Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа и схемам измерения передвижения подвижной массы (ПМ) или ротора в этих гироскопах.
Известен способ измерения перемещений ПМ по оси первичных колебаний или драйва (drive axis), заключающийся в измерении выходного сигнала емкостного датчика, расположенного по этой оси [Пат. США №6253612, Распопов В.Я. Микромеханические приборы, Тула, 2002 г. стр.323]. Этот измеренный сигнал используется в гироскопах для формирования контура возбуждения колебаний в канале драйва (гребенчатого двигателя по оси возбуждения колебаний) и стабилизации амплитуды этих колебаний, а также как опорный сигнал при выделении сигнала, пропорционального измеряемой скорости вращения. При этом фаза опорного сигнала в зависимости от разности резонансных частот подвеса ПМ по осям первичных и вторичных колебаний может составлять от 90° при большой разности этих частот до 0° при совпадении этих частот. Требуемый сдвиг фазы может быть получен известными способами, например, за счет использования фазосдвигающих RC цепей.
Пример использования сигнала датчика перемещений на оси драйва для возбуждения первичных колебаний и выделения сигнала, обусловленного действием кориолисового ускорения приведен в [Пешехонов и др. Результаты разработки микромеханического гироскопа. XII Санкт-Петербургская международная конференция по интегрированным навигационным системам 23-25 мая 2005 г. стр.268-274, рис.6].
Для формирования датчика перемещений на подвижной массе и основании формируют соответствующие электроды и вводят электронные блоки. Примеры реализации конструкции гироскопа можно найти в пат. США №6253612 фиг.2, 3. Для измерения перемещений ПМ по другим осям размещают емкостные датчики по ним (см. пат. США №6253612 абзац 51).
Такой подход является общепринятым. В качестве примера можно обратиться к пат. США №5604309, где на фиг.5 показаны емкостные датчики, расположенные по ортогональным осям (ось драйва и ось вторичных колебаний или выходная ось).
Таким образом, датчик перемещения ПМ по оси первичных колебаний используется как источник сигнала, фаза которого постоянна относительно фазы колебаний ПМ по оси первичных колебаний, а амплитуда пропорциональна амплитуде колебаний ПМ по оси первичных колебаний.
Отметим явление, которое, как правило, присуще ММГ: наличие в выходном сигнале (т.е. в сигнале емкостного датчика, расположенного по выходной оси) квадратурной помехи. Амплитуда этой помехи на 3-4 порядка превышает порог чувствительности ММГ, т.е. эта составляющая является превалирующей и для многих конструкций ММГ может считаться основной в составе выходного сигнала емкостного датчика, расположенного на оси вторичных колебаний. Благодаря тому что эта составляющая сдвинута на 90° по отношению к полезной, определяемой кориолисовыми ускорениями, имеется возможность подавления квадратурной помехи и сведения ее к нулевому уровню.
Природа квадратурной помехи достаточно ясно объяснена в [Пат. США №6370937]. В [Пат. США №№5604309, 6370937, 5604306] описаны возможные пути построения ММГ, в котором эта помеха подавляется.
Исключение одного емкостного датчика из ММГ могло бы упростить конструкции ММГ. Поэтому формирование сигнала, фаза которого стабильна по отношению к перемещениям ПМ по оси первичных колебаний без использования емкостного датчика перемещений ПМ, позволит упростить конструкцию и снизить стоимость ММГ.
В качестве прототипа выбран способ формирования сигнала перемещения ПМ, заключающийся в измерении выходного сигнала емкостного датчика, размещенного по оси драйва, и его фильтрации с помощью системы ФАПЧ, описанный в [Пат. США №6253612].
Задачей изобретения является формирование из сигнала емкостного датчика, расположенного на оси вторичных колебаний (выходной оси), сигнала, фаза которого имеет постоянный сдвиг относительно фазы колебаний ПМ по оси драйва, и сигнала, величина которого пропорциональна амплитуде первичных колебаний. При реализации этой задачи возможно упрощение конструкции ММГ за счет исключения из ММГ датчика перемещения ПМ по оси драйва и снижение стоимости ММГ.
