Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа и схемам подстройки параметров колебательных контуров подвеса в этих гироскопах.
В ММГ подвижная масса (ПМ) крепится к основанию с помощью, по крайней мере, двухосного резонансного подвеса. Резонансная частота подвеса по оси первичных колебаний выбирается ниже резонансной частоты подвеса по оси вторичных колебаний. Возможны режимы работы ММГ как с совпадением резонансных частот подвеса, так и работа с малым сдвигом резонансных частот этих подвесов. В обоих случаях подстройка резонансных частот осуществляется за счет использования так называемой отрицательной жесткости и достигается путем подачи напряжения определенной величины на электроды, которые располагаются на оси вторичных колебаний. Пример реализации такой подстройки приведен на стр.412-413 в книге Распопов В.Я. Микромеханические приборы, 2-е издание. Тул. Гос. Университет, Тула, 2004 г., 475 стр.А, пример работы ММГ с расстройкой резонансных частот подвесов приведен на стр.451 рис.5.5.3. этой книги.
В работе [Пешехонов и др. Результаты разработки микромеханического гироскопа. XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, 23-25 мая 2005 г., стр.268-274] описан ММГ RR-типа, в котором для управления используются электроды, расположенные на крышке. Эти же электроды могут использоваться для сведения резонансных частот подвесов, как это было предложено в пат. США №6067858. Возможность подстройки резонансной частоты постоянным напряжением, подаваемым на электроды, показана в статье (J.Kim et al., AnX-Axis Single - Crystalline Silicon Microgyroscope Fabricated by Exteded SBM Process. Journal of Micromechanical System vol/14N3, June 2005, pp.444-454, fig. 12).
ММГ, в котором осуществляется подстройка резонансной частоты подвеса по оси вторичных колебаний путем подачи напряжений на соответствующие электроды, описан в пат. США №6067858 (см. fig23, колонка 22 описания).
Способ подстройки резонансной частоты подвеса по оси вторичных колебаний в ММГ RR-типа и сам ММГ описаны так же в пат. США №6553833.
Описанный способ заключается в формировании напряжений на электродах, расположенных по оси вторичных колебаний, причем для формирования указанного напряжения формируют два дополнительных сигнала, частоты которых отличаются на величины +Δf и -Δf от F1 частоты, с которой колеблется ПМ. Эти дополнительные сигналы подаются на электроды, расположенные по оси вторичных колебаний, и вызывают колебания ПМ по оси вторичных колебаний соответственно с частотами F1±Δf. Если резонансная частота подвеса по оси вторичных колебаний совпадает с частотой F1, то амплитуды колебаний ПМ на частотах F1±Δf равны, если же, например, резонансная частота подвеса по оси вторичных колебаний выше F1, то амплитуда колебаний ПМ на частоте F1+Δf оказывается больше, чем F1-Δf. Как указано в абзацах 60-65 столбца 4 описания патента, величина Δf может составлять 100 Гц. Далее в соответствии с описанным в патенте способом путем детектирования выделяют амплитуды сигналов этих частот, получаемых на выходе преобразователя емкость-напряжение 2 (см. фиг.3 описания), и в зависимости от разности выделенных амплитуд формируют напряжения. Для подстройки резонансной частоты изменяют величины формируемых напряжений до тех пор, пока амплитуды указанных сигналов не сравняются. Таким образом, подстройка резонансной частоты по описанному способу-прототипу обеспечивается за счет формирования контура автоподстройки частоты по разности амплитуд двух тестовых сигналов.
Аналогичное решение задачи подстройки резонансной частоты вторичных колебаний описано в пат. США №7159461.
В качестве тестового сигнала может быть использована квадратурная помеха, как это предложено в патенте РФ №2308682, в котором для формирования контура автоподстройки частоты используются фазовый детектор и интегратор.
Недостатком этих способов является то, что быстродействие этого контура автоподстройки частоты должно быть достаточно высоким, чтобы подавлять воздействия, вызывающие расстройку резонансных частот. Однако помимо временных и температурных изменений характеристик резонансных подвесов, которые происходят относительно медленно, на резонансную частоту контура вторичных колебаний воздействует измеряемый сигнал, т.е. угловая скорость основания ММГ.
