Предлагаемое устройство относится к приборам, измеряющим угловую скорость, в частности к управляющим устройствам этих приборов.
В настоящее время разработаны и широко используются микромеханические устройства, содержащие подвижный механический элемент, электростатический задатчик силы и датчик перемещения подвижного элемента или подвижной массы (ПМ). Такие микромеханические элементы используются в микромеханических акселерометрах, гироскопах, датчиках давления и т.д. (см. В.Я.Распопов Микромеханические приборы. Учебное пособие. Тул. гос. университет., Тула, 2002 г., 392 стр.).
Известны микромеханические гироскопы (ММГ) LL- и RR-типов с гребенчатыми двигателями, описанные в литературе (см., например, М.И.Евстифеев Состояние разработок и перспективы развития микромеханических гироскопов// Навигация и управление движением: Сборник докладов II научно-технической конференции молодых ученых. - СПб.: ЦНИИ «Электроприбор», 2000. - С.54-71, патент США № 5025346, свидетельство России на полезную модель № 18768). Формирования силы или момента (в случае гироскопов RR-типа) в них осуществляется путем подачи на электроды постоянного и переменного напряжений от устройства управления гребенчатым двигателем. Суммарное напряжение, поступающее на электроды, имеет вид (см. столбец 4 патента США № 5025346):
UD(t)=UP+Ud·sin(ωt),
где UP - величина постоянного напряжения;
Ud - амплитуда переменной составляющей;
ω - угловая частота, равная резонансной частоте подвеса ротора.
Формирование управляющего напряжения осуществляет устройство управления гребенчатым двигателем микромеханического гироскопа, которое преобразует сигнал емкостного датчика положения ротора в управляющее напряжение Ud.
Известны различные структуры таких устройств управления.
Так, в пат. США № 6626039 устройство управления включает в себя емкостной датчик положения ротора, образованный электродами и ротором ММГ, и усилителем (элементы 58, 59, 64, 65 на фиг.8 описания к этому патенту), фазосдвигающее устройство (элементы 61), ограничитель сигнала ((элемент 60) и выходной каскад (элементы 53-55), выход которого подключен к электродам гребенчатого двигателя.
Устройство управления работает следующим образом. Усиленный сигнал датчика перемещений сдвигается на 90° и поступает на электроды двигателя. В этом контуре благодаря наличию сдвига фазы на 90° на частоте резонанса ω подвеса ротора и 90-градусного сдвига, вносимого элементом 61, возникает положительная обратная связь, что приводит к росту напряжения на электродах двигателя до тех пор, пока сигнал на входе элемента 60 не достигнет порогового значения. Этот уровень сигнала и соответствует установившемуся значению амплитуды колебаний. Недостатком такого устройства является невысокая точность стабилизации амплитуды колебаний, обусловленная двумя факторами: сложностью обеспечения постоянных уровней ограничения в элементе 60 и изменение эффективного значения ограничения из-за изменения формы напряжения на входе этого элемента. Поэтому при изменении добротности подвеса ротора (Q), например, в сторону увеличения амплитуда напряжения на входе нелинейного элемента также будет возрастать, однако эффективное значение коэффициента передачи этого элемента, которое может быть получено известным методом гармонической линеаризации, снизится. Это, в конечном счете, скомпенсирует увеличение контурного усиления, обусловленное возрастанием Q. Другим недостатком описанной схемы является то, что в нем поддерживается постоянной амплитуда перемещения ПМ, а не ее скорости. Как известно, кориолисово ускорение ПМ по оси вторичных колебаний пропорционально значению скорости перемещения ПМ по оси первичных колебаний (см., например, выражение 2 в пат. США № 5992233).
Поэтому изменение частоты ω (под влиянием температуры или от образца к образцу) будет приводить к изменению масштабного коэффициента ММГ, что снижает точность или приводит к усложнению приборов, в которых используется ММГ.
Структура устройства управления гребенчатым двигателем ММГ с более точной стабилизацией амплитуды перемещений ПМ приведена в пат. США № 6765305. На фиг.4 показан состав электронных узлов, включенных между выходом датчика перемещения ПМ ММГ и электродами управления. В него входят фазосдвигающее устройство (201), выходной каскад с регулируемым коэффициентом передачи (203), цепь из последовательно соединенных выпрямителя (206) и регулятора (207). Вход выпрямителя 206, как и фазосдвигающее устройство 201, соединены с выходом датчика перемещения ПМ, а выход регулятора 207 соединен со входом для регулирования коэффициента передачи выходного каскада 203. В этой структуре элементом 206 выделяется значение амплитуды входного сигнала, которое сравнивается элементом 208 с заданным значением, а затем элементом 207 преобразуется в необходимый сигнал управления элементом 203. По сути, на фиг.4 приведена структура системы с АРУ (автоматической регулировкой усиления), которая может обеспечить нулевое значение статической ошибки стабилизации амплитуды (без учета погрешностей элементов 206 и 208).
