Изобретение относится к области реабилитационной медицины и решает проблему длительной реабилитации людей после травм опорно-двигательного аппарата.
Известен модульный ортопедический аппарат (патент RU 2282430). Устройство для реабилитации включает ручной пружинный тренажер, тензодатчики, персональный компьютер для сбора обработки и хранения информации и куклу-марионетку. Кукла-марионетка соединена с тренажером. Тренажер и тензодатчики расположены под кистью пациента.
Недостатком данного известного устройства является разработка только одной группы суставов, а именно разработки лучезапястного сустава.
Известен также кольцевой пружинный тренажер для укрепления суставов и мышц конечностей (патент RU 2517154). Тренажер относится к устройствам для тренировки суставов и мышц конечностей человека с возможностью использования в бытовых условиях, в физкультурных кабинетах клиник и тренировки спортсменов для развития физической силы конечностей.
Недостатком данного известного устройства является разработка только одной группы суставов, а именно разработки лучезапястного сустава.
Наиболее близким, принятым за прототип, является модульное ортопедическое кресло-тренажер (патент RU 2423961). Каждый из модулей кресла-тренажера представляет собой ложемент для крепления соответствующего сегмента сустава.
Недостатком данного устройства является отсутствие датчиков измерения положения (энкодеров или потенциометров) для плечелоктевых суставов и полное отсутствие датчиков мышечной активности. Также в данной системе отсутствует возможность тренировки лучезапястных суставов.
Роботизированный тренажер для людей с нарушениями функций опорно-двигательного аппарата является усовершенствованием существующих систем реабилитации пациентов после травм верхних конечностей. Это достигается за счет использования новых типов датчиков: датчиков мышечной активности и датчиков положения, которые дают наиболее необходимое представление о состоянии костномышечного аппарата пациента, являющихся дополнительной мерой безопасности при внезапном выходе из строя управляющей системы; за счет одновременного разрабатывания как плечелоктевых суставов, так и лучезапястных суставов; за счет новой разработанной модели нечеткого регулятора, который позволит более плавно регулировать движение всех суставов одновременно.