Дополнительной задачей изобретения является увеличение амплитуды колебаний ПМ или снижение амплитуды напряжения, подаваемого на гребенчатый двигатель, за счет увеличения в этом двигателе числа гребенок, которые используются в аналогах для формирования датчика перемещения.
Поставленная задача достигается тем, что измеряют сигнал емкостного датчика образованного ПМ и электродами, расположенными по оси измерения выходного сигнала гироскопа, формируют первый дополнительный сигнал путем фильтрации измеренного сигнала с помощью системы ФАПЧ и второй дополнительный сигнал путем демодуляции измеренного сигнала.
Кроме того, поставленная задача достигается тем, что для демодуляции измеренного сигнала перемножают его с третьим сигналом, который получают путем сдвига первого дополнительного сигнала на 90°.
Основное преимущество предлагаемого изобретения обусловлено тем, что как положение ПМ в плоскости первичных колебаний, так и перемещения по выходной координате (или в плоскости вторичных колебаний) определяют путем измерения сигнала одного емкостного датчика, используя квадратурную (по отношению к сигналу кориолисовых ускорений) помеху в качестве полезного сигнала, из которой в соответствии с предложенным способом осуществляют реконструкцию сигнала, получаемого в прототипе и аналогах с помощью емкостного датчика в канале драйва.
Заявленная совокупность признаков позволяет упростить конструкцию механической части гироскопа, увеличить амплитуду первичных колебаний, уменьшить управляющее напряжение на гребенчатом двигателе.
Заявленное устройство поясняется чертежами.
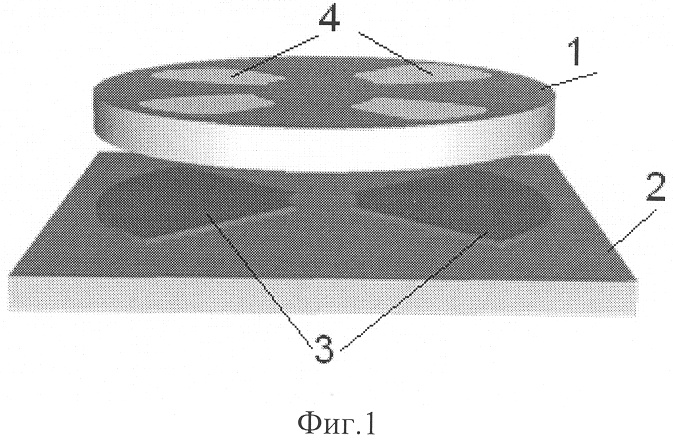
На фиг.1 приведен вариант конструкции ММГ.
На фиг.1 приняты следующие обозначения:
1 - ПМ (в данном варианте конструкции - ротор),
2 - основание,
3 - электроды, расположенные в плоскости вторичных колебаний на основании 2,
4 - электроды, расположенные в плоскости первичных колебаний.
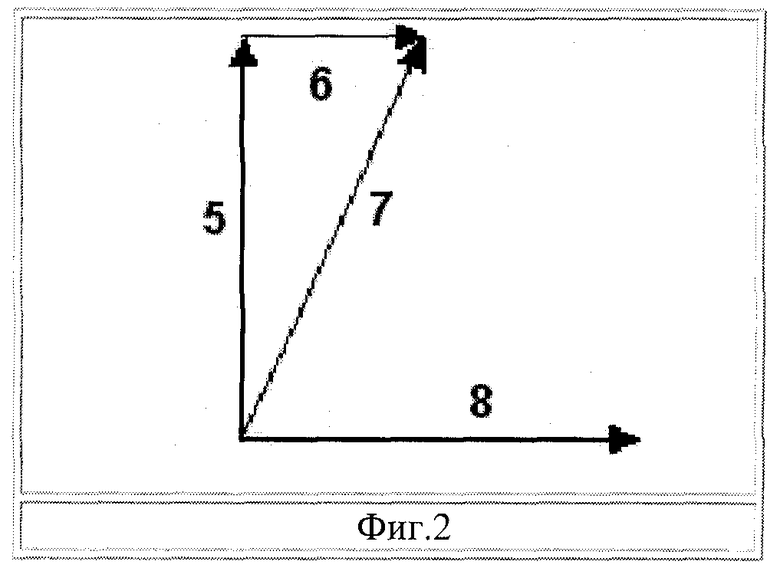
На фиг.2 показан в векторной форме выходной сигнал емкостного датчика образованного подвижной массой и электродами, расположенными по оси измерения выходного сигнала гироскопа, и его разложение на две ортогональные составляющие.
