Изобретение относится к летательным аппаратам (ЛА), а именно к конвертопланам, то есть преобразуемым ЛА, у которых винт в разных режимах полета может использоваться как для создания подъемной силы, при горизонтальном положении плоскости его вращения, так и для создания тяги в горизонтальном полете, при вертикальном положении плоскости вращения винта. Изобретение может быть использовано во всех областях традиционного применения самолетов, вертолетов, конвертопланов, беспилотных летательных аппаратов.
Актуальность создания конвертоплана по предлагаемому изобретению связана, в частности, с освоением нефтегазоносных шельфов РФ, на которых буровые и эксплуатационные платформы удалены от материка на 500-600 км. Создание на платформах взлетно-посадочных полос (ВПП) для самолетов при глубине океана, достигающей 350 м, сопряжено с большими финансовыми затратами, а эксплуатация вертолетов на таких расстояниях неэкономична. Существующие конвертопланы неустойчивы во взлетно-посадочных режимах. Требуется создать конвертоплан с высоким уровнем устойчивости и соответственно, безопасности полета, и менее зависимый от работы электронных систем стабилизации ЛА.
Уровень техники. В ходе научно-технических и патентных исследований были выявлены следующие аналоги:
1. Вертолет Agusta Westland модели Al 19 (приложение, фиг.П1), [http://www.atkinsadvisors.ru/news/index.shtml "…Модель А119 в настоящее время признана наиболее мощным одно двигательным вертолетом… с максимальной дальностью полета в 980 км…", данные с сайта от 04.12.2009]. Вертолет содержит фюзеляж, двигатель, несущий винт, расположенный над центром масс ЛА, хвостовую балку с расположенным на ее конце рулевым винтом.
Недостатком вертолета является низкая, в сопоставлении с характеристиками самолета и конвертоплана экономичность и существенное, например, для освоения океанских шельфов, ограничение дальности полета без дозаправки - менее 1000 км. В большинстве реализованных схем вертолетов воздушный поток, отбрасываемый винтами вниз, частично тормозится на расположенном под винтом фюзеляже, что также снижает экономичность ЛА.
2. Проект двухфюзеляжного самолета по авторскому свидетельству SU 1785182 A1, (приложение, фиг.П2), аналог [А.с. SU 1785182 A1, В.Н.Семенов, "Двухфюзеляжный самолет с замкнутой системой крыльев", зарегистрировано 01.09.1992], содержит два фюзеляжа, движители, жестко зафиксированные на фюзеляже, крыло, выполненное в виде замкнутой системы несущих поверхностей, разнесенных по длине, ширине и высоте ЛА, причем одна межфюзеляжная часть крыла установлена жестко, а вторая межфюзеляжная часть крыла установлена с возможностью поворота по углу атаки и использования в качестве тормозных щитков. Достоинством указанного проекта является высокая весовая отдача конструкции, связанная с двухфюзеляжностью ЛА и замкнутостью системы крыльев.
Недостатком проекта является отсутствие возможности поворота вектора тяги движителей, что исключает возможность зависания и вертикального взлета и посадки ЛА. Для двухфюзеляжного самолета требуется в 1,5 раза более ВПП.
3. Вертикально взлетающий беспилотный летательный аппарат (БПЛА) Frontline Aerospace (V-STAR), (приложение, фиг.П3), [Авиационная и ракетная техника N 38 (2614) 21.09.2009, изд. ЦАГИ), http://www.flightglobal.com/articles/2009/09/01/331639/picture-v-star-uav-flies.html, данные от 04.12.2009], содержит корпус с расположенным в нем подъемным вентилятором, замкнутое (сочлененное) крыло и маршевый ТРДД, расположенный между задней частью фюзеляжа и задней частью замкнутого крыла. Достоинством этого БПЛА является сочетание возможности вертолетного и самолетного режимов полета.
Недостатком этого БПЛА является наличие двух систем движителей - подъемных и маршевых, работающих только в одном из режимов полета, что почти удваивает вес двигательных установок и тем самым снижает весовую эффективность ЛА.
4. В качестве прототипа изобретения принят конвертоплан Bell V-22 Osprey, (приложение, фиг.П4), [http://ru.wikipedia.org/wiki/V-22_Osprey, данные с сайта от 14.12.2009] содержащий фюзеляж, крыло, оперение, поворотные винтомоторные группы (ВМГ) на концах крыла с возможностью поворота осей ВМГ из вертикального в горизонтальное положение с ходом по углу атаки до 98 градусов. Прототип является единственным реализованным проектом конвертоплана, выпускаемым серийно и стоящим на вооружении в армии США.
Недостатком реализованной в прототипе конструктивной схемы является сложность в обеспечении устойчивости ЛА во взлетно-посадочном режиме, что многократно приводило к катастрофам ЛА [http://www.vertolet-media.ru/chronology/?id=3134, данные от 04.12.2009. "…Несмотря на ряд преимуществ перед вертолетами - большую скорость и дальность полета, самолеты вертикального взлета и посадки оказались более сложными по конструкции и небезопасными в эксплуатации - работа над V-22 несколько раз прерывалась из-за катастроф"]. Безопасность этого аппарата обеспечивается наличием тяжелого раздаточного вала, проходящего по всей длине крыла, сложной и дорогой электронной и механической системами управления, которые существенно повышают стоимость аппарата и снижают долю полезной нагрузки во взлетном весе ЛА. Стоимость 30-летней программы разработки конвертоплана Bell V-22 Osprey оценена в 50,5 млд. $ (2005) при цене единичного аппарата 70 млн. $ (2007).
Предлагаемое изобретение устраняет главный недостаток прототипа - неустойчивость полета, причем система автоматического регулирования, примененная в прототипе и основанная на электронике, в предлагаемом изобретении заменена естественным действием гравитационных сил.
Техническим результатом предлагаемого изобретения является повышение устойчивости полета и, как следствие, повышение безопасности полета конвертоплана.
1. Технический результат достигается тем, что в конвертоплан, содержащий фюзеляж, крыло, оперение, поворотные винтомоторные группы, введены второй фюзеляж, переднее межфюзеляжное горизонтальное оперение, заднее межфюзеляжное горизонтальное оперение и межфюзеляжный центроплан, причем центральные части симметрично расположенных фюзеляжей совместно с передним межфюзеляжным горизонтальным оперением и задним межфюзеляжным горизонтальным оперением образуют жесткий замкнутый силовой контур, с возможностью включения в него также килей, расположенных на задних частях фюзеляжей, а крыло состоит из консольных частей, жестко закрепленных на фюзеляжах, и соосного с ними центроплана, который имеет возможность поворота по углу атаки более чем на 90°, и в центральной части которого закреплена винтомоторная группа с соосными винтами с возможностью разного направления их вращения и с возможностью их поворота относительно оси центроплана, причем центр тяги винтов, при вертикальном положении оси винтомоторной группы, расположен над расчетным центром масс конвертоплана, а расстояния между фюзеляжами и между передним и задним элементами горизонтального оперения в радиальных направлениях превышают диаметр сметаемых винтами окружностей.
