Изобретение относится к измерительной технике, а именно к радиолокации, и может быть использовано на железных дорогах (ж/д) для определения параметров движения локомотива таких, как мгновенная скорость, пройденный путь, направление движения.
Общей проблемой на ж/д транспорте является измерения малых скоростей движения с начала трогания с места и в самом конце движения, вплоть до остановки. Это объясняется тем, что для измерения скорости применяются механические датчики, которые обладают значительной погрешностью измерения, кроме того, при пробуксовке и юзе они не работоспособны.
Известны автодинные радиолокаторы малого радиуса действия с частотной модуляцией, которые нашли широкое применения на ж/д транспорте в качестве измерителей параметров движения вагонов на сортировочных горках, локомотивах относительно полотна дороги, обнаружителей занятости стрелочных переводов и ж/д переездов, датчиков предупреждения столкновений и многое другое, см. Носков В.Я. и «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазона и их применение» ч. 9 «Радиолокационное применение автодинов. Успехи современной радиоэлектроники», 2016, №3, стр. 32-80.
Недостаток: большая сложность, недостаточная точность из-за большой интерференции сигналов.
Также известен патент РФ №2378654 от 10.01.2010 г. «Локомотивная система определения скорости движения и пройденного пути», которая содержит три приемно излучающие устройства, каждое из которых включает блок СВЧ-излучателя с передающей антенной и приемный блок отраженного СВЧ-излучения с приемной антенной и усилителем и программируемый микропроцессор с двумя блоками корреляционно-экстремальной обработки. Все приемоизлучающие устройства расположены последовательно по продольной симметрии рельса и отраженные сигналы от подстилающего балласта, воспринимаются и анализируются по специальному программному обеспечению.
Недостаток: очень сложное схемное решение за счет применения корреляционной обработки, а также нестабильная работа в экстремальных условиях эксплуатации.
Эта система вообще не применима в высокоскоростных ж/д магистралях, в которых не используются шпалы, а есть только прочное подстилающее основание на всем пути, т.е. нет балласта в обычном смысле этого слова, т.е. нет реперов для отчетов.
В настоящее время намечается тенденция перехода электрического ж/д транспорта на постоянном токе на переменный ток промышленной частоты, это дает значительное повышение эксплуатационных характеристик одновременно с применением управления всеми двигательными (ведущими) колесами локомотива по схеме мотор/колеса от центрального процессора. Это предъявляет повышение требований к измерениям параметров движения как на сверхмалых (0.5-2 м/с), так и на больших скоростях (300-500 км/ч).
Наиболее близким техническим решением является способ пассивной радиолокации, так называемая радиотеплолокация (РТЛ), в которой измеряются координаты объекта за счет приема электромагнитных колебаний, излучаемых объектом.
Недостатки: очень сложная алгоритмическая обработка и как следствие высокая аппаратурная сложность, также большие погрешности измерения. См. книгу "Основы радиотеплолокации" авторы: В. И. Гадзиковский и др., г. Екатеринбург, УГТУ, 2001 г.
Технической задачей изобретения является повышение точности измерения параметров движения локомотива в экстремальных условиях эксплуатации: больших перепадов температур, очень малых скоростях движения и очень высоких, суровых климатических воздействий от пустынь до полярных широт, также вибрационных и ударных нагрузок.
Технический результат достигается за счет применения в качестве маркеров (меток) по геометрии ж/д пути накладок крепления рельсов к шпалам и оптимальной обработки отраженных от маркеров сигналов с применением зондирующих шумоподобных негармонических сверхширокополосных радиолокационных сигналов, называемых радиоосвещением или радиосветом, которые полностью исключают влияние интерференции на точность измерения параметров движения, также как и влияние виброударных нагрузок.
