Область техники, к которой относится изобретение
Изобретение относится к области авиастроения, а именно к конвертопланам.
Уровень техники и предпосылки создания изобретения
На сегодняшний день широкое применение получили аппараты классических схем, самолёт, вертолет, многороторные аппараты разных вариаций, аэрогибриды, винтокрылы.
У каждой из схем есть недостатки и преимущества, но зачастую недостатки удорожают применение БПЛА в разных сферах промышленности, что не только затормаживает развитие беспилотной отрасли в целом, но и формирует предвзятое мнение о сложности эксплуатации беспилотных технологий.
Недостатки схем.
Самолёт: практическая невозможность зависания на месте, осуществления устойчивого вертикального взлета и посадки. Восприимчивость внешних факторов; турбулентность, скорость ветра. Изменение эффективности управления по скорости набегающего потока. Сложность, а главное дороговизна полной автоматизации обслуживания для создания автономного решения. Необходимость взлетно-посадочной площадки для построения глиссад.
Вертолёт: дороговизна применимости ввиду необходимости производства и обслуживания механики управления, автомата перекоса, трансмиссии, редукторов. Высокая конечная стоимость готового изделия. Малый радиус полёта. низкая энергоэффективность в перерасчете Вт⋅ч/кг/км пути.
Многороторные аппараты: малая надежность САУ. Невозможность масштабирования ввиду практической невозможности управления рывком и ускорением, угловой скорости ротора для обеспечения необходимого упреждающего воздействия. Низкая ветроустойчивость. Низкая энергоэффективность в перерасчете Вт⋅ч/кг/км пути. Высокие требования к удельной энергоемкости источника питания Вт⋅ч/кг, для обеспечения достаточной продолжительности полёта и необходимой весовой доли на целевую нагрузку.
Аэрогибрид: под этот термин попадают разные вариации, а также попытки совмещения мультироторных аппаратов, вертолетов с самолетами, схема имеет следующие недостатки: снижение доли полезной нагрузки. Снижение диапазона допустимых ветровых нагрузок. Ухудшение энергоэффективности в перерасчете на коэффициент Вт⋅ч/кг/км. Малая устойчивость в вертолетном режиме.
Винтокрыл: Разновидность летательных аппаратов, в которых подъемная сила создается аэродинамическими консолями, а также вертикальной проекцией ометаемой площади роторов. К недостаткам схемы следует отнести: усложнение конструкции летательного аппарата, возникновение интерферентной картины обтекания аэродинамических поверхностей индуктивным вихрем, отбрасываемым несущими винтами. Увеличение весовой доли конструкции, возникновение аэродинамических моментов ввиду сложной модели обтекания работы несущих винтов в косом потоке и пр. Снижение удельной энергоэффективности схемы относительно самолетной схемы Вт⋅ч/кг/км.
Перечисленные недостатки приводят к необходимости частого обслуживания БПЛА, навязывают формирование кадрового состава, обучение применению, поиска наиболее выгодных для эксплуатации мест, а зачастую таких не бывает и командам приходится долго искать место для совершения взлета и посадки или рисковать дорогостоящим аппаратом, всё это приводит к повышению риска порчи БПЛА, а также повышению стоимости применения беспилотных технологий.
Промышленности необходим летательный аппарат нового типа, не имеющий вышеперечисленных недостатков. Логичным вариантом решения является использование БПЛА типа конвертоплан. Разработка конвертоплана трудоемкий процесс, и имеет высокий порог входа, обусловленный наукоемкостью задачи.
У всех на сегодняшний день известных разработанных конвертопланов есть следующие проблемы: сложность САУ, обусловленная необходимостью пропорционального переходного режима при повороте несущих роторов; высокий порог входа обусловленной наукоемкостью решения; сложность, а главное дороговизна систем поворотной механики мотогондол; необходимость наличия автомата перекоса в случае бикоптерной схемы; низкая устойчивость схем к стрессовым нагрузкам; снижение доли полезной нагрузки ввиду большей весовой доли конструкции планера и поворотной механики мотогондол и пр. узлов конвертопланов; малая область перемещения ЦД; малый диапазон возможных ЦТ; необходимость разработки собственных алгоритмов управления нелинейными адаптивными системами стабилизации под каждый тип аппарата.
К примеру, из уровня техники известен конвертоплан, содержащий фюзеляж, крылья и размещенные с возможностью поворота на конце каждого из крыльев двигательные группы в виде мотогондол, каждая из которых содержит тянущий и толкающий винты и соответствующие им двигатели, отличающийся тем, что толкающие винты выполнены с возможностью перевода в положение наименьшего сопротивления воздушному потоку при переходе конвертоплана в режим горизонтального полета и отключении двигателя толкающего винта. (RU 182884 U1, Общество с ограниченной ответственностью "АЭРОКСО", 09.05.2018). Недостатками данного конвертоплана является малая энергоэффективность, низкая надежность, сложность и аэродинамические интерференции.
Для обеспечения высокой энергоэффективности в самолетном и вертолетном режиме ВМГ должна быть оптимизирована на обоих режимах полета, что практически сложно реализовать в условиях предложенной компоновки конвертоплана. Обусловлено это тем, что добавление механики на любой из двигателей влечет необходимость повторения того-же технического решения для каждой из мотогондол, что влечет за собой не только усложнение механики, но и усложнение САУ, как в части алгоритмов, так и в части архитектуры управляющей электроники. Что в свою очередь приведет к увеличению стоимости ЛА, а также снижению надежности.
По предложенной полезной модели авторы патента сами приходят к выводу недостаточной загрузки винтов в самолетном режиме для приведенной схемы конвертоплана, подчеркивая недостаточную энергоэффективность решения в самолетном режиме полета. Этого можно было бы избежать, используя ВИШ хотя бы на двух мотогондолах, но ввиду усложненной схемы управления полетом разнотягом каждой из мотогондол, векторным управлением, при отсутствии классических органов управления, использование ВИШ усложнит и без того нагроможденную конструкцию мотогондол. Авторами предложен компромисс, в качестве решения проблемы предложено увеличить нагрузку на ометаемую поверхность части задействованных ВМГ отключив от работы половину винтомоторных групп, соосно расположив дополнительный комплект ВМГ для самолетного режима.
Низкая надежность конвертоплана по предложенной схеме обусловлена необходимостью использования поворотной механики для 4 мотогондол, усложнение ввиду увеличения количества роторов приводит к увеличению количества электронных компонентов, что также приводит к увеличению вероятности сбоя работы компонентов системы, увеличивая вероятность потери управления над аппаратом. Что приводит к необходимости разработки систем резервирования, дублирования и аппаратной диагностики в реальном времени увеличивая вновь стоимость ЛА.
Рассмотрим конвертоплан с поперечным расположением несущих роторов, по типу “bell V22 osprey”, основным недостатком которого является сложность в обеспечении поперечной балансировки во время переходного режима, обусловленная небольшим диапазоном перемещения центра давления в вертолетном режиме относительно центра тяжести. Этот фактор сильно усложняет методы продольной и поперечной балансировки летательного аппарата и соответственно требует усложнения исполнительной механики, алгоритмов управления систем стабилизации, негативно сказывающейся на надежности летательного аппарата, о чем свидетельствуют многочисленные падения.
