Изобретение относится к области кузнечно-прессового производства, а именно к системам компенсации погрешности обеспечения ковочного размера радиально-ковочных машин с пульсаторным гидроприводом бойков.
Наиболее близким к заявляемому техническому устройству аналогом является принятая в качестве прототипа система компенсации погрешности обеспечения ковочного размера радиально-ковочной машины с приводом бойков в виде главных гидроцилиндров, полости рабочего хода которых соединены с рабочими камерами соответствующих насосов-пульсаторов, содержащая два четырехлинейных гидрораспределителя, один из которых является двухпозиционным и выполнен с механическим управлением, а именно его золотник кинематически связан с приводом машины, а другой является трехпозиционным и выполнен с электрическим управлением, при этом исполнительные каналы двухпозиционного гидрораспределителя с механическим управлением соединены с полостями рабочего и обратного ходов главных гидроцилиндров радиально-ковочнои машины, а его напорный и выходной каналы соединены с исполнительными каналами трехпозиционного гидрораспределителя с электрическим управлением, напорный канал которого соединен с гидравлическим источником питания, а сливной канал - со сливом [1].
При работе машины в период сведения бойков все каналы двухпозиционного гидрораспределителя с механическим управлением перекрыты, в результате чего работа известной системы компенсации блокируется. В период же холостого хода (во время разведения бойков) один из исполнительных каналов указанного гидрораспределителя соединяется с его входным каналом, а другой исполнительный канал соединяется с выходным каналом. В последнем случае с помощью гидрораспределителя с электрическим управлением путем подачи дополнительного объема рабочей жидкости в полости рабочего хода главных гидроцилиндров или слива жидкости из этих полостей положение задней мертвой точки выходного звена каждого главного гидроцилиндра (а значит, и соответствующего бойка) и следовательно, установка ковочного размера могут быть изменены, а именно при подаче дополнительного объема жидкости ковочный размер уменьшается, при отборе жидкости ковочный размер увеличивается.
При недокове, что соответствует ситуации, когда выходное звено главного гидроцилиндра в процессе сведения бойков не доходит до положения, соответствующего заданному значению ковочного размера, на соответствующий электромагнит трехпозиционного гидрораспределителя подается электрический сигнал, вызывающий перемещение золотника данного гидрораспределителя в положение, при котором его исполнительный канал, соединенный с полостями рабочего хода главных гидроцилиндров машины, сообщается с напорным каналом. Рабочая жидкость от гидравлического источника питания поступает в рабочие полости главных гидроцилиндров, что при прочих равных условиях влечет за собой смещение задней мертвой точки выходного звена каждого главного гидроцилиндра в направлении межбойкового пространства и, соответственно, ведет к устранению недокова.
При перекове, что соответствует ситуации, когда выходное звено главного гидроцилиндра в процессе сведения бойков проходит дальше положения, соответствующего заданному значению ковочного размера, на соответствующий электромагнит трехпозиционного гидрораспределителя подается электрический сигнал, вызывающий перемещение золотника данного гидрораспределителя в положение, при котором его исполнительный канал, соединенный с полостями рабочего хода главных гидроцилиндров машины, сообщается со сливным каналом. Рабочая жидкость из рабочих полостей главных гидроцилиндров при этом вытесняется на слив (в гидробак), что при прочих равных условиях влечет за собой смещение задней мертвой точки выходного звена каждого главного гидроцилиндра в направлении от межбойкового пространства и, соответственно, ведет к устранению перекова.
Поскольку рассматриваемая система компенсации погрешности обеспечения ковочного размера обеспечивает возможность изменения объема рабочей жидкости в полости рабочего хода главного гидроцилиндра (исчисляемого для состояния, когда выходное звено гидроцилиндра находится в задней мертвой точке) на любую величину в практически необходимых при работе радиально-ковочной машины пределах, то она позволяет непосредственно в процессе ковки (в периоды разведения бойков) осуществлять изменение ковочного размера и благодаря этому ковать заготовки переменного профиля.