2. Технический результат достигается тем, что в конвертоплане по п.1 внешние части крыла выполнены в виде замкнутой крыльевой системы, которые с каждой стороны летательного аппарата имеют передние плоскости с прямой стреловидностью, как бы продолжающие переднее горизонтальное оперение и задние плоскости с обратной стреловидностью, как бы продолжающие заднее горизонтальное оперение, причем передние и задние плоскости с каждой стороны летательного аппарата соединены попарно между собой непосредственно, либо через шайбу с возможностью присоединения к ним консольных поверхностей.
3. Технический результат достигается тем, что в конвертоплане по п.1 воздушные винты расположены в кольцевом обтекателе, закрепленном на поворотном центроплане.
4. Технический результат достигается тем, что в конвертоплане по п.1 лопасти воздушных винтов выполнены с возможностью изменения размаха при переводе их из горизонтальной плоскости вращения в вертикальную плоскость вращения, а выдвигаемые части лопастей входят в соответствующие корневые части лопастей при помощи линейных пьезодвигателей, перемещающихся по направляющему стержню.
5. Технический результат достигается тем, что в конвертоплане по п.1 поворотные узлы, соединяющие фюзеляжи, плоскости центроплана и винтомоторную группу выполнены из сплава с памятью формы с возможностью взаимного бесщелевого разворота указанных агрегатов относительно друг друга [Мовчан А.А, Ньюнт Со, Семенов В.Н. Проектирование силовозбудителя крутящего момента из сплава с памятью формы. М., Труды ЦАГИ, Вып. 2664, 2004, с.220-230].
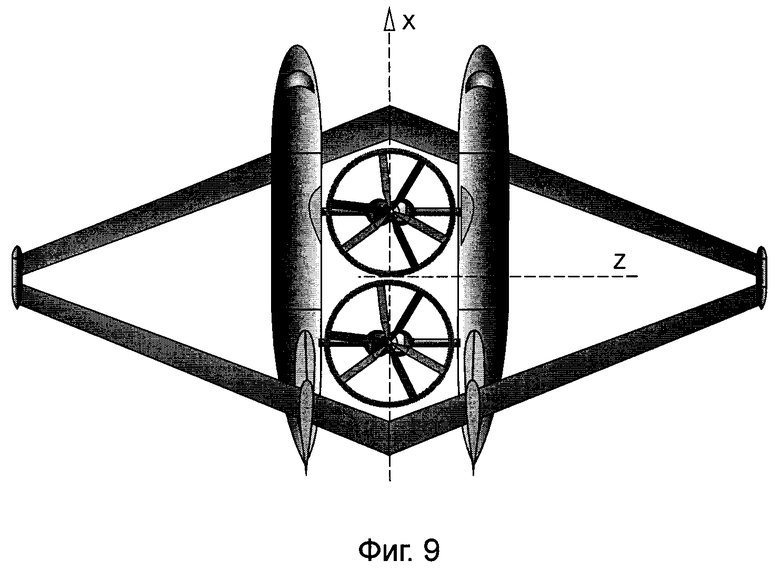
6. Технический результат достигается тем, что в конвертоплане по п.1 между фюзеляжами устанавливается две и более винтомоторных группы, расположенные последовательно, в направлении продольной оси ЛА, каждая из которых крепится к своему межфюзеляжному крылу с возможностью автономного поворота по углу атаки.
Существенные признаки, отличающие предлагаемое изобретение от конвертоплана - прототипа:
1. В режиме взлета-посадки и висения точка приложения подъемной тяги винтов (ц.т.в.) находится над расчетным центром масс (ц.м.) ЛА по изобретению, что обеспечивает естественную устойчивость аппарата за счет сил гравитации и безопасность от возникновения опрокидывающих моментов. (Возникающие отклонения от расчетной балансировки компенсируются традиционными органами управления).
2. Использование соосной схемы винтов для конвертоплана позволяет избежать рассогласования моментных характеристик винтов и произвести взаимную компенсацию реактивных моментов, повысить устойчивость полета ЛА.
3. Использование двухфюзеляжной схемы ЛА и замкнутой системы крыльев позволяет в крейсерских и взлетно-посадочных режимах полета существенно снизить нагруженность крыла и фюзеляжей внутренними усилиями, что увеличивает ресурс конструкции ЛА.
4. Винты могут быть выполнены с возможностью изменения длины лопастей, различных для взлетно-посадочного и для крейсерского режима полета, что позволит оптимизировать расстояние между фюзеляжами, и тем улучшить управляемость ЛА (снизить инерционные моменты при маневрах).
5. Поворотные узлы центроплана могут быть выполнены с использованием актуаторов из сплавов с памятью формы (СПФ), что позволит производить взаимный разворот подконструкций (центроплан-фюзеляж) не с помощью механизмов, а на основе мартенситных преобразований в СПФ, то есть без разрыва соответствующих эпюр деформаций и перемещений - "безшовно", и тем повысить жесткость соединений, снизить вероятность воздействия колебаний на поворотные узлы. Взаимно разворачиваемые подконструкций изготовлены в виде единого жесткого агрегата, крайние части которого имеют возможность взаимного разворота за счет мартенситных деформационных преобразований своей соединительной части (актуатора).
На фигуре 1 показаны проекции конвертоплана по изобретению во взлетно-посадочном режиме и при зависании.
