Изобретение относится к области машиностроения, а именно к конструкциям преобразуемых летательных аппаратов вертикального взлета-посадки, в частности к конвертопланам.
Их особенностью является способность преобразовываться из одного летательного аппарата, в другой, а именно из вертолета в самолет и обратно. Полезная модель касается преобразуемых летательных аппаратов с подъемно-маршевыми винтами.
Известно большое количество винтовых конвертопланов с различным расположением как подъемно-маршевых винтов (когда в вертикальном и горизонтальном полете используются одни и те же винты), так и раздельно-комбинированных винтовых систем (когда в вертикальном и горизонтальном полете используются разные винты).
Общим недостатком известных конструкций является наличие резко отличающихся друг от друга режимов полета, поэтому процесс перехода от одного к другому связан с риском потери устойчивости аппарата и срыву в штопор.
Известен конвертоплан, содержащий два параллельно расположенных фюзеляжа с общим крылом, имеющим консоли и центральную балку, а также два двигателя, кинематически связанных с двумя воздушными винтами. При этом балка установлена с возможностью поворота на 90°, и, таким образом, воздушные винты поочередно работают как маршевые и как подъемные (аналог - патент РФ №2028964, кл. В 64 С 27/22). Недостатком известного конвертоплана является большой вес из-за значительной мощности двигателей, связанных с винтами малого диаметра, расположенными между фюзеляжами, что обуславливается размещением их на балке.
Известен конвертоплан, содержащий фюзеляж, крылья, по крайней мере два винта, установленные с возможностью изменения положения от вертикального к горизонтальному посредством привода и соединенные соответствующей трансмиссией с соответствующим двигателем, неподвижно установленным в мотогондоле (прототип - патент США № 6276633, В 64 D 27/00).
Недостатком известного решения является усложнение и утяжеление системы управления подъемно-маршевыми винтами (в дальнейшем сокращенно - ПМ винтами) на вертикальных режимах полета за счет применения моноциклической схемы управления, которая наибольшее время полета в горизонтальном режиме совсем не задействована и лишь является "мертвым" грузом. А также снижение ресурса винта за счет дополнительного увеличения уровня его вибрации из-за искусственной аэродинамической ассиметрии при циклическом изменении угла атаки лопастей. Что необходимо на вертикальных и переходных режимах для получения управляющих сил путем смещения вектора тяги ПМ винтов относительно сметаемого диска.
Задача, решаемая полезной моделью, - повысить возможность активного управления на всех режимах полета при использовании более простой по конструкции системы управления, обусловленной максимально выгодным исполнением конвертоплана по схеме «утка», что одновременно повышает и безопасность эксплуатации данного летательного аппарата.
Для решения поставленной задачи в конвертоплане, содержащем фюзеляж, крылья с мотогондолами, по крайней мере, два винта, установленные с возможностью изменения положения от вертикального к горизонтальному посредством привода и соединенные соответствующей трансмиссией с соответствующим двигателем, неподвижно установленным в мотогондоле, в соответствии с изобретением мотогондолы удлинены и размещены в средней части крыльев, причем на передней подвижной части каждой мотогондолы за винтом размещено переднее горизонтальное оперение, а на неподвижной задней части установлено заднее вертикальное хвостовое оперение.
Хвостовое оперение выполнено с наклоном вовнутрь относительно вертикальной продольной плоскости неподвижной части мотогондолы.
Переднее горизонтальное оперение мотогондолы обращено в сторону, противоположную фюзеляжу, и расположено на продолжении прямой, соединяющей воображаемую продольную ось с воображаемой точкой окружности сечения корпуса подвижной части мотогондолы.
Технический результат от использования изобретения заключается в том, что за счет выполнения конвертоплана по схеме «утка», мотогондолы выполняются удлиненными, винты при этом выносятся вперед фюзеляжа, что позволяет, при необходимости, иметь больший диаметр винтов, а размещение на передней поворотной части каждой мотогондолы за винтом - переднего горизонтального оперения (ПГО), приводит к управляемому поведению конвертоплана при вертикальных и переходных режимах полета. При этом ПГО на всех режимах полета находится в зоне индуктивного воздушного потока от винта и соответственно на всех режимах полета используется одна и та же, более простая, система управления конвертопланом посредством управления ПГО.
