Область техники
Изобретение может быть использовано в различных областях техники, где необходимо регулировать параметры объекта с помощью входящих в его состав регулирующих устройств, в частности в ракетно-космической технике для регулирования жидкостного ракетного двигателя (ЖРД) при его повторных огневых стендовых испытаниях и при использовании в составе ракеты-носителя.
Уровень техники
Известен способ регулирования параметров ЖРД по патенту №2278988, МПК F02K 9/56, 2003 г., предусматривающий установку приводов агрегатов регулирования ЖРД в положения, рассчитанные по полиномам в соответствии с заданными значениями тяги, коэффициента соотношения компонентов топлива и температурам компонентов на входе в двигатель. Полиномы определяются по результатам предварительно проведенных огневых стендовых испытаний данного экземпляра двигателя.
Этот способ принят за прототип, так как он предназначен для использования при повторных огневых стендовых испытаниях и при использовании в составе ракеты-носителя, основан на использовании результатов обработки экспериментальных данных и в конечном виде представляет полиномы, описывающие регулирование испытанного ЖРД. Однако прототип имеет следующие недостатки - он осуществляет регулирование ЖРД без учета влияния давлений компонентов топлива на входе в двигатель и обеспечивает точность регулирования лишь в ограниченном диапазоне условий эксплуатации двигателя, близком к номинальным.
Раскрытие изобретения
Задача изобретения состояла в разработке способа регулирования параметров жидкостного ракетного двигателя при его повторных огневых стендовых испытаниях и при использовании в составе ракеты-носителя, заключающегося в регулировании двигателя в соответствии с заданными условиями его эксплуатации по зависимостям, которые ранее были определены по результатам измерений параметров двигателя при огневом стендовом испытании, который не имеет указанных недостатков прототипа и отличается тем, что приводы агрегатов регулирования устанавливаются в положения, которые соответствуют требуемым значениям тяги, коэффициента соотношения компонентов топлива, температур и давлений компонентов топлива на входе в двигатель и рассчитываются по математической модели данного экземпляра двигателя или по полиномам регулирования данного двигателя, полученным путем аппроксимации результатов расчетов, проведенных по математической модели данного двигателя и имитирующих проведение многорежимного огневого испытания.
Технический результат заключается в том, что достигается повышение точности регулирования параметров ЖРД во всем диапазоне условий эксплуатации двигателей данного типа, что в конечном счете приводит к выполнению высоких требований по экономичности и безопасности стендовых испытаний и летной эксплуатации современного мощного ЖРД.
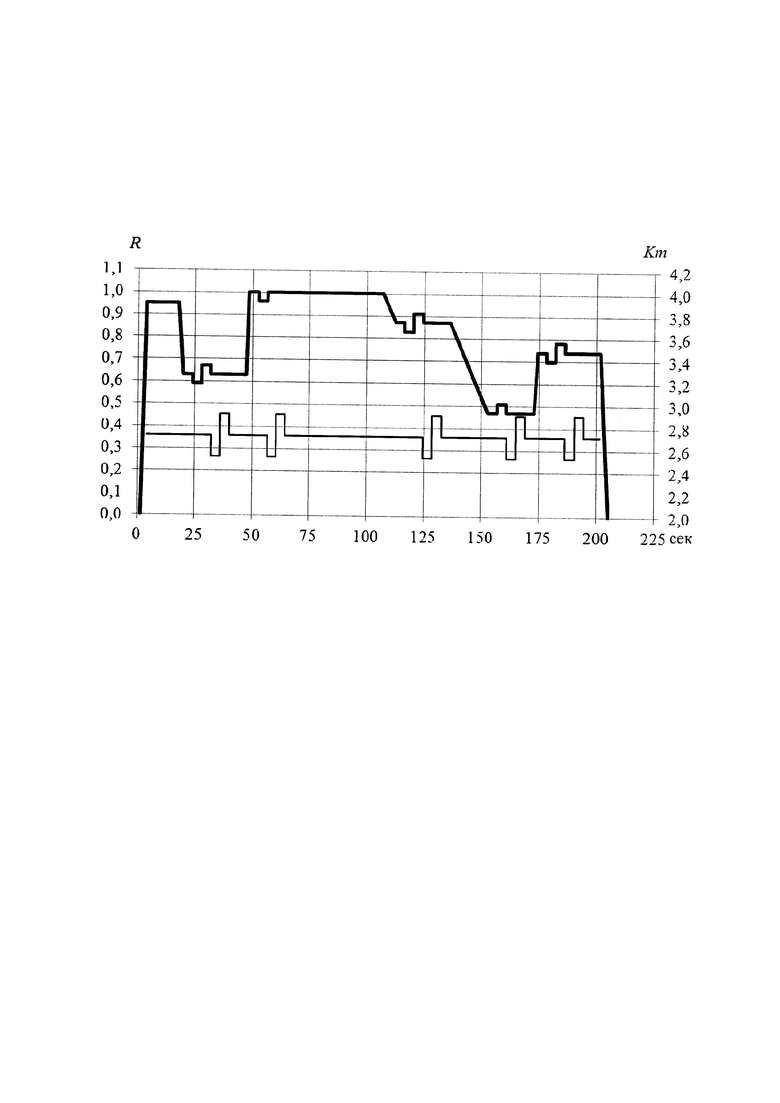