Однако известная система до момента времени, когда выходное звено главного гидроцилиндра дойдет до передней мертвой точки, не позволяет проконтролировать, соответствует ли количество жидкости, которое за один цикл работы машины добавлено в силовой контур или слито из него, тому количеству жидкости, которое было необходимо добавить или слить для обеспечения нужной величины ковочного размера.
Вследствие этого, она обладает пониженной точностью компенсации погрешности обеспечения ковочного размера, что является ее недостатком.
Наличие соединения одного из исполнительных каналов используемых гидрораспределителей с полостями рабочего хода главных гидроцилиндров неизбежно приводит в процессе работы рассматриваемой системы компенсации к дополнительным утечкам рабочей жидкости из указанных полостей рабочего хода на слив через зазоры в золотниковых парах гидрораспределителей, которые должны компенсироваться с помощью этой же системы. Это предопределяет пониженный коэффициент полезного действия данной системы, что также является ее недостатком.
Технической задачей, решаемой изобретением, является повышение точности работы и коэффициента полезного действия системы компенсации погрешности обеспечения ковочного размера радиально-ковочной машины с пульсаторным гидроприводом.
Для решения поставленной задачи в известной системе компенсации погрешности обеспечения ковочного размера радиально-ковочной машины с приводом бойков в виде главных гидроцилиндров, полости рабочего хода которых соединены с рабочими камерами соответствующих насосов-пульсаторов, согласно изобретению применены мультипликаторы, каждый из которых выполнен с двумя выходными полостями, датчики перемещения выходных звеньев главных гидроцилиндров и поршней мультипликаторов, четырехлинейные трехпозиционные дросселирующие гидрораспределители с электрическим управлением, четырехлинейные направляющие гидрораспределители с электрическим управлением и электронный блок управления, входы которого соединены с выходами упомянутых датчиков перемещения выходных звеньев главных гидроцилиндров и поршней мультипликаторов, а выходы - с электрическими входами четырехлинеиных трехпозиционных дросселирующих гидрораспределителей с электрическим управлением, исполнительные каналы каждого из которых соединены с входными полостями соответствующего мультипликатора, напорный канал соединен с гидравлическим источником питания, а сливной канал - со сливом, при этом каждая из двух выходных полостей каждого мультипликатора соединена с силовой гидролинией между полостью рабочего хода главного гидроцилиндра радиально-ковочной машины и рабочей камерой соответствующего насоса-пульсатора и с напорным гидробаком через двухлинейные двухпозиционные запорные устройства, полости управления которых соединены с исполнительными каналами соответствующего четырехлинейного направляющего гидрораспределителя с электрическим управлением, электрический вход которого связан с дополнительным выходом электронного блока управления, напорный канал - с гидравлическим источником питания, а сливной канал - со сливом.
В частных случаях исполнения изобретение характеризуется следующими отличительными признаками.
Согласно изобретению каждое двухлинейное двухпозиционное запорное устройство выполнено в виде двух встречно гидравлически соединенных односторонних гидрозамков.
Согласно изобретению каждая из двух выходных полостей мультипликатора соединена с напорным гидробаком через предохранительный клапан с обратным клапаном с усиленной пружиной. Согласно изобретению электронный блок управления выполнен в виде контроллера.