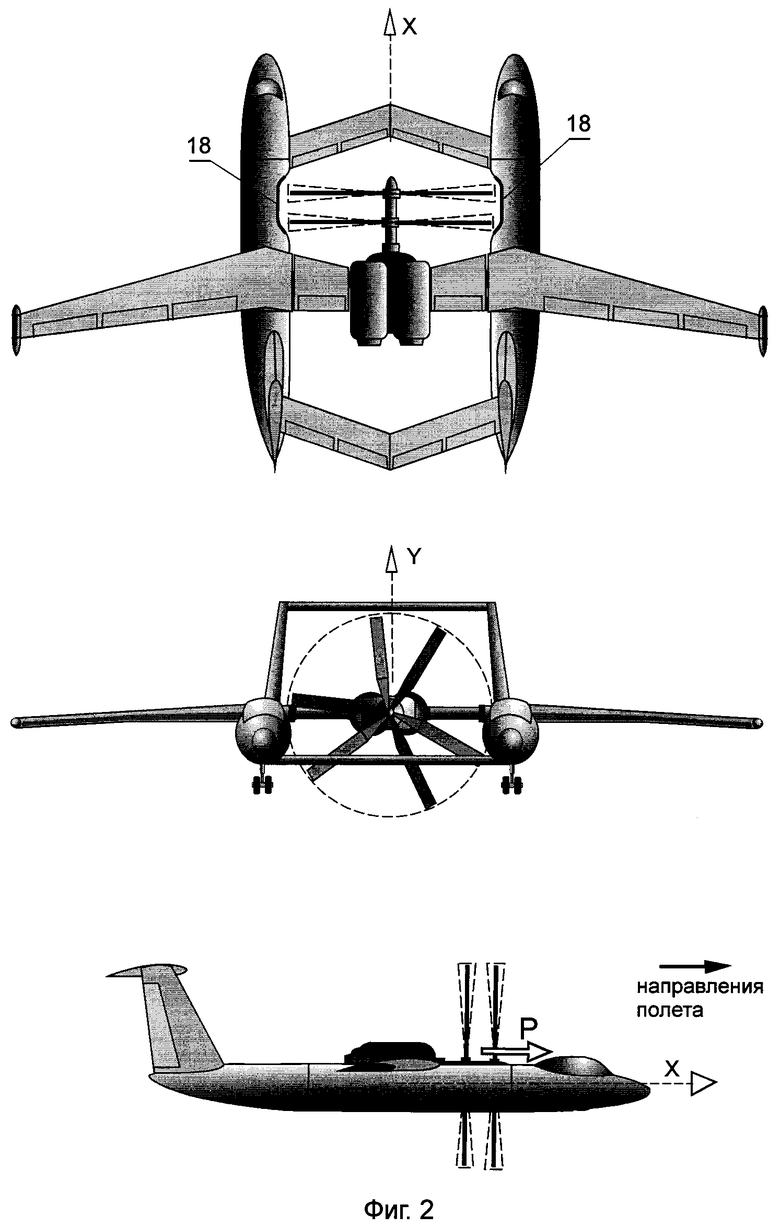
На фигуре 2 показаны проекции конвертоплана в крейсерском полете.
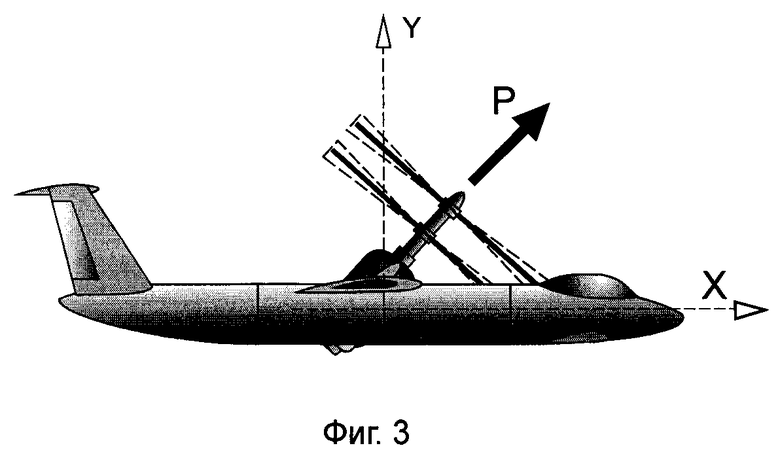
На фигуре 3 изображен конвертоплан в переходном режиме полета.
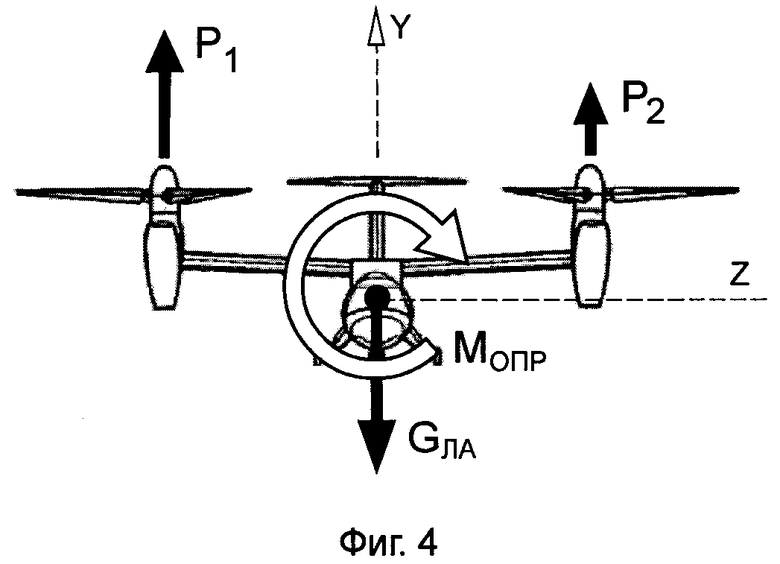
На фигуре 4 показана ситуация нарушения равновесия для прототипа.
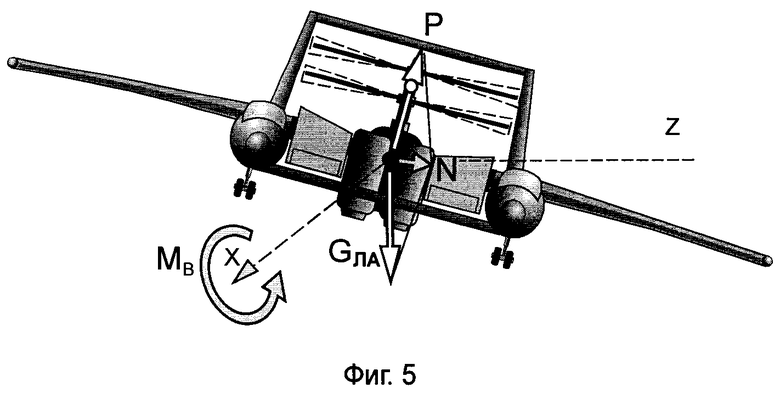
На фигуре 5 показан принцип восстановления равновесия аппарата по предлагаемому изобретению.
