Данное изобретение относится к гироскопам вибрационного типа, измеряющим угловую скорость основания, в частности к микромеханическим гироскопам (ММГ), в которых под действием электростатических сил, создаваемых гребенчатым двигателем, подвижная масса (ПМ), подвешенная на двухосном резонансном подвесе, совершает первичные колебания. При появлении угловой скорости основания на ПМ действует момент Кориолиса, в результате чего ПМ совершает вторичные колебания на той же частоте с амплитудой, пропорциональной скорости основания [В.Г. Пешехонов и др. Результаты разработки микромеханического гироскопа. В кн.: XII Санкт-Петербургская международная конференция по интегрированным навигационным системам 23-25 мая 2005 г., стр.268-274, рис.1].
Упрощенное уравнение движения, описывающее вторичные колебания ПМ, записывается в виде [см. В.Я.Распопов. Микромеханические приборы. Учебное пособие. Тул. гос. университет, г.Тула, 2004 г., 382 стр.]:

где mx, х - масса и перемещение ПМ по оси вторичных колебаний х, сx, kx - коэффициенты демпфирования и жесткости подвеса ПМ по оси х; Ωz - угловая скорость основания, у - перемещение ПМ по оси первичных колебаний у.
Уравнение (1) описывает динамику идеального ММГ. Из-за технологических погрешностей изготовления чувствительного элемента, для описания вторичных колебаний реального ММГ используется уравнение [см. A.Sricantha Phani, and Ashwin A Seshia Identificaton of Anisoelasticity and Nonproportional Damping in MEMS Gyroscopes, NSTI-Nanotech 2004, Vol.2, pp.343-346]:

где cxy, kxy - коэффициенты перекрестных демпфирования и жесткости подвеса. Наличие этих коэффициентов в уравнении (2) свидетельствует о том, что ПМ на неподвижном основании кроме первичных колебаний по оси у, совершает колебания по оси х, которые вносят ошибку в работу ММГ. Необходимо отметить, это сложные колебания, представляющие собой сумму двух колебаний различной природы возникновения. Первая составляющая этих колебаний, обусловленная наличием cxy, синфазна колебаниям, вызванным действием на ПМ момента Кориолиса при появлении угловой скорости основания. Вторая составляющая синфазна первичным колебаниям и, следовательно, на 90 градусов сдвинута по отношению к колебаниям, вызванным моментом Кориолиса. Присутствие этих колебаний вызывает нестабильность масштабного коэффициента и дрейф нуля, уменьшает динамический диапазон ММГ [Т.А.Андреева, Я.В.Беляев. Исследование влияния квадратурной помехи на работу микромеханического гироскопа. // Навигация и управление движением. - Материалы VIII конференции молодых ученых, 2007]. Такие ММГ обладают невысокой чувствительностью, так как работают с малым механическим коэффициентом усиления, значительное увеличение которого из-за наличия описанных выше колебаний приведет к большим нелинейностям.
Таким образом, в ММГ необходимо подавлять нежелательные колебания ПМ по оси вторичных колебаний. Для чего необходимо точно определять перекрестные коэффициенты подвеса cxy и kxy.
Известен способ определения коэффициентов cxy и kxy, заключающийся в измерении матрицы амплитудно-частотной характеристики за счет возбуждения ПМ вдоль одной из степеней свободы и измерении ее реакции вдоль другой степени свободы [см. А.Srikantha Phani, and Ashwin A Seshia Identification of Anisoelasticity and Nonproportional Damping in MEMS Gyroscopes, NSTI-Nanotech 2004, Vol.2, pp.343-346].
Недостатками этого способа являются: сложность точного измерения амплитудно-частотной характеристики ММГ, так как это высокодобротное резонансное звено, резонансная частота которого может изменяться от внешних факторов, громоздкие математические вычисления, основанные на измеренных значениях матрицы амплитудно-частотной характеристики, при ошибочных измерениях которой будет накапливаться погрешность определения коэффициентов сxy и kxy, в результате чего колебания, обусловленные этими коэффициентами, будут скомпенсированы неточно.