Ранее это влияние не учитывалось. В патентах США №№5992233, 6067858 описано использование отрицательной жесткости для подстройки резонансных частот в ММГ и приведены выражения для оценки величины отрицательной жесткости (ke), которая пропорциональна квадрату отношения постоянного напряжения между электродом и ПМ (Udc) и зазора между ними (у0) (см. формулу (12) патента США №6067858).
Однако, как показывает анализ работы ММГ, величина ke определяется не только отношением квадратов этих величин. Она также зависит от амплитуды вторичных колебаний ПМ и действующего значения переменной составляющей напряжения между электродом, расположенным по оси вторичных колебаний, и ПМ.
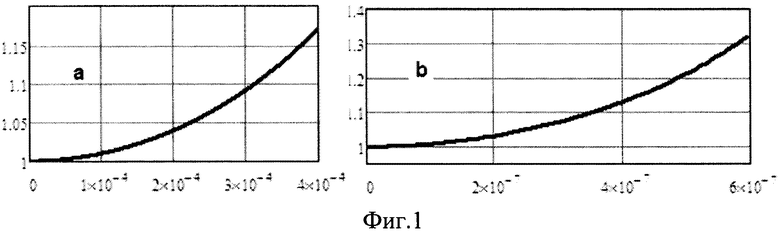
На фиг.1а приведена рассчитанная зависимость изменения относительной величины отрицательной жесткости (kе) ММГ RR-типа, конструкция которого описана в упомянутой выше работе Пешехонова В.Г., от амплитуды угловых колебаний (х) ПМ вокруг оси вторичных колебаний при напряжении между ПМ и электродами, равным 1 В. Расчеты проведены для случая электродов по оси вторичных колебаний, имеющих форму, показанную на фиг.3 этой работы при зазоре между ПМ и электродами 2 мкм. При расчете средняя за период колебаний ПМ величина электрической жесткости для Ci емкости, которая образована ПМ и i-м электродом, определялась из выражения:

при  , где А - амплитуда колебаний ПМ по оси вторичных колебаний, T1 - период первичных колебаний ПМ, Vi - напряжение между ПМ и i-м электродом.
, где А - амплитуда колебаний ПМ по оси вторичных колебаний, T1 - период первичных колебаний ПМ, Vi - напряжение между ПМ и i-м электродом.
Как видно из фиг.1а, величина ke при изменении амплитуды вторичных колебаний ПМ от 0 до 0,0004 радиана изменяется примерно на 20%. При напряжении между ПМ и электродами 2-2,5 В такое изменение kе может приводить к изменению резонансной частоты fp подвеса ротора на величину порядка 1%, что при fp=3 кГц составляет 30 Гц. При больших скоростях изменения измеряемой угловой скорости известные методы подстройки частоты оказываются неэффективными из-за относительно (по сравнению со скоростью изменения измеряемой угловой скорости) низкого быстродействия. Отсутствие эффективных технических решений компенсации, вносимой измеряемым сигналом расстройки резонансных частот, являлось одной из причин того, что до настоящего времени в ММГ режим работы со сведенными частотами практически не используется.
Подобные изменения резонансной частоты подвеса имеют место и ММГ LL-типа. На фиг.1b приведена зависимость относительного изменения kе при изменении амплитуды вторичных колебаний ПМ от 0 до 30% от величины зазора между ПМ и электродом (величины зазора и площадь электродов приняты теми же при расчетах, как и для ММГ RR-типа). Изменения ke и в этом случае оказываются выше 30%, что так же может вызывать изменения резонансной частоты на единицы процентов.
В ММГ компенсационного типа (в них отсутствуют колебания ПМ по оси вторичных колебаний и выходным сигналом является сигнал, пропорциональный амплитуде компенсационного переменного напряжения Vкомп, которое формируется на электродах по оси вторичных колебаний). Это напряжение вызывает изменение величины kе и для его учета достаточно в известной формуле для расчета kе добавить член, равный действующему значению компенсационного напряжения Vкомп,подаваемого на соответствующие электроды:


Таким образом, в ММГ и компенсационного, и разомкнутого типа изменение измеряемой угловой скорости приводит к изменению величины kе и, следовательно, к изменению резонансной частоты подвеса ПМ.
