Области техники, к которым относится изобретение
Предлагаемое изобретение может быть использовано в различных отраслях промышленности, где необходимо регулировать два взаимовлияющих параметра с помощью двух входящих в его состав регулирующих устройств, в частности в ракетно-космической технике для регулирования тяги и соотношения компонентов топлива ЖРД.
Уровень техники
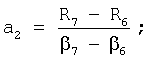
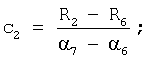
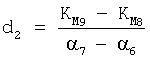
Известен способ регулирования ЖРД по патенту РФ № 2085755 (заявка № 93032897/6 032131 от 23.06.93 г.), предусматривающий измерение расходов окислителя и горючего, которые выполняют на одном огневом испытании двигателя, при этом между первыми двумя измерениями перестраивают один из его регулирующих органов на заранее выбранный угол, а между вторым и третьим измерениями - его другой регулирующий орган также на заранее выбранный угол, и по результатам измерений вычисляют коэффициенты, характеризующие изменение массовых секундных расходов компонентов топлива от поворота каждого из регулирующих органов на единичный угол, а на последующих запусках двигателя регулируют его тягу и соотношение компонентов топлива путем поднастройки его регулирующих органов на углы, величины которых определяют по следующим уравнениям:

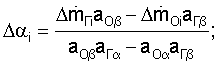
где Δβi, Δαi, - углы коррекции регулятора тяги и дросселя соотношения компонентов топлива соответственно;
 ,
,  - сигналы рассогласования;
- сигналы рассогласования;
аOβ, aГβ - коэффициенты, характеризующие изменение расхода окислителя и горючего от поворота на единичный угол регулятора тяги;
аОα, аГα - коэффициенты, характеризующие изменение этих же параметров от поворота на единичный угол дросселя соотношения компонентов топлива.
Этот способ принят за прототип, поскольку он является наиболее совершенным из известных и не требует непосредственного измерения давления в камере сгорания двигателя при регулировании его тяги. Однако к его недостатку следует отнести два обстоятельства: во-первых, он предусматривает настройку двигателя на одном каком-либо режиме его работы по уровню тяги и соотношению компонентов топлива. Если при работе двигателя в составе ракетоносителя его тяга изменяется в широком диапазоне, например при его плавном дросселировании (до 50...40% от номинального значения), осуществляемом перед выключением двигателя, то известный способ не обеспечивает необходимой точности регулирования, так как коэффициенты аOβ, aГβ зависят от уровня тяги. Во-вторых, усложнен расчет углов коррекции регулирующих органов двигателя из-за того, что в качестве настроечных параметров приняты массовые секундные расходы окислителя и горючего.
Сущность изобретения
Задача, поставленная перед создателями данного изобретения, заключалась в разработке таких средств, решаемых на базе современной вычислительной техники, которые позволили бы регулировать два взаимовлияющих параметра изделия в широком диапазоне и с возможно высокой точностью. При этом предполагалось, что в процессе штатной эксплуатации изделия значения регулируемых параметров можно было бы заранее программировать, а после корректировать в зависимости от конкретных условий его работы. Вторая задача, поставленная перед авторами, заключалась в том, чтобы получение данных для такого регулирования не выходило бы за пределы обычных проверочных испытаний изделий, проводимых после их изготовления, и не сказывалось бы на увеличении их стоимости.
