Изобретение относится к измерительной технике и может быть использовано для определения основных параметров движения рельсового экипажа (далее - РЭ), таких как его текущее положение и линейная скорость, с последующей передачей этих параметров в систему управления РЭ. В технической литературе подобные устройства обычно называются датчиками пути и скорости. Под рельсовыми экипажами здесь и далее подразумеваются электровозы, тепловозы, электропоезда, дизель-поезда, поезда метро и т.п. Устройство автономно, так как не нуждается ни в установке каких-либо дополнительных реперных элементов вдоль рельсовой колеи, ни в приеме сигналов спутниковых навигационных систем.
Целесообразность определения текущего положения РЭ на рельсовой колее обусловлена тем, что эта информация необходима для регистрации параметров движения РЭ (так называемый "черный ящик"), для систем автоведения поездов (САВП), для системы управления гребнесмазыванием, для системы управления наклоном пола кузова (система "Pendolino"), в системах технического диагностирования состояния РЭ и железнодорожного пути, искусственных сооружений, контактной сети, энергоснабжения и устройств железнодорожной автоматики.
Целесообразность прямого измерения линейной скорости поступательного движения РЭ обусловлена тем, что эта информация необходима для регистрации параметров движения РЭ (так называемый "черный ящик"), для систем автоведения поездов (САВП), для системы управления гребнесмазыванием, для системы управления наклоном пола кузова (система "Pendolino"), а также для системы управления тягой и торможением (подсистема контроля проскальзывания в контакте "колесо - рельс").
Известно устройство для измерения линейной скорости локомотива [Магнитометрический измеритель скорости и ускорения локомотива //Вiсник Схiдно-украiнского державного университету, 2000, №7(29), с.158-162)], содержащее два идентичных регистратора, установленные под днищем локомотива со смещением S друг относительно друга вдоль направления его движения. Регистраторами непрерывно измеряют информативный параметр, характеризующий одно из периодически изменяющихся вдоль пути свойств элементов конструкции железнодорожного полотна, в качестве которого выбрана степень локальной намагниченности.
Недостатками устройства является низкая функциональная надежность из-за наличия сильных внешних электромагнитных полей, наводимых в железнодорожных рельсах во время движения локомотива. Действие этих полей может обуславливать повышение локальной намагниченности поверхности головки рельса до уровня, достаточного для образования ложной магнитной метки. И, наоборот, действие внешних электромагнитных полей может привести к снижению уровня намагниченности поверхности рельса в районе нахождения истинной магнитной метки и, как следствие, к ее исчезновению. Оба этих фактора обуславливают неадекватное измерение временного интервала, затрачиваемое локомотивом на прохождение базового расстояния S, а следовательно, неадекватное измерение линейной скорости локомотива.
Кроме того, регистраторы должны быть плотно прижаты к рельсу, чтобы создать необходимую степень локальной намагниченности.
Наиболее близким (прототипом) к заявляемому устройству, как по первому, так и по второму варианту, является устройство для измерения линейной скорости локомотива, описанное в качестве примера реализации одноименного способа [Патент RU №2189599]. Устройство содержит два идентичных регистратора, которые образованы источниками волнового излучения (например, ультразвукового), которые по своей сути являются передающими антеннами; датчиками интенсивности излучения, которые по своей сути являются приемными антеннами и расположены в непосредственной близости от соответствующих источников. Датчики воспринимают отраженное от полотна излучение. Устройство также содержит суммирующее устройство СУ, пороговое устройство ПУ, таймер Т и делительное устройство ДУ, которые выполнены на основе микропроцессора.
Недостатком прототипа является невозможность использования устройства в зимнее время при наличии снежного покрова, т.к. ультразвуковое излучение отражается от поверхности снега и не позволяет обнаружить границу раздела двух сред, обладающих различными отражающими способностями (щебеночный балласт и шпалы).
Задачей предлагаемого изобретения является создание автономного бортового устройства, предназначенного для определения текущего положения и линейной скорости РЭ, которое для своей работы не нуждается ни в установке каких-либо дополнительных реперных элементов вдоль рельсовой колеи, ни в приеме сигналов спутниковых навигационных систем.
Техническим результатом для устройства по первому варианту является определение текущего положения РЭ путем подсчета числа шпал, начиная от условленного исходного пункта, а также линейной скорости РЭ путем деления расстояния между серединами двух последовательно расположенных шпал на промежуток времени между моментами фиксации регистратором середин этих шпал.
Техническим результатом для устройства по второму варианту является определение текущего положения РЭ путем подсчета числа шпал, начиная от условленного исходного пункта, а также повышение точности определения линейной скорости РЭ путем деления фиксированного расстояния (база регистрации) на промежуток времени между моментами фиксации середины очередной шпалы первым и вторым регистраторами.
