Изобретение касается усовершенствования преобразователей с вибрирующими элементами и может быть использовано в измерительной технике при измерении силы, давления, ускорения и т.п.
При изменении температуры окружающей среды изменяется температура датчика, что сказывается на изменении выходного сигнала, следовательно, появляется дополнительная погрешность измерения. Наибольшее влияние на изменение собственной частоты колебаний резонатора оказывает изменение геометрических размеров первичного преобразователя вследствие наличия у любого материала коэффициента линейного расширения. Механические свойства материала, такие как модуль упругости, изменяются с температурой, но изменение модуля упругости в большинстве случаев оказывает намного меньшее влияние на изменение собственной частоты колебаний, чем геометрическое изменение конструкции. Как правило, при уменьшении температуры окружающей среды жесткость резонатора увеличивается и, как следствие, увеличивается его собственная частота колебаний. При увеличении температуры происходит уменьшение собственной частоты колебаний резонатора.
Проведенное моделирование с использованием метода конечных элементов изменения начального уровня собственной частоты колебаний резонатора (без воздействия измеряемого параметра) в зависимости от воздействия температуры для конструкции резонатора, представленного в патенте США №4813271 от 21.03.1989 г., показало следующие результаты:
- при температуре минус 60°С собственная частота колебаний составила 53019 Гц;
- при температуре +60°С собственная частота колебаний составила 52095 Гц;
- девиация собственной частоты колебаний Δƒ в диапазоне температур ΔT 120°С составила 924 Гц.
Если принять девиацию собственной частоты колебаний резонатора от измеряемого параметра (например, давления величиной 3 атм) ƒН=2500 Гц, то приведенная дополнительная аддитивная температурная погрешность составит  , или переходя к аддитивной температурной чувствительности
, или переходя к аддитивной температурной чувствительности  . Полученные количественные оценки дополнительной аддитивной температурной погрешности и чувствительности не позволяют использовать подобные конструкции без применения специальных методов компенсации температурной погрешности, в особенности в высокоточных датчиках.
. Полученные количественные оценки дополнительной аддитивной температурной погрешности и чувствительности не позволяют использовать подобные конструкции без применения специальных методов компенсации температурной погрешности, в особенности в высокоточных датчиках.
В настоящее время наибольшее распространение получил способ компенсации температурной погрешности, заключающийся во введении в конструкцию датчика термозависимого элемента (например, терморезистора), с которого снимается информация о температуре, с последующей ее обработкой и корректировкой информационного сигнала (например, патент США №4724707 от 20.08.1986 г.). Однако использование данного способа компенсации имеет ряд недостатков:
1. Вводится дополнительный канал измерения температуры.
2. Требуется математическая обработка сигнала с дополнительного канала и скорректировать информационный сигнал с учетом дополнительного сигнала.
3. Не обеспечивается заданная точность измерения температуры для компенсации температурной погрешности.
Наибольшим недостатком данного метода является обеспечение заданной точности компенсации температурной погрешности. Так, для высокоточных датчиков класса не более δ≤0.05% аддитивная температурная чувствительность должна быть Sot≤0.5·10-5 1/°C, что более чем на два порядка меньше полученной количественной оценки датчиков с монокристаллическим резонатором. Тогда для обеспечения заданной точности канал для измерения температуры должен иметь погрешность не более 0.06°С (для рассмотренного ранее случая изменения температуры в диапазоне 120°С), что при существующих методах измерения температуры является проблематичным.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа компенсации аддитивной температурной погрешности датчика с вибрирующим элементом и выходным сигналом в виде девиации амплитуды напряжения, который позволил бы уменьшить аддитивную температурную погрешность в условиях стационарных температурных режимов с заданной точностью.
Технический результат заключается в уменьшении аддитивной температурной погрешности датчика с вибрирующим элементом при воздействии стационарных температурных режимов.
