Изобретение относится к измерительной технике, а именно к радиолокации, и может быть использовано на железных дорогах (ж/д) для определения параметров движения локомотива таких, как мгновенная скорость, пройденный путь, направление движения.
Общей проблемой на ж/д транспорте является измерение малых скоростей движения с начала трогания с места и в самом конце движения, вплоть до остановки. Это объясняется тем, что для измерения скорости применяются механические датчики, которые обладают значительной погрешностью измерения, кроме того, при пробуксовке и юзе они не работоспособны.
Известны автодинные радиолокаторы малого радиуса действия с частотной модуляцией, которые нашли широкое применение на ж/д транспорте в качестве измерителей параметров движения вагонов на сортировочных горках, локомотивов относительно полотна дороги, обнаружителей занятости стрелочных переводов и ж/д переездов, датчиков предупреждения столкновений и многое другое, см. Носков В.Я. и др. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазона и их применение» ч. 9 «Радиолокационное применение автодинов. Успехи современной радиоэлектроники», 2016, №3, стр. 32-80.
Недостаток: большая сложность.
Также известен патент РФ №2378654 от 10.01.2010 г. «Локомотивная система определения скорости движения и пройденного пути», которая содержит три приемоизлучающих устройства, каждое из которых включает блок СВЧ -излучателя с передающей антенной и приемный блок отраженного СВЧ -излучения с приемной антенной и усилителем и программируемый микропроцессор с двумя блоками корреляционно-экстремальной обработки. Все приемоизлучающие устройства расположены последовательно по продольной симметрии рельса и отраженные сигналы от подстилающего балласта, воспринимаются и анализируются по специальному обеспечению.
Недостаток: очень сложное схемное решение за счет применения корреляционной обработки, а также нестабильная работа в экстремальных условиях эксплуатации.
Эта система вообще не применима в высокоскоростных ж/д магистралях, в которых не используются шпалы, а есть только прочное подстилающее основание на всем пути, т.е. нет балласта в обычном смысле этого слова, т.е. нет реперов для отчетов.
В настоящее время намечается тенденция перехода электрического ж/д транспорта на постоянном токе на переменный ток промышленной частоты, это дает значительное повышение эксплуатационных характеристик одновременно с применением управления всеми двигательными (ведущими) колесами локомотива по схеме мотор/колесо от центрального процессора. Это предъявляет повышение требований к измерениям параметров движения как на сверхмалых (0.5-2 м/с), так и на больших скоростях (300-500 км/ч).
Технической задачей изобретения является повышение точности измерения скорости движения локомотива на ж/д пути, особенно на малых скоростях, начиная трогания с места с определением направления движения.
Технический результат достигается за счет применения двух последовательных радиолокаторов малого радиуса действия, размещенных в подкузовном пространстве локомотива, а в качестве маркеров по геометрии ж/д пути выбраны накладки крепления рельсов к шпалам и оптимальной обработки отраженных от маркеров сигналов.
Для решения поставленной задачи предлагается способ и система определения скорости локомотива и направления движения, основанный на применении - использовании искусственных ориентиров - маркеров вдоль геометрии ж/д пути в виде накладок для крепления рельсов к шпалам, характеризующийся тем, что по мере движения локомотива излучающей по двум последовательным каналам зондирующие радиолокационные сигналы, принимают отраженные от меток ответные сигналы и, зная расстояние-базу между зондирующими - приемными каналами, а так же засекают время между проходом ответных импульсов от текущей метки по каждому каналу по формуле:
где  (расстояние между каналами) t - время прохода метки
(расстояние между каналами) t - время прохода метки
Определяют скорость локомотива по выражению:  а по последовательности времени прохода каналами метки определяют направление движения, так если последовательность первый-второй канал, то движение вперед, если же второй-первый, то назад; при движении с места все отсчеты проводят по второй метке.
а по последовательности времени прохода каналами метки определяют направление движения, так если последовательность первый-второй канал, то движение вперед, если же второй-первый, то назад; при движении с места все отсчеты проводят по второй метке.