На фиг.2 приняты следующие обозначения:
5 - вектор, соответствующий квадратурной составляющей выходного сигнала,
6 - вектор, соответствующий составляющей выходного сигнала, пропорциональной действующим на гироскоп кориолисовым ускорениям,
7 - результирующий вектор выходного сигнала,
8 - вектор сигнала на выходе системы ФАПЧ 10.
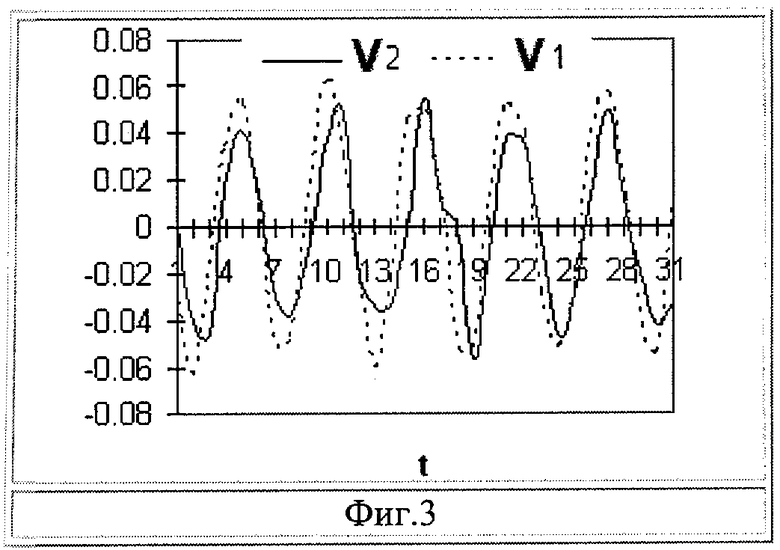
На фиг.3 приведены графики изменения во времени выходных сигналов двух емкостных датчиков ММГ, конструкция которого аналогична описанной в свид. РФ на полезную модель №18768. Эти графики получены экспериментально.
На фиг.3 приняты следующие обозначения:
t - время,
V1 - напряжение на выходе емкостного датчика канала драйва,
V2 - напряжение на выходе емкостного датчика выходного канала (т.е. образованного ПМ1 и электродами 3).
На фиг.4 показана блок-схема, иллюстрирующая предложенный способ определения положения ротора микромеханического гироскопа по оси возбуждения первичных колебаний, который позволяет выделить сигнал, пропорциональный амплитуде перемещения ПМ в плоскости первичных колебаний, и сформировать сигнал, имеющий фиксированный сдвиг фазы относительно перемещений ПМ в этой плоскости.
На фиг.4 приняты следующие обозначения:
9 - емкостный датчик,
10 - система ФАПЧ,
11 - демодулятор,
12 - умножитель,
13 - фильтр низкой частоты (ФНЧ).