Расстройка резонансных частот в ММГ компенсационного типа проявляется в снижении контурного усиления на частоте первичных колебаний и соответствующем увеличении ошибки при компенсации сил или моментов, обусловленных кориолисовым ускорением.
Расстройка резонансных частот в ММГ разомкнутого типа проявляется в изменении масштабного коэффициента ММГ.
Способ подстройки резонансной частоты подвеса по оси вторичных колебаний в ММГ, в котором используется способ, описанный в пат. США №6067858, принят в качестве прототипа.
В способе-прототипе подстройку резонансной частоты подвеса подвижной массы микромеханического гироскопа осуществляют путем формировании напряжения по крайней мере на одном из электродов, расположенных по оси вторичных колебаний (см. абзац 20 столбца 9 пат. США №6067858, где говорится о напряжении между ПМ 22 и электродом 62). Величина напряжения между указанными элементами, необходимого для настройки в резонанс, может быть определена экспериментально, например, как описано в упомянутой выше статье J.Kim et al. Недостатком способа - прототипа является то, что выполняемая таким образом настройка обеспечивает совпадение резонансных частот или постоянство их расстройки только для одного значения измеряемой угловой скорости, что приводит к ухудшению точности ММГ.
В устройстве-прототипе, в качестве которого выбран ММГ по пат. США №6553833 (см. фиг.3 описания патента №6553833), содержатся ПМ на двухосном резонансном подвесе, первый емкостной датчик перемещения ПМ, образованный электродами, расположенными на оси вторичных колебаний, и первый преобразователь C/U 2 (на фиг.3), входы которого соединены с этими электродами, второй емкостной датчик перемещения ПМ, образованный электродами, расположенными на оси первичных колебаний, и вторым преобразователем C/U 10, входы которого соединены с этими электродами, электроды, расположенные по оси вторичных колебаний, синхронный демодулятор (7), входы которого соединены с выходами преобразователей C/U, при этом выход первого преобразователь C/U через блок подстройки частоты (5) и схему формирования напряжения (9) соединен с электродами, расположенными на оси вторичных колебаний. В этом ММГ выходом является выход демодулятора (7).
Хотя в устройстве - прототипе и используется обратная связь по сигналу датчика перемещения ПМ по оси вторичных колебаний, эта связь не глубокая, а демпфирующая, т.е. уменьшающая амплитуду колебаний ПМ, а не стабилизирующая положение ПМ в центральном положении, как это имеет место при глубокой отрицательной связи в ММГ компенсационного типа. Кроме того, примененная в нем подстройка резонансной частоты требует формирования на электродах дополнительных сигналов, что приводит к возникновению помех и ухудшению точности ММГ. Кроме того, принцип действия канала подстройки резонансной частоты предполагает использование в нем синхронного детектора с фильтром низших частот, что ограничивает быстродействие этого канала и не позволяет обеспечить парирование изменений резонансной частоты подвеса, вызванных быстрыми изменениями измеряемой угловой скорости.
Задачей изобретения является увеличение точности подстройки резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний и повышение за счет этого точности ММГ.
Поставленная задача достигается тем, что определяют расчетным или экспериментальным путем зависимость между величинами выходного сигнала микромеханического гироскопа и величиной напряжения между подвижной массой и электродами канала вторичных колебаний, при которой величина коэффициента отрицательной жесткости остается неизменной, и преобразуют выходной сигнал микромеханического гироскопа в управляющее напряжение между подвижной массой и, по крайней мере, одним из электродов канала вторичных колебаний в соответствии с определенной зависимостью.
При этом, расчетным путем эта зависимость может быть определена при выполнении следующих операций: методом конечных элементов рассчитывают величину емкости Ci между каждым (i-м) электродом, расположенным по оси вторичных колебаний, и ПМ для разных величин (х) смещения ПМ по оси вторичных колебаний, определяют функциональную зависимость Ci(x), например, путем аппроксимации значений Ci для разных величин х, определяют среднюю за период (ω) первичных колебаний ПМ с амплитудой А величину отрицательной жесткости по формуле

где Ui, U0 - соответственно напряжения на i-м электроде и ПМ, а
и полагая, что величина kei постоянна, а по крайней мере величина одного из напряжений Ui может быть изменена, находят зависимость между Ui и А.