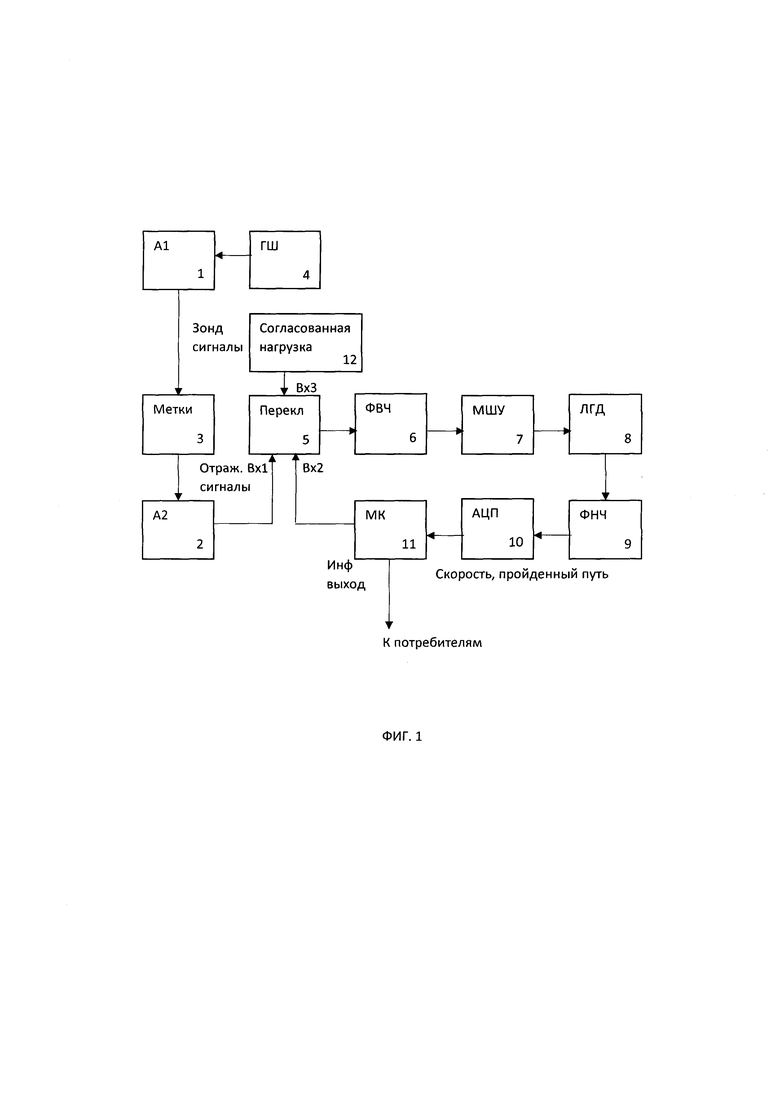
На фиг. 1 изображена структурная электрическая схема устройства по данному способу, на которой показано:
1 - передающая антенна А1
2 - приемная антенна А2
3 - маркеры(метки) накладки на ж/д пути для крепления рельсов к шпалам
4 - генератор шума
5 - переключатель
6 - фильтр высокой частоты (ФВЧ)
7 - малошумящий усилитель (МШУ)
8 - логарифмический детектор (ЛГД)
9 - фильтр низкой частоты (ФНЧ)
10 - АЦП
11 - микроконтроллер (МК)
12 - согласованная нагрузка (СН)
Схема имеет следующие соединения.
Генератор шума 4 соединен с передающей антенной А1, которая зондирующими сигналами связана с метками 3, последние в свою очередь отраженными сигналами связаны с первым входом переключателя 5, выход которого через последовательно соединенные ФВЧ 6, МШУ 7, ЛГД 8, ФНЧ 9 и АЦП 10 соединен с МК 11, его управляющий выход соединен со вторым входом переключателя 5, выход согласованной нагрузки 12 соединен с третьим входом переключателя, а информационный выход МК 11 является выходом устройства сигналами мгновенной скорости и величиной пройденного пути.