Применение мультипликаторов, каждый из которых выполнен с двумя выходными полостями, датчиков перемещения выходных звеньев главных гидроцилиндров и поршней мультипликаторов, четырехлинейных трехпозиционных дросселирующих гидрораспределителей с электрическим управлением, четырехлинейных направляющих гидрораспределителей с электрическим управлением и электронного блока управления, входы которого соединены с выходами упомянутых датчиков перемещения выходных звеньев главных гидроцилиндров и поршней мультипликаторов, а выходы - с электрическими входами четырехлинейных трехпозиционных дросселирующих гидрораспределителей с электрическим управлением, исполнительные каналы каждого из которых соединены с входными полостями соответствующего мультипликатора, напорный канал соединен с гидравлическим источником питания, а сливной канал - со сливом, при этом каждая из двух выходных полостей каждого мультипликатора соединена с силовой гидролинией между полостью рабочего хода главного гидроцилиндра радиально-ковочной машины и рабочей камерой соответствующего насоса-пульсатора и с напорным гидробаком через двухлинейные двухпозиционные запорные устройства, полости управления которых соединены с исполнительными каналами соответствующего четырехлинейного направляющего гидрораспределителя с электрическим управлением, электрический вход которого связан с дополнительным выходом электронного блока управления, напорный канал - с гидравлическим источником питания, а сливной канал - со сливом, обеспечивает возможность изменения объема рабочей жидкости в полости рабочего хода главного гидроцилиндра (исчисляемого для состояния, когда выходное звено гидроцилиндра находится в задней мертвой точке) с высокой точностью на любую величину в практически необходимых при работе радиально-ковочной машины пределах при минимальных утечках рабочей жидкости из рабочей полости и тем самым приводит к повышению точности работы и коэффициента полезного действия системы компенсации погрешности обеспечения ковочного размера радиально-ковочной машины.
При недокове или перекове, что фиксируется с помощью датчика перемещения выходного звена соответствующего главного гидроцилиндра, в соответствии с величиной недокова или перекова в электронном блоке управления (контроллере) производится вычисление значения изменения координаты поршня мультипликатора, которое необходимо для подачи в полость рабочего хода главного гидроцилиндра или отбора из этой полости объема жидкости, обеспечивающего при прочих равных условиях достижение ковки точно с заданным размером на следующем цикле работы машины. Далее сразу после прохода бойками передней мертвой точки с выхода электронного блока управления (контроллера) на электрический вход соответствующего дросселирующего гидрораспределителя поступает управляющий сигнал, пропорциональный величине разности между координатой поршня мультипликатора, соответствующей положению, в которое он должен переместиться для компенсации погрешности обеспечения ковочного размера, и текущей координатой поршня мультипликатора, фиксируемой с помощью датчика его перемещения. В результате этого, если на предыдущем цикле работы машины был недоков, то в период разведения бойков, когда давление в силовом контуре невелико, в указанный контур добавляется количество жидкости, необходимое для устранения этого недокова. Если же на предыдущем цикле работы машины был переков, то в период разведения бойков из силового контура отбирается количество жидкости, необходимое для устранения этого перекова. В итоге обеспечивается высокая точность ковки.
Полости управления двухлинейных двухпозиционных запорных устройств, при подаче в которые рабочей жидкости под давлением происходит открытие проходного сечения запорных устройств (далее эти полости для краткости называются "полости управления открытием"), и полости управления, при подаче в которые рабочей жидкости под давлением происходит закрытие проходного сечения запорных устройств (далее эти полости для краткости называются "полости управления закрытием"), соединены между собой следующим образом. Полости управления открытием запорных устройств, соединяющих первую из выходных полостей мультипликатора с соответствующей силовой гидролинией, а вторую - с напорным гидробаком, и полости управления закрытием запорных устройств, соединяющих первую из выходных полостей мультипликатора с напорным гидробаком, а вторую - с соответствующей силовой гидролинией, соединены между собой и с одним из исполнительных каналов соответствующего направляющего гидрораспределителя. Полости же управления закрытием запорных устройств, соединяющих первую из выходных полостей мультипликатора с соответствующей силовой гидролинией, а вторую - с напорным гидробаком, и полости управления открытием запорных устройств, соединяющих первую из выходных полостей мультипликатора с напорным гидробаком, а вторую - с соответствующей силовой гидролиниеи, соединены между сооой и с другим из исполнительных каналов упомянутого направляющего гидрораспределителя. Следует отметить, что в зависимости от конкретного исполнения запорных устройств полости управления закрытием (как таковые) в их конструкции могут отсутствовать (например, при использовании для закрытия проходного сечения запорного устройства пружины).