Известен еще один способ определения коэффициента перекрестной жесткости kxy, в основе которого лежит выражение А-8 [см. пат. США №US 6,571,630 В1]. Недостатком этого способа является то, что в выражение А-8 входит неизвестный, трудно измеримый параметр γ - угол отклонения реальной оси х от своего номинального положения, величина которого принимает значения порядка 1·10-4 рад.
В качестве прототипа выбрано устройство, описанное в пат. РФ №2301970 С1, содержащее подвижный механический элемент, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, последовательно соединенные усилитель и дифференцирующее звено, включенные между парами электродов по оси вторичных колебаний, последовательно соединенные фазовращательное звено и демодулятор, при этом вход фазовращательного звена подключен к выходу емкостного датчика по оси первичных колебаний, устройство подавления квадратуры, подключенное между выходом дифференцирующего звена и входом демодулятора, второй вход которого подключен к выходу емкостного датчика по оси первичных колебаний.
Недостатком прототипа является то, что это устройство позволяет лишь косвенно оценить величину коэффициента kxy, наличие которого вызывает колебания ПМ на неподвижном основании вокруг оси вторичных колебаний, синфазные первичным колебаниям ПМ, при этом, не учитывает колебания ПМ, обусловленных наличием коэффициента cxy, а, следовательно, компенсация колебаний осуществляется не полностью и существенно повысить точность ММГ не удастся.
Кроме того, недостатком прототипа является сложность обеспечения устойчивой работы ММГ компенсационного типа.
Задачей изобретения является повышение точности определения коэффициентов cxy и kxy с целью увеличения чувствительности ММГ.
Поставленная задача достигается тем, что для определения перекрестных коэффициентов жесткости и демпфирования подвеса ММГ, заключающегося в измерении сигналов, пропорциональных углам отклонения подвижной массы вокруг осей первичных и вторичных колебаний, и формировании момента, компенсирующего колебания подвижной массы вокруг оси вторичных колебаний на неподвижном основании, дополнительно на электродах датчика момента, расположенных по оси вторичных колебаний, формируется сумма двух переменных напряжений с различными амплитудами, первое из которых синфазно сигналу, пропорциональному углу отклонения подвижной массы вокруг оси первичных колебаний, а второе ортогонально первому, и коэффициенты перекрестных жесткости и демпфирования подвеса определяются соответственно отношением величин составляющих момента, обусловленных действием этих переменных напряжений, к измеренной амплитуде первичных колебаний и к рассчитанной величине скорости этих колебаний.
Кроме того, поставленная задача в микромеханическом гироскопе для реализации предложенного способа достигается тем, что между парами электродов по оси вторичных колебаний введено устройство формирования переменного напряжения в виде суммы напряжений с различными амплитудами и сдвинутыми друг относительно друга на 90 градусов.
Кроме того, поставленная задача достигается тем, что в микромеханическом гироскопе устройство формирования переменного напряжения выполнено в виде последовательно соединенных первого умножителя, усилителя, фильтра низкой частоты, второго умножителя, последовательно соединенных третьего умножителя, усилителя, фильтра низкой частоты, четвертого умножителя и сумматора, первые входы первого и третьего умножителей соединены с выходом емкостного датчика, расположенного по оси вторичных колебаний, вторые входы первого и второго умножителей - с выходом емкостного датчика, расположенного по оси первичных колебаний, вторые входы третьего и четвертого умножителей - с выходом фазовращателя, выходы второго и четвертого умножителей подключены ко входам сумматора, выход которого подключен к силовой паре электродов, расположенной по вторичной оси.
Основное преимущество предлагаемого изобретения обусловлено заявленной совокупностью признаков.
Заявленное устройство поясняется чертежами.