Компоновка конвертоплана по типу схемы TRIADA позволяет решить проблему продольной, поперечной и курсовой устойчивости, благодаря достаточному запасу устойчивости в самолетном и вертолетном режимах, обусловленному сравнительно большим перемещением центра давления, благодаря разработанной аэродинамической компоновке, ввиду максимального разнесения винтомоторных групп относительно центра тяжести. Такое условие позволяет обеспечить безопасное совмещение полезных качеств летательных аппаратов вертолетного и самолетного типа, открывая возможности безопасного вертикального взлета и посадки, энергоэффективности в самолетном и вертолетном режимах, а также высокой ветровой устойчивости.
Преимущества конвертоплана по схеме Triada перед классическими схемами летательных аппаратов: вертикальные взлет и посадка; осевое маневрирование; зависание под заданными углами крена и тангажа при нулевом результирующем векторе скорости; обеспечение управления аэродинамическим углом атаки при зависании на месте под набегающим потоком; простая инфраструктура обслуживания; высокая устойчивость; отказобезопасность; меньший вес исполнительной механики; большая доля целевой нагрузки; простота обеспечения энергоэффективности в основных режимах полета; самолетном - на скоростях максимальной дальности и продолжительности, переходном, и вертолетном; возможность планировать, обусловленная высоким аэродинамическим качеством; эксплуатация в условиях высокой ветровой нагрузки; возможность использования различных источников питания; отсутствие необходимости в подготовленной инфраструктуре для обслуживания; Возможность взлета и посадки на поверхности имеющие уклон; низкая восприимчивость к турбулентности; высокая маневренность и управляемость; простые алгоритмы стабилизации и управления в переходном режиме; возможность полета в сложных метеоусловиях.
Сущность изобретения
Задачей, решаемой заявленным изобретением является решение проблем, устойчивости, сложности механики, сложности алгоритмов управления, надежности, аэродинамической, топливной и экономической эффективности, посадки и взлета с неровных поверхностей; присущих классическим схемам летательных аппаратов, требующих постоянного вмешательства при предполетном и послеполетном обслуживании человеком, мешающим полной автоматизации процесса эксплуатации. Интеграция разработанного конвертоплана с последующей полной автоматизацией процесса эксплуатации позволят не только внедрить беспилотные технологии в широкий спектр областей промышленности, но также и на порядок повысить экономическую эффективность за счет ускорения процесса дистанционного, беспилотного, воздушного мониторинга земли в кратчайшие сроки с исключением человеческого фактора.
Техническим результатом заявленного технического решения является повышение устойчивости, надежности, улучшение аэродинамической, топливной и экономической эффективности, а также в упрощении механики, упрощении сложности алгоритмов управления,
Технический результат достигается за счет того, что конвертоплан содержит фюзеляж, систему управления, аэродинамические консоли крыла с аэродинамическими управляющими поверхностями, переднее горизонтальное оперение с аэродинамическими управляющими поверхностями, хвостовое оперение, и винтомоторные группы с воздушными винтами, причем винтомоторные группы с воздушными винтами размещены с возможностью поворота на законцовках переднего горизонтального оперения и на хвостовом оперении, при этом конвертоплан выполнен с возможностью обеспечения совпадения аэродинамического центра давления и результирующего вектора тяги, а также с возможностью их взаимного динамического и статического скалярного управления за счет работы аэродинамических управляющих поверхностей и управления вектором тяги каждой из винтомоторной групп, а винтомоторные группы, расположенные на законцовке переднего горизонтального оперения выполнены с встречным вращением воздушного винта и с возможностью обеспечения динамического смещения центра давления, при этом винтомоторные группы выполнены с осевой степенью свободы, а также с возможностью независимого управления друг от друга изменением вектора тяги, оборотов и управлением углом установки лопастей.
В варианте реализации заявленного технического решения переднее горизонтальное оперение выполнено обратной стреловидностью.
В варианте реализации заявленного технического решения винтомоторные группы оснащены механикой винта с изменяемым шагом и диаметром.
В варианте реализации заявленного технического решения органами аэродинамического управления выполнены в виде элеронов.
В варианте реализации заявленного технического решения на законцовках консолей крыла выполнено вертикальное оперение.
В варианте реализации заявленного технического решения винтомоторная группа, расположенная на хвостовом оперении выполнена с возможностью работы воздушного винта в толкающем режиме.
В варианте реализации заявленного технического решения конвертоплан выполнен по схеме утка или по схеме тандем или летающее крыло.
В варианте реализации заявленного технического решения управление результирующим вектором тяги обеспечивается за счет углового смещения оси вращения передних мотогондол в плоскости ZX на угловую величину в пределах от 1 до 45.
Аэродинамическая компоновка:
- самолетная часть: управление ЦД обеспечивает АДК в широком диапазоне скоростей; противоштопорные характеристики; сохранение управляемости в критических режимах; управление аэродинамической устойчивостью; низкая восприимчивость к турбулентности;
- вертолетная часть: широкая область перемещения результирующего вектора тяги; упрощение управления электродвигателем, решение проблемы срыва синхронизации; управление скалярной величиной результирующего вектора тяги; возможность зависания под различными углами крена и тангажа без перемещения.
Управление статической и динамической устойчивостью летательного аппарата:
Область перемещения вектора тяги, приведенная на Рис.1. обеспечивает наиболее эффективную схему управления летательным аппаратом за счет широкой области перемещения относительно приведенного ЦТ на Рис.2.
Векторное управление тягой посредством ВИШ и ВИД каждой из ВМГ, с управлением эффективности по изменению угловой скорости вращения ротора, изменением его диаметра.
Возможность аэродинамического управления при отключенной ВМГ, за счет компоновки аэродинамических органов управления.