Поставленная цель достигается тем, что в способе настройки изделия, в частности ЖРД, на режим работы, определяемый заданными значениями двух его взаимовлияющих настроечных параметров, каждый из которых преимущественно регулируют одним из двух регулирующих устройств, заключающийся в том, что после вывода изделия на предполагаемый режим проводят первое измерение его параметров, а затем поочередно перестраивают регулирующие устройства в заранее выбранные положения и возвращают их в исходное состояние, и после каждой перестройки вновь измеряют эти параметры, а затем вычисляют коэффициенты передачи регулирующих устройств, характеризующие изменение параметров от перестройки каждого из них на величину, принятую за единицу рабочего диапазона, используя которые определяют значения корректирующих воздействий регулирующих устройств для настройки изделия на заданный режим работы по соотношениям, полученным из уравнений суммарного приращения каждого из настроечных параметров при одновременном воздействии на них регулирующих устройств, проверочные испытания изделия после его изготовления проводят не менее чем на трех режимах с разными значениями первого настроечного параметра, принятого за приоритетный, и на каждом режиме сначала устанавливают регулирующие устройства в положения, определяемые расчетным путем по соответствующим характеристикам этих устройств и других агрегатов изделия, влияющих на значения настроечных параметров, а затем выполняют вышеуказанные процедуры измерения параметров изделия, перестройки его регулирующих устройств в заранее выбранные положения, вычисления их коэффициентов передачи и корректирующих воздействий, после чего настраивают изделие на заданное значение первого настроечного параметра и на одно и то же для всех режимов значение второго настроечного параметра и фиксируют значения скорректированных положений регулирующих устройств, а также коэффициентов, учитывающих влияние на них второго настроечного параметра для конкретного режима работы изделия, а после проведения испытания устанавливают зависимости положений регулирующих устройств и этих коэффициентов от значений первого настроечного параметра в виде полиномов n-ной степени, постоянные коэффициенты которых являются индивидуальными константами настройки данного конкретного изделия и определяют их по дискретным значениям скорректированных положений регулирующих устройств и соответственно коэффициентов, учитывающих влияние на них второго настроечного параметра, зафиксированным на проверочном испытании.
Для ЖРД настроечными параметрами являются его относительный уровень тяги и коэффициент соотношения компонентов топлива, а измеряемыми параметрами - массовые секундные расходы окислителя и горючего, при этом относительный уровень тяги определяют как отношение суммы массовых секундных расходов окислителя и горючего на каком-либо режиме работы двигателя к сумме этих же параметров на его 100%-ном режиме работы при номинальном соотношении компонентов топлива.
Следует отметить, что вышеперечисленная совокупность признаков может иметь самостоятельное применение в тех случаях, когда необходимо настраивать изделия на те режимы работы, которые будут воспроизводиться в процессе его штатной эксплуатации без корректировки настроечных параметров. Для задания требуемых режимов регулирующие устройства устанавливают в скорректированные положения.
В способе регулирования параметров изделия, в частности ЖРД, требуемые значения параметров предлагается получать путем одновременной перестройки его регулирующих устройств в положения, определяемые по их полиномиальным зависимостям от значений первого настроечного параметра с учетом поправок, вводимых в случае отклонения текущего значения второго настроечного параметра от того значения, на которое настраивалось изделие в процессе проверочного испытания, и эквивалентных произведению величины этого отклонения на коэффициенты, учитывающие соответственно влияние второго настроечного параметра на положения регулирующих устройств, также выраженных в виде полиномиальных зависимостей от значений первого настроечного параметра, причем в качестве постоянных коэффициентов этих полиномиальных зависимостей используют соответствующие индивидуальные константы настройки данного изделия, полученные по результатам его проверочного испытания. Другими словами, предлагается математическая модель регулирования, предусматривающая перестройку регулирующих устройств изделия по одновременно выдаваемым на них командам в соответствии со следующими уравнениями:

где β, α - текущие значения положений первого и второго регулирующих устройств соответственно;
R, К - текущие значения первого и второго настроечных параметров;
Kном - значение второго настроечного параметра, принятое за номинал, на которое настраивалось изделие при проведении проверочного испытания;



- индивидуальные константы изделия, являющиеся постоянными коэффициентами полиномов n-ной степени, которыми описываются зависимости положений его регулирующих устройств от уровня первого настроечного параметра, а также коэффициентов, учитывающих влияние на них второго параметра для конкретного режима работы изделия.
Следует отметить, что текущие значения его первого и второго настроечных параметров формируют в виде задания их реализации в функции времени и предусматривают их коррекцию в зависимости от реальных условий работы изделия.
Перечень фигур чертежей
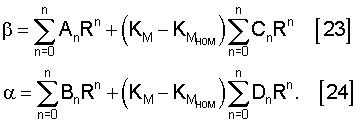
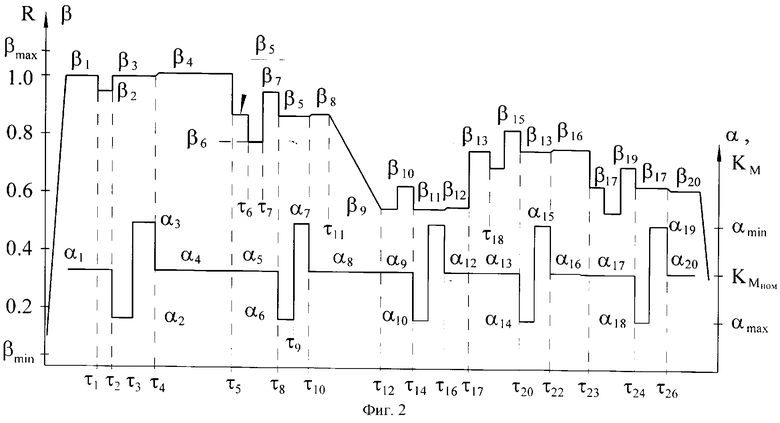
Сущность предлагаемых способов рассматривается на примере настройки и регулирования параметров ЖРД, функциональная схема которого с основными элементами испытательного стенда приведена на фиг.1. На фиг.2 и 3 показаны графики изменения уровня тяги, коэффициента Кm и положений регулирующих устройств двигателя в процессе его настройки и при работе в составе ракетоносителя соответственно, и на фиг.4 - структурная схема алгоритма настройки двигателя на первом режиме его проверочного испытания.
Сведения, подтверждающие возможность осуществления изобретения
Двигатель 1, выполненный по закрытой схеме, имеет следующие основные агрегаты (фигура 1): камеру 2 сгорания, турбину 3, насос 4 и клапан 5 окислителя, газогенератор 6, регулятор 7 расхода горючего в газогенератор с приводом 8 (регулятор тяги), насосы I-ой (9) и II-ой (10) ступеней горючего, клапан 11 горючего и дроссель 12 горючего с приводом 13. Из стендовых элементов на фигуре 1 показаны топливные емкости 14 и 15, датчики температуры 16, 17 окислителя и горючего соответственно, турбинные преобразователи расхода (ТПР) 18 и 19, смонтированные в стендовых питающих магистралях, и устройство 20 управления, включающее вычислитель 21, блоки 22, 23 измерения температуры и расходов компонентов топлива соответственно, блок 24 памяти, формирователь 25 управляющих команд и регистратор 26.
Для управления регулятором 7 и дросселем 12 используются, например, цифровые гидравлические приводы 8 и 13, у которых управляющие команды представляют собой 7-разрядный параллельный двоичный код, однозначно определяющий положение выходного вала привода. В этом случае формирователь 25 преобразует логические сигналы «0» и «1» каждого из разрядов в рабочие напряжения ±27 В, транслируемые на управляющие обмотки приводов.
На структурной схеме алгоритма настройки (фиг.4) операции измерения, вычисления, управления и записи в блок памяти 24 или в регистратор 26 обозначены соответственно индексами И, В, У, З.
Сущность предлагаемого способа настройки двигателя 1 состоит в следующем.
Первое испытание каждого вновь собранного двигателя проводят на стенде для проверки его работоспособности, подтверждения его характеристик требованиям конструкторской документации и получения данных, необходимых для расчета индивидуальных констант двигателя. Программой испытания предусматривают, например, пять режимов его работы на разных уровнях тяги (фиг.2), причем начальные углы β1, α1; β5, α5, ...β17, α17 регулятора 7 и дросселя 12 для каждого из этих режимов определяют расчетным путем по соответствующим характеристикам агрегатов, входящих в состав двигателя (по мощностным и напорным характеристикам его насосов 4, 9, 10, характеристикам турбины 3, проливочным данным камеры сгорания 2, газогенератора 6, регулятора 7, дросселя 12 и т.д.). Значения этих углов, программы всех вычислительных операций и другие исходные данные, необходимые для настройки двигателя, загружают в блок памяти 24.
После вывода двигателя на первый расчетный режим, например, близкий к номинальному по уровню тяги (R=1), и стабилизации его параметров проводят 1-ое измерение объемных расходов компонентов топлива (момент времени τ1 на графике фиг.2), используя для этого показания расходомеров 18 и 19. Блок 23 преобразует частотные сигналы, формируемые на их выходах, в секундные объемные расходы окислителя  и горючего
и горючего  по проливочным характеристикам ТПР вида
по проливочным характеристикам ТПР вида

где 
 - значения частотных сигналов, формируемых ТПР 18 и 19;
- значения частотных сигналов, формируемых ТПР 18 и 19;



 - постоянные (аппроксимирующие) коэффициенты.
- постоянные (аппроксимирующие) коэффициенты.
Показания датчиков температуры 16 и 17 преобразуются блоком 22 в физические размерности параметров по их градуировочным характеристикам, а вычислитель 21 определяет массовые секундные расходы окислителя  и горючего
и горючего  :
:

где 
 - значения плотностей окислителя и горючего, соответствующие измеренной температуре, считанные из блока памяти 24.
- значения плотностей окислителя и горючего, соответствующие измеренной температуре, считанные из блока памяти 24.
Затем следуют вычисления коэффициента  соотношения компонентов топлива на этом (первом) режиме, их суммарного расхода
соотношения компонентов топлива на этом (первом) режиме, их суммарного расхода  и фактического уровеня тяги R1, на который выведен двигатель:
и фактического уровеня тяги R1, на который выведен двигатель:



где  - номинальный суммарный расход компонентов топлива на 100% - ном режиме тяги.
- номинальный суммарный расход компонентов топлива на 100% - ном режиме тяги.
Вычисленные значения  и R1 записывают в память блока 24 для их использования в последующих расчетах.
и R1 записывают в память блока 24 для их использования в последующих расчетах.
По окончании последней операции регулятор 7 тяги перестраивают в сторону дросселирования на угол β2, равный разности угла β1, и заранее выбранной уставки Δβзад на изменение уровня тяги, то есть
Возможна перестройка регулятора тяги в сторону форсирования двигателя, если этот режим не выходит за пределы его рабочего диапазона.
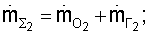
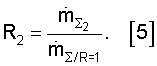
После стабилизации параметров двигателя на новом режиме (момент времени τ2) проводят 2-ое измерение массовых расходов окислителя и горючего (обозначены индексами  и
и  в вышеуказанной последовательности и вычисляют коэффициент
в вышеуказанной последовательности и вычисляют коэффициент  соотношения компонентов и уровень тяги R2:
соотношения компонентов и уровень тяги R2:
Полученные данные используют для вычисления коэффициентов a1, b1 передачи регулятора 7 тяги, учитывающих его влияние на изменение уровня тяги и коэффициента соотношения компонентов топлива для режима работы двигателя, близкого к 1-му настроечному:


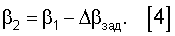
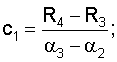
Значения вычисленных коэффициентов а1, b1, считывают в блок памяти 24, после чего регулятор тяги возвращают на расчетный угол β1(β3=β1), а дроссель 12, посредством которого регулируют соотношение компонентов в камере сгорания, устанавливают на угол α2=α1+Δαзад, причем величину угла Δαзад перестройки дросселя выбирают заранее. После стабилизации параметров двигателя (момент времени τ3) производят 3-е измерение массовых расходов компонентов топлива  с последующим вычислением коэффициента
с последующим вычислением коэффициента  и уровня тяги R3:
и уровня тяги R3:



Четвертое измерение массовых расходов окислителя и горючего  проводят после перестройки дросселя 12 на угол α3=α2-2Δαзад (момент времени τ4). Коэффициент
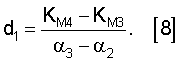
проводят после перестройки дросселя 12 на угол α3=α2-2Δαзад (момент времени τ4). Коэффициент  соотношения компонентов и относительный уровень тяги R4 определяют аналогично описанному выше. После этого вычисляют вторую пару коэффициентов передачи c1, d1, характеризующих изменение уровня тяги и коэффициента соотношения компонентов от перестройки дросселя 12 на единичный угол:
соотношения компонентов и относительный уровень тяги R4 определяют аналогично описанному выше. После этого вычисляют вторую пару коэффициентов передачи c1, d1, характеризующих изменение уровня тяги и коэффициента соотношения компонентов от перестройки дросселя 12 на единичный угол:
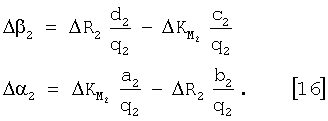
Полученные коэффициенты передачи используют для поднастройки двигателя на 1-ый заданный режим. Причем углы коррекции Δβ1, Δα1 регулирующих устройств вычисляют по соотношениям, которые выведены из уравнений суммарного приращения коэффициента КМ и уровня тяги R, а именно:
перестройка любого из регулирующих устройств двигателя вызывает изменение как уровня тяги, так и коэффициента соотношения компонентов топлива. Данное условие может быть записано следующими двумя уравнениями (при одновременной коррекции регулятора тяги и дросселя горючего):