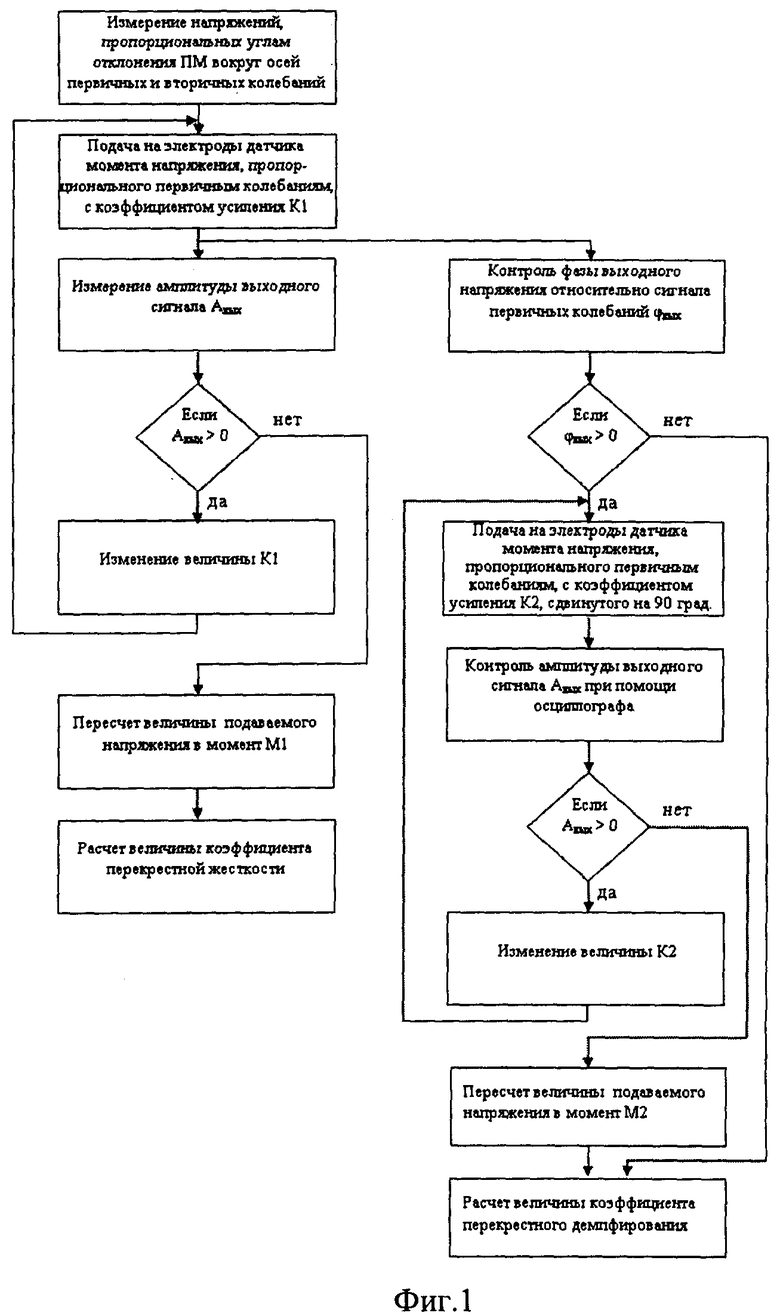
На фиг.1 приведены операции, выполняемые при расчете перекрестных коэффициентов жесткости и демпфирования.
На фиг.2 приведена блок-схема предлагаемого устройства.
На фиг.2 приняты следующие обозначения:
1 - чувствительный элемент микромеханического гироскопа;
2 - подвижный элемент;
3 - измерительные электроды;
4 - силовые электроды;
5, 7- емкостные датчики;
6 - фазовращатель;
8 - устройство формирования переменного сигнала;
9 - демодулятор;
10 - фильтр низких частот;
11, 13, 14, 16 - умножители;
12, 15 -усилители;
17 - сумматор.
