Изобретение относится к медицине и может быть использовано для реабилитации больных с патологией центральной нервной системы и двигательными нарушениями верхних конечностей, а также к тренировочным устройствам для пальцев рук.
Известна шина для разработки пальцев Hand CPM H440 см. Каталог фирмы JACE стр.80, 2001 г. Данное устройство для развития пальцев рук содержит пружинный механизм и фиксаторы верхних фаланг пальцев. Пружинный механизм связан с двигателем и системой его управления. Кроме того, устройство крепится с помощью манжеты к руке пациента. Недостатками данного устройства является сложность его конструкции, а также пассивное участие пациента в процессе реабилитации.
Известно также "Устройство для разработки движений в суставах верхней конечности" (патент РФ №2157166, кл. А 61 Н 1/00, опубликованный в БИ №28 от 10.10.2000 г.). Устройство включает пружинный механизм, расположенный в корпусе. Пружинный механизм включает обычную цилиндрическую пружину, связанную с подвижной рукояткой. Пациент выполняет сгибания пальцев в межфаланговых суставах. При этом подвижная рукоятка перемещается к опорной рукоятке, а тяга движется в осевом направлении в опорах, сжимая пружину. Предплечье и кисть пациента фиксируются ремнями, а пальцы располагаются на подвижной и опорной рукоятках. Недостатками данного устройства является то, что оно предназначено только для активно-пассивной тренировки межфаланговых суставов, то есть для сгиба-разгиба пальцев в суставах. Данное устройство выбрано в качестве прототипа.
При создании данного изобретения решалась задача создания устройства для развития мелкой моторики пальцев рук с биологической обратной связью БОС.
Техническим результатом при решении данной задачи является расширение функциональных возможностей заявляемого устройства, что ведет к сокращению сроков реабилитации пациентов с двигательными нарушениями пальцев рук, связанных с поражением центральной нервной системы.
Указанный технический результат достигается тем, что по сравнению с известным устройством, включающим пружинный механизм, расположенный в корпусе, в заявляемом устройстве для развития моторики пальцев рук пружинный механизм выполнен из набора пластинчатых пружин, расположенных в пазах. Пазы выполнены в корпусе с возможностью замены пружин и перемещения их по пазам. Пластинчатые пружины имеют выступающие из корпуса части. Свободные концы выступающих частей пластинчатых пружин соединены с элементами управления куклой-марионеткой. В набор входят пластинчатые пружины с различным коэффициентом упругости. На свободных концах выступающих частей пластинчатых пружин могут быть расположены фиксаторы пальцев рук пациента.
Восстановление движений при парезах, возникающих в результате поражения центральной нервной системы, несмотря на значительные достижения в области нейрореабилитации, по-прежнему остается актуальной проблемой, требующей решения на новом уровне. Применение биологической обратной связи БОС является успешным как при различных заболеваниях - детский церебральный паралич, эпилепсия паркинсонизм, сосудистые заболевания головного мозга, травмы спинного и головного мозга, заболевания периферической нервной системы, неврозы, торсионная дистония и др., так и при разнообразных клинических синдромах - клонические и тонические гиперкинезы, парезы, головная боль, болевые синдромы и др.
Под БОС понимается комплекс процедур, в ходе которых пациенту посредством контура внешней обратной связи подается информация о состоянии тех или иных физиологических процессов с целью обучения "сознательному" управлению этими функциями. Биоуправление с обратной связью позволяет пациенту добиваться контроля над параметрами этих процессов, вызывать и закреплять их сдвиги в требуемом направлении (см. Сохадзе Э.М., Штарк М.Б. "Биологическая (биотехническая) обратная связь biofeedback - мониторинг и произвольный контроль параметров физических параметров физиологических систем с мини-ЭВМ". Препринт №239, Новосибирск, 1984, 44 стр.).
Чем разнообразнее и координированнее становятся движения восстанавливаемой конечности, тем больше движений совершает кукла-марионетка. Управляемыми параметрами являются биомеханические характеристики (суставной угол, активность тремора и усилие).