Вследствие вышеуказанных соединений при перемещении золотника направляющего гидрораспределителя из одной крайней рабочей позиции в другую двухлинеиные двухпозиционные запорные устройства, управляемые посредством этого гидрораспределителя, изменяют свое состояние попарно в противофазе, а именно: если проходное сечение запорного устройства, соединяющего одну из выходных полостей мультипликатора с силовой гидролинией, открыто, то проходное сечение запорного устройства, которое соединяет эту выходную полость с напорным гидробаком, закрыто, в то же время проходное сечение запорного устройства, соединяющего другую из выходных полостей мультипликатора с силовой гидролинией, наоборот, закрыто, а проходное сечение запорного устройства, которое соединяет данную выходную полость с напорным гидробаком, открыто. Когда поршень мультипликатора приближается к своему крайнему положению, то на основании сигнала, поступающего па вход электронного блока управления (контроллера) с датчика перемещения поршня этого мультипликатора, с выхода электронного блока управления (контроллера) на электрический вход четырехлинеиного направляющего гидрораспределителя подается сигнал, в соответствии с которым состояние этих запорных устройств меняется на противоположное, а на электрический вход соответствующего четырехлинеиного трехпозиционного дросселирующего гидрораспределителя при прочих равных условиях подается сигнал противоположного знака. В результате этого с силовой гидролинией пульсаторного гидропривода оказывается соединенной другая выходная полость мультипликатора, а направление движения поршня мультипликатора изменяется на противоположное, что позволяет продолжить процесс изменения объема рабочей жидкости в полости рабочего хода соответствующею главного гидроцилиндра.
Таким образом, благодаря наличию у мультипликатора двух выходных полостей, используемых по очереди для изменения объема рабочей жидкости в пульсаторном гидроприводе, указанное изменение объема непосредственно в процессе ковки возможно на любую величину в практически необходимых при работе радиально-ковочной машины пределах.
Это дает возможность производить корректировку ковочного размера в необходимых при работе радиально-ковочной машины пределах и в результате позволяет непосредственно в процессе ковки осуществлять изменение ковочного размера и благодаря этому ковать заготовки переменного профиля.
Двухлинейные двухпозиционные устройства по конструкции запорно-регулирующего элемента являются устройствами клапанного (седельного) типа, в силу чего обладают высокой герметичностью и их введение в систему не приводит к увеличению утечек из пульсаторного гидропривода, что предопределяет повышенный коэффициент полезного действия предлагаемой системы компенсации погрешности обеспечения ковочного размера.
Выполнение двухлинейных двухнозиционных запорных устройств в виде двух встречно гидравлически соединенных односторонних гидрозамков, представляющих собой серийно выпускаемые гидроаппараты, ускоряет и удешевляет процесс комплектации и изготовления системы.
Соединение каждой из двух выходных полостей мультипликатора с напорным гидробаком через предохранительный клапан с обратным клапаном с усиленной пружиной необходимо для ограничения величины максимального давления в выходных полостях мультипликатора и для исключения нарушения в них сплошности рабочей жидкости, что способствует повышению надежности работы системы.