Предлагаемый способ заключается в следующем:
Определение коэффициентов перекрестных жесткости и демпфирования осуществляется посредством выполнения операций, представленных в виде блоков на фиг.1:
- при помощи емкостных датчиков, расположенных по осям первичных и вторичных колебаний, измеряются напряжения, пропорциональные углам отклонения ПМ на неподвижном основании вокруг осей первичных и вторичных колебаний;
- напряжение, пропорциональное первичным колебаниям, с некоторым произвольно выбранным коэффициентом усиления К1 (например, К1=1), подается на электроды датчика момента, расположенного по оси вторичных колебаний, тем самым создавая момент, действующий на ПМ;
- при помощи, например, осциллографа, контролируется амплитуда и фаза выходного сигнала ММГ;
- осуществляется сравнение амплитуды выходного сигнала с нулевым значением;
- изменением величины коэффициента К1 необходимо добиться максимально возможного уменьшения амплитуды выходного сигнала при неизменяющейся фазе этого сигнала относительно напряжения первичных колебаний;
- при некотором значении К1, которое изменяется от образца к образцу, появляется фазовый сдвиг между выходным сигналом и напряжением первичных колебаний, контролируемый, например, при помощи осциллографа, этот фазовый сдвиг свидетельствует о наличии сигнала, ортогонального к первичным колебаниям, поэтому на те же электроды датчика момента дополнительно подается напряжение, пропорциональное первичным колебаниям, с некоторым произвольно выбранным коэффициентом усиления К2 (например, К1=1) и сдвинутым по фазе относительно первичных колебаний на 90 град.;
- изменением величины коэффициента К2 добиться уменьшения выходного напряжения до нуля;
- измеряются величины двух напряжений, подаваемых на электроды датчика момента и рассчитываются моменты, действующие на ПМ, обусловленные этими напряжениями по формуле:
 ,
,
где ε - диэлектрическая проницаемость среды, ε0 - диэлектрическая постоянная, S - площадь взаимного перекрытия между электродом датчика момента и ПМ, d - зазор между электродом датчика момента и ПМ, U - напряжение, подаваемое на электроды датчика момента, r - плечо действия силы, создаваемой напряжением U;
- рассчитывается коэффициент перекрестной жесткости подвеса по формуле:

где α - угол отклонения ПМ вокруг оси первичных колебаний, точно измеряемый при помощи емкостного датчика и зарядового усилителя;
- рассчитывается коэффициент перекрестного демпфирования подвеса по формуле:

где  - скорость перемещения ПМ вокруг оси первичных колебаний, определяемая в виде производной от угла α.
- скорость перемещения ПМ вокруг оси первичных колебаний, определяемая в виде производной от угла α.
Описанные операции (сведение к нулевому значению амплитуды выходного сигнала) могут осуществляться последовательно, если они выполняются оператором вручную, или одновременно, в случае работы высококвалифицированного оператора или автоматического устройства, описанного ниже.
Необходимо отметить, что для того, чтобы точно определить коэффициенты сxy, kxy, фазовый сдвиг между подаваемыми напряжениями на электроды датчика момента необязательно должен быть строго 90 град. В этом случае нужно сделать пересчет коэффициентов в необходимую систему координат.
Приведенный на фиг.2 микромеханический гироскоп включает в себя чувствительный элемент (ЧЭ) 1, состоящий из подвижного элемента 2, измерительных электродов по осям первичных и вторичных колебаний 3 и силовых электродов 4. К измерительным электродам 3 подключены емкостные датчики 5 и 7, преобразующие емкость в напряжение. К выходу емкостного датчика 7 по оси вторичных колебаний последовательно подключено устройство формирования переменного сигнала 8, выход которого соединен с силовыми электродами 4 ЧЭ 1. Второй и третий входы устройства 8 соединены с выходом емкостного датчика 5 по оси первичных колебаний и выходом фазовращателя 6. Выход фазовращателя соединен со вторым входом демодулятора 9, выход которого соединен с входом ФНЧ 10.
Устройство работает следующим образом.