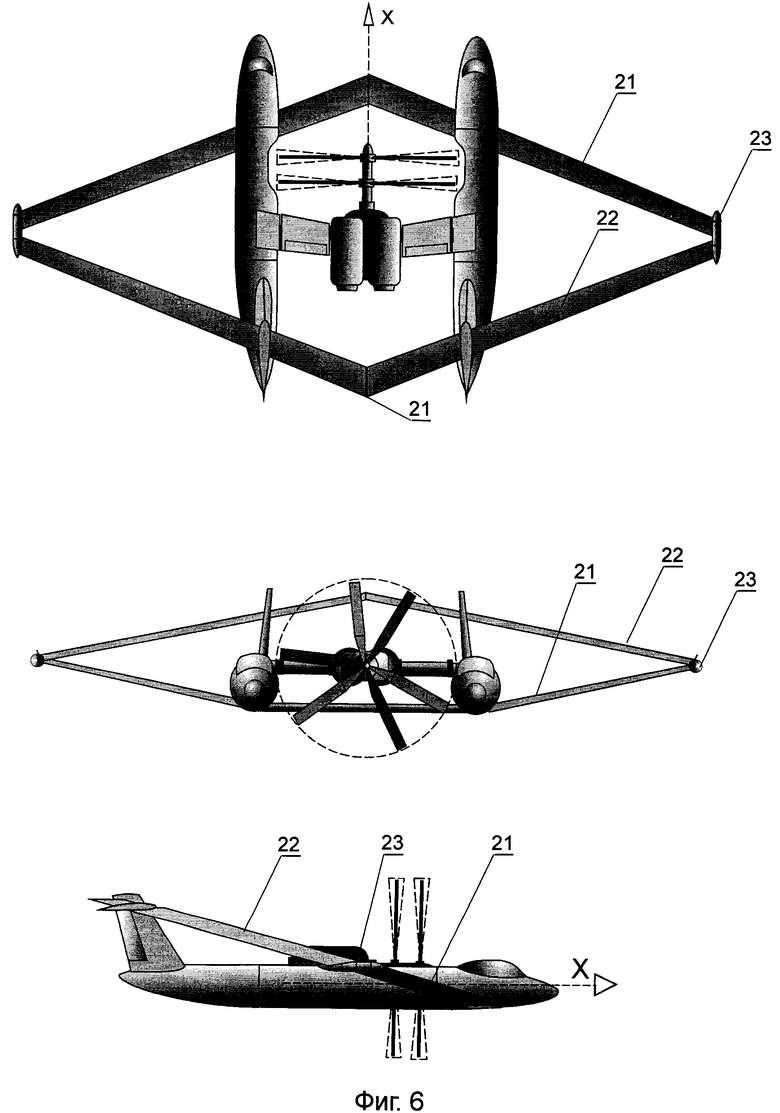
На фигуре 6 показан вариант облика конвертоплана по заявке при применении схемы замкнутого крыла.
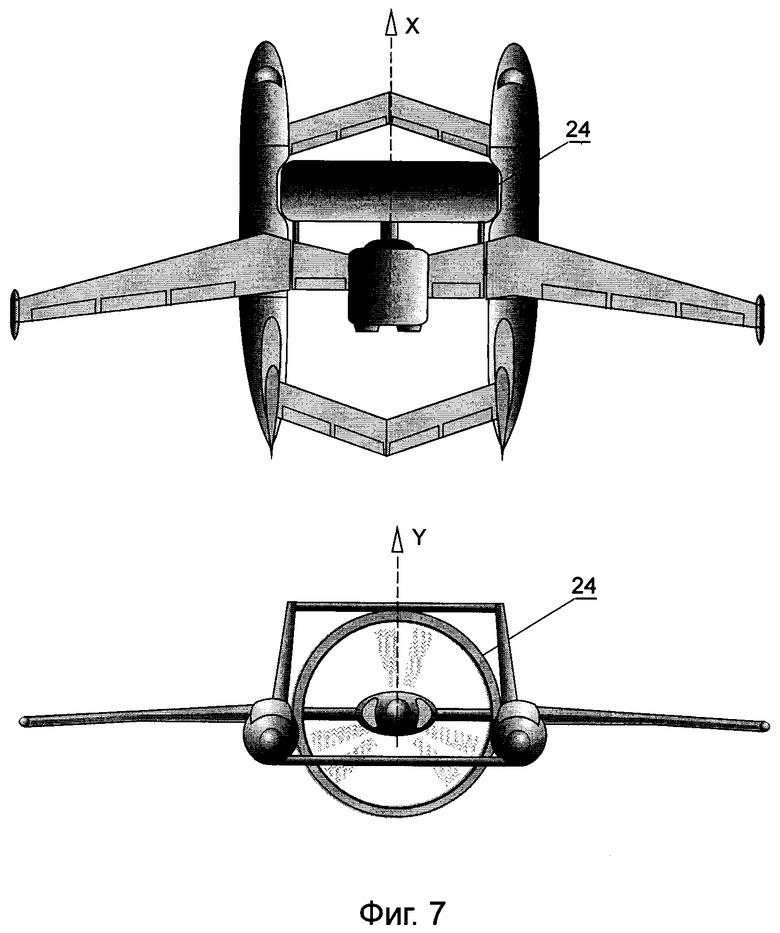
На фигуре 7 показаны проекции возможного варианта облика конвертоплана по заявке в крейсерском режиме полета при размещении винтов в кольцевом обтекателе.
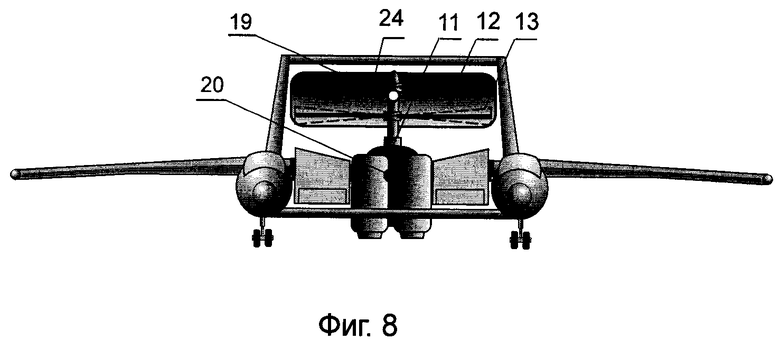
На фигуре 8 показана проекция варианта облика конвертоплана по заявке в режиме взлета-посадки и зависания при размещении винтов в кольцевом обтекателе.
На фигуре 9 показана проекция варианта облика конвертоплана по заявке при использовании двух и более винтовых групп в межфюзеляжном пространстве.