А экспериментально эта зависимость может быть определена следующим образом: путем подстройки резонансной частоты подвеса по оси вторичных колебаний на частоту первичных колебаний при неподвижном основании, установки ММГ на вращающееся основание, изменения скорости вращения основания и изменения напряжения Ui по крайней мере на одном из электродов таким образом, чтобы выходной сигнал ММГ (А) достигал максимума, определение зависимости между полученными значениями Ui и А, и преобразуют выходной сигнал микромеханического гироскопа в управляющее напряжение между подвижной массой и, по крайней мере, одним из электродов канала вторичных колебаний в соответствии с определенной зависимостью.
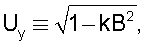
Кроме того, поставленная задача достигается тем, что в ММГ компенсационного типа в качестве управляющего напряжения используют сигнал, пропорциональный амплитуде В компенсирующего напряжения, а управляющее напряжение (Uy) между подвижной массой и электродами канала вторичных колебаний изменяют в соответствии с зависимостью:
Кроме того, поставленная задача достигается тем, что в ММГ разомкнутого типа в качестве управляющего сигнала используют сигнал, пропорциональный выходному сигналу ММГ, а управляющее напряжение (Uy) между подвижной массой и электродами канала вторичных колебаний изменяют в соответствии с квадратичной функцией.
Кроме того, поставленная задача достигается тем, что в микромеханическом гироскопе, содержащем опору на основании, к которой на резонансном подвесе подвешена проводящая подвижная масса, неподвижные электроды, нанесенные на опору или крышку микромеханического гироскопа, гребенчатый двигатель, образованный зубцами статоров, установленных на основание, и зубцами подвижной массы, устройство возбуждения первичных колебаний подвижной массы, выход которого соединен со статорами, последовательно включенные преобразователь емкость - напряжение и устройство преобразования сигнала, при этом входы преобразователя емкость - напряжение соединены с неподвижными электродами, один, по крайней мере, управляемый источник напряжения, выход которого соединен по крайней мере с одним из неподвижных электродов или проводящей подвижной массой, между выходом преобразователя емкость - напряжение и входом управления управляемого источника напряжения введен блок нелинейного преобразования напряжения.
По существу, в предложенных способе и устройстве используется компенсация изменения резонансной частоты подвеса не за счет введения обратной связи по сигналу ошибки, а за счет оценивания возмущения, действующего на резонансный подвес при изменении измеряемой угловой скорости, и управления по этому возмущению.
При реализации предложенного способа подстройки резонансной частоты в качестве сигнала, по которому оценивают возмущение, используют выходной сигнал ММГ или сигналы, амплитуда которых пропорциональна выходному сигналу, в частности амплитуды колебаний ПМ по оси вторичных колебаний или амплитуда компенсирующего напряжения в ММГ компенсационного типа, а напряжение, с помощью которого компенсируют изменения отрицательной жесткости, выделяют из этого сигнала за счет использования устройства нелинейного преобразования электрического сигнала.
Заявленные способ и устройство поясняются чертежами.
На фиг.1 приведены графики относительного изменения коэффициента отрицательной жесткости для ММГ RR-типа (а) и ММГ RR-типа (б) при изменении амплитуды вторичных колебаний ПМ.