Разные варианты реализации регулятора и выпрямителя приведены в Patent application Publication № 2001/0022107, в частности, выпрямитель реализован в виде синхронного детектора 9, устройство сдвига фазы на 90° в виде интегратора или дифференциатора (см. фиг.9, 12, 11). В этом устройстве стабилизация амплитуды осуществляется за счет изменения коэффициента усиления в контуре автоколебаний в зависимости от разности между заданным значением амплитуды и значением величины сигнала, полученным на выходе синхронного детектора. Оба описанных выше устройства не обеспечивают постоянства коэффициента передачи ММГ в случае изменения резонансной частоты подвеса ротора ω. Это обусловлено тем, что в них осуществляется стабилизация амплитуды перемещения ПМ, а не ее скорости.
Задачей, на решение которой направлено изобретение, является поддержание постоянным коэффициента передачи ММГ в случае изменения параметров резонансного подвеса ПМ по оси первичных колебаний.
Решение указанной задачи достигается тем, что в устройстве управления гребенчатым двигателем микромеханического гироскопа, содержащем последовательно включенные емкостной датчик положения ротора, фазосдвигающее устройство, выходной каскад с регулируемым коэффициентом передачи и емкостной датчик момента, включенную между выходом емкостного датчика положения ротора и входом для регулирования коэффициента передачи выходного каскада цепь из последовательно соединенных выпрямителя и регулятора, между выходом емкостного датчика положения ротора и входом выпрямителя введено корректирующее звено.
Кроме того, решение указанной задачи достигается тем, что передаточная функция корректирующего звена W(p) имеет вид
где Т1>1/ω>Т2.
Кроме того, решение указанной задачи достигается тем, что в него введено устройство автоматической регулировки усиления, вход которого подключен к выходу емкостного датчика положения ротора.
Основное преимущество предлагаемого изобретения обусловлено введением корректирующего звена, которое в окрестности угловой частоты ω преобразует входной сигнал в его производную. Амплитуда этой производной пропорциональна скорости перемещения ПМ. Поэтому в отличие от прототипа в предлагаемом устройстве заявленная совокупность признаков позволяет повысить точность ММГ.
Заявленное устройство поясняется чертежами.
На фиг.1 приведена блок-схема предлагаемого устройства.
На фиг.1 приняты следующие обозначения:
1 - емкостной датчик положения ротора на оси первичных колебаний,
2 - устройство сдвига фазы на 90°,
3 - выходной каскад,
4 - электроды датчика момента ММГ,
5 - выпрямитель,
6 - регулятор,
7 - интегратор,
8 - устройство сравнения,
9 - источник опорного сигнала,
10 - корректирующее звено,
11 - электронный блок устройства управления гребенчатым двигателем.
На фиг.2 приведена блок-схема предлагаемого устройства и его связь с выходным каналом
На фиг.2 приняты следующие обозначения:
1 - емкостной датчик положения ротора на оси первичных колебаний,
4 - электроды датчика момента ММГ,
11 - электронный блок устройства управления гребенчатым двигателем,
12 - емкостной датчик положения ротора на выходной оси ММГ,
13 - усилитель,
14 - демодулятор,
15 - схема автоматической регулировки усиления (АРУ).
Предлагаемое устройство управления гребенчатым двигателем микромеханического гироскопа (см. фиг.1) содержит включенный между выходом емкостного датчика положения ротора на оси первичных колебаний 1 и электродами датчика момента 4 электронный блок 11. Электроды 4 расположены на оси первичных колебаний ротора. Устройство 11 включает в себя последовательно включенные корректирующее звено 10, выпрямитель 5 и регулятор 6. При этом вход корректирующего звена 10 соединен с входом устройства 2, а выход регулятора 6 соединен с входом для регулирования коэффициента передачи выходного каскада 3. Регулятор 6 включает в себя устройство сравнения 8, источник опорного сигнала 9 и интегрирующее звено 7.
Предлагаемое устройство работает следующим образом.
Элементы 1-4 вместе с ПМ на резонансном подвесе образуют контур с положительной обратной связью, в которой при контурном усилении, равном 1, возникают устойчивые автоколебания. Элементы 10, 5 и 6 находятся в цепи автоматической регулировки усиления выходного каскада 3. В регуляторе 6 устройства 8 выделяет разность между сигналом на выходе выпрямителя 5 и опорным сигналом на выходе источника 9. Эта разность поступает на вход интегратора 7, выходной сигнал которого изменяет коэффициент передачи каскада 3 до тех пор, пока разность сигналов на выходе устройство 8 не станет равным нулю. Напряжение на выходе введенного корректирующего звена 10 равно напряжению на выходе датчика 1, умноженному на значение коэффициента передачи звена 10 на частоте входного сигнала, т.е. на частоте автоколебаний или резонансной частоте ω. Т.к. передаточная функция звена 10 определяется выражением
где Т1>1/ω>Т2
можно считать, что в окрестности частоты ω входной сигнал звена 10 дифференцируется. Амплитудное значение гармонического сигнала Asin(ω t) после дифференцирования равно Аω. Поэтому сигнал на выходе выпрямителя 5 оказывается равен (или пропорционален) Аω. Поскольку в предложенном устройстве поддерживается постоянной величина Аω, то при изменении ω величина А также будет изменяться, но в противоположном направлении. При этом обеспечивается постоянство скорости перемещения ПМ и соответственно коэффициента преобразования измеряемой угловой скорости в выходной сигнал ММГ. Отметим, что дифференцирование звеном 10 может осуществляться в достаточно узком частотном диапазоне. Количественная оценка показывает, что в прототипе (без корректирующего звена 10) изменение резонансной частоты подвеса ω на 10% приводит к изменению масштабного коэффициента на те же 10%, тогда как в предложенном устройстве при том же изменении резонансной частоты ω на 10% и значении отношения Т1/Т2=10 изменение масштабного коэффициента не превышает 2%, а при значении отношения Т1/Т2=25 изменению масштабного коэффициента не превышает 0,7%.