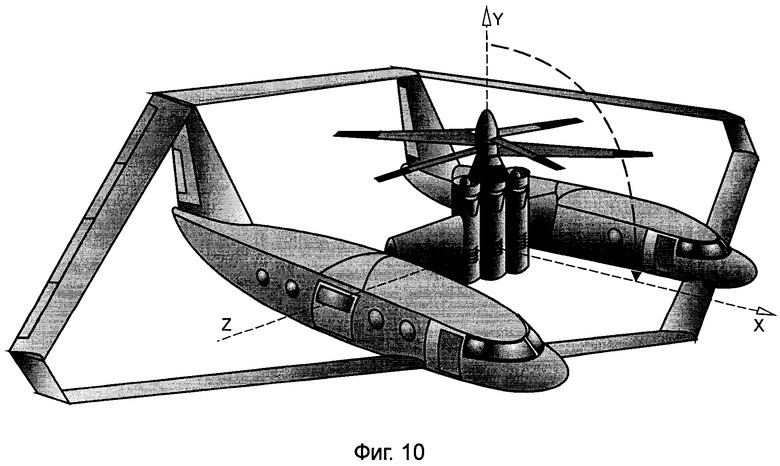
На фигуре 10 показан в изометрическом виде один из возможных обликов ЛА по изобретению.
На фигурах показаны позиции и введены обозначения:
1, 2 - симметрично расположенные фюзеляжи,
3, 4 - кили с рулями направления,
5, 6 - консольные (внешние по отношению к фюзеляжу) части крыла,
7 - "центроплан" - центральная часть крыла, расположенная между фюзеляжами, в районе центра масс ЛА, с возможностью поворота относительно фюзеляжей по углу атаки более чем на 90°. Центроплан может быть выполнен как единый элемент, либо с возможностью автономного поворота его левой и правой плоскостей,
8 - переднее несущее и управляющее межфюзеляжное крыло с элементами механизации, выполняющее также функции переднего горизонтального оперения, далее называемое "ПГО", жестко закрепленное на фюзеляжах,
9 - заднее несущее и управляющее межфюзеляжное крыло с элементами механизации, выполняющее также функции горизонтального оперения, далее называемое "ГО". ГО в различных вариантах исполнения может быть жестко закреплено непосредственно на фюзеляжах, либо на килях, расположенных на задних частях фюзеляжей.
10-13 - винтомоторная группа (ВМГ), в состав которой входят: двигатель (двигатели) 10 с редуктором 11 и воздушные винты 12, 13. Двигатель закреплен на центроплане с возможностью поворота вместе с ним, либо относительно него по углу атаки. Соосные винты 12, 13 имеют возможность противоположного направления вращения, и возможность поворота вектора тяги от направления создания подъемной силы в режиме взлета-посадки до направления полета в крейсерском режиме полета,
14, 15 - приводы (актуаторы) поворота центроплана, расположенные на стыках центроплана с фюзеляжами,
16, 17 - приводы поворота ВМГ относительно центроплана,
18 - зона усиления конструкции фюзеляжа в вертикальных плоскостях вращения винтов (фиг.2),
19 - положение усредненного центра тяги винтов (ц.т.в.),
20 - положение центра масс ЛА (ц.м.),
21-23 внешние, по размаху, элементы замкнутого крыла: передняя несущая поверхность 21 с прямой стреловидностью, задняя несущая поверхность 22 с обратной стреловидностью, соединительный элемент 23 - обтекатель, либо шайба (для варианта исполнения ЛА с замкнутым крылом, фиг.6),
24 - кольцевое крыло вокруг воздушных винтов, X, Y, Z - оси системы координат ЛА,
GЛА - вес ЛА,
Р1, P2 - тяга движителей, расположенных на концах крыла прототипа (фиг.4),
Р, РХ РУ - суммарная тяга движителей ЛА по изобретению (Р - в общем случае,
Рх - горизонтальная компонента тяги, Ру - вертикальная компонента тяги),
Мопр - опрокидывающий момент, возникающий при различии в тяге движителей прототипа (фиг.4),
МВ - момент, возвращающий ЛА по изобретению в устойчивое состояние (фиг.5),
N - равнодействующая сила, равная векторной сумме сил тяги Р и веса GЛА,
L - расстояние между центром тяги винтов и центром тяжести ЛА (фиг.1).
Описание конструкции.
Конвертоплан содержит два фюзеляжа 1, 2 (фиг.1), расположенных симметрично относительно направления полета. К задней части фюзеляжей прикреплены кили 3, 4 с рулями направления. Крыло состоит из консольных частей 5, 6 жестко закрепленных на фюзеляжах, и центроплана 7, который имеет возможность поворота по углу атаки более чем на 90°.
В базовой конфигурации ЛА представляет собой триплан, включающий, помимо крыла, переднее межфюзеляжное крыло с элементами механизации 8, выполняющее также функции переднего горизонтального оперения (ПГО), и заднее межфюзеляжное крыло с элементами механизации 9, выполняющее также функции горизонтального оперения (ГО).
Центральные части симметрично расположенных фюзеляжей 1, 2 совместно с ПГО 8 и ГО 9 образуют жесткий замкнутый силовой контур, в который могут быть включены также кили 3, 4.
Посередине центроплана закреплена винтомоторная группа (ВМГ) содержащая двигатель 10 с редуктором 11, и соосные винты 12, 13.
Между фюзеляжами и центропланом, а также между частями центроплана и ВМГ находятся узлы и приводы (актуаторы) 14-17 для взаимного разворота агрегатов (подконструкций).
В зоне плоскостей вращения винтов в крейсерском полете фюзеляжи имеют упрочняющие накладки безопасности 18 (фиг.2).
При расположении винтов в горизонтальной плоскости аппарата центр вертикальной тяги винтов 19 расположен над расчетным центром масс 20 ЛА.
Предусмотрен вариант исполнения конвертоплана, в котором используется схема замкнутого крыла, элементы которого разнесены по длине, высоте и размаху ЛА (фиг.6). В этом случае в контур замкнутого крыла для симметричной части ЛА включены ПГО, передняя внешняя, относительно фюзеляжей, часть крыла 21 с положительной стреловидностью, соединенная непосредственно, либо через шайбу 22, с задней внешней, относительно фюзеляжей, частью крыла 23 с отрицательной стреловидностью, которая другим концом замкнута на ГО. Такой же замкнутый контур имеет место для симметричной части конвертоплана. В итоге конструктивно-силовая схема ЛА включает большой внешний контур элементов замкнутого крыла в пределах его размаха, а также входящие в его состав замкнутые контуры силовых элементов в межфюзеляжном пространстве и вовне его. От мест стыка указанных передней 21 и задней 22 поверхностей крыло может быть продолжено по размаху консольными частями.