Разнесение мотогондол с винтами в стороны от фюзеляжа, в район средней части крыльев, позволяет стабилизировать режимы горизонтального полета на критических углах атаки конвертоплана за счет дополнительного обдува крыльев потоком (покрывающим все крыло) от винтов, что отодвигает срыв с крыльев на большие углы атаки аппарата или вовсе его исключает, вплоть до зависания аппарата в вертикальном положении.
Сравнение заявленного технического решения с уровнем техники по научно-технической и патентной документации на дату приоритета в основной и смежной рубриках показывает, что совокупность существенных признаков заявленного решения не была известна, следовательно, оно соответствует условию патентоспособности «новизна».
Анализ известных технических решений в данной области техники показал, что предложенное устройство имеет признаки, которые отсутствуют в известных технических решениях, а использование их в заявленной совокупности признаков дает возможность получить новый технический эффект, следовательно, предложенное техническое решение обладает изобретательским уровнем по сравнению с уровнем техники.
Предложенное техническое решение может быть изготовлено промышленным способом, работоспособно, осуществимо, воспроизводимо, следовательно, соответствует условию патентоспособности «промышленная применимость».
Фиг.1 - конвертоплан при режиме вертикального взлета как вертолет, вид сверху;
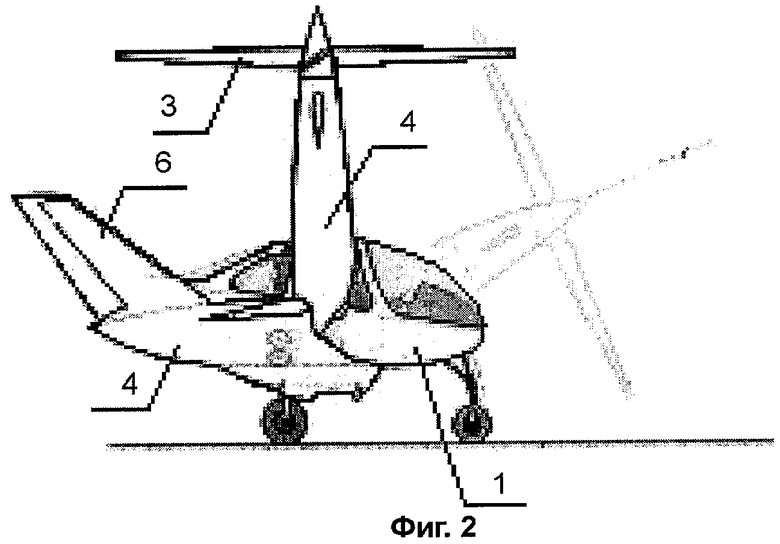
Фиг.2 - конвертоплан, то же, вид сбоку;
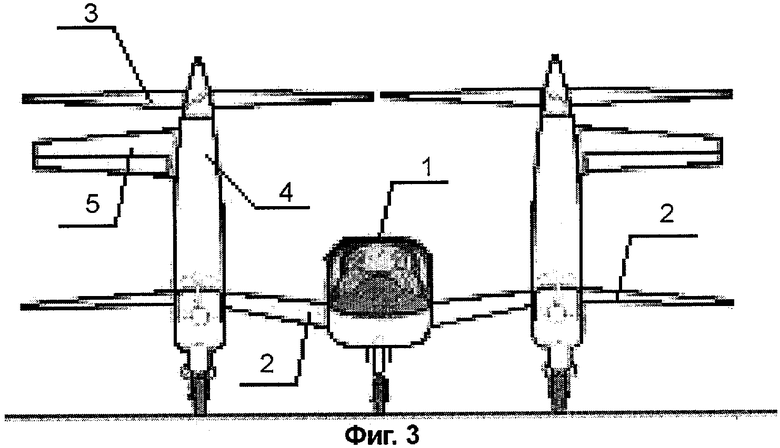
Фиг.3 - конвертоплан, то же, вид спереди;
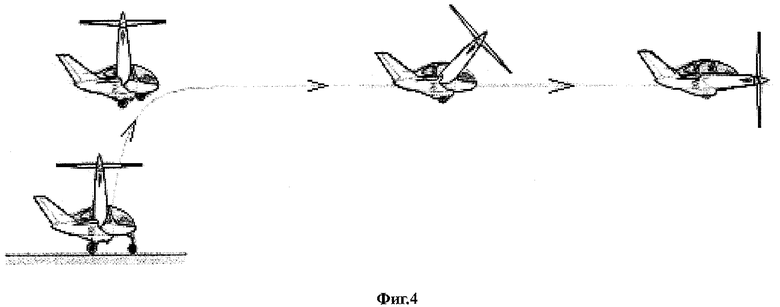
Фиг.4 - конвертоплан в режиме горизонтального взлета как самолет, вид сбоку;
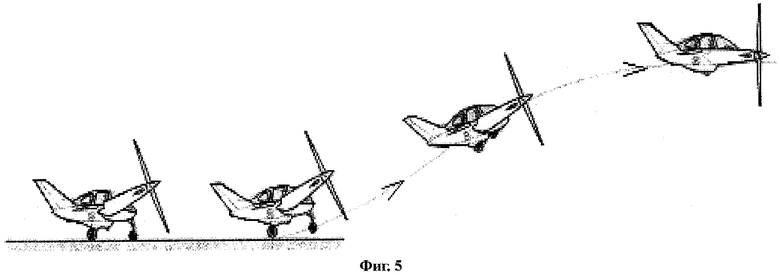
Фиг.5 - последовательная схема вертикального взлета конвертоплана в режиме как вертолет, вид сбоку.