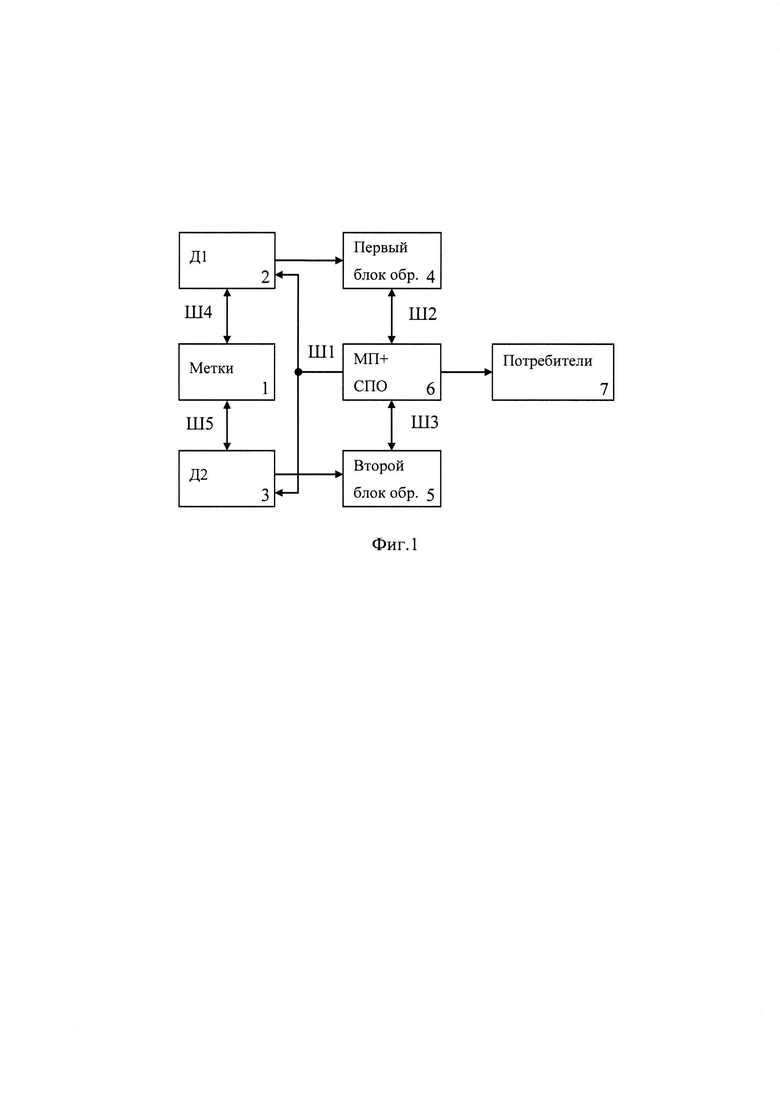
На фиг. 1 изображена структурная электрическая схема системы, на которой показано:
1) накладки для крепления рельсов к шпалам (они же маркерные метки);
2) первый радиолокационный датчик (Д1);
3) второй радиолокационной датчик (Д2);
4) первый блок обработки отраженных сигналов от меток (БОС 1);
5) второй блок обработки отраженных сигналов от меток (БОС2);
6) микроконтроллер (МК);
7) потребители сигналов скорости и направления движения;
8) шины управления и синхронизации (Ш1);
9) двунаправленные шины связи (Ш2 и Ш3);
10) Ш4 и Ш5 - диаграммы направленности датчиков Д1 и Д2.
Блок питания условно не показан.
Схема имеет следующие соединения.
Первый Д1 и второй Д2 радиолокационные датчики зондирующими и отраженными сигналами шинами Ш4 и Ш5 связаны с метками 1, а выходы датчиков Д1 и Д2 через БОС1 и БОС2 соответственно связаны с первым и вторым входами микроконтроллера 6; первый выход которого шиной Ш1 связан с управляющими и синхронизирующими входами первого и второго датчиков Д1 и Д2; второй выход МК6 сигналами скорости и направления движения связан с их потребителями.