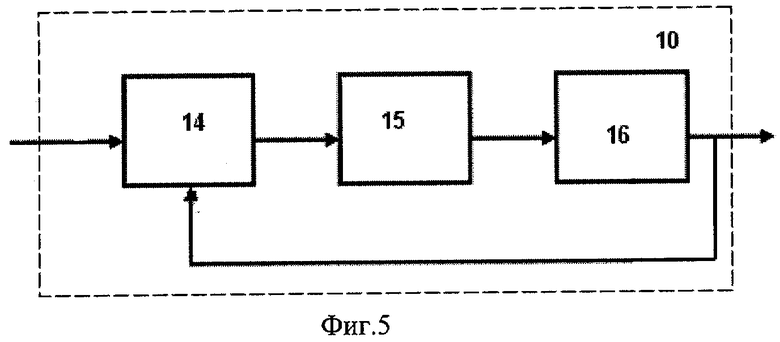
На фиг.5 показана блок-схема варианта построения ФАПЧ.
На фиг.5 приняты следующие обозначения:
14 - фазовый детектор,
15 - второй ФНЧ,
16 - генератор, управляемый напряжением (ГУН).
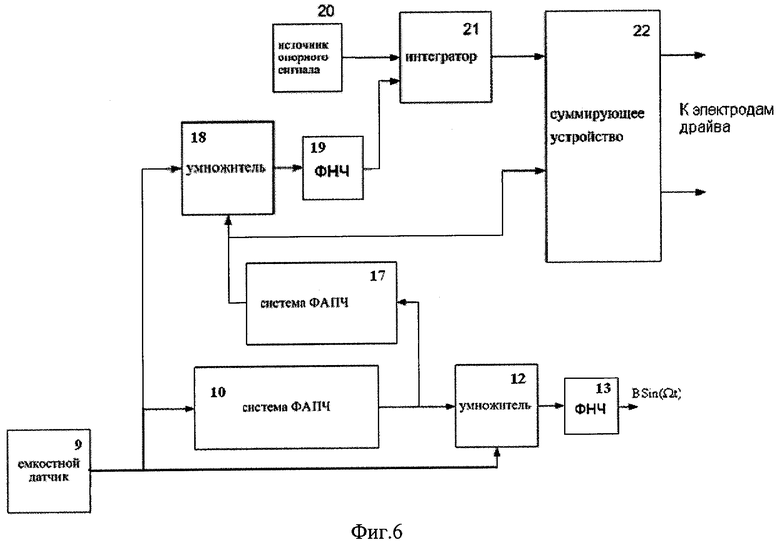
На фиг.6 показана блок-схема варианта построения устройства управления гребенчатым двигателем и выделения сигнала об угловой скорости в ММГ, в котором реализован предлагаемый способ.
На фиг.6 приняты следующие обозначения:
9, 10, 12, 13 - элементы, аналогичные элементам на фиг.4,
17 - вторая система ФАПЧ,
18 - второй умножитель,
19 - третий ФНЧ,
20 - источник опорного сигнала,
21 - интегратор,
22 - суммирующее устройство.
Предлагаемый способ заключается в следующем.
В ММГ (см. фиг.1) ПМ 1 подвешена на упругом подвесе над основанием 2, электроды 3 с ПМ 1 образуют емкостный датчик перемещения ПМ 1 по оси вторичных колебаний (выходной канал). Для возбуждения колебаний ПМ 1 в плоскости, параллельной основанию, на электроды 4 может подаваться постоянное и переменное напряжения. Частота последнего в этом случае выбирается равной резонансной частоте подвеса ПМ 1.
Положение ПМ 1 при колебаниях в плоскости, параллельной основанию, изменяется в соответствие с выражением

где А - амплитуда колебаний, ω - угловая частота колебаний (ω как правило совпадает с резонансной частотой подвеса ПМ1).
В ММГ-аналогах сигнал на выходе емкостного датчика в канале драйва пропорционален величине φ.
В реальных конструкциях ММГ ПМ 1 совершает колебания не только в плоскости, параллельной основанию 2, но и в направлении, нормальном к этой плоскости. Это обусловлено влиянием ряда факторов, в частности неравножесткостью торсионов, нормальными к ПМ 1 составляющими электростатического поля. Все это, в конечном счете, приводит к тому, что в выходном сигнале емкостного датчика, построенного на электродах 3, присутствует составляющая 5 (см. фиг.2), которая в общем случае зависит от φ.