Конвертоплан содержит фюзеляж 1 (см. Фиг.1) с кабиной (для пилота, для пассажира, для груза), крылья 2, два винта 3. Винты имеют возможность изменять положение от вертикального к горизонтальному посредством сервопривода, соединенного через синхронный вал с поворотными редукторами мотогондол 4. Двигатели конвертоплана установлены в неподвижных частях удлиненных мотогондол 4. Мотогондолы 4 установлены в средней части каждого крыла 2. На подвижной части каждой из мотогондол 4 размещены винты 3, за которыми расположено ПГО (переднее горизонтальное оперение) 5. На неподвижной части каждой из мотогондол 4 выполнено хвостовое вертикальное оперение 6. Хвостовое оперение 6 выполнено с наклоном внутрь относительно вертикальной продольной плоскости неподвижной части мотогондолы 4. ПГО 5 мотогондол 4 обращено в сторону, противоположную фюзеляжу, расположено на продолжении прямой, соединяющей воображаемую продольную ось с воображаемой точкой окружности сечения корпуса подвижной части мотогондолы 4.
Взлет, полет и посадку конвертоплан осуществляет следующим образом.
- Запускаются двигатели.
- Для осуществления вертикального взлета (см. Фиг.5) осуществляют поворот подъемно-маршевых винтов 3 (ПМ винтов) до 90° относительно горизонтальной плоскости, причем центр масс незначительно смещается назад от оси вращения винтов (что требуется центровкой для управляемости аппарата в вертикальном режиме), а близость рулевых плоскостей переднего горизонтального оперения 5 к указанным винтам приводит к тому, что летательный аппарат максимально чувствителен к углу поворота рулевых плоскостей. При этом запас управления рулями ПГО 5 достаточен для перевода летательного аппарата после вертикального взлета в горизонтальный полет. На вертикальном режиме управление по тангажу осуществляется посредством ПГО 5, управление по крену - посредством дифференциального изменения общего шага ПМ винтов 3, управление по курсу - посредством тех же ПГО (дифференциальным отклонением его рулевых плоскостей). Вертикальное хвостовое оперение 6 для управления по курсу в вертикальном режиме не эффективно.