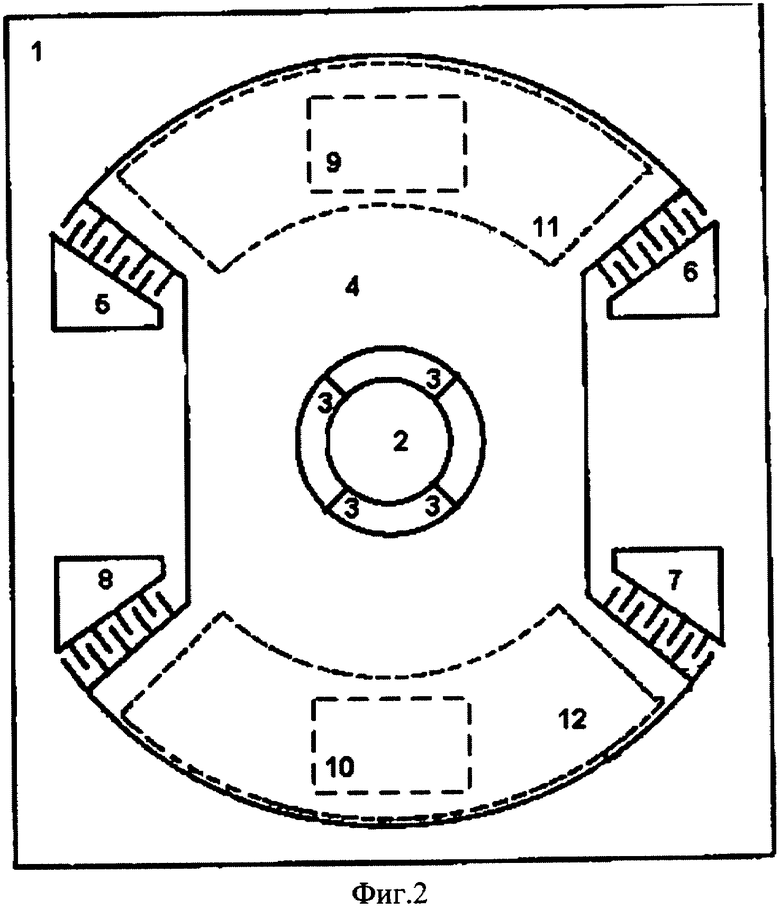
На фиг.2 показана упрощенно микромеханическая часть ММГ RR-типа (реальная конструкция ММГ RR-типа приведена в упомянутой работе Пешехонова В.Г. и др.).
На фиг.2 приняты следующие обозначения:
1 - основание из кремния,
2 - опора,
3 - торсионы,
4 - проводящая подвижная масса (ПМ),
5, 6, 7, 8 - статоры,
9, 10 - первая пара неподвижных электродов, с помощью которых осуществляется подстройка резонансной частоты подвеса ПМ по оси вторичных колебаний,
11, 12 - вторая пара неподвижных электродов.
На фиг.3 приведена блок-схема предложенного ММГ.
На фиг.3 приняты следующие обозначения: элементы 2, 5-12 обозначены так же, как на фиг.2,
13 - источник переменного напряжения,
14, 15 - соответственно первый и второй дифференциальные трансрезистивные усилители,
16, 17, 19 - соответственно первый, второй и третий демодуляторы,
18 - фазовращатель,
20 - интегратор,
21 - перемножитель,
22 - звено сдвига фазы на 90°,
23, 24 - первый и второй соответственно управляемые источники напряжения,
25 - блок нелинейного преобразования напряжения.
Предлагаемый способ заключается в следующем:
Разность резонансных частот подвеса подвижной массы микромеханического гироскопа вибрационного типа, в котором в канале вторичных колебаний используются емкостные датчики с нелинейной зависимостью емкости от перемещения подвижной массы по оси вторичных колебаний, может быть изменена за счет изменения напряжений между подвижной массой и электродами канала вторичных колебаний. Как видно из выражения (1), изменения значений величины интеграла, вызванные изменениями амплитуды колебаний ПМ, могут быть скомпенсированы изменениями величины Vi.
Зависимости, показанные на фиг.1, могут быть аппроксимированы с погрешностью менее 1% квадратичной функцией вида (а0+a1A2). Для сохранения постоянной величину kei при изменении амплитуды вторичных колебаний ПМ до величины Аmax необходимо, чтобы произведение V2 i(a0+a1A2) оставалось постоянным. Например, если напряжение Vi равно сумме (Vi0+Viy), где Vi0=constant, a Viy - изменяемое напряжение, то при
kei оказывается постоянным.
Как показывает числовая оценка для ММГ, описанном в работе Пешехонова, функция Viy(A) может быть аппроксимирована квадратичной функцией с погрешностью менее 1% или линейной с погрешностью на уровне единиц процентов. Таким образом, формируя напряжение на электродах в соответствии с выражением (4) или аппроксимирующей это выражение функцией, может быть обеспечено постоянство kei с погрешностью на уровне единиц процентов и точнее. Выходной сигнал Uвых ММГ разомкнутого типа при постоянной величине kei пропорционален величине А. Таким образом, формируя в соответствии с определенной расчетным путем зависимостью напряжение на электродах от величины выходного сигнала ММГ, может быть обеспечено постоянство величины отрицательной жесткости для всего диапазона амплитуд вторичных колебаний ПМ в ММГ. Замена величины А в выражении (4) на величину Uвых, пропорциональную А, приводит к изменению коэффициента а1, но не меняет вид зависимости (4). С учетом погрешности аппроксимирующих зависимость (4) функций изменение kе может быть уменьшено на 2 порядка (если использовать квадратичную функцию), и, соответственно, расстройка резонансных частот может быть снижена до долей герц во всем диапазоне измеряемых угловых скоростей.