Выполнение пружинного механизма в виде набора упругих пластинчатых пружин под каждый палец позволяет создавать в пальцах необходимое сопротивление движению пальцев. Пластинчатые пружины устанавливаются с возможностью перемещения их по пазам для изменения длины выступающей из корпуса части с целью создания нагрузки под разные фаланги пальцев. При этом ладонь пациента расположена на корпусе, а пальцы на выступающих частях пружин. Пазы выполнены также для фиксации пластинчатых пружин от боковых перемещений. Для изменения сопротивления движению пальцев пластины можно менять, регулируя их упругость. В набор пластин можно включить пластины из материалов с различным коэффициентом упругости и различной толщины. Иногда в зависимости от курса реабилитации и состояния пациента требуется фиксация пальцев. В этом случае на свободных концах выступающих частей пластинчатых пружин можно дополнительно установить фиксаторы под кончики пальцев, выполненные, например, в виде наперстка, петли, "липучки" и т.п. К каждой пластинчатой пружине подсоединяется один из элементов управления куклой-марионеткой (нить, стержень, леска, пружина и т.п. или их сочетание). Движения пальцев передаются через элементы управления кукле марионетке. Пациент наблюдает за разнообразием движений куклы марионетки, которые связаны с движением пальцев рук. Чем тоньше и разнообразнее движения пальцев рук, тем разнообразнее движения куклы. Это стимулирует пациента совершать разнообразные и с разным усилием движения пальцев рук. Таким образом, осуществляется биологическая обратная связь БОС. Основными показателями состояния категории пациентов, для которых предназначено заявляемое устройство, является тремор рук и суставной угол фаланг пальцев. Известно, что до 30% своей энергии затрачивается мозгом на управление движением пальцев рук. Чем больше удается развить мелкую моторику пальцев рук, тем лучше восстанавливаются нарушенные связи головного мозга, а это имеет важное значение в процессе реабилитации. Заявляемое устройство с БОС позволяет расширить функциональные возможности по сравнению с обычными механическими тренажерами, а занимательность и заинтересованность пациента ведет к сокращению сроков реабилитации.
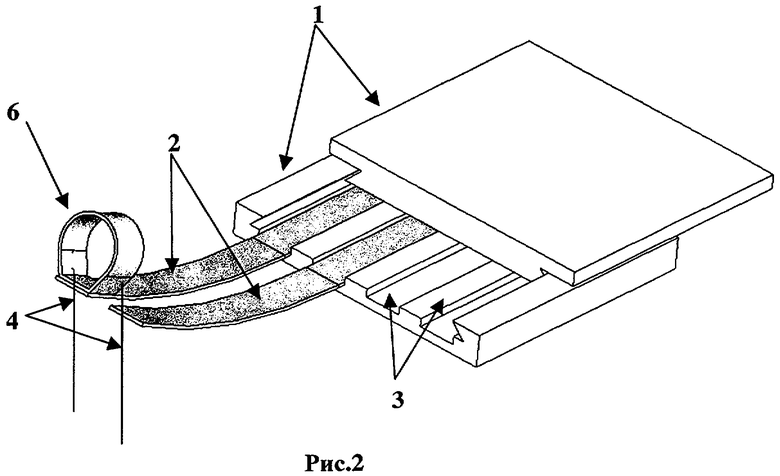
На Фиг.1 изображено заявляемое устройство для развития мелкой моторики пальцев рук.
На Фиг.2 изображено расположение пружинного механизма в корпусе.
Устройство для развития моторики пальцев рук включает пружинный механизм, расположенный в корпусе 1. Пружинный механизм выполнен из набора съемных пластинчатых пружин 2, расположенных в пазах 3, выполненных на внутренней поверхности стенки корпуса 1 с возможностью их замены и перемещения по пазам 3 и имеющих выступающие из корпуса части. Свободные концы выступающих частей пластинчатых пружин 2 соединены с элементами управления 4 куклой-марионеткой 5. Пружинный механизм выполнен из набора пластинчатых пружин 2 с различным коэффициентом упругости. На свободных концах выступающих частей пластинчатых пружин 2 расположены фиксаторы 6 верхних фаланг пальцев пациента.
В примере реализации заявляемого устройства в корпусе, выполненном из капролона, расположены пластинчатые пружины из бронзы БРБ-2 шириной 10 мм, длиной 150 мм и толщиной 1 мм. Пластинчатые пружины подбираются с различным коэффициентом упругости. Для этого в один паз можно уложить несколько пружин или с помощью термической закалки бронзы добиться увеличения упругости пружин. Корпус выполнен из основания и крышки. Соединение между ними выполнено в виде "ласточкиного хвоста", что позволяет смещать крышку относительно основания. В основании корпуса на внутренней поверхности стенки выполнены пазы под пластинчатые пружины. На свободных концах выступающих частей пластинчатых пружин расположены фиксаторы верхних фаланг пальцев в виде петли из ленты "липучки". Кукла-марионетка подбирается индивидуально с различными степенями управления движением. Элементы управления куклой в данном примере выполнены из нитей для конечностей.