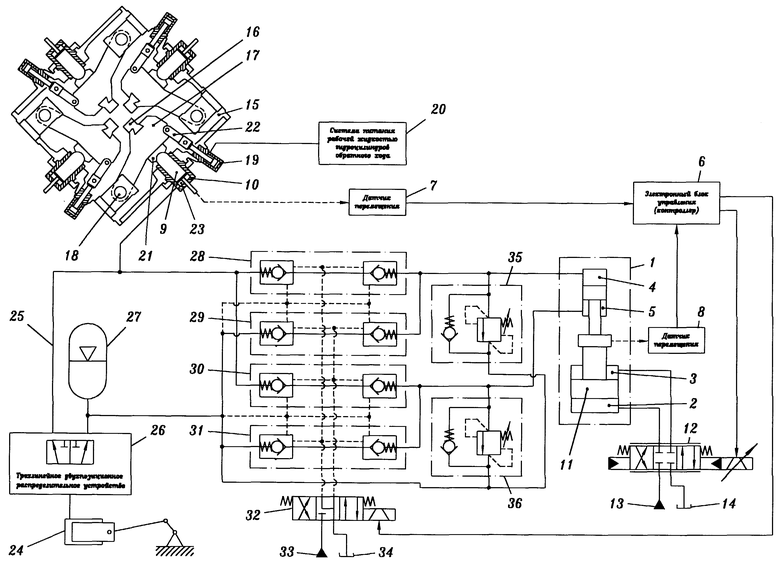
Сущность изобретения поясняется чертежом, на котором изображена схема системы компенсации погрешности обеспечения ковочного размера радиально-ковочной машины.
На чертеже для наглядности дополнительно приведено схематическое изображение четырехбойковой радиально-ковочной машины (в общем случае количество бойков может быть иным). Элементы системы компенсации на схеме показаны только для пульсаторного гидропривода одного бойка, поскольку для пульсаторных гидроприводов других бойков исполнение системы является полностью идентичным.
Система компенсации погрешности обеспечения ковочного размера радиально-ковочной машины содержит в своем составе мультипликаторы 1 (по одному для пульсаторного гидропривода каждого бойка) с двумя входными полостями 2, 3 и двумя выходными полостями 4, 5 и электронный блок управления (контроллер) 6, входы которого соединены с выходами датчиков 7, 8 перемещения выходных звеньев (плунжеров) 9 главных гидроцилиндров 10 радиально-ковочной машины и поршней 11 мультипликаторов 1, а выходы соединены с электрическими входами четырехлинейных трехпозиционных дросселирующих гидрораспределителей 12 с электрическим управлением, исполнительные каналы каждого из которых соединены с входными полостями 2, 3 соответствующего мультипликатора 1, напорный канал соединен с гидравлическим источником питания 13, а сливной канал - со сливом 14. При нулевом электрическом сигнале на электрическом входе гидрораспределителя 12 все каналы последнего перекрыты. При ненулевом электрическом сигнале на электрическом входе гидрораспределителя 12 один из его исполнительных каналов соединен с напорным каналом гидрораспределителя, а другой - со сливным, или наоборот (в зависимости от знака управляющего сигнала).
Электронный блок управления (контроллер) 6 соединен также с пультом управления (панелью оператора) радиально-ковочной машины, в состав которого, в частности, входит устройство задания ковочного размера (на чертеже пульт управления не показан).
Главные гидроцилиндры 10 жестко закреплены на станине 15 радиально-ковочной машины и предназначены для сведения бойков 16 и создания усилия деформации заготовки (поковки). В показанной на чертеже схеме радиально-ковочной машины бойки 16 закреплены на рычагах 17, установленных на станине 15 с возможностью поворота относительно осей 18. Для разведения бойков 16 служат гидроцилиндры обратного хода 19, рабочие полости (полости обратного хода) которых соединены с системой 20 питания их рабочей жидкостью. Выходное звено (плунжер 9 главного гидроцилиндра 10 взаимодействует с рычагом 17 через гидростатическую опору 21. Шток гидроцилиндра обратного хода 19 связан с рычагом 17 через тягу 22.
Полость 23 рабочего хода каждого из главных гидроцилиндров 10 соединена с рабочей камерой соответствующего насоса-пульсатора 24 силовой гидролинией 25, в которой установлено трехлинейное двухпозиционное распределительное устройство 26, третий канал которого соединен с напорным гидробаком 27, давление в котором поддерживается большим атмосферного. Посредством распределительного устройства 26 рабочая камера насоса-пульсатора 24 сообщается с напорным гидробаком 27 или с полостью 23 рабочего хода главного гидроцилиндра 10. Трехлинейное двухпозиционное распределительное устройство 26 имеет электрическое управление, и его электрический вход соединен с соответствующим выходом электронного блока управления (контроллера) 6 (на чертеже указанное соединение не показано).