Поставленная цель достигается за счет того, что регулирование двигателя осуществляется с использованием математическая модели данного двигателя, которая формируется идентификацией математической модели этого типа двигателя по результатам измерений параметров конкретного ЖРД, полученным на предварительно проведенном стендовом испытании, содержащем достаточное количество различных режимов. Например, достоверный результат идентификации достигается при использовании штатной циклограммы контрольно-технологического испытания двухкомпонентного ЖРД, работающего по схеме с дожиганием в камере окислительного генераторного газа и регулируемого по тяге и соотношению компонентов топлива, приведенной на чертеже.
Входными параметрами такой математической модели являются значения условий эксплуатации ЖРД, выходными параметрами - значения положений приводов агрегатов регулирования.
Практика показывает, что такая математическая модель наиболее полно отражает характеристики функционирования конкретного экземпляра двигателя, выявленные на огневом испытании, и обеспечивает повышение точности регулирования параметров ЖРД во всем диапазоне условий эксплуатации двигателей данного типа, что недостижимо иными методами.
Полиномы регулирования данного двигателя определяются путем аппроксимации результатов расчетов, проведенных по математической модели данного двигателя и имитирующих проведение многорежимного огневого испытания.
Например, для двухкомпонентного ЖРД, работающего по схеме с дожиганием в камере окислительного генераторного газа и регулируемого по тяге и соотношению компонентов топлива, результаты расчетов положений приводов агрегатов регулирования аппроксимируются функциями шести переменных как

где  - положения приводов регулятора расхода компонента в газогенератор и дросселя горючего на входе в камеру сгорания;
- положения приводов регулятора расхода компонента в газогенератор и дросселя горючего на входе в камеру сгорания;
R - уровень тяги в пустоте;
Km - коэффициент соотношения компонентов топлива;
 - температуры окислителя и горючего на входе в двигатель;
- температуры окислителя и горючего на входе в двигатель;
 - давления окислителя и горючего на входе в двигатель и описываются с помощью полиномов вида
- давления окислителя и горючего на входе в двигатель и описываются с помощью полиномов вида

где произведения  - всевозможные неповторяющиеся пары указанных переменных.
- всевозможные неповторяющиеся пары указанных переменных.
Входными параметрами полиномов регулирования также являются значения условий его эксплуатации, выходными параметрами являются значения положений приводов агрегатов регулирования, соответствующие заданным значениям этих условий.
Для осуществления регулирования конкретного двигателя при его повторных огневых стендовых испытаниях и при использовании в составе ракеты-носителя математическая модель данного двигателя или его полиномы регулирования закладываются в ЭВМ стендовой системы управления или в ЭВМ на борту ракеты-носителя.
Перечень фигур
На чертежее приведена циклограмма контрольно-технологического испытания двухкомпонентного ЖРД, работающего по схеме с дожиганием в камере окислительного генераторного газа и регулируемого по тяге и соотношению компонентов топлива, содержащая количество различных режимов работы двигателя, достаточное для идентификации математической модели: профили изменения значений уровня пустотной тяги R и коэффициента соотношения компонентов топлива Km по времени испытания.