Работает заявляемое устройство следующим образом. Ладонь пациента располагается на корпусе 1 устройства, а каждый палец - на выступающей части каждой пластины 2 пружинного механизма. Перемещая пластины по пазам 3, можно регулировать длину выступающих частей пластин. Верхние фаланги пальцев при необходимости могут быть закреплены с помощью фиксаторов 6. При надавливании на пластинчатые пружины движения передаются через элементы управления 4 кукле-марионетке 5. Чем разнообразнее и сильнее движения пальцев, тем разнообразнее движения совершает кукла-марионетка. За ее движениями пациент может наблюдать непосредственно или в зеркале, установленном напротив кресла. Данным образом осуществляется биологическая обратная связь.
Таким образом, по сравнению с прототипом заявляемое устройство с биологической обратной связью позволяет значительно расширить его функциональные возможности. С помощью заявляемого устройства можно осуществлять развитие мелкой моторики пальцев, совершать активно-пассивные сгибательные и разгибательные движения разных фаланг пальцев с дозированной нагрузкой и с возможностью визуального контроля характерными движениями в процессе реабилитации. Устройство позволяет вести как индивидуальные, так и групповые занятия, представляющие собой игровой тренинг. При этом сроки реабилитации пациентов сокращаются на 20-30%.
Изобретение относится к медицине и может быть использовано для реабилитации больных с патологией центральной нервной системы и двигательными нарушениями верхних конечностей, а также к тренировочным устройствам для пальцев рук. Устройство для развития моторики пальцев рук включает пружинный механизм, расположенный в корпусе. Пружинный механизм состоит из набора пластинчатых пружин, выполненных с возможностью их замены и перемещения по пазам, выполненным в корпусе. Пластинчатые пружины имеют выступающие из корпуса части. Свободные концы пластинчатых пружин соединены с элементами управления куклой-марионеткой. Технический результат - расширение функциональных возможностей, что ведет к сокращению сроков реабилитации пациентов с двигательными нарушениями пальцев рук, связанных с поражением центральной нервной системы. 2 з.п. ф-лы, 2 ил.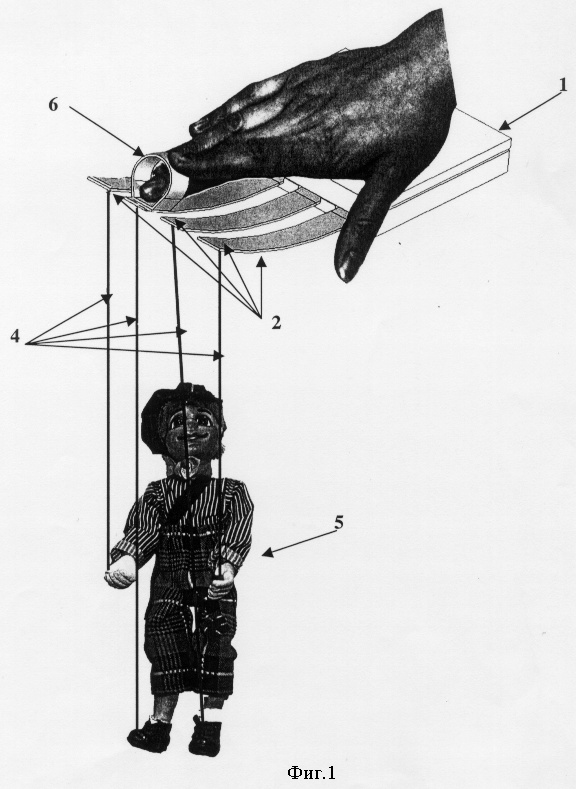
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ДВИЖЕНИЙ В СУСТАВАХ ВЕРХНЕЙ КОНЕЧНОСТИ | 1999 |
|
RU2157166C1 |
| Устройство для разработки суставов пальцев кисти | 1988 |
|
SU1637800A1 |
| Механотерапевтическое приспособление для приведения и отведения пальцев кисти руки | 1943 |
|
SU66735A1 |
| US 6450924 В1, 17.09.2002 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАБИВКИ ПАПИРОС В ПАПИРОСОНАБИВНЫХ МАШИНАХ | 1930 |
|
SU20522A1 |