Высокая энергоэффективность обусловлена высоким аэродинамическим качеством, обеспеченным благодаря аэродинамической компоновке. Компенсацией ветра с повышением энергоэффективности в режиме зависания при курсовом упреждении вектора набегающего потока, с обеспечением аэродинамической разгрузки крыльями винтомоторной группы. Перекладкой угла установки лопастей для различных режимов полета, реализация управления величиной вектора тяги отдельной ВМГ, подстройка энергоэффективности ВМГ по набору параметров, привязка изменения величины вектора тяги к управлению. Изменением диаметра воздушного винта каждой из ВМГ для каждого из режимов полета. Подстройка параметров эффективности винтомоторной группы по удельной нагрузке на ометаемую поверхность, подстройка эффективности управления вектором тяги, динамическое управление нагрузкой по ометаемой поверхности. Широкой зоной перемещения ЦД, аэродинамическими органами управления, что обеспечивает динамическую подстройку устойчивости летательного аппарата на разных режимах полета, обусловленную изменением расстояния между ЦТ и ЦД. Поперечное продольное и курсовое управление в вертолетных режимах полета обеспечивает прецизионную точность посадки, благодаря возможности парирования положения летательного аппарата результирующим вектором тяги.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием чертежей, на которых показано:
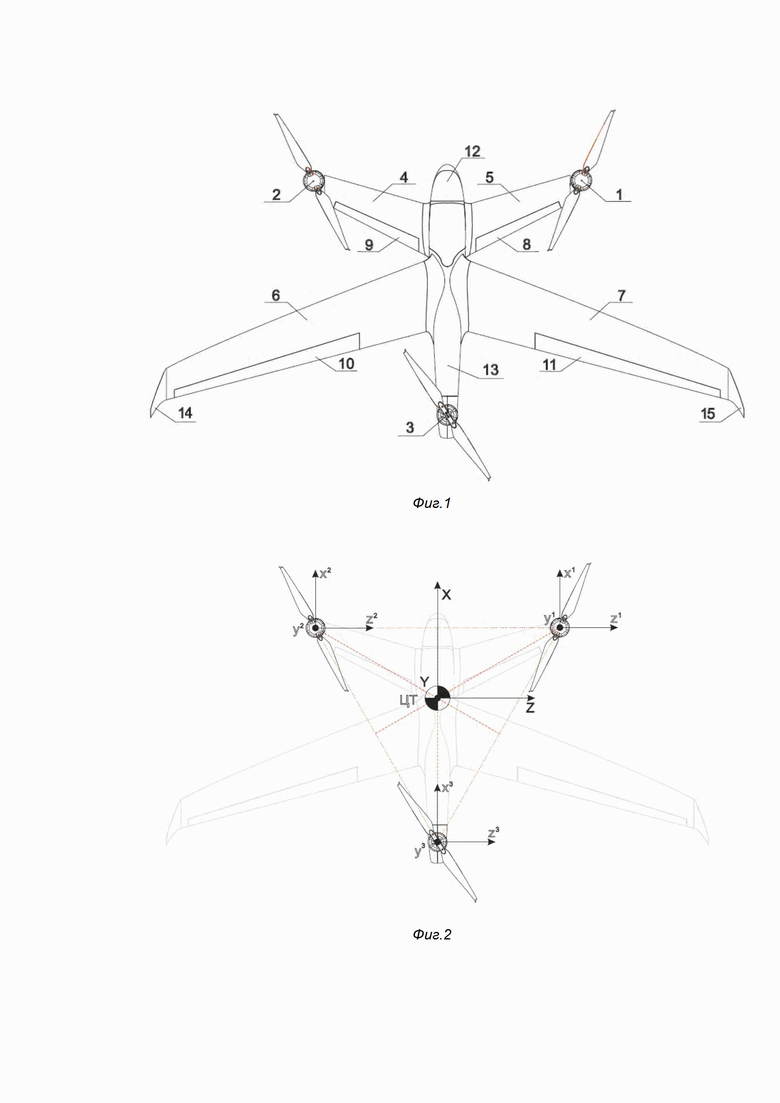
Фиг.1 - описание аэродинамической компоновки конвертоплана (вид сверху);
Фиг. 2 - компоновка винтомоторных групп и привязка СК ВМГ относительно ЦТ;
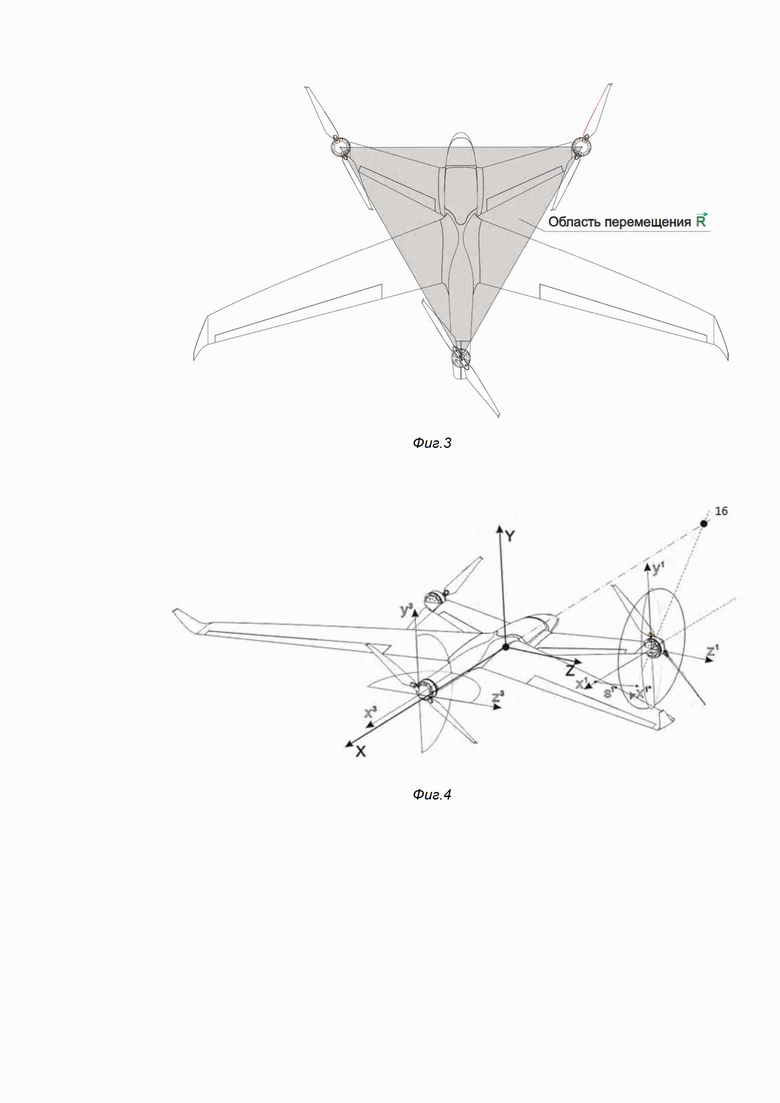
Фиг.3 - область перемещения результирующего вектора тяги;
Фиг.4 - углы управления вектором тяги ВМГ;
Фиг.5 - диапазон смещения оси вращения и СК поворотной мотогондолы ВМГ 1;2;
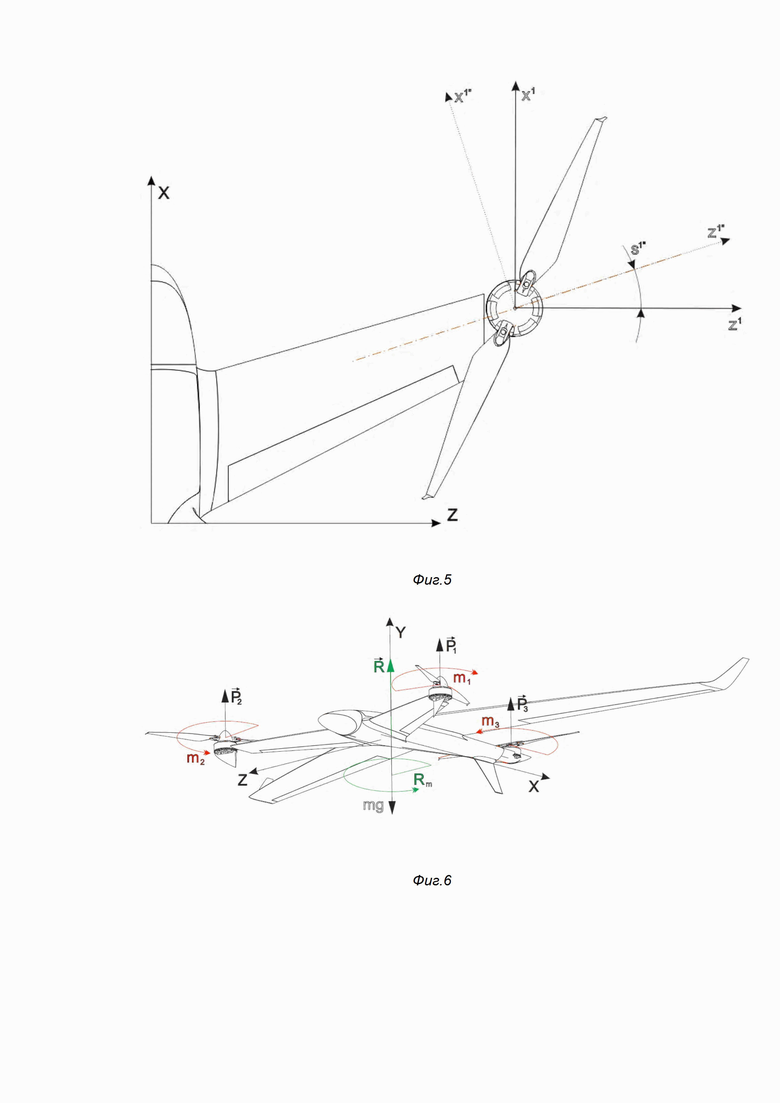