Экспериментальная проверка на образцах ММГ показала, что эта зависимость близка к линейной. Как видно из фиг.3, фазы выходных сигналов емкостных датчиков (напряжения V1, V2) практически совпадают. Был поставлен эксперимент, в котором измерялись выходные сигналы V1, V2 при работе ММГ на "выбеге", т.е. когда после возбуждения первичных колебаний отключалось напряжение возбуждения от гребенчатого двигателя. Отношение амплитуд V1/V2 в этом эксперименте оставалось постоянным.
Если допустить, что угол поворота ММГ вокруг оси чувствительности θ изменяется в соответствии с выражением:

то под действием кориолисовых сил ПМ1 будет совершать колебательные движения, которые можно описать с помощью выражения:

величина, пропорциональная ν, соответствует вектору 6 на фиг.2.
Как видно из фиг.2, фаза вектора 7 по отношению к вектору 5 изменяется с частотой Ω.
При достаточно большой величине вектора 5 по сравнению с вектором 6 (т.е. для случая, когда квадратурная помеха значительно превосходит полезный сигнал), амплитудное значение вектора 5 может быть получено путем демодулирования выходного сигнала датчика 9. Простейшим способом демодуляции сигнала является выпрямление переменного напряжения, которое может выполняться известными схемами выпрямителя 11, на выходе которого выделяется сигнал U2, пропорциональный величине вектора 7.
Известным методом фильтрации сигнала, модулированного по фазе, является использование системы ФАПЧ, например элемента 10 на фиг.4. Система ФАПЧ может быть реализована по известной структуре, приведенной на фиг.5, в которой последовательно соединены фазовый детектор 14, второй ФНЧ 15 и ГУН 16, при этом выход ГУН соединен с одним из входов фазового детектора 14, другой вход которого является входом для внешнего сигнала. При достаточно высокой по сравнению с частотой среза второго ФНЧ 15 частотой Ω система ФАПЧ 10 подавляет изменения фазы входного сигнала системы ФАПЧ (изменения угла между векторами 7 и 5), и на выходе система ФАПЧ 10 выделяется сигнал U1, фаза которого сдвинута на 90° относительно квадратуры (вектор 8 на фиг.3).
Таким образом, предложенный метод позволяет из сигнала емкостного датчика, образованного подвижной массой и электродами, расположенными по оси измерения выходного сигнала гироскопа, сформировать первый дополнительный сигнал (U1) путем фильтрации измеренного сигнала с помощью системы ФАПЧ и второй дополнительный сигнал (U2) путем демодуляции измеренного сигнала.
Наличие этих сигналов позволяет выделить сигнал θ (которому пропорциональна величина вектора 6) известным методом: синхронным детектированием, реализуемым, например, с помощью последовательно включенных умножителя 12 и ФНЧ 13. При этом входы умножителя соединены с выходами системы ФАПЧ 10 и датчика 9.
Как известно, среднее значение произведения ортогональных сигналов равно нулю, поэтому при перемножении сигналов, которым соответствуют вектора 7, 8, составляющая, соответствующая вектору 5, будет подавляться, а составляющая, соответствующая вектору 6, будет выделяться после фильтрации.
Элементы, показанные на фиг.6 соединены следующим образом: элементы 9, 10, 12, 13 соединены, как показано на фиг.4, вторая система ФАПЧ 17 соединена входом с выходом системы ФАПЧ 10 и выходом с одним из входов второго умножителя 18, другой вход которого соединен с выходом датчика 9. С входом интегратора 21 соединены выход источника опорного сигнала 20 и выход второго умножителя 18 через третий ФНЧ 19. Выходы интегратора 21 и второй системы ФАПЧ 17 соединены с входами суммирующего устройства 22, выходы которого соединены с электродами гребенчатого двигателя ММГ.