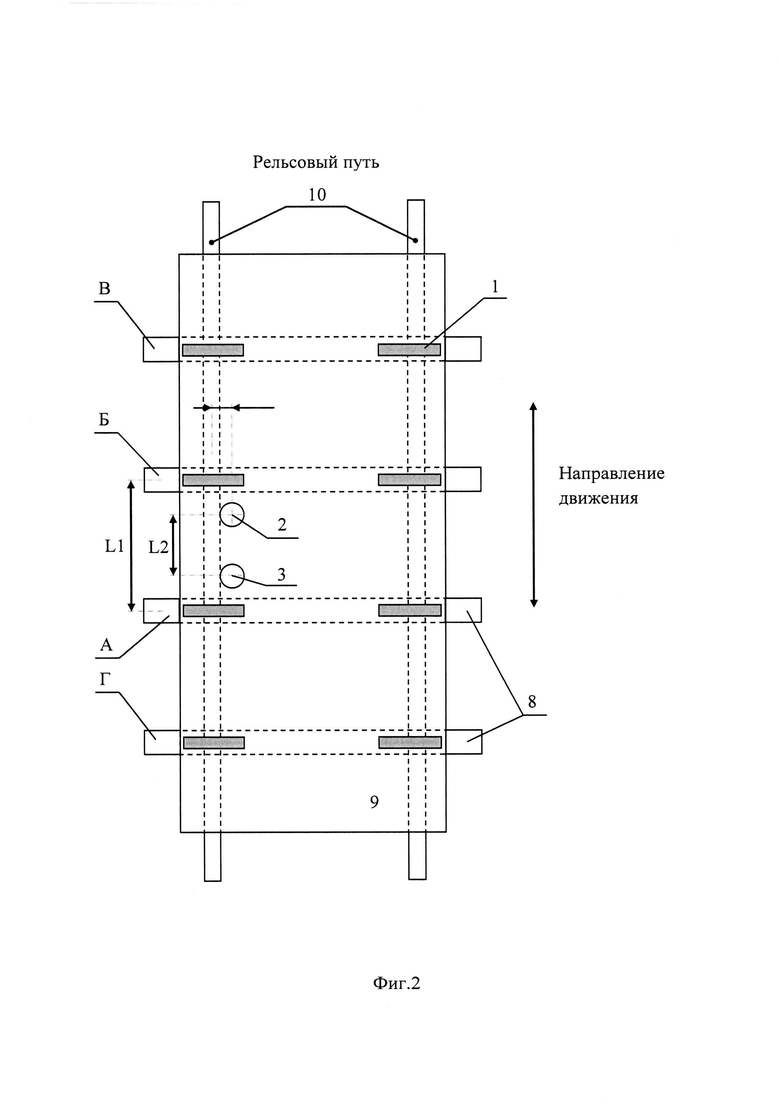
На фиг. 2 показана схема расположения составных частей системы относительно друг другу, геометрии ж/д пути и подкузовного пространства локомотива на которой изображено:
1 - накладки для крепления рельсов (8 шт);
2 и 3 - первый и второй датчики Д1 и Д2;
8 - шпалы (6 шт);
9 - подкузовное пространство;
10 - рельсовый путь;
А, Б, В, Г - обозначение шпал;
L1 - расстояние между центральными продольными осями соседних шпал (также и накладок);
L2 - расстояние между датчиками;
L3 - расстояние крепления датчиков относительно внутренней головки рельса;
Все расстояния и взаимное расположение даны условно.
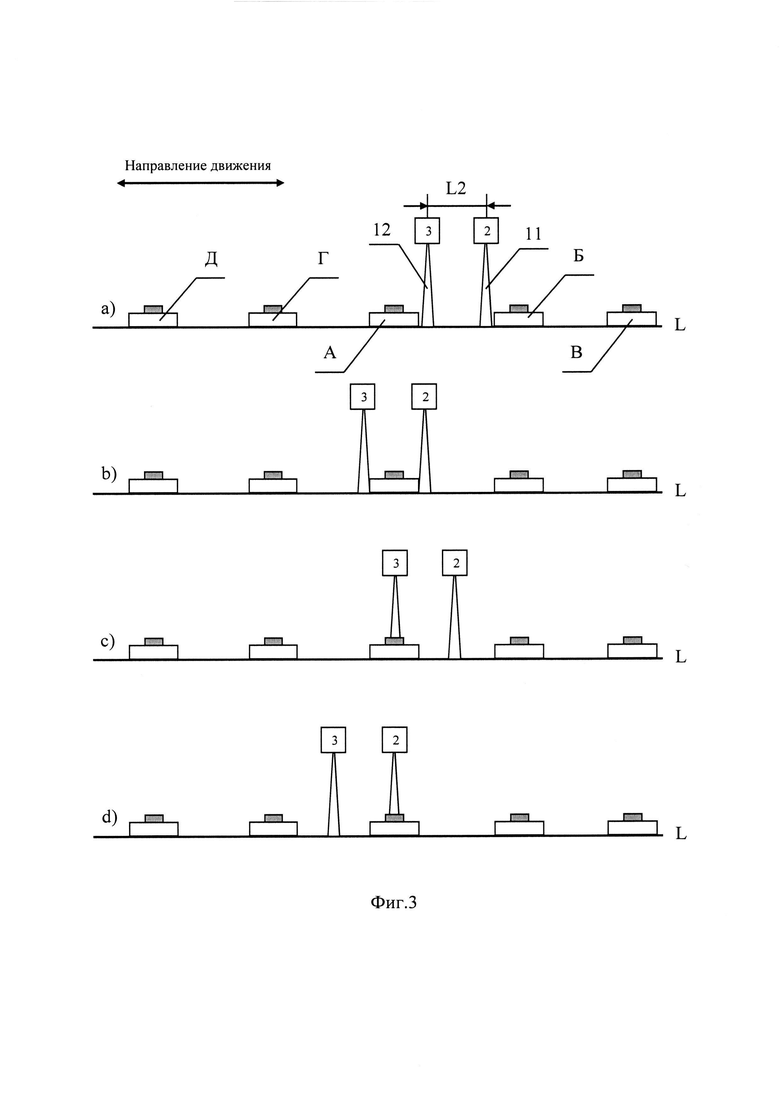
На фиг. 3 показаны расположения первого (2) и второго (3) датчиков относительно ж/д шпал на стоянке локомотива, на которых изображено:
А, Б, В и Г - шпалы с накладками
11 и 12 - диаграммы направленности первого и второго датчиков соответственно
a) расположение датчиков между соседними шпалами А и Б;
b) расположение датчиков по обе стороны шпалы А;
c) расположение первого датчика с правой стороны около шпалы А, а второго - прямо над шпалой А;
d) расположение первого датчика прямо над шпалой А, второго - слева от шпалы А.
L - линия ж/д пути.
Система работает следующим образом. В основу работы положен принцип радиолокационного обнаружения по ходу локомотива естественных маркеров по геометрии ж/д пути, а именно накладок для крепления рельсов к шпалам. Для чего в подкузовном пространстве локомотива расположены два радиолокационных датчика следующим образом: последовательно по оси локомотива с краю, а их проекции на рельсовое полотно совпадают с накладками с внутренней или внешней стороны рельса, расстояние между датчиками чуть меньше или равно расстоянию между соседними шпалами, т.е. чуть меньше 50 см (45-49).