Фиг.6 - схема приложения сил и моментов в устоявшемся вертолетном режиме;
Фиг.7 - схема приложения сил в устоявшемся самолетном режиме;
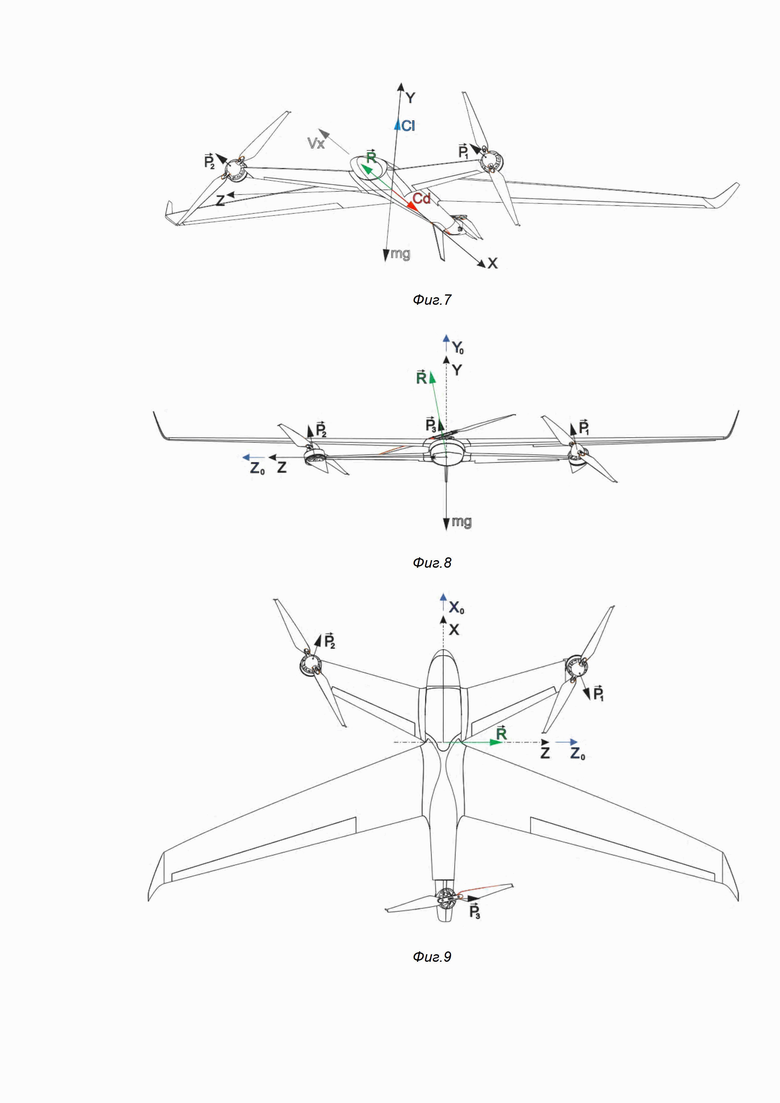
Фиг.8 - схема сложения сил результирующего вектора тяги в проекции спереди при поперечном перемещении без крена.
Фиг.9 - схема сложения сил результирующего вектора тяги в проекции сверху при поперечном перемещении без крена.
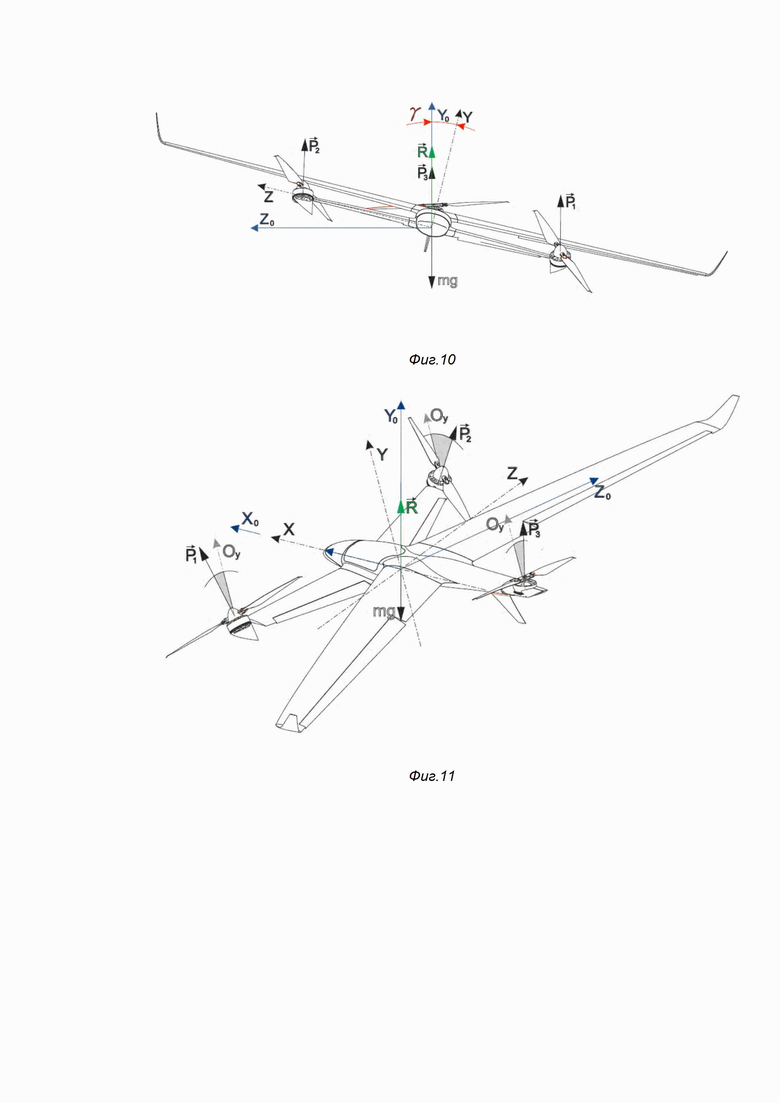
Фиг.10 - схема сложения сил результирующего вектора тяги в проекции спереди при статичном зависании под заданным углом крена;
Фиг.11 - схема сложения сил результирующего вектора тяги при статичном зависании под заданным углом крена;
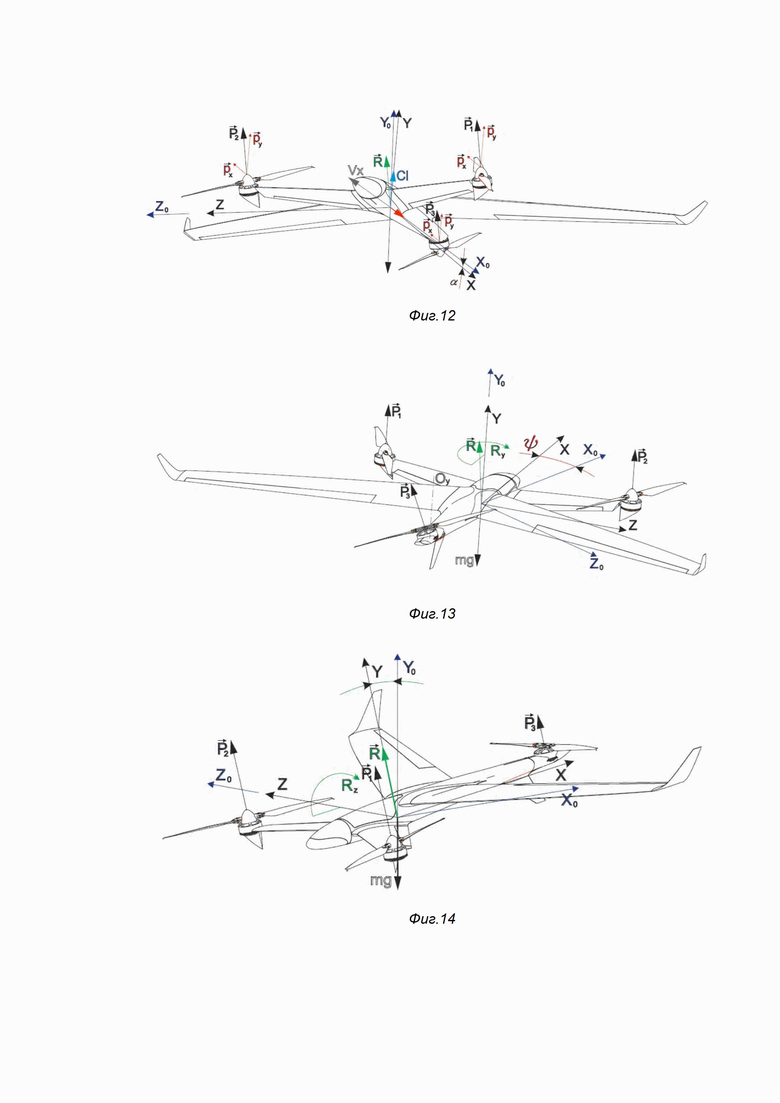
Фиг.12 - схема приложения сил в гибридном режиме полета;
Фиг.13 - схема приложения сил и моментов при курсовом управлении;
Фиг.14 - схема приложения сил и моментов при управлении по тангажу;
Фиг.15- схема приложения сил и моментов при управлении по крену.
На фигурах цифрами обозначены следующие позиции: 1 - передняя правая винтомоторная группа; 2 - передняя левая винтомоторная группа; 3 - хвостовая винтомоторная группа; 4 - переднее горизонтальное оперение; 5 - переднее горизонтальное оперение; 6 - левая несущая консоль крыла; 7- правая несущая консоль крыла; 8 - орган аэродинамического управления; 9 - орган аэродинамического управления; 10 - орган аэродинамического управления; 11 - орган аэродинамического управления; 12 - сменный модуль полезной нагрузки; 13 - фюзеляж; 14 - вертикальное оперение; 15 - вертикальное оперение; 16 - точка пересечения плоскости вращения ВМГ 1 и 2.
Термины, определения, употребляемые в описании и на представленных иллюстрациях:
ВМГ - винтомоторная группа; ГСК - (геостационарная система координат) O0X0Y0Z0, правая декартовая система координат, оси которой и ее начало зафиксированы относительно земли, и выбираются в соответствии с задачей; ПГО - переднее горизонтальное оперение; ССК - (связанная система координат) OXYZ, подвижная, оси которой фиксированы относительно летательного аппарата: OX - продольная, OY - нормальная, OZ - поперечная; СК - система координат; Угол атаки α - угол между продольной осью аппарата и проекцией вектора скорости на плоскость OXY ССК; Угол крена γ - угол между поперечной осью OZ аппарата и осью O0Z0 геостационарной системы координат; Угол тангажа  - Угол между продольной осью OX и горизонтальной плоскостью OX0Z0 ГСК; Угол рыскания ψ - Угол между осью OX0 ГСК и проекцией продольной оси OX на горизонтальную плоскость OX0Z0 ГСК; ЦД - центр давления, точка приложения приращения, равнодействующей аэродинамических сил; ЦТ - центр тяжести, точка приложения равнодействующей силы тяжести; АФ - аэродинамический фокус, точка приложения приращения подъемной силы; САУ - Система автоматического управления; ВИШ - винт изменяемого шага; ВИД - винт изменяемого диаметра; ВМГ - винтомоторная группа; X1Y1Z1- связанная СК ВМГ(1); P1 - скалярная величина вектора тяги ВМГ (1); P2 - скалярная величина вектора тяги ВМГ (2); P3 - скалярная величина вектора тяги ВМГ (3); px - проекция скаляры вектора на ось OX ССК; py - проекция скаляры вектора на ось OY ССК; pz - проекция скаляры вектора на ось OZ ССК; S1 - ось вращения мотогондолы с закрепленной ВМГ(1); S2 - ось вращения мотогондолы с закрепленной ВМГ(2); S3 - ось вращения мотогондолы с закрепленной ВМГ(3); S4 - 2ось вращения мотогондолы с закрепленной ВМГ3; O1 - нормальная ось тяги в вертолетном режиме для ВМГ(1); O2 - нормальная ось тяги в вертолетном режиме для ВМГ(2); O3 - нормальная ось тяги в вертолетном режиме для ВМГ(3); αs - угловое отклонение относительно нормального вектора тяги; R - результирующий вектор тяги; mg - сила тяжести.