- Переход от вертикального режима в горизонтальный режим полета происходит во время поворота ПМ винтов 3 до соосного их положения с фюзеляжем 1. Во время поворота ПМ винтов 3 происходит смещение общего центра тяжести конвертоплана вперед (за счет смещения вперед центров тяжести поворотных частей мотогондол 4 во время их поворота вперед и вниз), что как раз требуется условием центровки для горизонтального полета. В переходном режиме управление по тангажу и частично по курсу осуществляется тем же ПГО 5, так как оно и на переходном режиме эффективно обдувается потоком от винтов, а управление по крену за счет дифференциального изменения общего шага ПМ винтов и частично за счет элеронов на основных несущих плоскостях крыльев 2. Вертикальное оперение 6 также набирает эффективности в управлении по курсу по мере окончания переходного режима. Возможна любая траектория полета на переходном режиме как горизонтальная, так и с одновременным набором высоты.
- Достигнув необходимой высоты, конвертоплан переходит в горизонтальный полет, где управление по тангажу осуществляется теми же ПГО 5, управление по крену за счет элеронов на основных несущих плоскостях крыльев 2, а управление по курсу посредством вертикального оперения 6.
Применение на хвостовом вертикальном оперении 6 внутреннего наклона (к продольной оси аппарата) делает летательный аппарат устойчивым в горизонтальном полете при управлении по курсу, т.к. появляется дополнительная пара сил, способствующая "правильному" вхождению аппарата в вираж при его повороте.
Расположение легко нагруженных (при нагрузке на ометаемую площадь до 100 кг/м2) ПМ винтов 3 в средней части крыла способствует тому, что воздушный поток от винтов гарантированно обдувает рулевые плоскости на концах крыльев (элероны), что способствует активному управлению полетом.
- В случае осуществления взлета и посадки по самолетному, ПМ винты 3 конвертоплана устанавливаются не в крайнее положение, а на некоторый угол (см. Фиг.2в, и Фиг.1 вид А), позволяющий совершить ультракороткий взлет (взлет с разбегом на дистанции 20-60 м).
- Для вертикальной посадки конвертоплана предусматриваются следующие операции:
снижается скорость горизонтального полета и производится поворот ПМ винтов 3 в вертикальное положение с соблюдением высоты полета или с плавным снижением траектории. Подъемно-маршевые винты 3 обеспечивают большую (k=1,25) подъемную тягу для зависания конвертоплана над местом посадки. За счет снижения шага лопастей (при постоянных оборотах) ПМ винтов 3 обеспечивается плавный спуск и посадка, при этом управление посадкой по тангажу и курсу производится за счет управления ПГО 5, находящихся под набегающим потоком воздуха от винтов. Таким образом ПГО 5 конвертоплана является активным на всех режимах его полета. Поэтому система такого управления на конвертоплане по схеме "утка" правильнее будет называться - АПГО (система управления с Активным ПГО).
В случае отказа системы поворота винтов в вертикальное положение или неполадок двигателей, посадку можно осуществить в самолетном режиме. А при невозможности использования самолетного режима посадки - можно осуществить ее при помощи спасательной парашютной системы для всего конвертоплана (расположенной в центральном фюзеляже). К примеру, такую парашютную систему на вертолете применить невозможно из-за вращающегося над ним несущего винта.
Расположение переднего горизонтального оперения непосредственно за винтом повышает эффективность управления рулевыми плоскостями на всех режимах полета.
Достоинством представленного решения является то, что конвертоплан выполнен по схеме «утка». Особенностью такой схемы является то, что горизонтальное оперение размещается в передней части, перед крылом (в отличии от классического самолета, где горизонтальное оперение расположено в хвосте самолета). В отличие от обычных схем оперение «утки» все время имеет положительную подъемную силу, что увеличивает общее аэродинамическое качество летательного аппарата. Таким образом несущими поверхностями у конвертоплана являются не только крылья, но и горизонтальное оперение.
Отсюда следует, что при прочих равных условиях, возможность активного управления полетом на всех режимах, у предлагаемого летательного аппарата будет значительно выше, чем у аналогов, а также данная схема управления проще, удобнее и дешевле в эксплуатации, надежнее и безопаснее. Все это благодаря удачному применению аэродинамической схемы «утка» как конвертоплана. До настоящего момента в конвертопланах схемы «утка» не рассматривался вариант поворота АПГО совместно с ПМ винтами, что дает возможность неизменного использования рулей АПГО на всех режимах полета конвертоплана как более простого и надежного варианта системы управления. До сих пор в проектах конвертопланов «уток» ПГО рассматривалось как неподвижный элемент фюзеляжа, использование которого происходило только в горизонтальном полете. А на вертикальных режимах применялись дополнительные агрегаты системы управления ПМ винтами - более сложные по конструкции модули моноциклического управления (т.е. автоматы перекоса по типу вертолетных), необходимость в которых во время горизонтального полета отсутствует.