Зависимость между величинами выходного сигнала микромеханического гироскопа и величиной напряжения между подвижной массой и электродами канала вторичных колебаний, при которой величина коэффициента отрицательной жесткости остается неизменной, может быть определена экспериментально. Например, при разных угловых скоростях можно изменять напряжение на электродах, расположенных по оси вторичных колебаний таким образом, чтобы выходной сигнал был максимален. Зависимость изменяемого напряжения от угловой скорости или от максимальной величины выходного сигнала ММГ для заданного значения угловой скорости и будет искомой экспериментально определенной зависимостью. Изменение напряжения на электроде или электродах, расположенных по оси вторичных колебаний, в соответствии с определенной зависимостью от выходного сигнала обеспечивает подстройку резонансной частоты подвеса ПМ по оси вторичных колебаний.
Из выражения (2) видно, что за счет изменения VDC может быть скомпенсировано изменение kе, обусловленное изменением Vкомп, которое является выходным сигналом ММГ компенсационного типа.
Такая компенсация изменения kе может быть выполнена и за счет формирования напряжения на дополнительном электроде, которое обозначено так же, как и в выражении (4) Viy. В этом случае необходимо учитывать влияние напряжений на этих двух электродах. С учетом выражения (2) для расчета kе может быть составлено выражение

Из выражения (5) видно, что величина kе остается неизменной, если  где N - постоянная величина.
где N - постоянная величина.

При N=0, Viy≡Vкомп.
Поскольку амплитуда Vкомп пропорциональна выходному сигналу компенсационного ММГ (напряжение Vкомп в этом ММГ демодулируется для получения выходного сигнала, который обозначим В), то выражение (6) может быть представлено (при замене Viy на Uy) в виде:
 где k - постоянный коэффициент.
где k - постоянный коэффициент.
Таким образом, и в ММГ компенсационного типа достигается компенсация влияния на kе выходного сигнала за счет формирования напряжения на электродах ММГ, зависящего от выходного сигнала. За счет этой компенсации достигается подстройка резонансной частоты подвеса ПМ по оси вторичных колебаний.
На фиг.2 ПМ 4 подвешена с помощью торсионов 3 к опоре 2, которая установлена на основании 1. Статоры 5-8 установлены на основании 1, с боковых сторон они имеют зубцы. Соответственно и ПМ 4 имеет на боковых поверхностях, обращенных к статорам, зубцы. Зубцы статоров 5-8 с зубцами ПМ 4 образуют гребенчатую электродную структуру, позволяющую формировать емкостные датчики угла и момента.
На фиг.3 статоры 5, 6 являются электродами гребенчатого двигателя, а статоры 7, 8 являются электродами емкостного датчика угла ПМ 4, с помощью которого определяется угол поворота ПМ 4 вокруг оси первичных колебаний. Электроды 9, 10 используются для подстройки резонансной частоты подвеса ПМ 4 по оси вторичных колебаний. Электроды 11, 12 используются в ММГ для измерения угла поворота ПМ 4 вокруг оси вторичных колебаний.
Двухфазный источник переменного напряжения одним выходом соединен с опорой 2, а вторым - с входами для опорного сигнала демодуляторов 16, 17. Статоры 7, 8 соединены с входами дифференциального трансрезистивного усилителя 14, выход которого соединен с входом демодулятора 16. Электроды 11, 12 соединены с входами дифференциального трансрезистивного усилителя 15, выход которого соединен с входом демодулятора 17. Выход демодулятора 17 соединен с входом демодулятора 19, другой вход которого соединен с выходом фазовращателя 18. Выход демодулятора 16 соединен с входом фазовращателя 18 и входами интегратора 20 и схемы автоматического регулирования усиления (АРУ). Выходы элементов 20 и 22 соединены с входами перемножителя 21, парафазные выходы которого соединены со статорами 5, 6. Выходы управляемых источников напряжения соединены с электродами 9, 10, а их входы соединены с выходом блока нелинейного преобразования напряжения 25. Вход блока 25 соединен с выходом демодулятора 19.