Выходная полость 4 мультипликатора 1 посредством двухлинейных двухпозиционных запорных устройств 28, 29 соединена соответственно с силовой гидролинией 25 (на участке между ее присоединениями к распределительному устройству 26 и к главному гидроцилиндру 10) и с напорным гидробаком 27. Выходная полость 5 мультипликатора 1 посредством двухлинейных двухпозиционных запорных устройств 30, 31 также соединена соответственно с силовой гидролинией 25 (в том же месте) и с напорным гидробаком 27.
Полости управления двухлинейных двухпозиционных запорных устройств 28, 29, 30, 31, относящихся к каждому из мультипликаторов 1, соединены с исполнительными каналами соответствующего четырехлинейного направляющего гидрораспределителя 32 с электрическим управлением, электрический вход которого соединен с дополнительным выходом электронного блока управления (контроллера) 6, напорный канал - с гидравлическим источником питания 33, а сливной канал - со сливом 34. При наличии управляющего электрического сигнала на электрическом входе гидрораспределителя 32 один из его исполнительных каналов соединен с напорным каналом гидрораспределителя, а другой - со сливным, или наоборот (в зависимости от характера управляющего сигнала). Гидрораспределитель 32 может быть выполнен двухпозиционным без пружинного возврата золотника и с фиксацией последнего в рабочих положениях (на чертеже такой вариант исполнения гидрораспределителя 32 не показан).
На чертеже показан вариант исполнения системы компенсации, в соответствии с которым каждое из двухлинейных двухпозиционных запорных устройств 28, 29, 30, 31 выполнено в виде двух встречно (каналами со стороны седел запорно-регулирующих элементов) гидравлически соединенных односторонних гидрозамков разгруженного типа. При этом полости управления гидрозамков, входящих в состав запорных устройств 28 и 31, соединены между собой и с одним из исполнительных каналов гидрораспределителя 32, а полости управления гидрозамков, входящих в состав запорных устройств 29 и 30, соединены между собой и с другим из исполнительных каналов гидрораспределителя 32. Дренажные полости всех гидрозамков, входящих в состав запорных устройств 28, 29, 30, 31, соединены между собой и с напорным гидробаком 27.
В рассматриваемом случае гидрораспределитель 32 выполнен трехпозиционном с пружинным возвратом золотника в нейтральную позицию, и при отсутствии управляющего электрического сигнала на электрическом входе гидрораспределителя (и, соответственно, нейтральной позиции его золотника) исполнительные каналы данного гидрораспределителя соединены между собой и со сливным каналом.
Выходные полости 4 и 5 мультипликатора 1 соединены с напорным гидробаком 27 через предохранительно-обратные клапаны соответственно 35 и 36. При этом со стороны входа предохранительного клапана клапаны 35 и 36 присоединены к соответствующей выходной полости мультипликатора, а со стороны входа обратного клапана - к напорному гидробаку 27. Пружина обратного клапана клапанов 35, 36 выполнена усиленной из условия обеспечения открытия проходного сечения обратного клапана при перепаде давления, составляющем величину, приблизительно равную номинальному избыточному давлению в напорном гидробаке 27.
Система компенсации погрешности обеспечения ковочного размера радиально-ковочной машины работает следующим образом.
При работе радиально-ковочной машины в штатных режимах с выхода электронного блока управления (контроллера) 6 на электрический вход направляющего гидрораспределителя 32 постоянно подается управляющий электрический сигнал, вследствие чего золотник гидрораспределителя занимает ту или иную из крайних рабочих позиций (в зависимости от характера управляющего сигнала). Пусть, например, в текущий момент времени характер упомянутого управляющего сигнала таков, что золотник гидрораспределителя 32 занимает свое крайнее рабочее положение, при котором полости управления гидрозамков, входящих в состав запорных устройств 28 и 31, соединяются с гидравлическим источником питания 33, а полости управления гидрозамков, входящих в состав запорных устройств 29 и 30, соединяются со сливом 34. В результате этого проходные сечения запорных устройств 28 и 31 оказываются открытыми, а проходные сечения запорных устройств 29 и 30 - закрытыми, и, соответственно, выходная полость 4 мультипликатора 1 сообщается с силовой гидролинией 25 пульсаторного гидропривода, а выходная полость 5 мультипликатора 1 сообщается с напорным гидробаком 27.