1. Указанный технический результат достигается тем, что в частотозависимую обратную связь генератора синусоидальных колебаний вводится термочувствительный элемент, который изменяет частоту генератора таким образом, что при отсутствии измеряемого параметра (например, давления) вибрирующий элемент колеблется в резонансе при любом изменении температуры преобразователя, а выходной сигнал является зависимостью амплитуды колебаний от измеряемого параметра. Таким образом, частота генератора поддерживается постоянной и зависит только от температуры частотного преобразователя (вибрирующего элемента), а частота собственных колебаний вибрирующего элемента зависит от измеряемого параметра (например, давления) и его собственной температуры.
На фиг.1 приведена структурная схема преобразователя: 1 - генератор синусоидальных колебаний, 2 - резонатор, 3 - нормирующий усилитель, 4 - термозависимый элемент, Т - внешний воздействующий фактор - температура, Р - измеряемый параметр, например давление. Выход преобразователя представляет собой изменение амплитуды колебаний вибрирующего элемента 2 от измеряемого параметра Р.
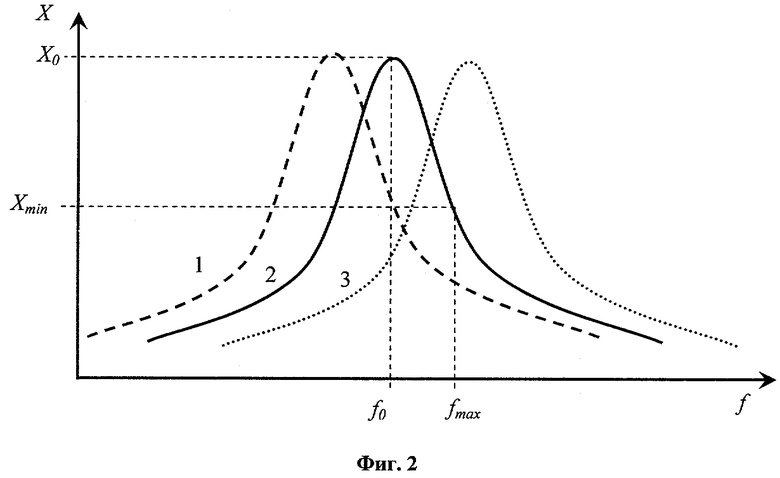
На фиг.2 приведена зависимость амплитуды колебаний вибрирующего элемента от частоты собственных колебаний вибрирующего элемента при номинальной температуре (кривая 2), при повышенной температуре (кривая 1), что соответствует уменьшению частоты собственных колебаний вследствие уменьшения жесткости вибрирующего элемента, и при пониженной температуре (кривая 3), что соответствует увеличению частоты собственных колебаний вследствие увеличения жесткости вибрирующего элемента. Вид резонансных кривых зависит от характеристик используемого материала, в частности коэффициента внутреннего трения (демпфирования).
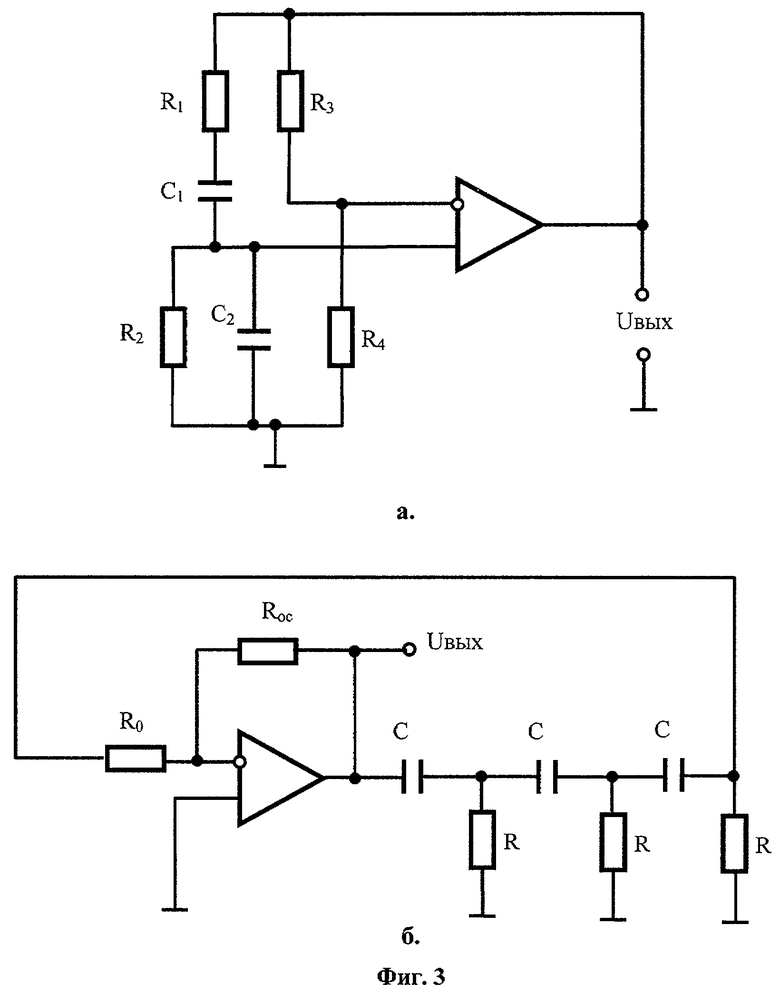
На фиг.3 приведены примеры генераторов гармонических колебаний: фиг.3а - генератор синусоидальных колебаний с мостом Вина, фиг.3б - генератор с трехзвенным RC-четырехполюсником в обратной связи.
При номинальной температуре термочувствительный элемент в цепи генератора синусоидальных колебаний подбирается таким образом, чтобы обеспечить максимальную амплитуду колебаний вибрирующего элемента при отсутствии измеряемой величины. Таким образом, после настройки генератора синусоидальных колебаний амплитуда колебаний вибрирующего элемента равна Х0 при частоте собственных колебаний вибрирующего элемента ƒ0 (которая равна частоте генератора синусоидальных колебаний при отсутствии измеряемой величины), т.