По ходу движения локомотива датчики излучают зондирующие радиолокационные сигналы с узкой диаграммой направленности строго вниз на ж/д полотно. По мере движения датчики последовательно проходят над балластом и накладками, от которых получают отраженные сигналы, причем от балласта и шпал их мощность минимальна, а от накладок в децибелы выше. Заметим, что от датчиков не требуется ни определения расстояния до накладок, ни определения угла места, а только наличие отраженных от накладок сигналов.
Полученные отраженные сигналы обрабатываются в датчиках в формате логики, т.е. итоговый результат обработки представляет собой лог.0, если датчик находится вне накладки, и лог.1, если над ней.
Эти сигналы поступают на микроконтроллер, который по логической единице от первого датчика (см. фиг. 3, поз.а) движение вперед до шпалы Б) начинает отсчет времени.
Когда второй датчик достигнет шпалы Б, микроконтроллер получит лог.1, отсчет времени прекращается, а микроконтроллер производит вычисление скорости по известной формуле, в которой известно время Δt и расстояние между датчиками:
Уточнение. Замер времени для расчета от начала движения производится при второй лог.1 от датчика 2 от накладки В (движение вперед) и от накладки Г (движение назад) от датчика 3.
Измерение направления движения происходит также при фиксации второй шпалы по следующему алгоритму: если первым фиксируется датчик 2, то движение вперед, если же датчик 3, то движение назад.
Заметим, что измерение скорости и направления происходит одновременно, а по ней легко вычислить и величину пройденного пути.
Типы применяемых радиолокационных датчиков и виды излучаемых зондирующих сигналов могут быть самыми различными. Основные требования это: малые ГМХ, высокая помехоустойчивость, простое программное обеспечение и малая стоимость.