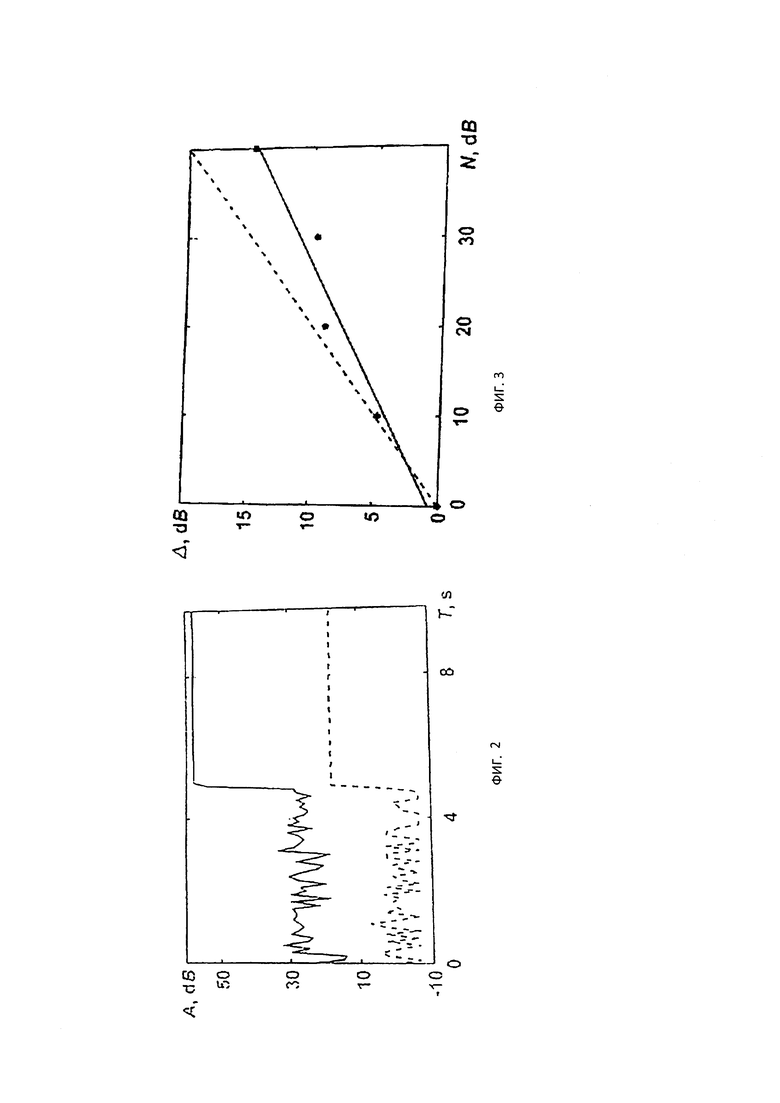
На фиг. 2 изображены кривые влияния накопителя на характер работы приемника:
- пунктирная кривая без использования накопителя
- сплошная линия с накопителем
На фиг. 3 изображены кривые зависимости выигрыша для отношения сигнала шум от накопителя.
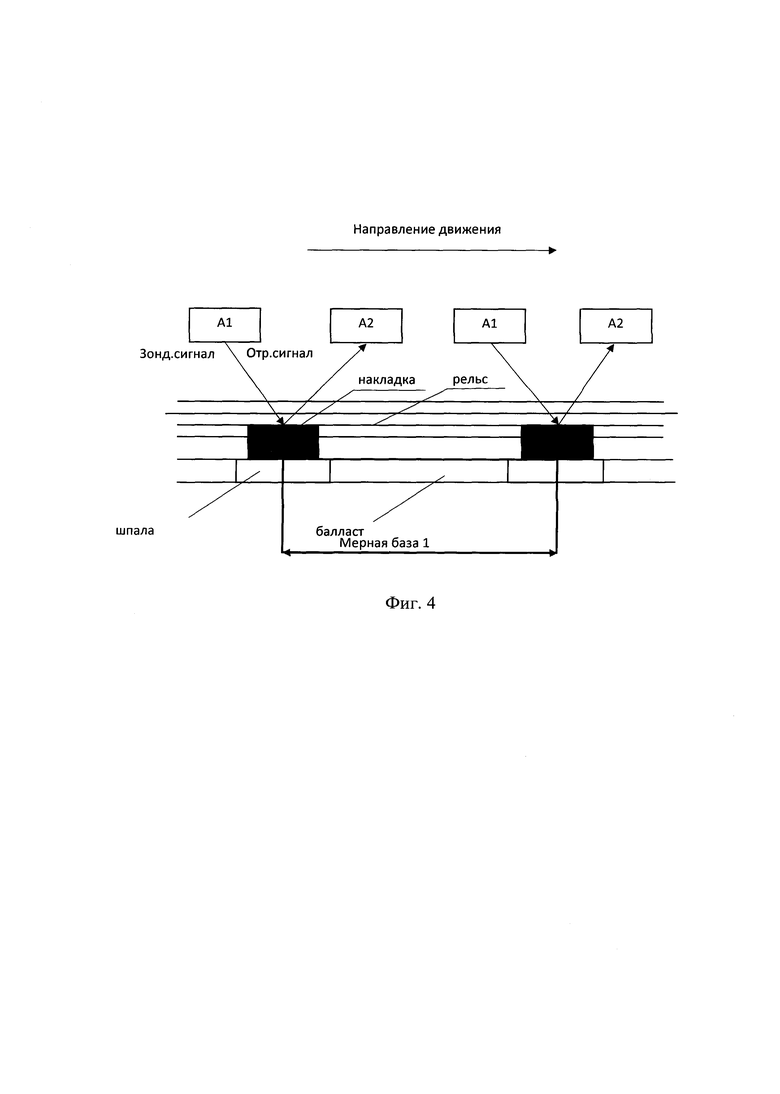
На фиг. 4 изображено положение антенн и ход лучей при движении локомотива относительно двух накладок при использовании одного канала измерения.