Решение задачи по первому варианту достигается автономным бортовым устройством для определения положения и скорости РЭ, содержащим регистратор и программируемое микропроцессорное устройство. Регистратор состоит из блока управления, соединенного с передающей антенной, являющейся источником СВЧ-излучения, приемной антенны, являющейся приемником отраженного СВЧ-излучения, соединенной со стробирующим усилителем, усиливающим принятое излучение и преобразующим его в цифровой вид. Регистратор закрыт сверху и с боков экранирующим колпаком и соединен с программируемым микропроцессорным устройством, которое связано с системой управления РЭ.
Решение задачи по второму варианту достигается автономным бортовым устройством для определения положения и скорости РЭ, содержащим два идентичных регистратора и программируемое микропроцессорное устройство. Первый регистратор состоит из блока управления, соединенного с передающей антенной, являющейся источником СВЧ-излучения, приемной антенны, являющейся приемником отраженного СВЧ-излучения, соединенной со стробирующим усилителем, усиливающим принятое излучение и преобразующим его в цифровой вид. Первый регистратор закрыт сверху и с боков экранирующим колпаком. Второй регистратор состоит из блока управления, соединенного с передающей антенной, являющейся источником СВЧ-излучения, приемной антенны, являющейся приемником отраженного СВЧ-излучения, соединенной со стробирующим усилителем, усиливающим принятое излучение и преобразующим его в цифровой вид. Второй регистратор закрыт сверху и с боков экранирующим колпаком.
Регистраторы крепятся к несущей планке на расстоянии 0,25-0,5 м (база регистрации L) один за другим в направлении движения. Регистраторы соединены с программируемым микропроцессорным устройством, которое связано с системой управления РЭ.
На фиг.1 приведена структурная схема устройства для определения положения и скорости РЭ по первому варианту, где регистратор 1 состоит из блока управления 2, соединенного с передающей антенной 3, приемной антенны 4, соединенной со стробирующим усилителем 5. Регистратор 1 закрыт сверху и с боков экранирующим колпаком 6 и соединен с программируемым микропроцессорным устройством 7, которое связано с системой управления РЭ.
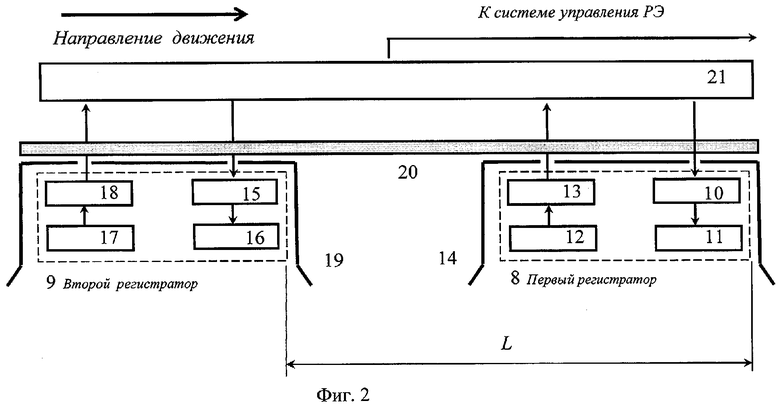
На фиг.2 приведена структурная схема устройства для определения положения и скорости РЭ по второму варианту, имеющему в своем составе два идентичных регистратора 8 и 9. Первый регистратор 8 состоит из блока управления 10, соединенного с передающей антенной 11, приемной антенны 12, соединенной со стробирующим усилителем 13. Первый регистратор 8 закрыт сверху и с боков экранирующим колпаком 14. Второй регистратор 9 состоит из блока управления 15, соединенного с передающей антенной 16, приемной антенны 17, соединенной со стробирующим усилителем 18. Второй регистратор 9 закрыт сверху и с боков экранирующим колпаком 19.
Регистраторы 8 и 9 крепятся к несущей планке 20 на расстоянии 0,25÷0,5 м (база регистрации L) один за другим в направлении движения. Регистраторы 8 и 9 соединены с программируемым микропроцессорным устройством 21, которое связано с системой управления РЭ.