е. вибрирующий элемент совершает колебания в резонансе, см. фиг.2. Работа преобразователя заключается в следующем: при номинальной температуре частота генератора (которая зависит только от температуры) соответствует частоте собственных колебаний вибрирующего элемента ƒ0, а амплитуда колебаний вибрирующего элемента составляет при этом Х0; при увеличении значения измеряемого параметра (например, давления) частота собственных колебаний вибрирующего элемента увеличивается, а амплитуда колебаний уменьшается вследствие того, что колебания вибрирующего элемента теперь происходят не в резонансе и при максимальном значении измеряемого параметра частота собственных колебаний вибрирующего элемента становится равной ƒmax, а амплитуда колебаний уменьшается до Хmin. При такой работе преобразователя выходной сигнал есть зависимость амплитуды колебаний вибрирующего элемента от измеряемого параметра (например, давления).
При изменении температуры в сторону увеличения или уменьшения относительно номинальной температуры частота собственных колебаний вибрирующего элемента изменяется в сторону уменьшения или увеличения соответственно относительно частоты собственных колебаний при номинальной температуре. Величина изменения значения термочувствительного элемента от температуры будет функционально связана с величиной изменения частоты собственных колебаний вибрирующего элемента от температуры. Тогда при соответствующем подборе номинала и температурного коэффициента изменения номинала термозависимого элемента при изменении температуры и отсутствии измеряемого параметра частота генератора синусоидальных колебаний будет всегда совпадать с частотой собственных колебаний вибрирующего элемента, обеспечивая колебания последнего в резонансе. При увеличении температуры работа преобразователя соответствует кривой 1, фиг.2, а при уменьшении - кривой 3, фиг.2.
Точность компенсации аддитивной температурной погрешности в случае, когда частота напряжения генератора совпадает с частотой собственных колебаний вибрирующего элемента, определяется изменением амплитуды колебаний вибрирующего элемента в режиме резонанса при изменении температуры, т.к. с ростом собственной частоты амплитуда колебаний в резонансе изменяется.