В схеме на фиг.6 с помощью второй системы ФАПЧ 17 получают третий сигнал, который сдвинут на 90° относительно напряжения U1, а значит синфазного (или противофазного) с квадратурной помехой (вектор 5). При перемножении третьего сигнала и выходного сигнала датчика 9 и дальнейшей фильтрации этого произведения третьим ФНЧ 19 составляющая, обусловленная сигналом v подавляется и на выходе ФНЧ 19 остается сигнал, пропорциональный величине А (см. выражение (1)).
Этот выделенный сигнал на входе элемента 21 сравнивается с опорным сигналом на выходе источника 20 и после интегрирования поступает на вход сумматора 22. Сдвиг на 90° выходного сигнала элемента 9 обеспечивает необходимый для возбуждения колебаний фазовый сдвиг в контуре.
Напряжение на выходе сумматора 22 (U22)

где K - коэффициент.
Поскольку сила (F) или момент, развиваемый гребенчатым двигателем, пропорционален квадрату напряжения, подаваемому на электроды, то

где к - коэффициент.
Учитывая только составляющую на частоте ω, получим, что F пропорционально величине U21Asin(ωt), т.е. контурное усиление в контуре стабилизации амплитуды зависит от интеграла разности задаваемого значения амплитуды (сигнал на выходе элемента 21 и его текущего значения). Таким образом, при наличии одного емкостного датчика 9 возможна стабилизация амплитуды колебаний ПМ1 в канале драйва. Подавление квадратурной помехи и выделение сигнала θ в ММГ, реализующим предложенный способ, может быть осуществлено с помощью первого дополнительного сигнала, как это было описано ранее.
Возможность реализации предложенного способа определения положения ротора микромеханического гироскопа по оси возбуждения первичных колебаний и применения выделяемых в соответствии с предложенным способом сигналов для возбуждения первичных колебаний и измерения угловой скорости подтверждены моделированием и экспериментами, проведенными на экспериментальном образце ММГ и виртуальным преобразователем сигнала емкостного датчика, выполненным в программе Lab View.

Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа. Способ заключается в измерении выходного сигнала емкостного датчика, образованного подвижной массой и электродами, расположенными по оси измерения выходного сигнала гироскопа, формировании первого дополнительного сигнала путем фильтрации измеренного сигнала с помощью системы фазовой автоподстройки частоты и второго дополнительного сигнала, который получают перемножением измеренного сигнала с сигналом, полученным путем сдвига первого дополнительного сигнала на 90°, и выделении низкочастотной составляющей полученного произведения с помощью фильтра низкой частоты. Способ определения положения подвижной массы позволяет по сигналу емкостного датчика, расположенного на выходной оси микромеханического гироскопа (ММГ) с большой величиной квадратурной помехи, сформировать сигнал, имеющий постоянный фазовый сдвиг относительно перемещений ротора по оси возбуждения первичных колебаний. 6 ил.
Способ определения положения подвижной массы микромеханического гироскопа по оси возбуждения первичных колебаний в микромеханическом гироскопе с квадратурной помехой, заключающийся в измерении выходного сигнала емкостного датчика, отличающийся тем, что измеряют сигнал емкостного датчика, образованного подвижной массой и электродами, расположенными по оси измерения выходного сигнала гироскопа, формируют первый дополнительный сигнал путем фильтрации измеренного сигнала с помощью системы фазовой автоподстройки частоты, с помощью которого выделяется сигнал, определяющий угол поворота гироскопа вокруг оси чувствительности, и второй дополнительный сигнал, который получают путем перемножения измеренного сигнала с сигналом, который получают путем сдвига первого дополнительного сигнала на 90°, и выделяют низкочастотную составляющую полученного произведения с помощью фильтра низкой частоты, пропорциональную амплитуде колебаний подвижной массы.
| US 6253612 B1, 03.07.2001 | |||
| ПЕШЕХОНОВ В.Г | |||
| и др | |||
| Результаты разработки микромеханического гироскопа | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| US 6370937 В2, 16.04.2002 | |||
| US 5604309 А, 18.02.1997 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2000 |
|
RU2178548C1 |