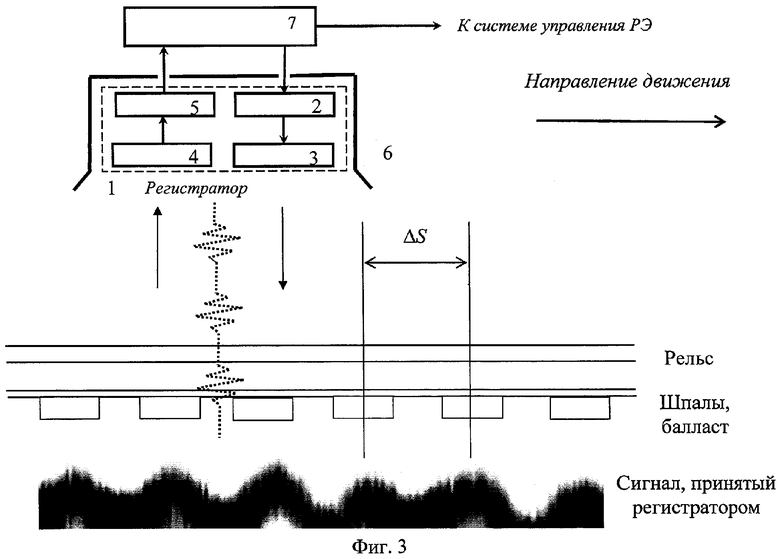
Работа устройства по первому варианту иллюстрируется фиг.3. Входящий в состав регистратора 1 блок управления 2 вырабатывает короткие импульсы, возбуждающие в передающей антенне 3 электромагнитное излучение СВЧ-диапазона. Излучение частично отражается от шпал и балласта, воспринимается приемной антенной 4, а затем усиливается и преобразуется в цифровой вид стробирующим усилителем 5. Далее информация о принятом излучении обрабатывается и сохраняется в программируемом микропроцессорном устройстве 7 и передается на вход системы управления РЭ.
Устройство крепится к элементам конструкции РЭ на высоте 0,1...1,0 м над уровнем головок рельсов. При перемещении устройства над железнодорожным полотном интенсивность отраженного излучения (сигнал, принятый регистратором) имеет периодический характер, обусловленный периодичностью расположения шпал в рельсошпальной решетке. Характер изменения принятого сигнала при перемещении устройства (а именно наличие максимума принятого сигнала при нахождении регистратора 1 над серединой очередной шпалы) позволяет определить количество пройденных шпал и тем самым положение РЭ на рельсовой колее.
Программируемое микропроцессорное устройство 7 фиксирует моменты времени, когда сигнал, принятый регистратором 1, достигает максимума, а также промежутки времени между фиксацией последовательных максимумов. Линейная скорость РЭ находится путем деления расстояния между серединами двух последовательно расположенных шпал ΔS (которое определяется техническими нормами содержания пути) на промежуток времени Δt между моментами фиксации максимумов принятого сигнала от этих шпал:

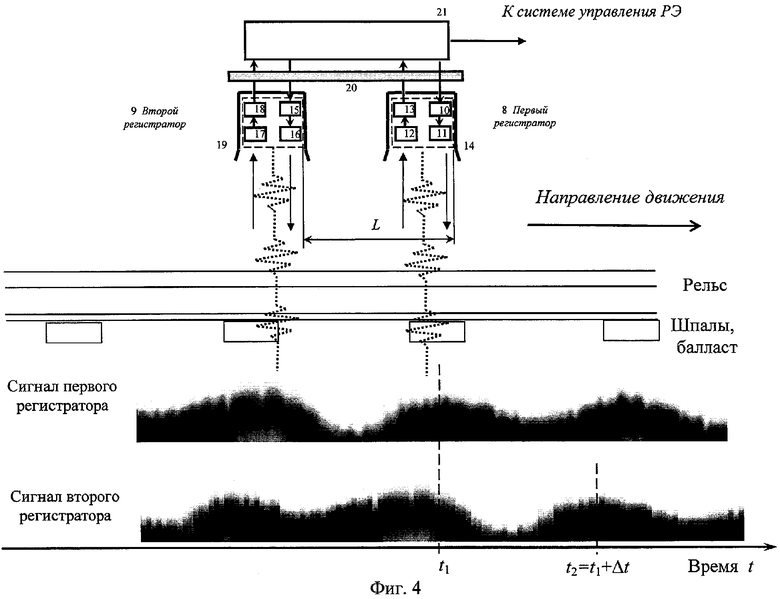
Работа устройства по второму варианту иллюстрируется фиг.4. Устройство крепится к элементам конструкции РЭ на высоте 0,1...1,0 м над уровнем головок рельсов. Регистраторы 8 и 9 прикреплены к несущей планке 20 на расстоянии L, называемом базой регистрации, один за другим в направлении движения. База регистрации L (находящаяся в пределах 0,25÷0,5 м) принята заведомо меньшей, чем расстояние между серединами двух последовательно расположенных шпал, которое определяется нормами содержания пути.