При условии, что в передней мертвой точке выходное звено (плунжер) 9 главного гидроцилиндра 10 занимает положение, соответствующее заданному значению ковочного размера, на основании сигнала, поступающего с датчика перемещения 7 указанного звена, с соответствующего выхода электронного блока управления (контроллера) 6 на электрический вход дросселирующего гидрораспределителя 12 подается нулевой управляющий сигнал. В этом случае золотник дросселирующего гидрораспределителя 12 занимает нейтральную позицию, при котором все каналы данного гидрораспределителя перекрыты, вследствие чего входные полости 2, 3 мультипликатора 1 оказываются запертыми и его поршень 11 не изменяет своего положения. В итоге посредством системы компенсации погрешности обеспечения ковочного размера никакого изменения количества жидкости (которого в данном случае и не требуется) в пульсаторном гидроприводе, образованном насосом-пульсатором 24 и главным гидроцилиндром 10, не происходит.
При недокове или перекове, что фиксируется с помощью датчика 7 перемещения выходного звена (плунжера) 9 главного гидроцилиндра 10, в соответствии с величиной недокова или перекова в электронном блоке управления (контроллере) 6 производится вычисление значения изменения координаты поршня 11 мультипликатора 1, которое необходимо для подачи в полость 23 рабочего хода главного гидроцилиндра 10 или отбора из этой полости объема жидкости, обеспечивающего при прочих равных условиях достижение ковки точно с заданным размером на следующем цикле работы машины. Далее сразу после прохода выходными звеньями (плунжерами) 9 главных гидроцилиндров 10 передней мертвой точки с выхода электронного блока управления (контроллера) 6 на электрический вход соответствующего дросселирующего гидрораспределителя 12 поступает управляющий сигнал, пропорциональный величине разности между координатой поршня 11 мультипликатора 1, соответствующей положению, в которое он должен переместиться для компенсации погрешности обеспечения ковочного размера, и текущей координатой поршня 11 мультипликатора 1, фиксируемой с помощью датчика 8 его перемещения. В рассматриваемом случае, если на предыдущем цикле работы машины был недоков, то на электрический вход дросселирующего гидрораспределителя 12 поступает управляющий сигнал, в результате отработки которого входная полость 2 мультипликатора 1 соединяется с гидравлическим источником питания 13, а входная полость 3 мультипликатора 1 соединяется со сливом 14. Поршень 11 мультипликатора 1 приходит в движение в направлении уменьшения объема его выходной полости 4, рабочая жидкость из которой вытесняется в силовую гидролинию 25 через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 28, что приводит к смещению задней мертвой точки выходного звена (плунжера) 9 главного гидроцилиндра 10 в направлении межбойкового пространства и к устранению недокова. Объем выходной полости 5 мультипликатора 1 при этом увеличивается и через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 31, в нее поступает рабочая жидкость из напорного гидробака 27. Если на предыдущем цикле работы машины был переков, то на электрический вход дросселирующего гидрораспределителя 12 поступает управляющий сигнал, в результате отработки которого входная полость 3 мультипликатора 1 соединяется с гидравлическим источником питания 13, а входная полость 2 мультипликатора 1 соединяется со сливом 14. Поршень 11 мультипликатора 1 приходит в движение в направлении увеличения объема его выходной полости 4, в которую из силовой гидролинии 25 через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 28, поступает рабочая жидкость, что приводит к смещению задней мертвой точки выходного звена (плунжера) 9 главного гидроцилиндра 10 в направлении от межбойкового пространства и, соответственно, ведет к устранению перекова. Объем выходной полости 5 мультипликатора 1 при этом уменьшается и через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 31, рабочая жидкость из нее вытесняется в напорный гидробак 27. После перемещения поршня 11 мультипликатора 1 в то положение, которое в результате вычислений было определено как необходимое для компенсации установленной погрешности обеспечения ковочного размера, управляющий сигнал на электрическом входе дросселирующего гидрораспределителя 12 принимает нулевое значение и поршень 11 мультипликатора 1 останавливается.