На фиг. 5 изображено положение антенн и ход лучей при использовании двух каналов измерения, где А1 и А2 антенны одного канала, А3(А1) и А4(А2) обозначают исходное положение антенн второго канала, а (А1) и (А2) положение антенн первого канала в движении и прохода над накладкой.
Под радиоосвещением будем понимать локальное, искусственно созданное шумовое (шумоподобное) поле широкополосного (сверхширокополосного) некогерентного в пространстве и во времени излучения в радио или микроволновом диапазоне длин волн. Радиоосвещение реализуется при помощи одного или нескольких устройств некогерентного излучения. Попадая на близлежащие поверхности и предметы, микроволновое излучение частично поглощается в них, частично проходит через них и частично отражается. Тем самым, распространяясь, далее оно несет в себе информацию о среде, с которой взаимодействует. В этом отношении ситуация аналогична ситуации с обычным (видимым) светом. Разница в том, что это другой частотный диапазон и другие законы взаимодействия со средой, в которой происходит процесс. Кроме того, для обычного света имеется такой замечательный инструмент наблюдения как глаз. Для извлечения информации об объектах, находящихся в зоне радиоосвещения (радиосвета) нужны специальные датчики или системы таких датчиков.
Сходство между светом и обычным светом достаточно глубокое. В обоих случаях речь идет о некогерентном излучении с широким спектром, что исключает эффекты интерференции и сводит вопросы наблюдения к оценке мощностных (и возможных спектральных, как в случае цветового зрения) характеристик принимаемого сигнала. Принципиальной особенностью радиосвета по отношению к обычному свету является громадная разница в характерной области частот (примерно на пять порядков) для света и радиосвета. Последнее означает существенно более низкую потенциальную разрешающую способность при использовании радиосвета по сравнению с видимым светом.
Устройство с одним каналом измерения работает следующим образом. В подкузовном пространстве локомотива расположены антенны А1 и А2 на расстоянии S, равном 45-50 см друг от друга последовательно по ходу движения. Диаграммы направленности (ДН) антенн направлены под определенным углом вниз на ж/д полотно сбоку от одного из рельс таким образом, что ДН не захватывают сам рельс.
При движении зондирующие сигналы отражаются от балласта и шпал и накладок (меток), в первом случае отраженный сигнал мал по мощности, в отличии от второго случая, см. фиг. 2. При отражении от накладок засекается время, и при прохождении следующей накладки снова засекается время, этот отсчет At и, зная расстояние S между накладками, которое = Const, вычисляем мгновенную скорость по формуле:
где S - расстояние между накладками
Δt - время прохождения между двумя накладками.
Пройденный путь определяется выражением:
Приемник радиосвета должен «уметь» измерять полную мощность проходящего СШП шумоподобного излучения. При этом от него требуется достаточно высокая чувствительность и большой динамический диапазон измеряемой интенсивности сигнала. Существенным параметром является также степень инерционности приемника или время накопления сигнала. Этот параметр тесно связан с чувствительностью приемника: чем больше накопление, тем меньший по мощности приходящий сигнал может быть зафиксирован. С другой стороны, степень инерционности приемника напрямую связана с возможностью его применения в мобильных условиях и лимитирует максимальную возможную скорость передвижения наблюдаемого объекта.