где ΔR и ΔКМ - суммарные изменения уровня тяги и коэффициента соотношения компонентов от перестройки регулятора тяги и дросселя горючего на углы Δβ и Δα соответственно.
Решая эту систему уравнений относительно углов Δβ и Δα, получаем:
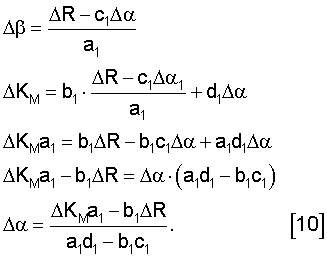
Аналогично для Δβ:
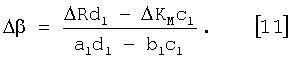
Соотношения [10] и [11] можно переписать следующим образом:

Обозначим: a1d1-b1c1=g1.
Тогда
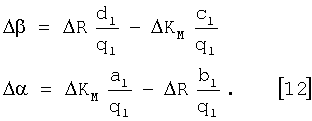
Новые углы, на которые устанавливают регулятор тяги и дроссель горючего по окончании вышеуказанных вычислений для обеспечения R=1,0 при  , будут равны:
, будут равны:



Значения скорректированных углов β4, α4, а также коэффициентов  и
и  фиксируют в регистраторе 26. Они будут использованы для вычисления индивидуальных констант двигателя.
фиксируют в регистраторе 26. Они будут использованы для вычисления индивидуальных констант двигателя.
В момент времени τ5 двигатель переводят на режим с уровнем тяги, близким, например, 83% от Rном, устанавливая регулятор 7 на расчетный угол β5. На этом режиме производят пять измерений массовых расходов компонентов топлива соответственно в моменты времени τ6, τ7, ..., τ10, то есть на каждом из вспомогательных режимов, определяемых настройкой регулирующих устройств на углы β6, β7, α6, α7, где β6=β5-Δβзад, β7=β6+2Δβзад,
α6=α5+Δαзад и α7=α6-2Δαзад.
По результатам измерений вычисляют коэффициенты передачи и углы β8, α8 точной настройки двигателя на уровень тяги R=0,83 при 




Из этого массива данных для последующего вычисления индивидуальных констант двигателя будут использованы значения углов β8, α8 и коэффициентов 
 учитывающих влияние второго настроечного параметра на положения регулятора 7 и дросселя 12 горючего при R=0,83 Rном. Эти данные фиксируются в регистраторе 26.
учитывающих влияние второго настроечного параметра на положения регулятора 7 и дросселя 12 горючего при R=0,83 Rном. Эти данные фиксируются в регистраторе 26.
Аналогичные процедуры измерения массовых секундных расходов компонентов топлива, вычисления коэффициентов передачи, а затем углов точной настройки регулирующих устройств производят на трех остальных режимах работы двигателя, т.е. после его плавного дросселирования в интервале времени τ11...τ12 на уровень тяги, равный, например, 0,5 Rном, a затем после двух других изменений положения регулятора тяги и дросселя горючего в моменты времени τ17 и τ23.
Процедура настройки двигателя на 1-ом режиме пояснена структурной схемой алгоритма основных выполняемых операций, приведенной на фиг.4. Алгоритм настройки двигателя на остальных режимах его работы аналогичен и отличается лишь количеством измерений массовых секундных расходов компонентов топлива и числом перестроек регулятора тяги 7.
Таким образом, в результате проведенного испытания для вычисления индивидуальных констант этого двигателя имеют следующие данные, зафиксированные в регистраторе 26:
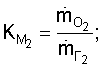
1. Пять значений углов β4, β8, β12, β16 и β20 регулятора тяги, соответствующих точной настройке двигателя на уровни тяги R4=1.0; R8=0.83; R12=0.5 и так далее при  Зависимость β=f(R) представляют в виде полинома n-ой степени:
Зависимость β=f(R) представляют в виде полинома n-ой степени:

постоянные коэффициенты которого определяют, например, по соотношениям, известным из метода наименьших квадратов, используя значения углов β4, β8, ..., β0 (Е.С.Вентцель «Теория вероятностей» Государственное издание физико-математической литературы. М. 1962 г. Глава 14).
2. Пять значений углов α4, α8, α12, α16 и α20 настройки дросселя горючего для поддержания номинального соотношения компонентов топлива на вышеуказанных режимах работы двигателя. Зависимость α=f(R) также записывают в виде полинома n-ой степени:

а его постоянные коэффициенты В0, В1, В2, ..., Вn определяют, используя значения углов α4, α8, ...α20 также по методу наименьших квадратов.
3. По пять значений коэффициентов 
 учитывающих влияние второго настроечного параметра на положения регулирующих устройств для конкретного режима работы двигателя. Зависимости этих коэффициентов от уровня тяги также записывают в виде полиномов n-ой степени:
учитывающих влияние второго настроечного параметра на положения регулирующих устройств для конкретного режима работы двигателя. Зависимости этих коэффициентов от уровня тяги также записывают в виде полиномов n-ой степени:


а их постоянные коэффициенты также определяют по методу наименьших квадратов, используя значения
 и
и 
Вычисленные коэффициенты Аn, Вn, Сn, Dn полиномов [18]...[21] являются индивидуальными константами для данного экземпляра двигателя. Их вводят в уравнения [1], по которым регулируют его тягу и соотношение компонентов топлива на всех последующих запусках, включая его работу в составе ракетоносителя.
Уравнения [1] получены следующим образом.
Если на последующих запусках двигателя коэффициент соотношения компонентов остается постоянной величиной и равной его номинальному значению  т.е. тому значению, на которое настраивался двигатель, то для регулирования могут быть использованы полиномы [18], [19]:
т.е. тому значению, на которое настраивался двигатель, то для регулирования могут быть использованы полиномы [18], [19]:

Но поскольку, например при работе двигателя в составе ракетоносителя, КМ меняется с целью наиболее эффективного использования компонентов топлива, то в уравнения [22] необходимо ввести поправки, учитывающие фактические отклонения КМ от номинального значения.
Тогда положения регулирующих устройств можно записать в виде следующих уравнений, идентичных уравнениям [1]:
Сущность способа регулирования параметров ЖРД в процессе его работы в составе ракетоносителя заключается в следующем.
После запуска двигатель выводят на режим с уровнем стартовой тяги, равной, например, R0 (фигура 3), при номинальном значении коэффициента КМ. Положения регулирующих устройств двигателя для обеспечения этого режима определяют по уравнениям [23], [24] для R=R0 и  В момент времени τ1 проводят программное дросселирование двигателя до уровня тяги R1 Значение угла β1, на который перестраивается регулятор тяги, определяют по уравнению [23]. Одновременно корректируют положение дросселя горючего для поддержания номинального значения КМ. Его новое положение вычисляют по уравнению [24] при R=R1. В момент времени τ2 двигатель программно переводят на режим с уровнем тяги, например, равным R2. Положение регулятора тяги и дросселя горючего, которые они должны занять для обеспечения этого режима, вновь определяют по уравнениям [23] и [24] для R=R2 и
В момент времени τ1 проводят программное дросселирование двигателя до уровня тяги R1 Значение угла β1, на который перестраивается регулятор тяги, определяют по уравнению [23]. Одновременно корректируют положение дросселя горючего для поддержания номинального значения КМ. Его новое положение вычисляют по уравнению [24] при R=R1. В момент времени τ2 двигатель программно переводят на режим с уровнем тяги, например, равным R2. Положение регулятора тяги и дросселя горючего, которые они должны занять для обеспечения этого режима, вновь определяют по уравнениям [23] и [24] для R=R2 и 
В момент времени τ3 от бортовой системы контроля опорожнения баков в устройство управления ракетоносителем поступает команда на изменение коэффициента соотношения компонентов, например, до значения, равного КМ1. Угол настройки дросселя горючего для этого режима вновь вычисляют по уравнению [24]. Одновременно корректируют положение регулятора тяги в соответствии с уравнением [23] с тем, чтобы сохранить ее уровень на заданном значении R2.
Возможно изменение программно заданного значения уровня тяги R2 от системы контроля кажущейся скорости ракетоносителя (момент времени τ4). При этом новые положения регулирующих устройств двигателя определяются по уравнениям [23] и [24] для R=R3 и 
Аналогичным образом осуществляют регулирование параметров двигателя при его плавном дросселировании до уровня тяги Rкст (кст - конечная ступень) в интервале времени τ5...τ6. Дросселирование двигателя проводят ступенчато с определенным временным шагом, равным, например, Δτj, для каждого из которых уровень тяги Rj рассчитывают по следующему соотношению:

где τj=(τ5+Δτj); (τ5+2Δτj); (τ5+3Δτj); ...τ6.
Положения регулирующих устройств в каждом такте определяют по базовым уравнениям [23] и [24].
Следует отметить, что температура компонентов топлива на этом запуске двигателя должна быть достаточно близка к тем значениям, которые окислитель и горючее имели на настроечном испытании.
Таким образом, точность регулирования по предлагаемому способу повышена за счет того, что при любом изменении одного из параметров изделия, в частности ЖРД, значение другого параметра остается неизменным и равным той величине, которое оно должно иметь в данный момент времени.
Промышленная применимость
Предлагаемое изобретение в варианте его использования для настройки и регулирования параметров ЖРД проработано на нашем предприятии во всех аспектах и готово к практическому применению для нескольких типов двигателей, изготавливаемых нашим НПО.
Рекомендуется к широкому применению ввиду своей простоты, надежности и точности настройки и регулирования двух взаимовлияющих параметров, определяющих режим работы любых изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2278988C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОВАНИЕМ ТОПЛИВА РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2024 |
|
RU2834635C1 |
| Способ коррекции математической модели жидкостного ракетного двигателя | 2020 |
|
RU2749497C1 |
| ДРОССЕЛИРУЕМЫЙ КИСЛОРОДНО-УГЛЕВОДОРОДНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ВОССТАНОВИТЕЛЬНОГО ГАЗА | 2002 |
|
RU2238423C2 |
| Способ настройки системы аварийной защиты жидкостного ракетного двигателя | 2021 |
|
RU2791158C1 |
| Способ регулирования соотношения компонентов топлива жидкостного ракетного двигателя | 2024 |
|
RU2836201C1 |
| Способ регулирования параметров жидкостного ракетного двигателя | 2019 |
|
RU2756558C2 |
| Способ адаптивной настройки контролируемых параметров системы аварийной защиты жидкостного ракетного двигателя на первое огневое испытание | 2022 |
|
RU2800833C1 |
| ВИХРЕВОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МАЛОЙ ТЯГИ НА ГАЗООБРАЗНОМ ТОПЛИВЕ | 2015 |
|
RU2591391C1 |


Изобретения предназначены для использования в различных отраслях промышленности, где необходимо регулировать два взаимовлияющих параметра с помощью двух регулирующих устройств, в частности в ракетно-космической технике для регулирования тяги и соотношения компонентов топлива ЖРД. После изготовления изделия проводят его проверочное испытание не менее чем на трех режимах с разными значениями первого параметра, принятого за приоритетный. На каждом режиме сначала устанавливают регулирующие устройства в положения, определяемые расчетным путем, а затем поочередно перестраивают их в заранее выбранные положения и измеряют параметры изделия. Полученные данные используют для определения коэффициентов передачи регулирующих устройств и их корректирующих воздействий, после чего настраивают изделие на заданное значение первого параметра и на одно и то же для всех режимов значение второго параметра. После проведения испытания устанавливают зависимости скорректированных положений регулирующих устройств и коэффициентов, учитывающих влияние на них второго параметра в виде полиномов n-ной степени, постоянные коэффициенты которых являются индивидуальными константами данного изделия. Регулирование параметров изделия при его штатной эксплуатации осуществляют путем одновременной перестройки регулирующих устройств в положения, вычисляемые по уравнениям их полиномиальной зависимости от текущих значений первого параметра и поправок на отклонения второго параметра от того значения, на которое настраивалось изделие в процессе проверочного испытания. Причем постоянными коэффициентами этих полиномиальных зависимостей являются индивидуальные константы данного изделия. Текущие значения параметров предварительно формируют в виде задания их реализации в функции времени и предусматривают их коррекцию в зависимости от реальных условий работы изделия. Такие способы позволят обеспечить точность настройки и регулирования параметров изделия. 2 н. и 2 з. п. ф-лы, 4 ил.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| RU 2063535 C1, 10.07.1996 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2000 |
|
RU2180704C2 |
| СПОСОБ СИГНАЛИЗАЦИИ ОТКЛОНЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА СИЛЫ ТЯГИ ОТ ОСИ РДТТ | 2001 |
|
RU2191915C1 |
| МНОГОСТУПЕНЧАТАЯ СИСТЕМА ОХЛАЖДЕНИЯ ЭЛЕКТРОННЫХ КОМПОНЕНТОВ ВОЗДУШНОГО СУДНА | 2007 |
|
RU2457983C2 |
| DE 2922576 A, 23.04.1981. | |||