Сведения, подтверждающие возможность осуществления изобретения
Способ регулирования параметров ЖРД определяется следующим образом
- проводится огневое стендовое испытание ЖРД по циклограмме, содержащей достаточное количество различных режимов работы, и измеряются параметры двигателя на всех режимах испытания;
- по результатам измерений идентифицируется математическая модель этого типа двигателя, в результате чего определяется математическая модель конкретного испытанного двигателя.
Для расчетной имитации проведения многорежимного огневого испытания данного экземпляра двигателя во всем диапазоне условий эксплуатации двигателя по его математической модели проводятся многовариантные расчеты положений приводов агрегатов регулирования как функций шести входных параметров модели и аппроксимацией полученных данных определяются полиномы регулирования этого двигателя.
При проведении повторных стендовых испытаний предлагаемый способ регулирования параметров ЖРД используется для
1. управления двигателем непосредственно во время испытания по его математической модели или его полиномам регулирования, заложенным в ЭВМ стендовой системы управления,
2. управления двигателем по конкретным положениям приводов агрегатов регулирования, заранее определенным по математической модели данного двигателя или его полиномам регулирования согласно циклограмме и внешним условиям планируемого испытания.
В процессе работы ЖРД в составе ракеты-носителя предлагаемый способ регулирования ЖРД используется следующим образом.
1. До старта в память бортовой ЭВМ, управляющей ракетой-носителем, закладывается программа условий полета как функции времени и математическая модель или полиномы регулирования конкретного используемого в полете двигателя, определяющие зависимости положений приводов агрегатов регулирования как функций значений тяги, коэффициента соотношения компонентов топлива и условий на входе в двигатель,
2. Во время полета приводы агрегатов регулирования двигателя устанавливаются в положения, определенные для требуемых условий полета по заложенной в память бортовой ЭВМ математической модели конкретного двигателя или его полиномам регулирования. Промышленная применимость
Предлагаемый способ регулирования параметров жидкостного ракетного двигателя проработан на нашем предприятии и прошел апробирование в циклах повторных стендовых испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции математической модели жидкостного ракетного двигателя | 2020 |
|
RU2749497C1 |
| Способ контроля технического состояния жидкостного ракетного двигателя многократного использования в составе возвращаемой ступени ракеты-носителя | 2022 |
|
RU2804438C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОВАНИЕМ ТОПЛИВА РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2024 |
|
RU2834635C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2149439C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАСХОДОМ КОМПОНЕНТА ТОПЛИВА ЖРД | 2016 |
|
RU2622677C1 |
| Способ настройки системы аварийной защиты жидкостного ракетного двигателя | 2021 |
|
RU2791158C1 |
| Способ адаптивной настройки контролируемых параметров системы аварийной защиты жидкостного ракетного двигателя на первое огневое испытание | 2022 |
|
RU2800833C1 |
| Способ коррекции математической модели жидкостного ракетного двигателя | 2022 |
|
RU2820905C2 |
| СПОСОБЫ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ИЗДЕЛИЯ, В ЧАСТНОСТИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2282046C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ НАСОСОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2021 |
|
RU2791147C1 |