Исходя из этого сформулируем требования к приемнику радиосвета:
- полоса частот принимаемого сигнала должна соответствовать полосе частот излучаемого сигнала;
- время накопления сигнала 0.001-0.1 с, что позволит использовать приемник в ситуациях с относительными скоростями движения объектов от 1000 до 10 м/с;
- динамический диапазон по мощности принимаемого сигнала - не менее 40 dB, что позволит обеспечить работоспособность при изменении диапазона во время накопления сигнала. Этот параметр тесно связан с чувствительностью в свободном пространстве между приемником и источником сигнала на менее чем в 100 раз.
Ближайшим по своим свойствам устройствами, которые можно использовать в качестве прототипов приемников радиосвета, являются радиометрические приемники и энергетические приемники, используемые в прямохаотичных системах связи.
Радиометрические приемники, как правило, имеют очень хорошие (с точки зрения требований к приемникам радиосвета) характеристики по чувствительности, но им свойственны узкий динамический диапазон и значительная инерционность.
Энергетические приемники применяются для цифровой передачи данных. Они регистрируют быстро изменяющиеся поступающие сигналы (т.е. малоинерционные) и имеют большой динамический диапазон, но значительно уступают радиометрам по чувствительности.
Предлагаемый приемник радиосвета сочетает в себе полезные свойства радиометрических и энергетических приемников.
Для увеличения динамического диапазона устройства вместо типичного для радиометрических приемников квадратичного детектора используется логарифмический детектор с малошумящими полосовыми усилителями на входе. Сигнал с выхода фильтра нижних частот детектора подается на вход аналого-цифрового преобразователя и обрабатывается микроконтроллером. Использование АЦП вместо порогового устройства - основное аппаратное отличие от приемников сверхширокополосных радиоимпульсов в средствах прямохаотической связи.
Микроконтроллер осуществляет накопление сигнала для увеличения отношения сигнал/шум, С этой целью сигнал с выхода фильтра нижних частот оцифровывается через интервалы времени Δτ, превышающее время корреляции  шумов на входе фильтра
шумов на входе фильтра  и полученные отсчеты суммируются в цикле от 1 до N. После этого цикл накопления завершается, выводится результат, обрабатывается полученное значения суммарного сигнала и цикл повторяется. Таким образом, выдача значения сигнала на отображающее устройство производится через каждые N×Δτ секунд. При этом уровень сигнала на выходе ячейки повышается по отношению к уровню сигнала на выходе ФНЧ фильтра (что соответствует однократному измерению отсчета) в N раз, теоретически чувствительность приемника увеличивается в
и полученные отсчеты суммируются в цикле от 1 до N. После этого цикл накопления завершается, выводится результат, обрабатывается полученное значения суммарного сигнала и цикл повторяется. Таким образом, выдача значения сигнала на отображающее устройство производится через каждые N×Δτ секунд. При этом уровень сигнала на выходе ячейки повышается по отношению к уровню сигнала на выходе ФНЧ фильтра (что соответствует однократному измерению отсчета) в N раз, теоретически чувствительность приемника увеличивается в  раз, а дальность приема в свободном пространстве увеличивается в
раз, а дальность приема в свободном пространстве увеличивается в  Однако растет и время наблюдения в N раз. Отсюда при выборе параметров функционирования устройства необходимо выбирать между повышением чувствительности приемной ячейки за счет накопления и возрастанием при этом ее инерционности. Использование микроконтроллера позволяет выбрать разумный компромисс при решении каждой конкретной задачи. Так, например, при визуальном наблюдении за силой сигнала время накопления может быть того же порядка, что и при смене последовательных кадров в телевизионном изображении (25-100 кадров в секунду), а для фиксации достаточно медленных изменений принимаемого излучения оно может достигать одной или нескольких секунд. По существу, от устройства измерения параметров движения (в частности скорости) потребуется только обнаружение меток, как видно из фиг. 2 левая часть - это отсутствие метки, а правая часть - наличие, можно сказать левая часть это лог. 0 а правая лог. 1, что очень удобно для вычислений в МК 11.