- Угол между продольной осью OX и горизонтальной плоскостью OX0Z0 ГСК; Угол рыскания ψ - Угол между осью OX0 ГСК и проекцией продольной оси OX на горизонтальную плоскость OX0Z0 ГСК; ЦД - центр давления, точка приложения приращения, равнодействующей аэродинамических сил; ЦТ - центр тяжести, точка приложения равнодействующей силы тяжести; АФ - аэродинамический фокус, точка приложения приращения подъемной силы; САУ - Система автоматического управления; ВИШ - винт изменяемого шага; ВИД - винт изменяемого диаметра; ВМГ - винтомоторная группа; X1Y1Z1- связанная СК ВМГ(1); P1 - скалярная величина вектора тяги ВМГ (1); P2 - скалярная величина вектора тяги ВМГ (2); P3 - скалярная величина вектора тяги ВМГ (3); px - проекция скаляры вектора на ось OX ССК; py - проекция скаляры вектора на ось OY ССК; pz - проекция скаляры вектора на ось OZ ССК; S1 - ось вращения мотогондолы с закрепленной ВМГ(1); S2 - ось вращения мотогондолы с закрепленной ВМГ(2); S3 - ось вращения мотогондолы с закрепленной ВМГ(3); S4 - 2ось вращения мотогондолы с закрепленной ВМГ3; O1 - нормальная ось тяги в вертолетном режиме для ВМГ(1); O2 - нормальная ось тяги в вертолетном режиме для ВМГ(2); O3 - нормальная ось тяги в вертолетном режиме для ВМГ(3); αs - угловое отклонение относительно нормального вектора тяги; R - результирующий вектор тяги; mg - сила тяжести.
Раскрытие изобретения
Описание конвертоплана по аэродинамической схеме TRIADA Mk. В качестве наиболее эффективной, удобной в эксплуатации и компоновке бортовых систем и агрегатов, выбрана компоновка по схеме “утка”. Выбранная схема обеспечивает относительную простоту поперечной и продольной балансировки, имеет необходимую устойчивость по всем осям, и позволяет реализовать управление в большем диапазоне перемещения центра давления, чем классические схемы, одновременно являясь более безопасной ввиду невозможности допущения критических режимов, приводящих к срывам потока и потери управляемости, что справедливо для классических схем.
Также могут, в варианте реализации заявленного технического решения, конвертоплан может быть выполнен по схеме “тандем” или “летающее крыло”, в зависимости от необходимых летно-технических и эксплуатационных характеристик.
Планер выполнен по схеме с двумя несущими стреловидными аэродинамическими консолями (6,7) с сужением и необходимым по удлинению набором профилей для обеспечения эллиптического распределения подъемной силы.
Вдоль задней кромки переднего горизонтального оперения (4,5) и вдоль задних кромок несущих консолей крыла расположены аэродинамические органы управления (9,8) и соответственно (10,11), работающие в дифференциальном режиме управления.
В носовой части фюзеляжа (13) расположена легкосъемная полезная нагрузка (12), подобная компоновка позволяет обеспечить наибольший диапазон углов для визуального наблюдения с борта.
На законцовках консолей (6,7) крыла расположено вертикальное оперение (14,15), снижающее сумму аэродинамического сопротивления и повышающие курсовую устойчивость.
Для обеспечения большего диапазона центровок, с сохранением энергоэффективности разработано несущее цельноповоротное ПГО обратной стреловидности с тщательно проработанным набором аэродинамических профилей для обеспечения работы в интерферентной картине обтекания скошенного потока от передних ВМГ (1,2).
Для упрощения механики, ПГО (4,5) закреплено стационарно под углом наибольшего аэродинамического коэффициента (АДК), обеспечивающего устоявшийся режим полета с заданной центровкой, на задней кромке ПГО (4,5) расположены аэродинамические управляющие поверхности (9,8), работающие в дифференциальном режиме. Аэродинамические управляющие поверхности (8,9,10,11) выполнены в виде элеронов, работающих в дифференциальном режиме, что обеспечивает управление летательным аппаратом, а также режимами энергоэффективности благодаря продольному управлению перемещения ЦД.
Совокупность вышеперечисленных решений позволила сдвинуть критические режимы срыва обтекания за эксплуатационный диапазон допустимых аэродинамических углов атаки ЛА, срыв потока с ПГО (4, 5) в закритических режимах приводит к перемещению ЦД в хвостовую сторону от ЦТ вызывая пикирующий момент, приводящий к набору скорости ЛА способствующий возвращению в диапазон эксплуатационных диапазонов угла атаки. Таким образом получаем устойчивую самолетную схему, с высоким АДК и широким диапазоном допустимых скоростей с сохранением управляемости в критических режимах полёта.
Компоновка заявленного конвертоплана имеет три маршевых электродвигателя, с расположенными на них ВИШ и ВИД, которые расположены на поворотных мотогондолах обеспечивающих угловое отклонение относительно нормальной оси вектора тяги, реализуя полноценное управление собственным вектором тяги. При этом две винтомоторные группы (1,2) расположены на законцовках переднего горизонтального оперения (5 и 4 соответственно), а винтомоторная группа (3) расположена в хвостовой части фюзеляжа (13).
Схема трикоптера с векторным управлением тяги наиболее эффективна в части энергетики, проста при поперечной и продольной балансировке, устойчива и надежна.
Синхронизация работы ВМГ (1,2,3) посредством САУ обеспечивает управление результирующим вектором тяги, образуя широкую область перемещения вектора тяги, заключенную в треугольник, вершинами которого являются винтомоторные группы. Винтомоторные группы выполнены с собственным исполнительным механизмом, обеспечивая независимое друг от друга изменение собственного вектора тяги, с обеспечением независимого управления каждым из роторов посредством САУ по следующим параметрам: обороты винтомоторной группы; осевое управление вектором тяги; управление углом установки лопастей.
Расстояние между винтомоторными группами, их вес, положение, подобрано таким образом чтобы сохранить осевые моменты инерции аэродинамической схемы без порождения резонансных явлений, усугубления интерферентной картины обтекания планера отбрасываемыми потоками от винтомоторных групп в совокупности приводящих к дестабилизации самолетной схемы на основных режимах полета.
Широкая область перемещения результирующего вектора тяги, обеспечивает высокую устойчивость схемы конвертоплана в вертолетном и гибридном режимах полета, а управление угловой составляющей результирующего вектора тяги относительно нормального вектора тяги обеспечивает, высокую управляемость и открывает новые возможности управления креном и тангажем аппарата в полете, при нулевых векторах скорости, т.е. на одном месте без осевых перемещений. (Фиг 8,9).
Лопасти ВМГ (1,2,3) имеют аэродинамическую перебаллансировку в виде механики винта изменяемого шага и диаметра, такое решение позволяет перебаллансировать лопасти воздушного винта и реализовать алгоритмы адаптации энергоэффективности в разных режимах полета.
Осевые степени свободы винтомоторных групп, смещение осей вращения ВМГ (1 и 2) на угловую величину S1 пределах от 1 до 45 градусов в плоскости ZX выполнены таким образом, чтобы плоскость вращения ВМГ 1 и 2 пересекалась в точке проиллюстрированный на (Фиг. 4,6), обеспечивают возможность параллельного сложения векторов тяги под заданным угловым положением результирующего вектора тяги, а также независимого управления величиной вектора тяги, угловым положением относительно нормальной оси вектора тяги Фиг.9 обозначение “ ”, при скалярном сложении векторов, и их рассчитанном угловым положением, а также необходимой величиной, САУ обеспечивает управление результирующим вектором тяги обеспечивая следующие возможности:
”, при скалярном сложении векторов, и их рассчитанном угловым положением, а также необходимой величиной, САУ обеспечивает управление результирующим вектором тяги обеспечивая следующие возможности:
- изменение угла вектора тяги вокруг продольной и поперечной оси ЛА, обеспечивая управляемое угловое изменение результирующего вектора тяги открываются возможности маневрирования без изменения углов крена и тангажа (Фиг. 8,9),
- зависание на месте под необходимым углом крена и тангажа, (Фиг. 10,11) выполнение посадки на поверхность, находящуюся под углом к горизонту или изменяющую свой угол в динамике, в т.ч. такая схема управления, наиболее подходящая для посадки на качающуюся палубу судна, или обеспечивать компенсацию ветра и турбулентности, действующей на летательный аппарат без воздействия классическими методами маневрирования креном и тангажем.