Возможен вариант с расположением воздушных винтов в кольцевом канале 24 (фиг.7, 8). Возможен вариант с расположением двух и более винтомоторных групп и соответствующих несущих и управляющих элементов между фюзеляжами, как показано на фиг.9.
Предлагаемый конвертоплан работает следующим образом.
В режиме взлета и посадки воздушный винт устанавливают в горизонтальной плоскости вращения, и вес ЛА GЛА уравновешивается вертикальной тягой двигателя РY (фиг.1). При увеличении тяги РY конвертоплан взлетает. Для компенсации реактивных моментов соосные винты имеют разное направление вращения.
Расстояние между обводами фюзеляжей в зонах, сметаемых винтами, превышает диаметр винтов, что позволяет переводить винты из плоскости горизонтального вращения в плоскость вертикального вращения.
Центроплан совместно с винтомоторной группой имеют возможность поворота по углу атаки из горизонтального положения в вертикальное и обратно. Возможен вариант поворота ВМГ относительно неподвижного центроплана, жестко закрепленного на фюзеляжах. Еще один вариант предусматривает возможность одновременной установки всех указанных выше пар поворотных механизмов 14-17. В этом случае появляется возможность независимого управления несущими поверхностями центроплана, расположенными между ВМГ и фюзеляжами, что позволяет, например, выполнять следующие функции:
- тормозных щитков,
- оперения для разворота ЛА по курсу в режиме зависания за счет обдува воздушными винтами плоскостей центроплана с дифференциально отклоненными закрылками,
- управляющих поверхностей для бокового скольжения, при этом одна часть центроплана располагается вертикально, а другая горизонтально. Крен ЛА достигается за счет давления вертикального потока на горизонтально расположенную плоскость центроплана и, соответственно, вызывает боковое скольжение ЛА.
После взлета ЛА начинают выполнять поворот винтов вперед (фиг.3), что приводит к появлению горизонтальной составляющей тяги, которая разгоняет ЛА в направлении полета. При этом по мере роста скорости полета все большая часть подъемной силы создается на крыле. При достижении крейсерского режима полета винты вращаются в вертикальной плоскости и создают тягу по направлению полета (фиг.2), а подъемную силу создают консольные и центропланная части крыла, ПГО и ГО.
У прототипа в случае разной тяги двигателей Р1 и Р2, при ручном управлении, возникал опрокидывающий момент МОПР (фиг.4), который пилот не всегда правильно парировал вследствие запаздывания его реакции и особенностей контура управления, что часто приводило к катастрофам, а в настоящее время предотвращается электронной системой управления, которая, в свою очередь, ограничивает действия пилота, что не всегда целесообразно.
В предлагаемом конвертоплане при отклонении ЛА от положения устойчивого равновесия векторы сил веса GЛА и тяги РY образуют угол, отличный от 180° и возникает равнодействующая сила N, которая восстанавливает равновесное состояние (фиг.5). Сила N на плече L, равном расстоянию между центром тяги винтов и центром тяжести, создает момент МВ=N·L, который возвращает аппарат в равновесное состояние.
Воздушный поток, создаваемый винтом и направленный вниз, не встречает на своем пути агрегатов, оказывающих сопротивление, кроме собственно двигателя и центрального крыла, установленного по потоку, и служащего для дополнительной стабилизации и управления ЛА. Это повышает эффективность использования ВМГ на 2-5%.
При умеренных крейсерских скоростях (до 350 км/час) целесообразно расположение винтов в кольцевом канале 24 (фиг.7, 8), поворачиваемом совместно с винтомоторной группой, что обычно приводит к увеличению тяговых характеристик.
Для аппарата с высокой грузоподъемностью между фюзеляжами могут быть расположены две и более винтомоторные группы. При этом сохраняется естественная устойчивость ЛА по крену, а управление по тангажу упрощено тем, что инерционные характеристики ЛА по этому каналу управления имеют более высокие значения.
Конструкция конвертоплана может быть оптимизирована для эксплуатации в режиме укороченного взлета и посадки, что позволяет компромиссно снизить требования к удельным характеристикам двигателей и к длине взлетно-посадочной полосы (ВПП). При старте винты устанавливают наклонно, например, под углом 45 град. так, чтобы избежать их работы в непосредственной близости от земли, при этом за счет вертикальной компоненты тяги РY аппарат частично "разгружается", а горизонтальная компонента тяги РХ разгоняет аппарат до появления достаточной для взлета аэродинамической подъемной силы на крыле.
Тяжелые конвертопланы целесообразно проектировать в схеме с замкнутым крылом. Такая компоновка существенно снижает нагруженность крыла и фюзеляжей внутренними усилиями, как во взлетно-посадочных, так и полетных случаях нагружения, что позволяет дополнительно снизить вес конструкции и за счет этого увеличить долю полезной нагрузки и топлива во взлетном весе ЛА. С учетом V-образности крыльев обеспечивается возможность непосредственного управления подъемной силой (НУПС) и боковой силой (НУБС) в "самолетном" режиме полета.
Достижение технического результата обеспечивается следующими факторами:
1. Устойчивость полета. У конвертоплана-прототипа при различной тяге движителей P1 и Р2, уравновешивающих вес аппарата GЛА, возникает опрокидывающий момент Мопр (фиг.4). Компенсация этого момента пилотом через систему управления может привести к раскачке ЛА, что часто приводило к катастрофам. Созданные для прототипа системы автоматической стабилизации имеют большую стоимость. В предлагаемом конвертоплане при отклонении ЛА от положения равновесия возникает равнодействующая сила N, равная векторной сумме сил тяги Р и веса GЛА (равнодействующая в векторной записи:  ). Сила N на плече L, равном расстоянию между центром тяги винтов и центром тяжести, создает момент Мв=N·L, который возвращает аппарат в равновесное состояние.
). Сила N на плече L, равном расстоянию между центром тяги винтов и центром тяжести, создает момент Мв=N·L, который возвращает аппарат в равновесное состояние.
Поскольку точка приложения подъемной силы расположена над центром масс ЛА (фиг.5), то при наклоне аппарата и соответствующем отклонении оси вращения винта от вертикали возникает восстанавливающий момент, вызванный гравитационными силами.