Предлагаемый ММГ работает следующим образом. Переменное напряжение частотой порядка сотен килогерц источника 35 поступает к опоре 2 и через проводящие торсионы 3, которые, как и элементы 2, 4, 5-8, выполнены из легированного кремния, на статоры 5-8. Гребенчатые электродные структуры, образованные зубцами статоров и ПМ 4, использованы в ММГ для формирования емкостного датчика угла (статоры 7, 8) и гребенчатого двигателя или датчика момента (статоры 5, 6). Токи, проходящие от источника 35 через статоры 7, 8, поступают на входы дифференциального трансрезистивного усилителя 14, амплитуда выходного напряжения которого оказывается пропорциональным углу поворота ПМ 4 вокруг оси первичных колебаний. Это напряжение демодулятором 16 преобразуется в сигнал постоянного тока. Это напряжение с помощью элементов 20-22 преобразуется в сигнал управления гребенчатым двигателем, который поступает к статорам 5, 6. Элементы 2-8, 16, 20-22 образуют микромеханический автогенератор, работа которого подробно описана в литературе, например, в работе [Пешехонов и др. Результаты разработки микромеханического гироскопа. XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, 23-25 мая 2005 г., стр.268-274].
Токи, протекающие через электроды 11, 12, поступают на входы дифференциального трансрезистивного усилителя 15, амплитуда выходного напряжения которого оказывается примерно пропорциональной углу поворота ПМ 4 вокруг оси вторичных колебаний. Это напряжение демодулятором 17 преобразуется в сигнал постоянного тока. С помощью элемента 18 осуществляется подстройка фазы выходного напряжения демодулятора 16 на максимальное подавление квадратурной помехи ММГ демодулятором 19 и выделение им выходного сигнала ММГ. Необходимая расстройка между резонансными частотами подвеса в ММГ осуществляется с помощью напряжений источников напряжения 23, 24, которое поступает на электроды 9, 10. Электроды 9-12 в аналоге ММГ (см. работу Пешехонов и др.) расположены на крышке ММГ. Емкости, образованные электродами 9-12 и ПМ 4, нелинейно зависят от угла поворота (x) ПМ 4 вокруг оси вторичных колебаний. При этом вторая производная этих зависимостей по переменной x не равна нулю. Поэтому kе пар электродов 9-12 и ПМ 4 не равна нулю и зависит как от амплитуды колебаний ПМ 4 по оси вторичных колебаний, так и напряжений между ПМ 4 и электродами. В ММГ, приведенном на фиг.3, напряжение источников 23, 24 изменяется блоком 25 в зависимости от величины выходного сигнала ММГ. Как показано выше, если блок реализует зависимость в правой части выражения 4, то это обеспечивает независимость kе от амплитуды вторичных колебаний ПМ 4. Разные аппроксимирующие функции в зависимости от требуемой погрешности ММГ могут быть применены. Блок может быть реализован разными средствами, в том числе и с использованием цифровой и аналоговой техники.
Предложенный способ подстройки разности резонансных частот подвеса подвижной массы может быть использован в ММГ другого типа, например, LL-типа, с другим числом электродов по оси вторичных колебаний без изменения сути изобретения.
Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа. Сущность изобретения: определяют расчетным или экспериментальным путем зависимость между величинами выходного сигнала В ММГ и величиной напряжения между подвижной массой и электродами канала вторичных колебаний, при которой величина отрицательной жесткости остается неизменной, и преобразуют выходной сигнал микромеханического гироскопа в управляющее напряжение Uу между подвижной массой и, по крайней мере, одним из электродов канала вторичных колебаний в соответствии с определенной зависимостью, в качестве которой можно использовать квадратичную зависимость в случае ММГ разомкнутого типа или зависимость вида  (k-постоянный коэффициент) в случае ММГ компенсационного типа. В ММГ для этого между выходом преобразователя емкость-напряжение в канале вторичных колебаний и входом управления источника напряжения, соединенного, по крайней мере, с одним из электродов канала вторичных колебаний, введен блок нелинейного преобразования напряжения. Повышение точности достигается использованием компенсации изменения резонансной частоты подвеса за счет оценивания возмущения, действующего на резонансный подвес при изменении измеряемой угловой скорости и формирования напряжения на электродах, компенсирующего это возмущение. 2 н. и 2 з.п. ф-лы, 3 ил.
