектрической керамической или металлом с памятью после подачи на них питания.
11. Устройство по любому из пп. 1-10, в котором в положении (х0) равновесия сил, коэффициент (k1) вариации силы деформации больше, чем коэффициент (k2) вариации первой естественной силы.
12. Устройство по любому из пп. 1-10, в котором
первая естественная сила содержит магнитную силу, силу тяжести, силу деформации, создаваемую заданной деформацией, давление текучей среды или газа или силу электрического поля; и
экзогенная движущая сила включает в себя электромагнитную силу, электрогенерирующую механическую силу или передающую механическую силу.
13. Устройство по п. 10, в котором листовая пружина выполнена из материалов с высокой диэлектрической проницаемостью и имеет изоляционное покрытие на ее внешней поверхности или интегрирована с пьезоэлектрической керамикой или металлом с памятью.
14. Способ изготовления устройства, включающий в себя изготовление статора, подвижного элемента и деформируемого соединительного элемента, в котором подвижный элемент соединен со статором через деформируемый соединительный элемент, причем
перед приложением экзогенной движущей силы прикладывают первую естественную силу к деформируемому соединительному элементу таким образом, что деформируемый соединительный элемент удерживается в положении (x0) равновесия сил под воздействием силы деформации самого деформируемого соединительного элемента и первой естественной силы, противоположной по направлению силе деформации, при этом экзогенную движущую силу используют для приведения в действие подвижного элемента или деформируемого соединительного элемента для такого деформирования, чтобы положение подвижного элемента относительно статора изменилось,
при этом положение (х0) равновесия сил находится на одной из или между двумя конечными точками рабочего диапазона деформируемого соединительного элемента.
15. Способ по п. 14, в котором в положении (х0) равновесия сил коэффициент (k1) вариации силы деформации больше, чем коэффициент (k2) вариации первой естественной силы.
16. Способ по любому из пп. 14,15, представляющий собой способ изготовления управляемого устройства, при этом экзогенная движущая сила действует в качестве входного сигнала управления, а деформация деформируемого соединительного элемента или эффекты, вызванные деформацией, действуют как выходной сигнал или управляемые переменные состояния.
17. Способ по п. 16, представляющий собой способ изготовления вариообъектива, при этом статор и подвижный элемент содержат первый электрод и второй электрод, которые имеют электрические заряды с противоположной или одинаковой полярностью, соответственно, деформируемый соединительный элемент представляет собой листовую пружину, первая естественная сила включает в себя электростатическую силу притяжения или силу отталкивания между первым электродом и вторым электродом, между статором и подвижным элементом дополнительно размещена пьезоэлектрическая керамика или металл с памятью, экзогенная движущая сила включает в себя силу деформации, создаваемую пьезоэлектрической керамикой или металлом с памятью после подачи на них питания и подвижный элемент является полым, а узел фокусирующего объектива или вариообъектива установлен на внутренней части подвижного элемента.
18. Способ по п. 16, представляющий собой способ изготовления генератора естественной энергии, при этом
подвижный элемент содержит первый магнит и первый магнит является постоянным магнитом;
деформируемый соединительный элемент представляет собой пружину или винтовую пружину и материалы винтовой пружины содержат проводящие материалы, которые используются для работы в качестве катушки возбуждения;
подвижный элемент используется для работы в качестве подвижного элемента генератора или для приведения в действие подвижного элемента генератора, экзогенная движущая сила содержит внешнюю силу, воздействующую на подвижный элемент, и внешнюю силу получают из естественной энергии; и
первый магнит расположен на криволинейном наклонном участке и первая естественная сила содержит составляющую силы тяжести первого магнита в направлении, противоположном направлению силы упругости винтовой пружины.
| CN 102088235 A, 08.06.2011 | |||
| EP 1450471 A1, 25.08.2004 | |||
| WO 2008064754 A2, 05.06.2008 | |||
| US 2011133578 A1, 09.06.2011 | |||
| Способ коррекции апертурных искажений | 1952 |
|
SU105090A2 |