При помощи устройства возбуждения первичных колебаний ПМ 2 совершает колебания вокруг оси первичных колебаний с некоторой, заранее заданной, постоянной амплитудой, которые преобразуются в напряжение при помощи емкостного датчика 5. Возникающие при этом колебания ПМ 2 на неподвижном основании по оси вторичных колебаний преобразуются в напряжение при помощи емкостного датчика 7, которое поступает в устройство формирования переменного напряжения 8, где демодулируется, в первом случае, сигналом с выхода емкостного датчика 5, а, во втором, - сигналом, сдвинутым на 90 град. фазовращателем 6. Демодулированные сигналы поступают на усилители 12 и 15, которые могут быть выполнены в виде интеграторов, где выделяются постоянные уровни напряжения, пропорциональные, в первом случае, отклонению ПМ, обусловленному наличием коэффициента перекрестной жесткости, а во втором - коэффициентом перекрестного демпфирования. Выделенные постоянные уровни напряжения перемножаются посредством умножителей 13 и 16 соответственно с сигналом с выхода фазовращателя и емкостного датчика по оси первичных колебаний. Полученные таким образом два переменных напряжения с различными амплитудами и фазами складываются сумматором 17 и подаются на силовые электроды 4, тем самым компенсируются колебания ПМ вокруг оси вторичных колебаний, вносящие ошибку в работу ММГ.
Таким образом, элементы 11-17 формируют устройство, которое обнуляет выходной сигнал ММГ за счет автоматического выбора напряжений на силовых электродах 4, создавая компенсирующий момент, который представляет собой сумму двух моментов, создаваемых переменными напряжениями, формируемыми на выходах элементов 13, 16.
Устройство формирования переменного напряжения 8 может быть выполнено, как при помощи аналоговых, так и цифровых элементов.
Используя предложенный метод были определены коэффициенты перекрестных жесткости и демпфирования, величины которых для семи образцов чувствительного элемента приведены в таблице. Полученные значения коэффициентов сxy, kxy были использованы для компенсации колебаний ПМ вокруг оси вторичных колебаний на неподвижном основании.
Таким образом, рассчитаны два коэффициента (cxy, kxy), соответствующих двум ортогональным составляющим вредного момента в ММГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2447403C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2289100C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2008 |
|
RU2393428C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2347191C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2471149C2 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ЕЕ ОСНОВЕ | 2006 |
|
RU2320962C1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2008 |
|
RU2370733C1 |
Изобретение относится к гироскопам вибрационного типа, в частности к микромеханическим гироскопам (ММГ) с подвижной массой (ПМ). Способ определения коэффициентов перекрестных жесткости и демпфирования подвеса ММГ заключается в измерении сигналов, пропорциональных углам отклонения ПМ вокруг осей первичных и вторичных колебаний, и формировании момента, компенсирующего колебания ПМ вокруг оси вторичных колебаний на неподвижном основании, в формировании момента, компенсирующего колебания ПМ вокруг оси вторичных колебаний на неподвижном основании путем подачи на силовые электроды, расположенные по оси вторичных колебаний, суммы двух переменных напряжений с различными амплитудами. Первое из них синфазно сигналу, пропорциональному углу отклонения ПМ вокруг оси первичных колебаний, а второе ортогонально первому. Коэффициенты перекрестных жесткости и демпфирования подвеса определяются соответственно отношением величины момента к измеренной амплитуде первичных колебаний и к рассчитанной величине скорости этих колебаний. ММГ содержит ПМ, гребенчатый двигатель, емкостной датчик перемещения ПМ по оси первичных колебаний, выход которого соединен с входом фазовращателя, устройство возбуждения первичных колебаний, включенное между емкостными датчиками по оси первичных колебаний и электродами гребенчатого двигателя, две пары электродов по оси вторичных колебаний, одна из которых является силовой, другая - измерительной, к выходу которого подключены последовательно соединенные умножитель и фильтр низкой частоты, второй вход умножителя соединен с выходом фазовращателя. Между парами электродов по оси вторичных колебаний введено устройство формирования переменного напряжения в виде суммы напряжений с различными амплитудами и сдвинутыми друг относительно друга на 90 градусов. Техническим результатом является повышение чувствительности ММГ. 2 н. и 1 з.п. ф-лы, 2 ил., 1 табл.
| US 6571630 B1, 03.06.2003 | |||
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2006 |
|
RU2301970C1 |
| ПЕШЕХОНОВ В.Г | |||
| и др | |||
| Результаты разработки микромеханического гироскопа | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| US 6067858 А, 30.05.2000 | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2005 |
|
RU2282152C1 |