Однако растет и время наблюдения в N раз. Отсюда при выборе параметров функционирования устройства необходимо выбирать между повышением чувствительности приемной ячейки за счет накопления и возрастанием при этом ее инерционности. Использование микроконтроллера позволяет выбрать разумный компромисс при решении каждой конкретной задачи. Так, например, при визуальном наблюдении за силой сигнала время накопления может быть того же порядка, что и при смене последовательных кадров в телевизионном изображении (25-100 кадров в секунду), а для фиксации достаточно медленных изменений принимаемого излучения оно может достигать одной или нескольких секунд. По существу, от устройства измерения параметров движения (в частности скорости) потребуется только обнаружение меток, как видно из фиг. 2 левая часть - это отсутствие метки, а правая часть - наличие, можно сказать левая часть это лог. 0 а правая лог. 1, что очень удобно для вычислений в МК 11.
Во втором варианте задействовано два идентичных канала. При этом каналы расположены последовательно в подкузовном пространстве локомотива вдоль рельса на расстоянии между приемными антеннами чуть меньше, чем расстояние между накладками.
Алгоритм работы следующий. При проходе приемной антенны первого канала над накладкой начинается отсчет времени, при проходе приемной антенны второго канала над этой же накладкой отсчет времени заканчивается, для этого микроконтроллеры обоих каналов связаны между собой. Зная этот временной отрезок Δt и зная расстояние между приемными антеннами, вычисляется в одном из микроконтроллеров (назовем его ведущим) мгновенная скорость локомотива по известному выражению
 где:
где:
L - расстояние между приемными антеннами = Const
Δt - временный отрезок прохождения приемными антеннами каждого канала одной и той же накладки = VAR.
Пройденный путь определяется следующим выражением:
Заметим, что второй вариант несколько точнее, а это важно при измерении скорости и пройденного пути для высокоскоростных поездов.
Также отметим, что данный способ не имеет такого недостатка, как вредное влияние интерференции, присущее когерентным радиолокационным способам, т.к. он основан на приеме энергетической составляющей отраженного сигнала (в отличие от амплитудного, фазового и др.). Еще одно полезное свойство данного способа: он не подвержен влиянию вибрационных, ударных и других видов помех, как и влиянию суровых климатических условий в силу той же энергетической составляющей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ЛОКОМОТИВА И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2021 |
|
RU2769956C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЦИФРОВОЙ Ж/Д КАРТЫ И ПРИМЕНЕНИЕ ЕЁ ДЛЯ МОНИТОРИНГА ДВИЖЕНИЯ ЛОКОМОТИВА | 2020 |
|
RU2769100C2 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2018 |
|
RU2726287C1 |

Изобретение относится к измерительной технике, а именно к радиолокации. Технической задачей изобретения является повышение точности измерения параметров движения локомотива в экстремальных условиях эксплуатации: больших перепадов температур, очень малых скоростях движения и очень высоких, суровых климатических воздействий от пустынь до полярных широт, также вибрационных и ударных нагрузок. Такой результат достигается тем, что устройство определения параметров движения локомотива содержит передающую и приемные антенны, генератор шума, метки, переключатель, фильтр высокой частоты - ФВЧ, малошумный логарифмический детектор - ЛГД, фильтр