(k-постоянный коэффициент) в случае ММГ компенсационного типа. В ММГ для этого между выходом преобразователя емкость-напряжение в канале вторичных колебаний и входом управления источника напряжения, соединенного, по крайней мере, с одним из электродов канала вторичных колебаний, введен блок нелинейного преобразования напряжения. Повышение точности достигается использованием компенсации изменения резонансной частоты подвеса за счет оценивания возмущения, действующего на резонансный подвес при изменении измеряемой угловой скорости и формирования напряжения на электродах, компенсирующего это возмущение. 2 н. и 2 з.п. ф-лы, 3 ил.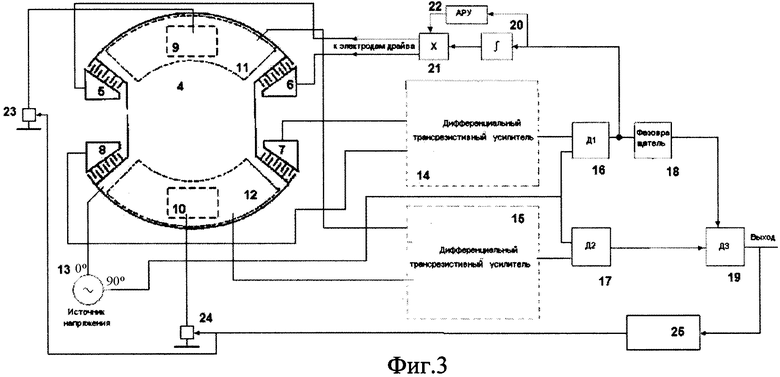
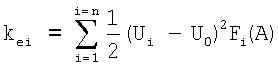
где Ui, U0 - соответственно напряжения на i-м электроде и ПМ, a 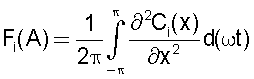 и полагая, что величина kei постоянна, а, по крайней мере, величина одного из напряжений Ui может быть изменена, находят зависимость между Ui и А, или экспериментальным путем, например путем подстройки резонансной частоты подвеса по оси вторичных колебаний на частоту первичных колебаний при неподвижном основании, установки ММГ на вращающееся основание, изменения скорости вращения основания и изменения напряжения Ui, по крайней мере, на одном из электродов таким образом, чтобы выходной сигнал ММГ ПМ или амплитуда колебаний по оси вторичных колебаний А достигали максимума, определения зависимости между полученными значениями Ui и А, и преобразуют выходной сигнал микромеханического гироскопа в управляющее напряжение между подвижной массой и, по крайней мере, одним из электродов канала вторичных колебаний в соответствии с определенной зависимостью.
и полагая, что величина kei постоянна, а, по крайней мере, величина одного из напряжений Ui может быть изменена, находят зависимость между Ui и А, или экспериментальным путем, например путем подстройки резонансной частоты подвеса по оси вторичных колебаний на частоту первичных колебаний при неподвижном основании, установки ММГ на вращающееся основание, изменения скорости вращения основания и изменения напряжения Ui, по крайней мере, на одном из электродов таким образом, чтобы выходной сигнал ММГ ПМ или амплитуда колебаний по оси вторичных колебаний А достигали максимума, определения зависимости между полученными значениями Ui и А, и преобразуют выходной сигнал микромеханического гироскопа в управляющее напряжение между подвижной массой и, по крайней мере, одним из электродов канала вторичных колебаний в соответствии с определенной зависимостью.
где k - постоянный коэффициент.
| US 6067858 А, 30.05.2000 | |||
| US 6553833 B1, 29.04.2003 | |||
| ПЕШЕХОНОВ В.Г | |||
| и др | |||
| Результаты разработки микромеханического гироскопа | |||
| XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, 23-25 мая 2005, с.268-274 | |||
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2308682C1 |
| JP 2007187606 А, 26.07.2007 | |||
| JP 2000028364 A, 28.01.2000 | |||
| JP 2000105125 A, 11.04.2000. | |||