Положение вектора тяги может быть нескольких видов, в зависимости от применяемых алгоритмов стабилизации, широкая область перемещения вектора тяги отображенная на Фиг. 3. обеспечивает высокую маневренность и управляемость конвертоплана, таким образом может иметь положение совпадающее с центром масс, в таком случае обеспечивается нейтральная устойчивость способствующая управляемости в гибридном режиме, ЦД может иметь положение чуть позади ЦТ в этом случае возникает аэродинамическая устойчивость, при выполнении условий статической и динамической устойчивости ЛА, аэродинамическая устойчивость способствует энергоэффективности полета в режиме самолета. Динамическое изменение ЦД в гибридном режиме обеспечивается путем разгрузки аэродинамических поверхностей - крыльев, роторами, и наоборот.
Таким образом получаем компоновку конвертоплана TRIADA, схема является наиболее управляемой и обеспечивает наибольшую устойчивость при простейших алгоритмах стабилизации, при этом в режиме маневрирования обеспечивает наибольшую эффективность, и простоту обеспечения устойчивости при воздействии внешних факторов.
Для наглядности приведем несколько вариантов скалярного сложения векторов тяги.
Случай с управляемым перемещением вдоль поперечной оси конвертоплана с зафиксированным горизонтом, оси ГСК и ССК совпадают, углы крена, тангажа и рыскания в нуле, угловое отклонение и величина векторов P1 P2 и P3 обеспечивают нулевой результирующий момент и поперечную составляющую проекция которой лежит на оси OZ приводящую в движение аппарат вдоль поперечной оси конвертоплана. (Фиг. 9)
Случай с обеспечением углового отклонения по крену с последующим зависанием на месте под необходимым углом. Величина векторов тяги P1 P2 P3 приводит к изменению крена, (Фиг. 11) независимое угловое отклонение каждого из векторов тяги на величины, а; б; с, приводит к компенсации результирующего момента, а результирующий вектор тяги коллинеарен нормальной оси геостационарной системы координат и компенсирует силу тяжести, оказываемую на конвертоплан, такое условие обеспечивает равновесное состояние конвертоплана под заданным углом крена с нулевым результирующим вектором скорости.
Режимы полета, заявленного конвертоплана:
- вертолетный:
Вес аппарата компенсируется подъемной силой трех роторов (Фиг. 6.) (силы P1; P2; P3) развивающих в совокупности равнодействующую силу, обеспечивающую компенсацию веса летательного аппарата. Два передних ротора (1,2) имеют встречное вращение, направление вращение обусловлено дополнительным увеличением градиента скорости на поверхности крыла, таким образом правый передний двигатель (1) вращается против часовой стрелки, левый передний двигатель (2) вращается по часовой стрелке.
Направление вращения хвостового ротора (3) может быть, как по часовой стрелке, так и против часовой стрелки. Устойчивость обеспечивается динамическим смещением центра давления, разнотягом роторов (область перемещения ЦД указана на Фиг. 3.).
- переходный “гибридный”:
При увеличении горизонтальной составляющей скорости Vx, за счет составляющей подъемной силы роторов Fx, возникновение которой обусловлено поворотом двигателей вокруг поперечной оси аппарата, на поверхность конвертоплана воздействуют аэродинамические силы, равнодействующая этих сил для удобства восприятия разложена на подъемную силу Fl и силу сопротивления Fd, при увеличении составляющей скорости Vx возникает увеличение аэродинамических сил, способствующих компенсации силы MG (собственного веса конвертоплана), при этом паразитная сила Fd кратно аэродинамическому качеству аппарата меньше силы MG, что позволяет полностью перейти в самолетный режим используя крылья в качестве аэродинамической опоры, или наоборот плавное замедление с переходом в вертолетной режим. Сам переходный режим может использоваться в качестве основного режима полета, благодаря сравнительно большему перемещению ЦД проще обеспечить управляемость конвертоплана, что позволяет летать в условиях повышенной ветровой нагрузки турбулентности или при необходимости высокой маневренности. Процесс перехода осуществляется за счет продольного наклона ВМГ хвостового, двух передних, или всех роторов одновременно или по раздельности. При осуществлении переходного режима, посредством продольного поворота хвостовым ротором, его начальное положение должно быть снизу. (Фиг. 12.)
- самолетный:
Обеспечение условия “устоявшегося полета” при целевой скорости Vx выполняется: при равновесии суммы аэродинамических сил Fd силами F1 и F2, а так-же mg подъемной силой Fl созданных статичными аэродинамическими консолями крыла (6,7) и ПГО (4,5) полностью компенсирующими вес аппарата mg, и продольным вектором тяги двигателей являющимся суммой сил F1 и F2 (обеспечивается продольным наклоном вокруг поперечной оси аппарата), компенсирующим аэродинамическое сопротивление Fd при скорости обеспечивающей наибольшую эффективность Vx. Управление в этом режиме обеспечивается аэродинамическими управляющими поверхностями (8,9,10,11), а также векторами тяги Фиг.7.
В варианте реализации заявленного технического решения возможно использование усложненного хвостового механизма, при расположении двигателя снизу мотогондоллы аппарата, и работы винта в толкающем режиме, появляется возможность использования хвостового ротора одновременно в самолетном, и вертолетном режимах.
Такая потребность может возникнуть в случае необходимости повышения удельной энерговооруженности в самолетном режиме, например, для обеспечения высотных полетов, или повышения точности позиционирования при зависании на различных углах.
Обеспечение устойчивости:
- вертолетный режим:
крен: при возникновении угловой ошибки относительно горизонта, САУ обеспечивает упреждающее воздействие по крену приводящее к возрастанию подъемной силы P1 и снижению подъемной силы P2, ВМГ 1 и 2 соответственно, в результате чего возникает упреждающий момент My приводящий конвертоплан вновь к равновесному режиму.
тангаж: при возникновении угловой ошибки относительно горизонта, САУ обеспечивает упреждающее воздействие по тангажу приводящее к возрастанию подъемной силы P1,P2 и снижению подъемной силы P3, ВМГ 1,2 и 3 соответственно, в результате чего возникает упреждающий момент Mx приводящий конвертоплан вновь к равновесному режиму.
рыскание: при возникновении угловой ошибки относительно курса, САУ обеспечивает упреждающее воздействие посредством наклона исполнительных механизмов поворотных мотогондол на угловую величину необходимую для компенсации угловой ошибки в результате чего возникает упреждающий момент Mz приводящий конвертоплан к необходимому положению по азимуту, возвращая на заданный курс.
устойчивость: аэродинамическая компоновка летательного аппарата спроектирована таким образом, что при возникновении внешнего воздействия на летательный аппарат, в устоявшемся режиме, приводящего к угловому отклонению по продольной оси, возникает нарушение равновесия системы сил, и под воздействием результирующих аэродинамических моментов, создаваемых аэродинамическими органами управления, возникает упреждающее воздействие.