Работа роботизированного тренажера для людей с нарушениями функций опорно-двигательного аппарата представлена на фиг. 1, фиг. 2 и фиг. 3, фиг. 4, фиг. 5.
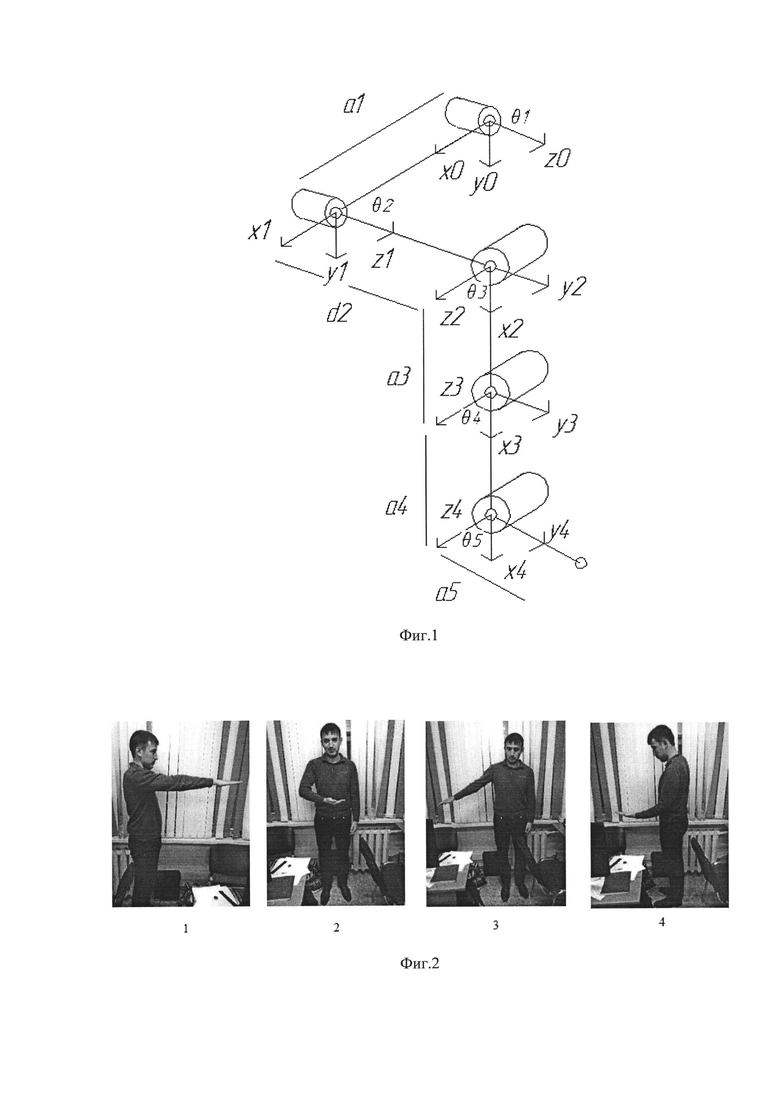
На фиг. 1 изображена кинематическая схема тренажера; фиг. 2 представляет копии фотографий основных движений плечевого и локтевого суставов, поясняющих сущность изобретения; фиг. 3 - структурная блок-схема составных частей системы; фиг. 4 - блок-схема замкнутой системы разработанного для данной системы регулятора 6; фиг. 5 - графики требуемых (desired) и действительных (actual) траекторий движения одного из сочленений
Кинематическая схема тренажера (фиг. 1) состоит из пяти подвижных сочленений, которые обозначены на схеме θ1, θ2, θ3, θ4, θ5. Они являются углами соответствующих подвижных сочленений; a1 - это расстояние вдоль оси Xi от i-го звена до пересечения осей Xi и Zi-1, м; di - это расстояние вдоль оси Zi-1 от i-1-го звена до пересечения Xi и Zi-1, м; α - это угол между Xi и Xi-1.
Первое и второе сочленения тренажера предназначены для разработки плечевого сустава: сочленение 1 (θ1), отвечающее за горизонтальное сгибание/разгибание, обозначено цифрой 1 на фиг. 2; сочленение 2 (θ2), соответствующее вращению плеча внутрь и наружу, обозначено цифрой 2 на фиг. 2; сочленение 3 (θ3), соответствующее разведению/приведению плечевого сустава, обозначено цифрой 3 на фиг. 2; сочленение 4 (θ4), соответствующее сгибанию/разгибанию локтевого сустава, обозначено цифрой 4, а сочленение 5 (θ5) отвечает за сгибание/разгибание лучезапястного сустава.
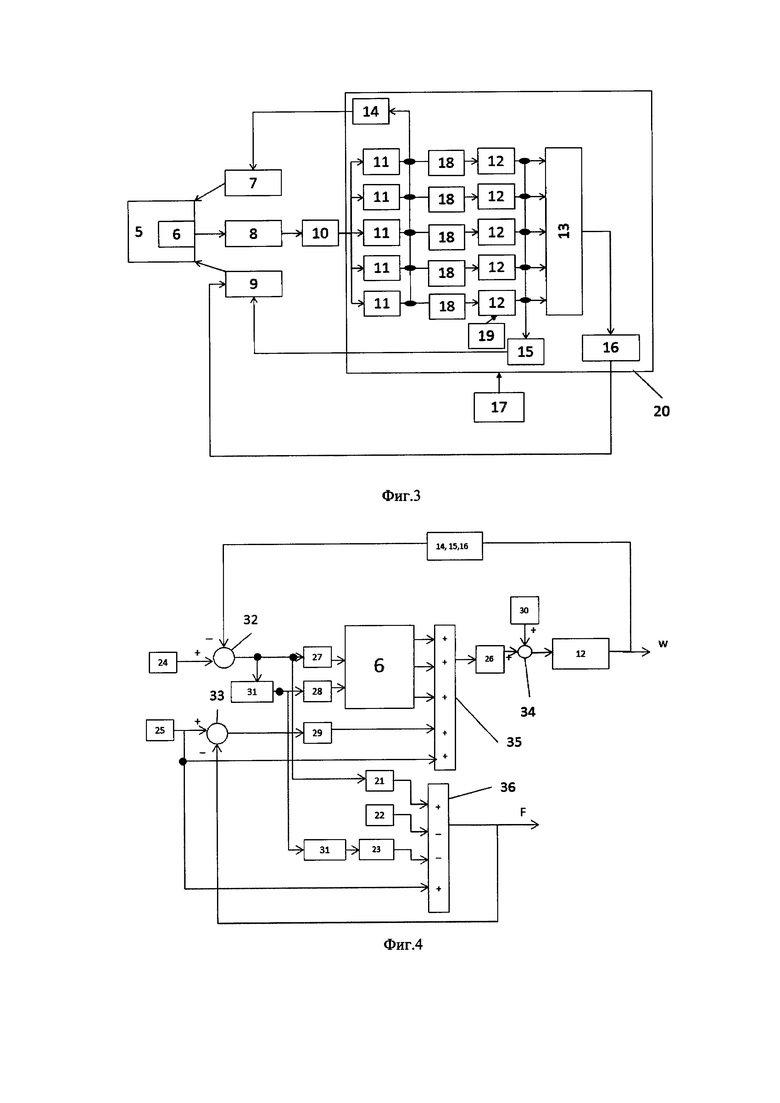
Основные элементы роботизированного тренажера представлены на структурной блок-схеме системы (фиг. 3). Функциональная схема состоит из персонального компьютера 5, нечеткого регулятора 6, микропроцессоров 7-9, силовых транзисторных ключей 10, мотор-редукторов 11, сочленений тренажера-манипулятора 12, суставов руки человека 13, системы энкодеров (датчиков положения) 14, системы тензометрических датчиков 15, системы датчиков мышечной активности 16, подъемника 17, фланцевых муфт 18, ложементов 19. Система, состоящая из мотор-редукторов 11, фланцевых муфт 18, сочленений 12, системы энкодеров 14, системы тензометрических датчиков 15 и датчиков мышечной активности 16, представляет собой сам манипулятор-тренажер 20.