Проведенное моделирование показало, что:
- при номинальной температуре +20°С амплитуда колебаний равна 2.0 мкм;
- при температуре минус 60°С амплитуда колебаний составила 1.9992 мкм;
- при температуре +60°С амплитуда колебаний составила 2.0002 мкм;
- девиация амплитуды составила 0.001 мкм.
Аддитивная температурная погрешность составила  на 120°С изменения температуры и переходя к аддитивной температурной чувствительности
на 120°С изменения температуры и переходя к аддитивной температурной чувствительности  . Полученные результаты обеспечивают требуемую точность по сравнению с прототипом.
. Полученные результаты обеспечивают требуемую точность по сравнению с прототипом.
Пример генератора синусоидальных колебаний приведен на фиг.3а - генератор синусоидальных колебаний с мостом Вина. При  в устройстве возникают автоколебания, частота которых определяется формулой (см., например, Гутников B.C. Интегральная электроника в измерительных устройствах. - 2-е изд. перераб. и доп. - Л.: Энергоатомиздат, 1988. - 304 с.):
в устройстве возникают автоколебания, частота которых определяется формулой (см., например, Гутников B.C. Интегральная электроника в измерительных устройствах. - 2-е изд. перераб. и доп. - Л.: Энергоатомиздат, 1988. - 304 с.):

Кроме того, автоколебания возникают при условии, что коэффициент усиления усилителя, составленного из операционного усилителя и резисторов R3 и R4, больше трех.
При использовании в качестве термозависимого элемента термосопротивления или термозависимой емкости его сопротивление или емкость при положительном температурном коэффициенте сопротивления (ТКС) или температурном коэффициенте емкости (ТКЕ) будут увеличиваться с ростом температуры, т.е. будут иметь обратно пропорциональную зависимость с изменением частоты собственных колебаний вибрирующего элемента от температуры. Тогда при включении термозависимого элемента в частотозависимую обратную связь генератора синусоидальных колебаний при изменении температуры в соответствии с (1) генерируемая частота сигнала будет с ростом температуры изменяться обратно пропорционально номиналу термозависимого элемента и прямо пропорционально изменению частоты колебаний вибрирующего элемента.
При изменении температуры частота генератора становится равной:
- при использовании в качестве термозависимого элемента сопротивления R1:

где  - величина сопротивления R1 при изменении температуры на величину ΔT;
- величина сопротивления R1 при изменении температуры на величину ΔT;
αR1 - температурный коэффициент сопротивления R1;
- при использовании в качестве термозависимого элемента емкости С1:

где  - величина емкости С1 при изменении температуры на величину ΔT;
- величина емкости С1 при изменении температуры на величину ΔT;
αС1 - температурный коэффициент емкости С1.
Для рассматриваемого ранее преобразователя, патент США №4813271 от 21.03.1989 г., частота генератора при температуре минус 60°С равна 53019 Гц, а при температуре +60°С частота генератора равна 52095 Гц.
При R1=R2=10 МОм и С1=10 нФ требуемое значение С2 при температуре минус 60°С составляет 9.011 пФ, а при изменении температуры до плюс 60°С С2=9.334 пФ. Принимая температурный коэффициент емкости равным 1·10-3 1/°С, что может быть получено на практике, требуемое изменение емкости составляет 9.334 пФ - 9.011 пФ =0.323 пФ на всем температурном диапазоне 120°С, следовательно, начальное значение емкости равно  для температуры преобразователя минус 60°С. Для обеспечения указанных выше значений емкости С2 требуется к рассчитанной термозависимой емкости параллельно подключить термонезависимую емкость величиной 6.324 пФ. При выполнении данных действий обеспечивается равенство суммарной емкости С2=9.011 пФ при температуре минус 60°С и С2=9.334 пФ при температуре плюс 60°С.
для температуры преобразователя минус 60°С. Для обеспечения указанных выше значений емкости С2 требуется к рассчитанной термозависимой емкости параллельно подключить термонезависимую емкость величиной 6.324 пФ. При выполнении данных действий обеспечивается равенство суммарной емкости С2=9.011 пФ при температуре минус 60°С и С2=9.334 пФ при температуре плюс 60°С.
