Изобретение относится к медицине и может быть использовано для реабилитации больных с патологией центральной нервной системы и двигательными нарушениями верхних конечностей.
Известен «Кистевой эспандер» патент RU №2015708, кл. А 63 В 23/16 автора Потапова Н.А., опубл. в БИ №13, 94 г.
Устройство содержит две угловые планки, расположенные параллельно с обращением вершин в одну сторону. Планки связаны между собой поперечными планками шарнирно с образованием шарнирного параллелограмма. В шарнирах могут быть установлены регуляторы нагрузки и шага усилий. При тренировке обе планки захватывают кистями и производят их сжатие одновременно обеими руками или попеременно.
Недостатком данного известного устройства являются ограниченные возможности, обусловленные чисто механической тренировкой или реабилитацией кистей рук пациента.
Наиболее близким к заявленному устройству является известное устройство для реабилитации, содержащее ручной тренажер, тензодатчики, блок предварительного сбора и обработки информации и персональный компьютер для сбора, обработки и хранения информации (см. RU 2218086 С1, А 61 В 5/22, 10.12.2003).
При создании данного изобретения решалась задача создания устройства для реабилитации с биологической обратной связью (БОС).
Техническим результатом при решении данной задачи является расширение функциональных возможностей заявляемого устройства, что ведет к сокращению сроков реабилитации пациентов с поражением центральной нервной системы и двигательными нарушениями.
Указанный технический результат достигается тем, что устройство для реабилитации, включающее ручной пружинный тренажер дополнительно содержит куклу-марионетку, соединенную с тренажером, блок управления, расположенный под кистью пациента, персональный компьютер для сбора, обработки и хранения информации. Ручной пружинный тренажер и блок управления расположены на подлокотнике кресла пациента. Заявленное устройство может быть снабжено блоком зрительной связи, расположенным напротив кресла пациента и блоком звуковой связи. Блок управления содержит тензодатчики, датчики параметров среды, электронную систему для предварительного сбора и обработки информации. Заявленное устройство также может быть снабжено принтером для получения информации на бумажном носителе.
Введение куклы-марионетки, соединенной с ручным пружинным тренажером позволяет реализовать кинематическую модель для развития мелкой моторики пальцев с управляемыми параметрами биологической обратной связи (БОС) - зрительной и звуковой.
Значительная распространенность заболеваний нервной системы, травм и опухолей, сложность и стойкость нарушений функции, сопровождающихся длительной утратой трудоспособности, ставят проблему реабилитации в неврологии и нейрохирургии в ряд важнейших медикосоциальных проблем. Восстановление движений при парезах, возникающих в результате поражений центральной нервной системы, несмотря на значительные достижения в области нейрореабилитации, до сих пор остается актуальной проблемой, требующей решения на новом теоретическом и техническом уровне. По данным многочисленных публикаций, достаточно успешным является применение при реабилитации БОС. Под БОС понимается комплекс процедур, в ходе которых пациенту посредством контура внешней обратной связи подается информация о состоянии тех или иных физиологических процессов с целью обучения «сознательному» управлению этими процессами. Биоуправление с обратной связью позволяет пациенту добиться контроля (самоконтроля) над параметрами этих процессов, вызывать и закреплять этот контроль в требуемом направлении. Заявленное устройство позволяет «синтезировать» два метода - двигательное (механическое) восстановление утраченной мелкой моторики рук и арттерапевтический метод психотерапии - игра с куклой-марионеткой. В данном случае марионетку можно рассматривать как проективный объект переноса и выражения эмоций. В заявленном устройстве марионетка используется как один из управляемых параметров БОС. Чем тоньше, разнообразнее и координированнее становятся движения восстанавливаемой конечности, тем больше движений совершает кукла-марионетка. Пациенту представляется звуковой, тактильный управляемый сигнал через тензометрические датчики и зрительный управляемый сигнал - движение марионетки, отражаемое в зеркале или на мониторе. Кукла-марионетка выступает в виде внешнего управляемого объекта, позволяющего вынести во вне движения пациента, а следовательно, сделать их более контролируемыми со стороны сознания, что дает возможность более эффективно использовать принцип БОС. Блок управления, расположенный под кистью пациента и персональный компьютер, позволяют собрать, обработать, сохранить информацию в процессе курса реабилитации. Сочетание психотерапевтического и функционального приемов при реабилитации расширяют ее функциональные возможности, позволяют улучшить качество реабилитации и значительно, на 20-30%, сократить сроки реабилитации.