Тренажер устроен по принципу экзоскелета. В начале работы устройство устанавливается подъемным механизмом 17, на котором закреплен манипулятор 20, приводящий в движение руку пациента, на определенной высоте под конкретного пациента. Рука пациента фиксируется ремнями на ложементах 19 на манипуляторе 20. Тренажер включается. Ортопед сообщает пациенту, какой комплекс упражнений необходимо совершить ему в зависимости от типа травмы. Когда пациент напрягает мышцу, чтобы привести в движение какой-либо сустав, датчики мышечной активности 16 обрабатывают этот сигнал и посылают его на микропроцессорное устройство 9. Этот сигнал обрабатывается микропроцессором 9 и по последовательному интерфейсу отправляется на персональный компьютер 5. Компьютер 5, получив информацию о мышечной активности с датчиков мышечной активности 16 определенных суставов, отправляет сигналы через нечеткий регулятор 6 на силовые транзисторные ключи 10 посредством микропроцессорного устройства 8, которые управляют моторами-редукторами 11, а они в свою очередь сочленениями 12, соответствующими этим суставам 13 посредством фланцевых муфт 18. Начинается движение. Тензометрические датчики 14 получают данные об изменениях усилия в сочленениях 12 манипулятора 20 со стороны суставов 13. Датчики измерения положения 14 также измеряют изменение положения звеньев манипулятора 20. Информация с этих датчиков поступает на микропроцессоры 7 и 9, которая вносит сигнал корректировки в нечеткий регулятор 6 для более устойчивого и плавного управления дальнейшим движением.
Отличительными свойствами предложенного устройства являются возможность разрабатывать весь комплекс суставов руки, включая лучезапястный; наличие датчиков мышечной активности 16; наличие нечеткого регулятора 6, который позволяет более плавно и безопасно управлять движениями суставов; присутствуют датчики положения 14, которые позволяют считывать угловое изменение положения манипулятора и тем самым осуществлять обратную связь по положению; наличие подъемного механизма 17, позволяющего регулировать высоту тренажера под конкретного пациента.
Разработанный нечеткий регулятор 6 является одной из существенных составных частей изобретения.
Нечеткий регулятор 6 предназначен для отслеживания траектории движения и приложения требуемой динамической нагрузки. Требуемая сила определяется как:

где F∈Rp - вектор обобщенных приложенных сил;
Р - размерность пространства задач;
Kd, Bd, Md, Xd - желаемые жесткость 21, коэффициент демпфирования 22, матрица инерции 23 и координаты требуемой траектории 24 соответственно;
Fd - вектор приложенных сил 25;
X,  ,
,  - вектор координат, скорости и ускорения соответственно.
- вектор координат, скорости и ускорения соответственно.
Закон управления приложенных сил динамической модели робота имеет вид:

где U - закон управления;
J(q) - якобиан системы 26;
Kp, Kv,  - матрицы коэффициентов усиления по позиции 27, скорости 28 и ускорения 29 соответственно;
- матрицы коэффициентов усиления по позиции 27, скорости 28 и ускорения 29 соответственно;
G - вектор гравитационных сил 30.