Предлагаемый конвертоплан может быть изготовлен с применением известных технологий и материалов как в единичном производстве, так и малыми сериями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| КОНВЕРТОПЛАН | 2016 |
|
RU2635431C1 |
| Конвертоплан | 2018 |
|
RU2682756C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| Конвертоплан | 2017 |
|
RU2674622C1 |
| Трехвинтовой конвертоплан | 2017 |
|
RU2656957C1 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
Изобретение относится к авиации. Конвертоплан содержит фюзеляж 1 с кабиной, крылья 2, два винта 3. Винты имеют возможность изменять положение от вертикального к горизонтальному. Двигатели конвертоплана установлены в неподвижных частях удлиненных мотогондол 4. Мотогондолы 4 установлены в средней части каждого крыла 2. На подвижной части каждой из мотогондол 4 размещены винты 3, за которыми расположено переднее горизонтальное оперение 5. На неподвижной части каждой из мотогондол 4 выполнено хвостовое вертикальное оперение 6 с наклоном внутрь относительно вертикальной продольной плоскости неподвижной части мотогондолы 4. Техническим результатом изобретения является повышение устойчивости и надежности эксплуатации летательного аппарата. 2 з.п. ф-лы, 5 ил.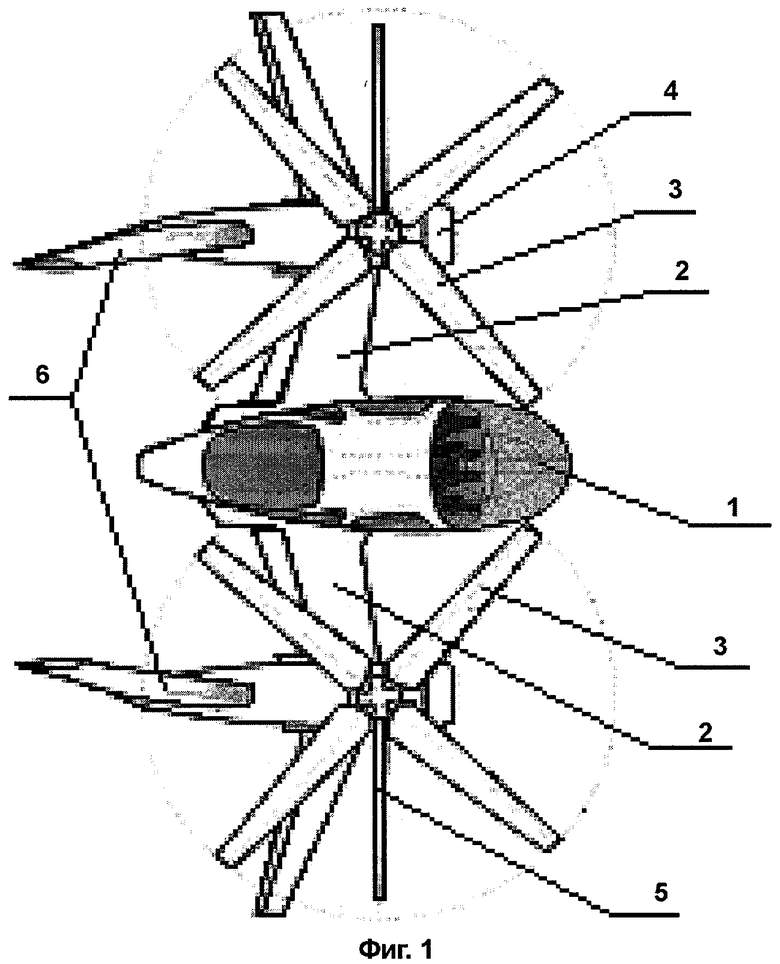
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1997 |
|
RU2132289C1 |
| US 6276633 B1, 21.08.2001 | |||
| RU 2058912 C1, 27.04.1996. | |||