На фиг.1 изображено заявленное устройство для реабилитации.
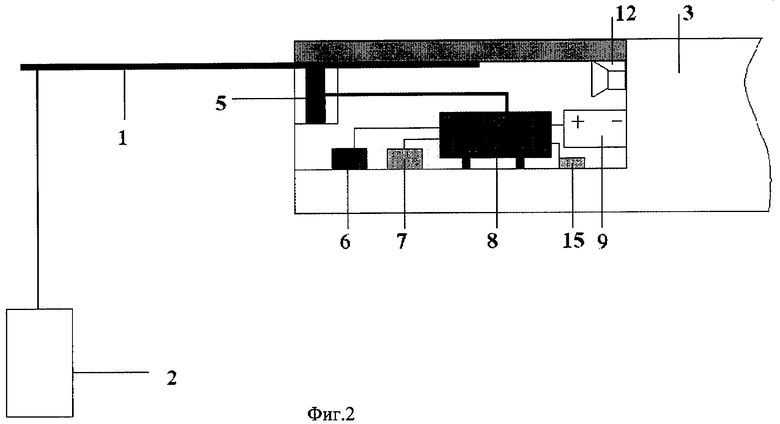
На фиг.2 изображен блок управления заявленного устройства.
На фиг.3 изображена часть устройства с пациентом, поясняющее принцип действия заявленного устройства.
Устройство для реабилитации содержит ручной пружинный тренажер 1, куклу-марионетку 2, соединенную с тренажером, блок управления 3, расположенный под кистью пациента, персональный компьютер 4 для сбора, обработки и хранения информации. Блок управления 3 содержит тензодатчики 5, датчики параметров среды 6, 7, электронную систему 8 для предварительного сбора и обработки информации. Ручной пружинный тренажер 1 и блок управления 3 расположены на подлокотнике кресла 10 пациента. Устройство для реабилитации может быть снабжено блоком зрительной связи 11, расположенном напротив кресла 10 пациента и блоком звуковой связи 12, кроме того, заявленное устройство содержит принтер 13 для получения информации на бумажном носителе, кабель связи 14 и разъем под кабель связи 15 и элементы питания 9.
В примере реализации заявленного устройства ручной тренажер связан с блоком управления, заключенным в корпус, где размещены тензодатчики или датчики усилия типа FSL05N2C, датчики параметров среды, включающие датчик давления типа 40PC015G1A и датчик температуры HEL700-U-1-A, блок звуковой связи в виде микрофона марки ТА-56М и элементы питания - аккумуляторы УР1,2-6. Электронная система для предварительного сбора и обработки информации на базе микроконтроллера типа PIC 16F876-201/SP через разъем типа PC по многожильному кабелю передает предварительную информацию на персональный компьютер PENTIUM-4, где эта информация окончательно обрабатывается и хранится. При необходимости эту информацию можно распечатать на принтере HP-1300. В качестве блока зрительной связи можно использовать зеркало размером 500×600 мм, либо видеокамеру с монитором марки SONY. Марионетка подбирается индивидуально по реабилитационному курсу исходя из возраста и состояния пациента. При групповой реабилитации возможно театрализованное представление.
Работает заявленное устройство следующим образом.