При R1=500 кОм и С1=С2=100 пФ требуемое значение R2 составляет 1.802 кОм при температуре минус 60°С, а при изменении температуры до плюс 60°С R2=1.867 кОм. Для нихрома Х20Н80, используемого при формировании напыляемых сопротивлений, температурный коэффициент сопротивления не превышает 1·10-3 1/°С, для сплава Х20Н75Ю температурный коэффициент сопротивления не превышает 5·10-4 1/°С, а для сплава на основе силицидов П65ХС температурный коэффициент сопротивления не превышает 1·10-4 1/°С. Аналогично проведенному ранее расчету термозависимой емкости определяется требуемое значение термозависимого сопротивления на основе, например, сплава Х20Н80. Изменение сопротивления составляет 1.867 кОм - 1.802 кОм = 65 Ом на всем температурном диапазоне 120°С, таким образом, начальное значение сопротивления равно  для температуры преобразователя минус 60°С. Для обеспечения требуемого значения термозависимого сопротивления R2 к рассчитанному термозависимому сопротивлению последовательно подключается термонезависимое сопротивление величиной 1.265 кОм. Таким образом, обеспечивается суммарное значение термозависимого сопротивления R2=1.802 кОм при температуре минус 60°С и R2=1.867 кОм при температуре плюс 60°С. Аналогично проводится расчет для любого другого применяемого сплава.
для температуры преобразователя минус 60°С. Для обеспечения требуемого значения термозависимого сопротивления R2 к рассчитанному термозависимому сопротивлению последовательно подключается термонезависимое сопротивление величиной 1.265 кОм. Таким образом, обеспечивается суммарное значение термозависимого сопротивления R2=1.802 кОм при температуре минус 60°С и R2=1.867 кОм при температуре плюс 60°С. Аналогично проводится расчет для любого другого применяемого сплава.
Другой пример реализации генератора синусоидальных колебаний приведен на фиг.3б - генератор. Частота синусоидальных колебаний в этом случае определяется по следующей формуле:

Отличительной особенностью этого генератора является прямая зависимость частоты собственных колебаний от величины сопротивления R и емкости С (в генераторе с мостом Вина эта зависимость - квадратичная), но схемная реализация сложнее с точки зрения равенства номиналов трех резисторов R и трех емкостей С.
2. В предлагаемом способе компенсации аддитивной погрешности термочувствительным элементом в генераторе синусоидальных колебаний с мостом Вина может выступать как сопротивление R1 (или R2), так и емкость С1 (или С2). Но в случае изменения только одного сопротивления или одной емкости возможно искажение синусоидального сигнала, выдаваемого генератором синусоидальных колебаний, и появление высших гармоник, что может уменьшить точность компенсации. Таким образом, с целью уменьшения искажений синусоидального сигнала рекомендуется введение двух термочувствительных элементов (сопротивления R1 и R2 или емкостей С1 и С2 с одинаковым значением номинала и температурного значения сопротивления/емкости). Кроме того, с целью уменьшения динамической температурной погрешности указанные термочувствительные элементы должны располагаться вблизи вибрирующего элемента (на преобразователе).
В этом случае частота генератора с мостом Вина определяется по следующей формуле (R=R1=R2 и С=С1=С2):

Тогда при С=100 пФ требуемое значение R составляет 30.018 кОм при температуре минус 60°С, а при изменении температуры до плюс 60°С R=30.551 кОм. Аналогично приведенным выше расчетам определяется требуемая величина изменения сопротивления в зависимости от изменения температуры в пределах 120°С: 30.551 кОм - 30.018 кОм = 533 Ом. Тогда для сплава Х20Н80 получают требуемое начальное значение термозависимого сопротивления  при температуре минус 60°С. Величина термонезависимого сопротивления равна 30.018 кОм - 4.442 кОм = 25.576 кОм, а для получения требуемого суммарного значения сопротивления R=30.018 кОм при температуре минус 60°С указанные сопротивления (термозависимое и термонезависимое) включаются последовательно, при этом суммарное значение сопротивления R будет составлять 30.551 кОм при повышении температуры до плюс 60°С.