Изобретение относится к регулированию параметров объекта с помощью входящих в его состав регулирующих устройств, в частности в ракетно-космической технике для регулирования жидкостного ракетного двигателя. Способ регулирования параметров ЖРД заключается в установке приводов агрегатов регулирования в положения, которые соответствуют требуемым значениям тяги, коэффициента соотношения компонентов топлива, температур и давлений компонентов топлива на входе в двигатель и определяются по математической модели данного двигателя или по полиномам регулирования данного двигателя, полученным путем аппроксимации результатов расчетов, проведенных по математической модели данного двигателя, и закладываются в ЭВМ стендовой системы управления или бортовую ЭВМ ракеты-носителя. Математическая модель данного двигателя формируется идентификацией по результатам измерений параметров ЖРД, полученным на предварительно проведенном многорежимном стендовом испытании. Полиномы регулирования данного двигателя определяются путем аппроксимации результатов расчетов, проведенных по математической модели данного двигателя. Изобретение обеспечивает повышение точности регулирования параметров жидкостного ракетного двигателя. 1 з.п. ф-лы, 1 ил.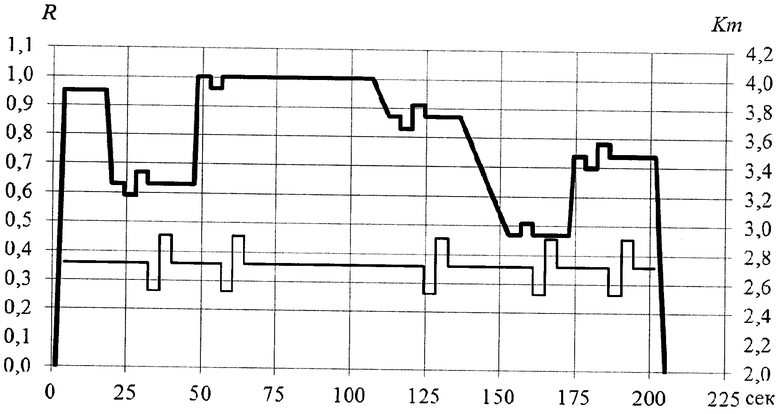
1. Способ регулирования параметров жидкостного ракетного двигателя при его повторных огневых стендовых испытаниях и при использовании в составе ракеты-носителя, заключающийся в регулировании двигателя по заданным условиям его эксплуатации, и отличающийся тем, что
приводы агрегатов регулирования конкретного двигателя устанавливают в положения, которые соответствуют требуемым значениям тяги, коэффициента соотношения компонентов топлива, а также фактических температур и давлений компонентов топлива на входе в двигатель, и определяют по математической модели данного двигателя, заложенной в ЭВМ стендовой системы управления или в ЭВМ на борту ракеты-носителя,
для чего предварительно проводят многорежимное огневое стендовое испытание данного двигателя и на каждом режиме измеряют его параметры,
по результатам измерений идентифицируют математическую модель этого типа двигателя и формируют математическую модель данного испытанного двигателя, входными параметрами которой являются значения тяги, коэффициента соотношения компонентов топлива, а также температур и давлений компонентов топлива на входе в двигатель, выходными параметрами - значения положений приводов агрегатов регулирования,
математическую модель данного испытанного двигателя закладывают в ЭВМ стендовой системы управления или бортовую ЭВМ ракеты-носителя и по ней регулируют его в фактических условиях эксплуатации во время его повторных стендовых испытаний или полета в составе ракеты-носителя.
2. Способ регулирования параметров жидкостного ракетного двигателя по п. 1, отличающийся тем, что
приводы агрегатов регулирования конкретного двигателя устанавливают в положения, которые определены по полиномам регулирования данного двигателя, полученным путем аппроксимации результатов расчетов, проведенных по математической модели данного двигателя, и заложенным в ЭВМ стендовой системы управления или в ЭВМ на борту ракеты-носителя,
для чего по математической модели данного двигателя проводят многовариантные расчеты положений приводов агрегатов регулирования как функций значений тяги, коэффициента соотношения компонентов топлива, а также фактических температур и давлений компонентов топлива на входе в двигатель, и аппроксимацией полученных данных определяют полиномы регулирования данного двигателя, которые закладывают в ЭВМ стендовой системы управления или бортовую ЭВМ ракеты-носителя и по ним регулируют двигатель в фактических условиях эксплуатации во время его повторных стендовых испытаний или полета в составе ракеты-носителя.
| СПОСОБ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2278988C2 |
| RU 2063535 C1, 10.07.1996 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОСНОВНЫХ ПАРАМЕТРОВ РАКЕТНЫХ ДВИГАТЕЛЕЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ, ИСПОЛЬЗУЮЩЕЙ ГАЗООБРАЗНЫЕ КОМПОНЕНТЫ ТОПЛИВА | 2011 |
|
RU2486362C1 |
| DE 112011103264 T5, 18.07.2013 | |||
| WO 2012045939 A1, 12.04.2012. | |||