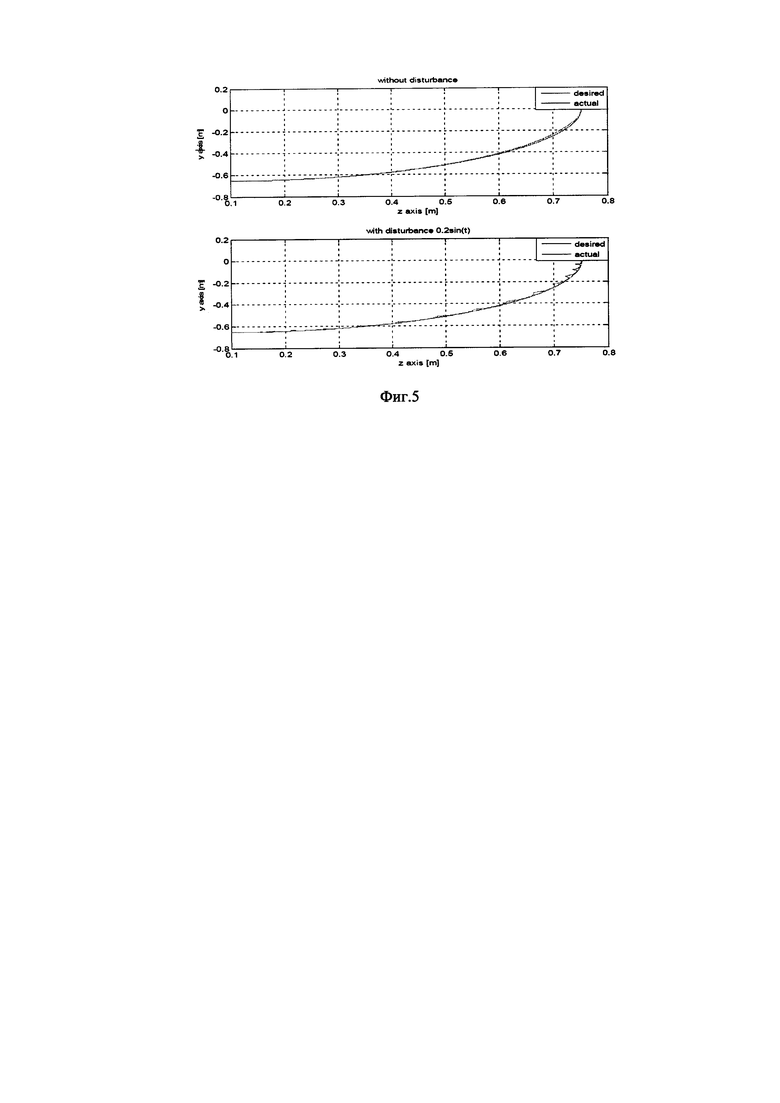
На фиг. 4 изображена блок-схема замкнутой системы разработанного для данной системы регулятора 6.
Приняты следующие обозначения:
31 - дифференциатор,
32-36 - сумматоры,
12 - объект управления (сочленения робота),
w - углы поворота мотор-редукторов 11,
F - вектор обобщенных приложенных сил.
Позиционный регулятор в данной системе имеет вид нечеткого PD-регулятора 6:

где (Xd-X) - входное воздействие в виде сигналов с датчиков положения 14, тензометрии 15 и датчиков мышечной активности 16;
 - сигнал ошибки.
- сигнал ошибки.
В таблице приведены параметры, указаны числовые параметры разработанного регулятора 6.
Коэффициенты нечеткого регулятора 6
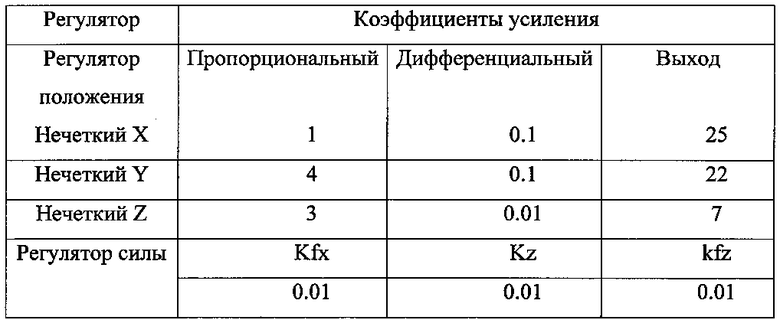
Эти коэффициенты были получены путем настройки регулятора 6 таким образом, чтобы каждый из сочленений 12 наиболее точно и с меньшей затратой времени достигали свою позицию.