при температуре минус 60°С. Величина термонезависимого сопротивления равна 30.018 кОм - 4.442 кОм = 25.576 кОм, а для получения требуемого суммарного значения сопротивления R=30.018 кОм при температуре минус 60°С указанные сопротивления (термозависимое и термонезависимое) включаются последовательно, при этом суммарное значение сопротивления R будет составлять 30.551 кОм при повышении температуры до плюс 60°С.
При использовании в качестве термозависимого элемента емкости получаем следующие значения изменения емкости от температуры при величине сопротивления R=100 кОм: С=30.018 пФ при температуре минус 60°С, а при изменении температуры до плюс 60°С величина емкости увеличивается до 30.551 пФ. Требуемое изменение емкости составляет 30.551 пФ - 30.018 пФ = 0.533 пф при изменении температуры на 120°С. Исходя из температурного коэффициента емкости, который можно получить на практике равным 1·10-3 1/°С, начальное значение термозависимой емкости равно  для температуры минус 60°С. Для получения требуемого значения емкости С=30.018 пФ при температуре минус 60°С к термозависимой емкости величиной 4.442 пФ необходимо параллельно подключить термонезависимую емкость величиной 25.576 пФ. При выполнении этого условия величина суммарной емкости С будет равна 30.018 пФ при температуре минус 60°С и 30.551 пФ при температуре плюс 60°С.
для температуры минус 60°С. Для получения требуемого значения емкости С=30.018 пФ при температуре минус 60°С к термозависимой емкости величиной 4.442 пФ необходимо параллельно подключить термонезависимую емкость величиной 25.576 пФ. При выполнении этого условия величина суммарной емкости С будет равна 30.018 пФ при температуре минус 60°С и 30.551 пФ при температуре плюс 60°С.
Изобретение относится к измерительной технике и может быть использовано при измерении силы, давления, ускорения и т.п. Технический результат - повышение точности измерения. Для достижения данного результата осуществляют компенсацию аддитивной температурной погрешности датчика с вибрирующим элементом на основе изменения частоты генератора синусоидальных колебаний путем включения в цепь возбуждения генератора термозависимого элемента. При этом генератор синусоидальных колебаний предназначен для возбуждения колебаний вибрирующего элемента. Выходной сигнал датчика представляет собой зависимость амплитуды от измеряемого параметра. Устанавливают функциональную связь изменения величины термозависимого элемента от температуры с изменением собственной частоты колебаний вибрирующего элемента и генератора синусоидальных колебаний. 1 з.п. ф-лы, 3 ил.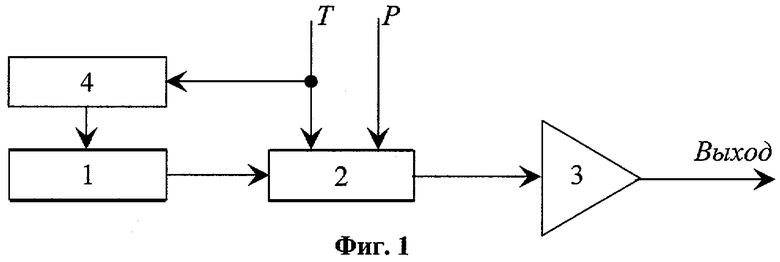
| US 4724707 А, 16.02.1988 | |||
| US 4813271 А, 21.03.1989 | |||
| СГИБОВ А.П.Температурная компенсация ухода нуля мостового преобразователя | |||
| Приборы и системы управления | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Способ балансировки и температурной компенсации мостовых схем тонкопленочных тензорезисторных датчиков | 1983 |
|
SU1174738A1 |
| Способ настройки тензометрических мостов | 1990 |
|
SU1758563A1 |