Пациент, удобно расположившись в кресле 1, помещает руку на подлокотник кресла, где закреплен пружинный механизм с блоком управления 3. Надавливает пальцами на элементы пружинного механизма, соединенными с помощью нитей с элементами куклы марионетки 2, управляя тем самым движениями куклы марионетки. Чем разнообразнее и сильнее движения пальцев, тем разнообразнее движения куклы-марионетки. Давление пальцев через пружинный тренажер передается на тензодатчики 5. Сигналы с тензодатчиков предварительно обрабатываются электронной системой 8 и по кабелю связи 14 передается на персональный компьютер. Компьютер эти предварительные данные записывает в память, окончательно обрабатывает и выдает на дисплее информацию (данные по усилию и углу наклона пружиной пластины) в виде графика или гистограммы, показывая тем самым динамику движения пальцев (усилие и угол наклона). Пациент наблюдает за движениями куклы марионетки с помощью блока зрительной связи 11, представляющего собой зеркало или видеокамеру с мониторами. Данным образом осуществляется зрительная БОС.
Совершая движения пальцев с запрограммированными послепороговыми усилиями пациент включает блок звуковой связи 12 между движениями пальцев и движениями куклы марионетки. Таким образом осуществляется звуковая БОС. Блок звуковой связи, состоящий из микрофона и электронной системы, размещен в блоке управления 3. Информация с блока звуковой связи также по кабелю связи 14 передается в персональный компьютер 4.
Результаты процесса реабилитации пациентов с поражениями центральной нервной системы существенно метеозависимы. Поэтому в блоке управления размещена система контроля параметров окружающей среды - атмосферного давления и температуры. Эта система включает в себя датчики атмосферного давления 6, температуры 7 и электронную систему для предварительной обработки и передачи данных по кабелю связи 14 в компьютер 4, где они окончательно обрабатываются и хранятся.
Элементы питания 9 систем тензодатчиков, звуковой связи, параметров окружающей среды могут располагаться либо в блоке управления, либо в отдельном блоке, соединенном кабелем с блоком управления. Все данные по процессу курса реабилитации хранятся в компьютере и при необходимости могут быть распечатаны с помощью принтера и занесены в медицинскую карту пациента. Устройство позволяет вести как индивидуальные занятия по реабилитации, так и групповые, представляющие собой игровой тренинг. Таким образом, заявляемое устройство для реабилитации, обеспечивая биологическую обратную связь сформированную пациентом, по сравнению с прототипом, значительно превосходит его по функциональным возможностям и сокращает сроки реабилитации на 20-30%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для восстановления и развития функций кистей рук | 2014 |
|
RU2617199C2 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ МОТОРИКИ ПАЛЬЦЕВ РУК | 2005 |
|
RU2290909C1 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| РЕАБИЛИТАЦИОННЫЙ ПСИХОФИЗИОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ТРЕНИНГА С ИСПОЛЬЗОВАНИЕМ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ, АУДИОТАКТИЛЬНОЕ ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО И СЕНСОРНОЕ КРЕСЛО | 2004 |
|
RU2289311C2 |
| Способ тренировки и количественной оценки моторики пальцев рук и функционального состояния головного мозга по управлению координированным движением пальцев рук и устройство для его реализации | 2021 |
|
RU2786989C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ПСИХОФИЗИОЛОГИЧЕСКОЕ СОСТОЯНИЕ ЧЕЛОВЕКА И ТРЕНАЖЕРНЫЙ КОМПЛЕКС | 2010 |
|
RU2465940C2 |
| СПОРТИВНЫЙ ТРЕНАЖЕР | 2013 |
|
RU2552977C2 |

Изобретение относится к медицине и может быть использовано для реабилитации больных с патологией центральной нервной системы и двигательными нарушениями верхних конечностей. Устройство для реабилитации включает ручной пружинный тренажер, тензодатчики, персональный компьютер для сбора обработки и хранения информации и куклу-марионетку. Кукла-марионетка соединена с тренажером. Тренажер и тензодатчики расположены под кистью пациента. Изобретение позволяет расширить функциональные возможности заявляемого устройства с биологической обратной связью и сократить сроки реабилитации пациентов. 5 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УСИЛИЯ СЖАТИЯ КИСТИ | 2002 |
|
RU2218086C1 |
| US 5451191 A, 19.09.1995 | |||
| US 5538488 А, 23.07.1996 | |||
| US 5147256 А, 15.09.1992 | |||
| US 5392649 А, 28.02.1995. | |||