На фиг. 5 изображены графики требуемых (desired) и действительных (actual) траекторий движения одного из сочленений 12, разрабатывающих лучезапястный сустав тренажера, без учета влияний дополнительных внешних возмущений и с учетом периодического внешнего возмущения. Учет внешнего возмущения необходим при использовании тренажера с пациентами, страдающими сильным тремором, например, с болезнью Паркинсона. На графиках изображено отклонение действительного значения траектории движения робота от требуемого. Действительная траектория движения манипулятора от требуемой отличается незначительно, что показывает высокую точность работы разработанного нечеткого регулятора 6.
Пример конкретного осуществления изобретения
Пациент получил травму связок лучезапястного и локтевого суставов в результате спортивных упражнений.
Краткая последовательность действий в этом случае: Устанавливается высота манипулятора 20 на требуемую для пациента высоту. Рука пациента закрепляется ремнями в ложементах 19 тренажера. Ортопед сообщает, какие движения необходимо сделать пациенту для группы лучезапястного и локтевого суставов. При движении этих суставов углы флексии/экстензии лучезапястного сустава не превышают 70°, угол флексии/экстензии локтевого сустава не превышает 95°. После нескольких упражнений мышечная активность пациента восстанавливается должным образом и датчики мышечной активности 16 фиксируют это и меняют программу нагрузки для пациента. Через некоторое время происходит частичное или полное восстановление связок (в зависимости от серьезности травмы) лучезапястного и локтевого суставов.
Таким образом, предлагаемое изобретение позволяет восстанавливать нормальную работу верхних конечностей полностью (лучезапястный, плечевой и локтевой суставы) наиболее эффективно за счет использования датчиков мышечной активности 16 и положения 14, которые не использовались ранее в подобных системах, и новому разработанному нечеткому регулятору 6 положения сочленений 12 манипулятора 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| ТРЕНАЖЕРНОЕ УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТЕХНИКИ И ПОВЫШЕНИЯ ЧАСТОТЫ ДВИЖЕНИЯ РУК ПРИ БЕГЕ | 2015 |
|
RU2592765C1 |
| Устройство для разработки движения и суставов верхней конечности | 2021 |
|
RU2766788C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ СВЯЗОЧНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ МЕДИЦИНСКИХ ЭЛАСТИЧНЫХ БИНТОВ | 2022 |
|
RU2802526C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ПОСЛЕ ИНСУЛЬТА ИЛИ ТРАВМЫ С ИСПОЛЬЗОВАНИЕМ РОБОТИЗИРОВАННОГО КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО ЭКЗОСКЕЛЕТ КОНЕЧНОСТИ ЧЕЛОВЕКА, УПРАВЛЯЕМЫЙ ЧЕРЕЗ ИНТЕРФЕЙС МОЗГ-КОМПЬЮТЕР ПОСРЕДСТВОМ ВООБРАЖЕНИЯ ДВИЖЕНИЙ | 2015 |
|
RU2622206C2 |
| Тренажер для реабилитации верхних конечностей и туловища РУЛЕВОЙ и способ его применения | 2023 |