На фиг.2 показана связь между каналом первичных колебаний и выходным каналом ММГ. Здесь элементы 1, 11 и 4 соединены так, как показано на фиг.1. Выходной канал образован емкостным датчиком положения ротора на выходной оси ММГ 12, усилителем 13 и демодулятором 14. При этом выход датчиком положения 12 соединен со входом усилителя 13, выход которого подключен ко входу демодулятора 14. Между выходом датчика положения 1 и входом для опорного сигнала демодулятора 14 включена схема АРУ 15.
Устройство на фиг.2 целесообразно применять в случае использования демодулятора 14, построенного по схеме синхронного детектора на аналоговом умножителе (см. Справочник по нелинейным схемам под ред. Шейнголда Д., Мир, М., 1977 г., фиг.2.4.9). Схема такого детектора с синусоидальным сигналом на обоих входах обладает повышенной помехозащищенностью. Однако коэффициент передачи такого демодулятора зависит от амплитуды опорного сигнала. Поскольку амплитуда сигнала на выходе датчика положения 1 может изменяться в зависимости от частоты ω, в ММГ без схемы АРУ 15 масштабный коэффициент будет изменяться при изменении ω, правда в 2 раза меньше, чем в прототипе. Отметим, что в случае использования прямоугольного опорного сигнала в демодуляторе 14 масштабный коэффициент остается неизменным даже при изменении частоты ω. Введенная схема АРУ 15 сохраняет сигнал на своем выходе неизменным при изменении амплитуды сигнала на входе, обусловленном изменением частоты ω. Пример реализации схемы АРУ приведен в упомянутой выше книге Шейнголда на стр.135-137. Таким образом, в ММГ с предложенным устройством управления гребенчатым двигателем обеспечено уменьшение влияния резонансной частоты подвеса ПМ на масштабный коэффициент и тем самым повышена точность ММГ.

Изобретение относится к области приборостроения, в частности к устройствам управления гребенчатым двигателем. Технический результат - повышение точности. Для достижения данного результата устройство содержит последовательно включенные емкостной датчик положения ротора, фазосдвигающее устройство, выходной каскад с регулируемым коэффициентом передачи и емкостной датчик момента. При этом между выходом емкостного датчика положения ротора и входом для регулирования коэффициента передачи выходного каскада введена цепь из последовательно соединенных выпрямителя и регулятора, а между выходом емкостного датчика положения ротора и входом выпрямителя введено корректирующее звено. 2 з.п. ф-лы, 2 ил.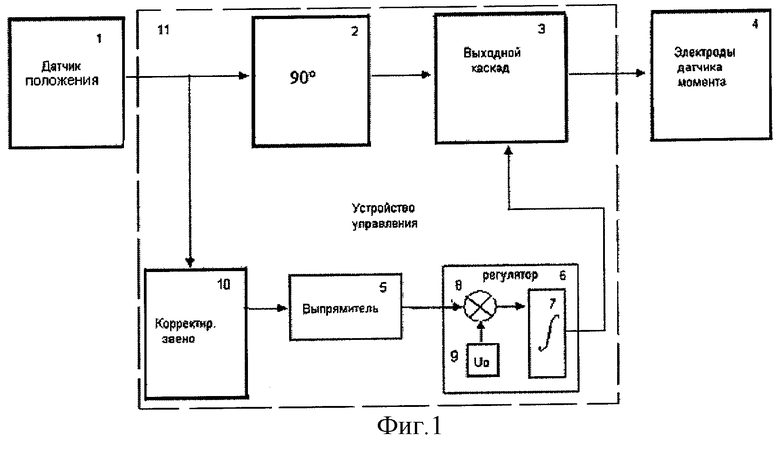
где Т1>1/ω>Т2.
| US 2001022107 А, 20.09.2001 | |||
| US 2003151394 А, 14.08.2003 | |||
| US 5992233 А, 30.11.1999 | |||
| US 6626039 А, 30.09.2003 | |||
| Евстифеев М.И | |||
| Состояние разработок и перспективы развития микромеханических гироскопов | |||
| Навигация и управление движением | |||
| Сборник докладов II научно-технической конференции молодых ученых | |||
| - СПб.: ЦНИИ «Электроприбор», 2000, с.54-71. |