Предлагаемое техническое решение позволит решить задачу измерения скорости локомотива при любых погодных условиях: дождь, ночь, туман, снегопад, перепад температур и т.д. при высокой точности измерения, недоступной другим способам.
Таким образом, предлагаемое техническое решение полностью соответствует основному экономическому постулату «стоимость -эффективность».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЦИФРОВОЙ Ж/Д КАРТЫ И ПРИМЕНЕНИЕ ЕЁ ДЛЯ МОНИТОРИНГА ДВИЖЕНИЯ ЛОКОМОТИВА | 2020 |
|
RU2769100C2 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| Измеритель скорости локомотива | 2022 |
|
RU2793551C1 |
| Система определения скорости локомотива | 2023 |
|
RU2809393C1 |
Изобретение относится к измерительной технике, а именно к радиолокации, и может быть использовано на железных дорогах (ж/д) для определения таких параметров движения локомотива, как мгновенная скорость, пройденный путь, направление движения. Техническим результатом является повышение точности измерения скорости движения локомотива на ж/д пути, особенно на малых скоростях, начиная с трогания с места, с определением направления движения. Технический результат достигается за счет применения в заявленной системе определения скорости локомотива и направления движения двух последовательных радиолокаторов малого радиуса действия, размещенных в подкузовном пространстве локомотива, а также маркеров по геометрии ж/д пути, представляющих собой накладки крепления рельсов к шпалам с обработкой отраженных от маркеров сигналов. 3 ил.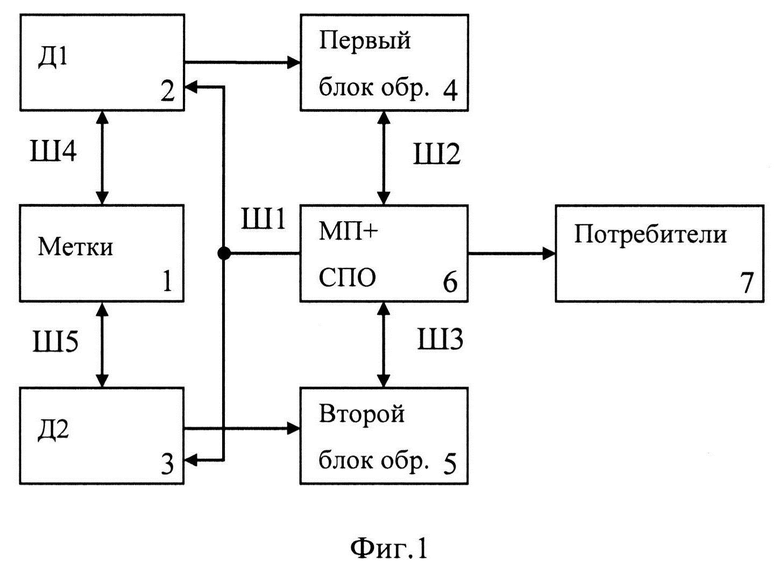
Система определения скорости локомотива и направления движения, содержащая маркеры на геометрии ж/д пути, первый и второй радиолокационные датчики, соответственно, первый и второй блоки обработки отраженных сигналов - БОС, микроконтроллер, шину управления и синхронизации, две двунаправленные шины связи и потребители сигналов скорости и направления движения со следующими соединениями: первый и второй радиолокационные датчики зондирующими и отраженными сигналами шинами и связаны с метками, а выходы датчиков через первый и второй БОС, соответственно, связаны с первым и вторым входами микроконтроллера, первый выход которого шиной связан с управляющими и синхронизирующими входами первого и второго датчиков; второй выход микроконтроллера сигналами скорости и направления движения связан с их потребителями.
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| АВТОНОМНОЕ БОРТОВОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ РЕЛЬСОВОГО ЭКИПАЖА (ВАРИАНТЫ) | 2005 |
|
RU2282197C1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ПРОЙДЕННОГО ПУТИ | 2008 |
|
RU2378654C1 |
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
| МАРЮХНЕНКО В.С., ГУРУЛЁВА М.А | |||
| Особенности применения радиолокационных измерителей скорости подвижных объектов железнодорожного транспорта // Вестник Иркутского государственного | |||