низкой частоты - ФНЧ, согласованную нагрузку, АЦП и микроконтроллер - МК со следующими соединениями: генератор шума соединен с передающей антенной, которая зондирующими сигналами связана с метками, последние, в свою очередь, отраженными сигналами связаны с первым входом переключателя, выход которого через последовательно соединенные ФВЧ, МШУ, ЛГД, ФНЧ и АЦП соединен с МК, его управляющий выход соединен со вторым входом переключателя, выход согласованной нагрузки соединен с третьим входом переключателя, а информационный выход МК является выходом устройства сигналами мгновенной скорости и величиной пройденного пути, в качестве маркеров по геометрии ж/д пути применены накладки крепления рельсов к шпалам и применены зондирующие шумоподобные гармонические сверхширокополосные радиолокационные сигналы, называемые «радиосветом». 2 н.п. ф-лы, 5 ил.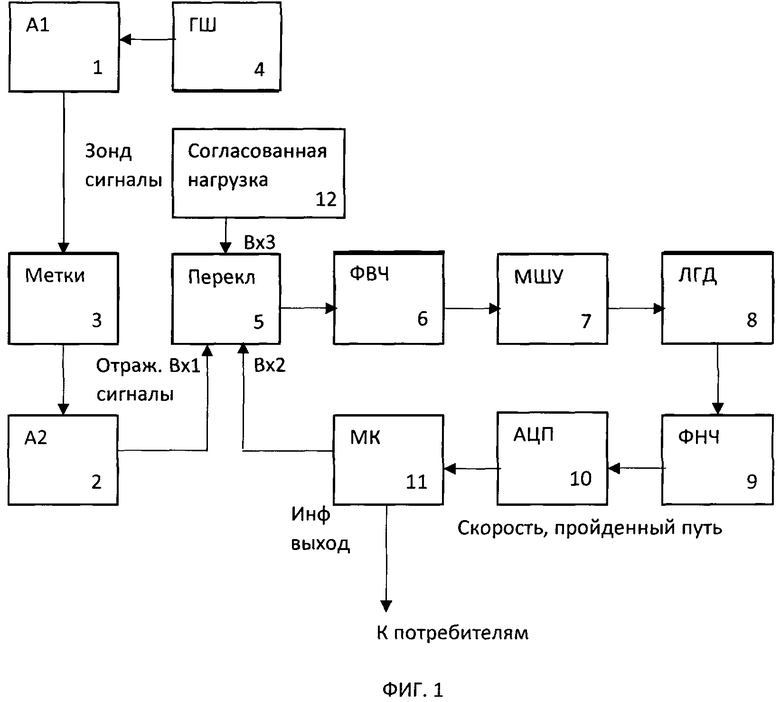
1. Способ определения параметров движения локомотива, основанный на использовании радиолокационных некогерентных сверхширокополосных сигналов динамического хаоса микроволнового диапазона - «радиосвета», а также на использовании искусственных ориентиров-маркеров по геометрии ж/д пути в виде накладок крепления рельсов к шпалам, заключающийся в том, что по мере движения локомотива излучают зондирующие сигналы «радиосвета» на подстилающее ж/д полотно, получают ответные отраженные сигналы от балласта, шпал и маркеров, а по мощности их характеристик по всему пути следования локомотива находят маркерные точки, производят отсчет времени между соседними маркерными точками, засекая время при отражении сигнала от маркера и при прохождении следующего маркера, и, зная расстояние между ними, вычисляют мгновенную скорость по формуле:
 где
где
ΔV - искомая мгновенная скорость;
S - расстояние между накладками постоянно;
Δt - время прохождения между двумя соседними накладками отраженными сигналами, переменное,
путь вычисляется по формуле:
 где
где
ΣΔν - сумма мгновенных скоростей;
ΣΔt - сумма мгновенных времен определения параметров локомотива.
2. Устройство определения параметров движения локомотива, включающее: передающую и приемные антенны, генератор шума, метки, переключатель, фильтр высокой частоты - ФВЧ, малошумный логарифмический детектор - ЛГД, фильтр низкой частоты - ФНЧ, согласованную нагрузку, АЦП и микроконтроллер - МК со следующими соединениями: генератор шума соединен с передающей антенной, которая зондирующими сигналами связана с метками, последние, в свою очередь, отраженными сигналами связаны с первым входом переключателя, выход которого через последовательно соединенные ФВЧ, МШУ, ЛГД, ФНЧ и АЦП соединен с МК, его управляющий выход соединен со вторым входом переключателя, выход согласованной нагрузки соединен с третьим входом переключателя, а информационный выход МК является выходом устройства сигналами мгновенной скорости и величиной пройденного пути, в качестве маркеров по геометрии ж/д пути применены накладки крепления рельсов к шпалам и применены зондирующие шумоподобные гармонические сверхширокополосные радиолокационные сигналы, называемые «радиосветом».
| ЛОКОМОТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ПРОЙДЕННОГО ПУТИ | 2008 |
|
RU2378654C1 |
| RU 2017142224 A, 04.12.2017 | |||
| RU 2008122856 A, 20.12.2009 | |||
| АВТОНОМНОЕ БОРТОВОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ РЕЛЬСОВОГО ЭКИПАЖА (ВАРИАНТЫ) | 2005 |
|
RU2282197C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