Входящие в состав регистраторов 8 и 9 блоки управления 10 и 15 вырабатывают короткие импульсы, возбуждающие в передающих антеннах 11 и 16 электромагнитное излучение СВЧ-диапазона. Излучение частично отражается от шпал и балласта, воспринимается приемными антеннами 12 и 17, а затем усиливается и преобразуется в цифровой вид стробирующими усилителями 13 и 18. Далее информация о сигналах, принятых первым и вторым регистраторами 8 и 9, обрабатывается и сохраняется в программируемом микропроцессорном устройстве 21 и поступает на вход системы управления РЭ.
При перемещении устройства над железнодорожным полотном регистраторы 8 и 9 воспринимают сигналы, имеющие периодический характер, обусловленный расположением шпал в рельсошпальной решетке вдоль направления движения. Характер изменения информации при перемещении устройства (наличие максимума принятого сигнала при нахождении первого регистратора 8 над серединой очередной шпалы) позволяет определить количество пройденных шпал и тем самым определить положение РЭ на рельсовой колее.
Программируемое микропроцессорное устройство 21 фиксирует моменты времени, когда сигналы, принятые первым и вторым регистраторами 8 и 9, достигают своих максимумов. Момент t1 фиксации максимума сигнала, принятого первым регистратором 8 при прохождении очередной шпалы, отличается от момента t2 фиксации максимума сигнала, принятого вторым регистратором 9 при прохождении той же шпалы, на промежуток времени Δt, а именно t2=t1+Δt. Скорость движения РЭ определяется как

Повышение точности определения линейной скорости устройством по второму варианту по сравнению с устройством по первому варианту обеспечивается за счет того, что база регистрации L постоянна, а расстояние ΔS между серединами последовательно расположенных шпал на практике выдерживается с некоторой погрешностью.
Таким образом, предложенные варианты автономного бортового устройства для определения положения и скорости рельсового экипажа позволяют решить актуальную техническую задачу нахождения мгновенных значений основных параметров движения, что важно для функционирования систем управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОКОМОТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ПРОЙДЕННОГО ПУТИ | 2008 |
|
RU2378654C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808856C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ЛОКОМОТИВА И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2021 |
|
RU2769956C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
Изобретение относится к измерительной технике и может быть использовано для определения основных параметров движения рельсового экипажа. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит один регистратор и программируемый микропроцессор. Регистратор состоит из блока управления, соединенного с передающей антенной, являющейся источником СВЧ-излучения, приемной антенны, являющейся приемником отраженного СВЧ-излучения, соединенной со стробирующим усилителем. Причем у регистратора экран соединен с программируемым микропроцессорным устройством, которое связано с системой управления. 2 н.п. ф-лы, 4 ил.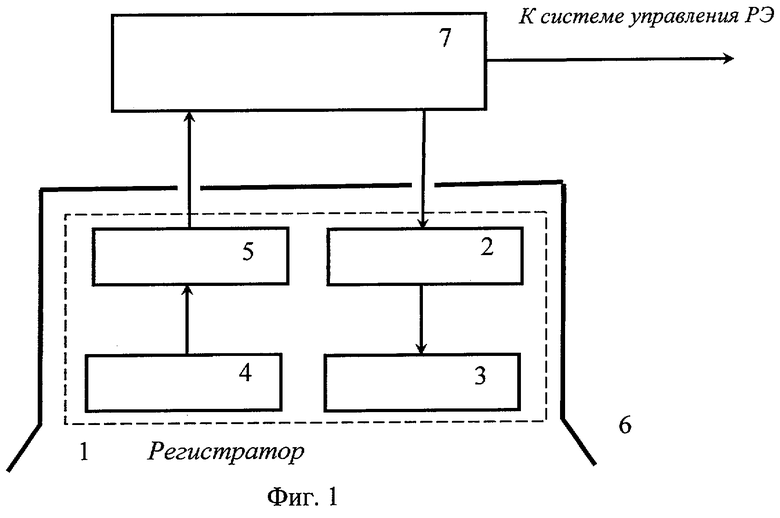
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189599C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189600C1 |
| УСТРОЙСТВО ДЛЯ ПРЕВРАЩЕНИЯ СОЛНЕЧНОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ | 2009 |
|
RU2402719C1 |
| СПОСОБ АВТОГЕННОЙ ПЛАВКИ РУД И КОНЦЕНТРАТОВ ЦВЕТНЫХ МЕТАЛЛОВ | 1995 |
|
RU2093593C1 |
| МНОГОПОРШНЕВОЙ РЫЧАЖНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751012C1 |