|
RU2798356C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
Изобретение относится к реабилитационной медицине и может быть использовано для реабилитации людей после травм опорно-двигательного аппарата. Роботизированный тренажер включает персональный компьютер, микропроцессорные устройства, силовые транзисторные ключи и ортопедические модули, состоящие из пяти жестких сочленений. Ортопедические модули могут изменять свое положение друг относительно друга и выполнены с возможностью одновременно сгибать/разгибать плечевой сустав, вращать плечевой сустав внутрь и наружу, разводить/приводить плечевой сустав, сгибать/разгибать локтевой сустав, сгибать/разгибать лучезапястный сустав. Ортопедические модули соединены посредством фланцевых муфт с соответствующими мотор-редукторами. На ортопедических модулях располагаются ложементы с лямками для крепления суставов. Выходы с тензометрических датчиков усилий соединены с входами микропроцессорных устройств, имеющих информационную связь с персональным компьютером. Мотор-редукторы соединены с силовыми транзисторными ключами, которые в свою очередь соединены с микропроцессорным устройством. Роботизированный тренажер позволяет разработать весь комплекс суставов руки, включая лучезапястный, позволяет плавно и безопасно управлять движениями суставов, регулирует высоту тренажера под конкретного пациента. 5 ил., 1 табл.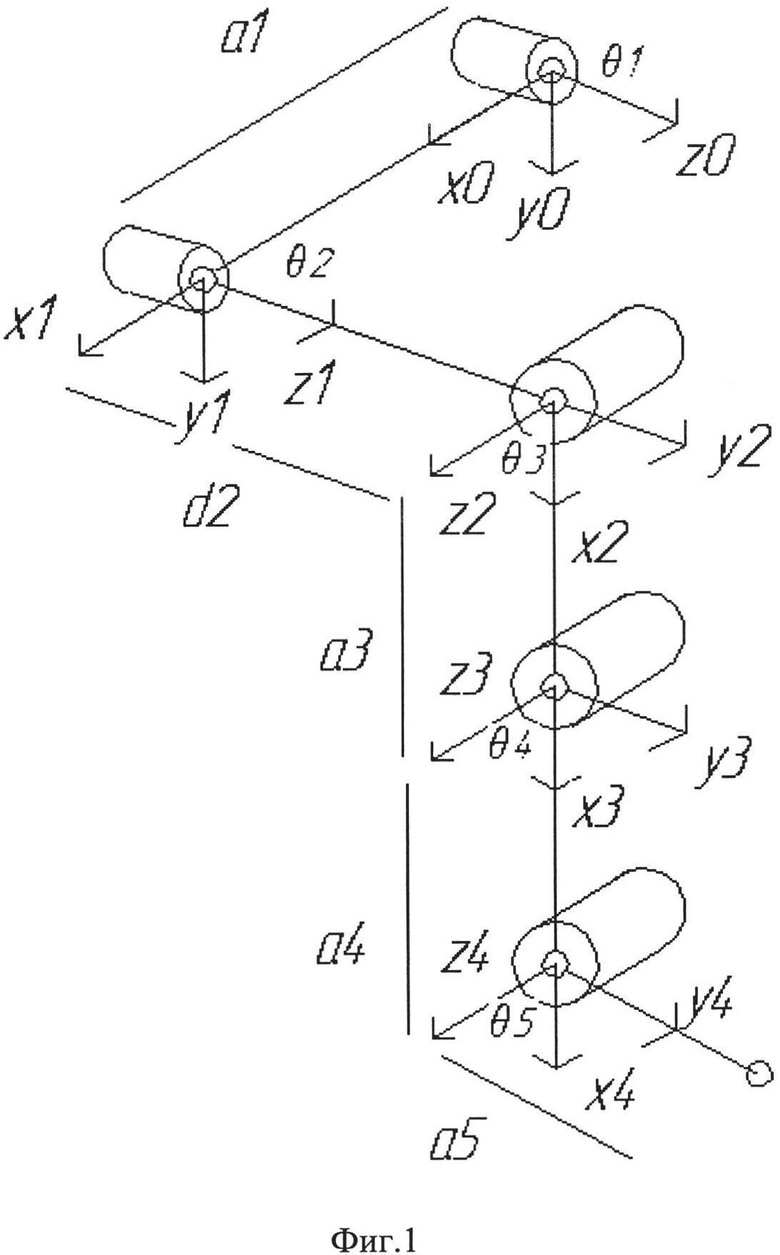
Роботизированный тренажер для людей с нарушениями функций опорно-двигательного аппарата, содержащий устройство управления, включающее в себя персональный компьютер, микропроцессорные устройства, силовые транзисторные ключи и ортопедические модули, состоящие из пяти жестких сочленений, которые могут изменять свое положение друг относительно друга и при этом выполнены с возможностью при использовании одновременно сгибать/разгибать плечевой сустав, вращать плечевой сустав внутрь и наружу, разводить/приводить плечевой сустав, сгибать/разгибать локтевой сустав, сгибать/разгибать лучезапястный сустав, соединенных посредством фланцевых муфт с соответствующими мотор-редукторами, на ортопедических модулях располагаются ложементы с лямками для крепления суставов, при этом выходы с тензометрических датчиков усилий соединены со входами микропроцессорных устройств, имеющих информационную связь с персональным компьютером, а мотор-редукторы соединены с силовыми транзисторными ключами, которые в свою очередь соединены с микропроцессорным устройством.
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| Способ выделения сычужного фермента | 1935 |
|
SU45793A1 |
| Устройство для биотермической переработки органических отбросов | 1939 |
|
SU59973A1 |
| US20060195018 A1 25.02.2005 | |||
| Устройство для откачки электровакуумных приборов | 1931 |
|
SU37615A1 |