2. В режимах взлета и посадки под горизонтальной плоскостью вращения винта создается максимально свободное пространство, позволяющее потоку уходить вниз без значительных помех, не тормозясь, как это имеет место на вертолете, что повышает экономичность ЛА на 2-5%. В различных реализациях поворот ВМГ может производиться как независимо от крыла (tilt rotor), так и совместно с ним (tilt wing). Соосная схема винтомоторной группы с различными направлениями вращения винтов позволяет скомпенсировать реактивные и гироскопические моменты от вращения несущих винтов и улучшить управляемость ЛА. В режиме зависания разворот ЛА по курсу производится путем изменения углов атаки лопастей винтов в различных направлениях, при сохранении суммарной подъемной силы. При этом винт с большими углами атаки встречает большее сопротивления, и соответственно увеличивается его реактивная сила. У винта с уменьшенным углом атаки реактивная сила, соответственно, уменьшается. Несбалансированность противоположно направленных реактивных сил создает управляющий момент на изменение курса.
3. Двухфюзеляжность конструктивно-силовой схемы ЛА и замкнутость крыла снижает нагруженность конструкции и позволяет снизить долю веса конструкции во взлетном весе ЛА. Рассмотрим уравнение весового баланса летательных аппаратов, [Болховитинов В.Ф. Пути развития летательных аппаратов. М.: Оборогиз, 1962, 130 с.] известное также как "уравнение существования ЛА"

Запишем уравнение (1) в относительных величинах следующего вида

При сопоставлении летательных аппаратов конкретного класса последние члены уравнения достаточно стабильны, или принимают фиксированные значения, поэтому параметры проекта оптимизируются главным образом путем перераспределения относительных долей первых трех параметров.
В зависимости от главной функции или цели аппарата можно формировать различные критерии оптимальности, такие как топливная эффективность для пассажирских самолетов, дальность полета, максимальная полезная нагрузка и так далее. Из уравнения (2) видно, что достижение экстремального значения по одному из параметров возможно только за счет других. Особую роль в этой группе параметров играет относительная масса конструкции  . Требования обеспечения прочности конструкции, согласно статистике, выводят его на уровень 0,2-0,3 mвзл. Снижая значение параметра
. Требования обеспечения прочности конструкции, согласно статистике, выводят его на уровень 0,2-0,3 mвзл. Снижая значение параметра  , мы предоставляем потенциальную возможность для повышения важных характеристик ЛА.
, мы предоставляем потенциальную возможность для повышения важных характеристик ЛА.
4. Для повышения жесткости конструкции и снижения ее веса может быть использовано замкнутое крыло, (фиг.6), элементы которого могут располагаться на различной высоте, под различными углами, образовывать дополнительные замкнутые контуры с внешних сторон фюзеляжей, что позволяет снизить вес крыльевой системы на 20-25% [Семенов В.Н. Конструкции самолетов замкнутой и изменяемой схем. М.: Изд. ЦАГИ, 2006]. V-образность расположения крыльев позволяет применять в полете режимы непосредственного управления подъемной и боковой силой.
Варианты реализации конвертоплана по изобретению предусматривают: прямолинейные, ломаные либо криволинейные формы осей элементов крыла с различными углами стреловидности и V-образности; различные комбинации шассийных групп. Может иметь место реализация с интегральным корпусом и плавным переходом подконструкций (фюзеляж, крыло и др.) друг в друга, но всегда с соблюдением главного принципа: расположения вектора вертикальной тяги над расчетным центром масс ЛА. При этом подразумевается, что точного совпадения не достигается, и гравитационная составляющая является главным, но не единственным элементом балансировки ЛА. При загрузке ЛА, изменении его массы в полете и выполнении маневров в качестве элементов для балансировки и управления ЛА используются и другие, традиционные элементы управления полетом.
Внедрение конвертоплана предлагаемой схемы обеспечивает:
- повышение безопасности полета вследствие повышения его устойчивости,
- в вариантах с замкнутым контуром крыла вследствие снижения относительного веса конструкции возможно увеличение дальности полета без дозаправки и повышение экономичности перевозок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2024 |
|
RU2835584C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
Изобретение относится к конвертопланам, у которых винты в разных режимах полета могут использоваться как для создания подъемной силы, так и для создания тяги в направлении полета. Конвертоплан содержит два фюзеляжа, переднее межфюзеляжное горизонтальное оперение, заднее межфюзеляжное горизонтальное оперение и межфюзеляжный центроплан. Центральные части симметрично расположенных фюзеляжей совместно с передним межфюзеляжным горизонтальным оперением и задним межфюзеляжным горизонтальным оперением образуют жесткий замкнутый силовой контур, который включает в себя еще кили, расположенные на задних частях фюзеляжей. Крыло состоит из консольных частей, жестко закрепленных на фюзеляжах. Внешние части крыла могут быть выполнены также в виде замкнутой крыльевой системы. Конвертоплан в разных вариантах исполнения может содержать одну, две или более плоскостей центроплана. Плоскости центроплана соединены с фюзеляжами через поворотные узлы, с возможностью их поворота по углу атаки более чем на 90°. В центральной части центропланов закреплены винтомоторные группы с соосными воздушными винтами разного направления вращения. Винты имеют возможность поворота относительно оси центроплана. Центр тяги винтов, при вертикальном положении осей винтомоторных групп, расположен над расчетным центром масс конвертоплана. 3 н. и 3 з.п. ф-лы, 10 ил.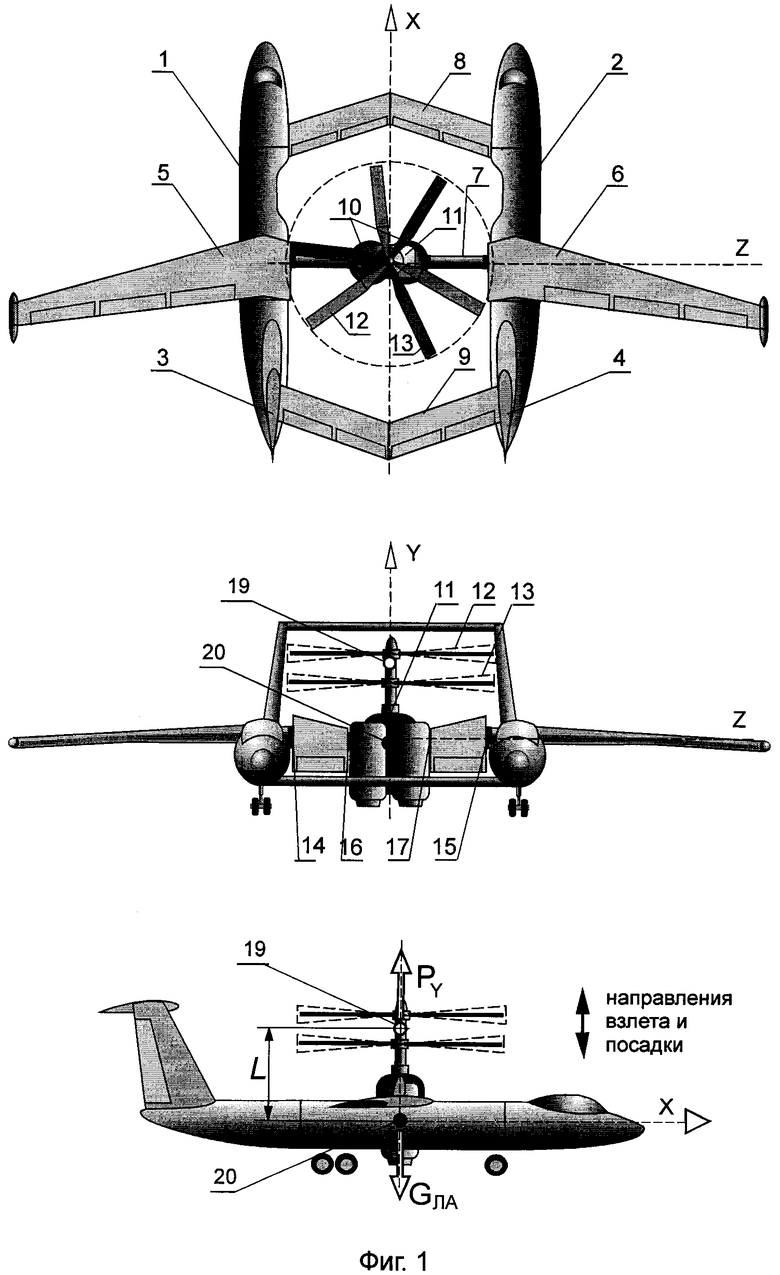