переходный режим: совокупность процессов механического и аэродинамического воздействия на летательный аппарат при условии выполнения которых совершается переход из вертолетного режима в самолетный и наоборот, рассмотрим основные стадии переходного режима:
1. начальная фаза - гибридный режим: на начальной стадии переходного режима, для обеспечения совпадения результирующего вектора тяги с продольной осью конвертоплана роторы совершают продольный наклон, раскладывая вектор тяги таким образом чтобы обеспечить равновесие сил тяжести и подъемной силы, но при этом появляется дополнительный вектор тяги способствующий набору скорости летательного аппарата. так как появляется набегающий поток на крыле появляется аэродинамическая составляющая, которая в свою очередь создает поперечный момент вызывающий кабрирование конвертоплана, при этом моменте роторы уже встают в положение "самолет" и БПЛА начинает полет в режиме самолет. Устойчивость в этом режиме обеспечивается разнотягом роторов, обеспечивающих подъемную силу компенсируя в противофазе моменты внешних сил и инерции аппарата, упреждая тем самым дестабилизирующие силы, порождающие момент, выводящий из равновесия систему. Подобный режим выгодно использовать при обеспечении управляемости на низких скоростях, в критических режимах для аэродинамических поверхностей, при этом сами поверхности обеспечивают подъемную силу, но сорваться не могут. Это решение обеспечивает безопасное управление конвертопланом переходных режимах.
2. конечная фаза - аэродинамическое управление: так как появляется набегающий поток на крыле появляется аэродинамическая составляющая, которая в свою очередь создает поперечный момент вызывающий кабрирование конвертоплана при этом моменте роторы уже встают в положение "самолет" и БПЛА начинает полет в режиме самолет. либо сюда можно воткнуть либо туда выше. но это важно учитывать В конечной стадии, при полном обеспечении подъемной силы аэродинамическими поверхностями, осуществляется полный переход на аэродинамические органы управления, в этом режиме летательный аппарат обладает наибольшей энергоэффективностью, а винтомоторная группа работает в энергоэффективном режиме сообщая необходимую силу для поддержания устоявшегося режима полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2024 |
|
RU2835584C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| Трехвинтовой конвертоплан | 2017 |
|
RU2656957C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |
| Способ управления тангажом конвертоплана | 2022 |
|
RU2820358C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |

Изобретение относится к области авиации, а именно к конструкциям конвертопланов. Конвертоплан содержит фюзеляж, систему управления, аэродинамические консоли крыла с аэродинамическими управляющими поверхностями, цельноповоротное переднее горизонтальное оперение с аэродинамическими управляющими поверхностями, хвостовое оперение и винтомоторные группы с воздушными винтами. Винтомоторные группы с воздушными винтами размещены с возможностью поворота на законцовках переднего горизонтального оперения и на хвостовом оперении. Конвертоплан выполнен с возможностью обеспечения совпадения аэродинамического центра давления и результирующего вектора тяги, с возможностью их взаимного динамического и статического скалярного управления за счет работы аэродинамических управляющих поверхностей и управления вектором тяги каждой из винтомоторных групп. Винтомоторные группы, расположенные на законцовках переднего горизонтального оперения, выполнены с встречным вращением воздушного винта и с возможностью обеспечения динамического смещения центра давления, а также возможностью смещения оси вращения передних ВМГ в плоскости ZX. 7 з.п. ф-лы, 15 ил.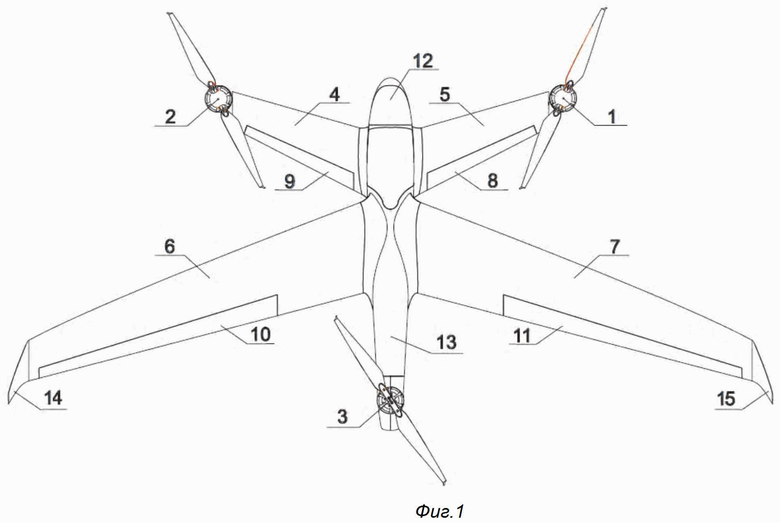
1. Конвертоплан, содержащий фюзеляж, систему управления, аэродинамические консоли крыла с аэродинамическими управляющими поверхностями, переднее горизонтальное оперение с аэродинамическими управляющими поверхностями, хвостовое оперение и винтомоторные группы с воздушными винтами, причем винтомоторные группы с воздушными винтами размещены с возможностью поворота на законцовках переднего горизонтального оперения и на хвостовом оперении, при этом конвертоплан выполнен с возможностью обеспечения совпадения аэродинамического центра давления и результирующего вектора тяги, а также с возможностью их взаимного динамического и статического скалярного управления за счет работы аэродинамических управляющих поверхностей и управления вектором тяги каждой из винтомоторной групп, а винтомоторные группы, расположенные на законцовке переднего горизонтального оперения, выполнены с встречным вращением воздушного винта и с возможностью обеспечения динамического смещения центра давления, при этом винтомоторные группы выполнены с осевой степенью свободы, а также с возможностью независимого управления друг от друга изменением вектора тяги, оборотов и управлением углом установки лопастей.
2. Конвертоплан по п.1, отличающийся тем, что переднее горизонтальное оперение выполнено обратной стреловидностью.
3. Конвертоплан по п.1, отличающийся тем, что винтомоторные группы оснащены механикой винта с изменяемым шагом и диаметром.
4. Конвертоплан по п.1, отличающийся тем, что органы аэродинамического управления выполнены в виде элеронов.
5. Конвертоплан по п.1, отличающийся тем, что на законцовках консолей крыла выполнено вертикальное оперение.
6. Конвертоплан по п.1, отличающийся тем, что винтомоторная группа, расположенная на хвостовом оперении, выполнена с возможностью работы воздушного винта в толкающем режиме.
7. Конвертоплан по п.1, отличающийся тем, что выполнен по схеме утка или по схеме тандем или летающее крыло.
8. Конвертоплан по п.1, отличающийся тем, что управление результирующим вектором тяги обеспечивается за счет углового смещения оси вращения передних мотогондол в плоскости ZX на угловую величину в пределах от 1 до 45.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЗРЫВОМ ПРИ ПРОВЕДЕНИИ СЕЙСМОРАЗВЕДОЧНЫХ РАБОТ | 0 |
|
SU164555A1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| WO 2018208596 A1, 15.11.2018 | |||
| CN 108725775 A, 02.11.2018 | |||
| CN 106800089 A, 06.06.2017. | |||