1. Конвертоплан, содержащий фюзеляж, крыло, оперение, поворотные винтомоторные группы, отличающийся тем, что введены второй фюзеляж, переднее межфюзеляжное горизонтальное оперение, заднее межфюзеляжное горизонтальное оперение и межфюзеляжный центроплан, причем центральные части симметрично расположенных фюзеляжей совместно с передним межфюзеляжным горизонтальным оперением и задним межфюзеляжным горизонтальным оперением образуют жесткий замкнутый силовой контур с возможностью включения в него также килей, расположенных на задних частях фюзеляжей, а крыло состоит из консольных частей, жестко закрепленных на фюзеляжах, и соосного с ними центроплана, плоскости которого соединены с фюзеляжами через поворотные узлы с возможностью их поворота по углу атаки более чем на 90°, и в центральной части которого закреплены винтомоторные группы с соосными воздушными винтами с возможностью разного направления их вращения и возможностью их поворота относительно оси центроплана, причем центр тяги винтов при вертикальном положении оси винтомоторной группы расположен над расчетным центром масс конвертоплана.
2. Конвертоплан по п.1, отличающийся тем, что поворотные узлы, соединяющие фюзеляжи, плоскости центроплана и винтомоторные группы выполнены из сплава с памятью формы с возможностью взаимного бесщелевого разворота указанных агрегатов относительно друг друга.
3. Конвертоплан по п.1, отличающийся тем, что лопасти воздушных винтов выполнены с возможностью изменения размаха при переводе их из горизонтальной плоскости вращения в вертикальную плоскость вращения, при этом выдвигаемые части лопастей входят в соответствующие корневые части лопастей при помощи линейных пьезодвигателей, перемещающихся по направляющему стержню.
4. Конвертоплан по п.1, отличающийся тем, что воздушные винты расположены в кольцевом обтекателе, закрепленном на поворотном центроплане.
5. Конвертоплан, содержащий фюзеляж, крыло, оперение, поворотные узлы и винтомоторные группы, отличающийся тем, что введены второй фюзеляж, переднее межфюзеляжное горизонтальное оперение, заднее межфюзеляжное горизонтальное оперение и межфюзеляжный центроплан, причем центральные части симметрично расположенных фюзеляжей совместно с передним межфюзеляжным горизонтальным оперением и задним межфюзеляжным горизонтальным оперением образуют жесткий замкнутый силовой контур с возможностью включения в него также килей, расположенных на задних частях фюзеляжей, а внешние части крыла выполнены в виде замкнутой крыльевой системы, которые с каждой из внешних сторон фюзеляжей имеют передние плоскости с прямой стреловидностью, замкнутые на переднее горизонтальное оперение, и задние плоскости с обратной стреловидностью, замкнутые на заднее горизонтальное оперение, причем передние и задние плоскости с каждой стороны летательного аппарата соединены попарно между собой через шайбы, а также между фюзеляжами установлен центроплан, плоскости которого соединены с фюзеляжами через поворотные узлы с возможностью их поворота по углу атаки более чем на 90°, и в центральной части которого на поворотных узлах закреплены винтомоторные группы с соосными воздушными винтами с возможностью разного направления их вращения и возможностью их поворота относительно оси центроплана, причем центр тяги винтов при вертикальном положении оси винтомоторной группы расположен над расчетным центром масс конвертоплана.
6. Конвертоплан, содержащий фюзеляж, крыло, оперение, поворотные узлы и винтомоторные группы, отличающийся тем, что введены второй фюзеляж, переднее межфюзеляжное горизонтальное оперение, заднее межфюзеляжное горизонтальное оперение, причем центральные части симметрично расположенных фюзеляжей совместно с передним межфюзеляжным горизонтальным оперением и задним межфюзеляжным горизонтальным оперением образуют жесткий замкнутый силовой контур с возможностью включения в него также килей, расположенных на задних частях фюзеляжей, и два или более межфюзеляжных центропланов, установленных последовательно в направлении продольной оси ЛА, в центральных частях которых установлены винтомоторные группы с соосными воздушными винтами, имеющими разное направление вращения и возможность поворота винтомоторных групп из горизонтального положения по направлению полета в вертикальное на угол более чем 90° с помощью поворотных узлов, расположенных в зонах крепления плоскостей центропланов к фюзеляжам и в зонах крепления плоскостей центропланов к винтомоторным установкам.
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1992 |
|
RU2028964C1 |
| ГИДРОКОНВЕРТОЭКРАНОПЛАН | 2004 |
|
RU2264951C1 |
| US 2005127238 А1, 16.06.2005 | |||
| US 4146199 А, 27.03.1979 | |||
| US 3335977 А, 15.08.1967 | |||
| САМОЛЕТ ДЛЯ СРЕДНИХ АВИАЛИНИЙ | 1992 |
|
RU2078715C1 |
| Устройство для сортировки бревен | 1981 |
|
SU1003940A1 |
| US 2005127238 A1, 16.06.2005 | |||
| Способ получения акрилонитрила | 1972 |
|
SU652885A3 |