Следует отметить, что в процессе ковки из-за утечек рабочей жидкости из пульсаторного гидропривода посредством системы компенсации погрешности обеспечения ковочного размера преимущественно производится компенсация недокова.
При приближении поршня 11 мультипликатора 1 на заранее заданную величину к любому из своих крайних положений, что контролируется посредством датчика перемещения 8, электрический сигнал, поступающий с соответствующего выхода электронного блока управления (контроллера) 6 на электрический вход направляющего гидрораспределителя 32 автоматически изменяется на противоположный. Вследствие этого в рассматриваемом случае золотник гидрораспределителя 32 занимает свое второе крайнее рабочее положение, при котором полости управления гидрозамков, входящих в состав запорных устройств 29 и 30, соединяются с гидравлическим источником питания 33, а полости управления гидрозамков, входящих в состав запорных устройств 28 и 31, соединяются со сливом 34. В результате этого проходные сечения запорных устройств 29 и 30. оказываются открытыми, а проходные сечения запорных устройств 28 и 31 - закрытыми, и соответственно, выходная полость 4 мультипликатора 1 сообщается с напорным гидробаком 27, а выходная полость 5 мультипликатора 1 сообщается с силовой гидролинией 25 пульсаторного гидропривода. При указанном характере управляющего сигнала на электрическом входе направляющего гидрораспределителя 32 на электрический вход дросселирующего гидрораспределителя 12 с соответствующего выхода электронного блока управления (контроллера) 6 при прочих равных условиях подается сигнал противоположного знака по сравнению с вышеописанным алгоритмом. Так, если на предыдущем цикле работы машины был недоков, то на электрический вход дросселирующего гидрораспределителя 12 поступает управляющий сигнал, в результате отработки которого входная полость 3 мультипликатора 1 соединяется с гидравлическим источником питания 13, а входная полость 2 мультипликатора 1 соединяется со сливом 14. Поршень 11 мультипликатора приходит в движение в направлении уменьшения объема его выходной полости 5, рабочая жидкость из которой вытесняется в силовую гидролинию 25 через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 30, что приводит к смещению задней мертвой точки выходного звена (плунжера) 9 главного гидроцилиндра 10 в направлении межбойкового пространства и к устранению недокова. Объем выходной полости 4 мультипликатора 1 при этом увеличивается и через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 29, в нее поступает рабочая жидкость из напорного гидробака 27. Если на предыдущем цикле работы машины был переков, то на электрический вход дросселирующего гидрораспределителя 12 поступает управляющий сигнал, в результате отработки которого входная полость 2 мультипликатора 1 соединяется с гидравлическим источником питания 13, а входная полость 3 мультипликатора 1 соединяется со сливом 14. Поршень 11 мультипликатора 1 приходит в движение в направлении увеличения объема его выходной полости 5, в которую из силовой гидролинии 25 через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 30, поступает рабочая жидкость, что приводит к смещению задней мертвой точки выходного звена (плунжера) 9 главного гидроцилиндра 10 в направлении от межбойкового пространства и, соответственно, ведет к устранению перекова. Объем выходной полости 4 мультипликатора 1 при этом уменьшается и через открытые проходные сечения гидрозамков, входящих в состав запорного устройства 29, рабочая жидкость из нее вытесняется в напорный гидробак 27.
При приближении поршня 11 мультипликатора 1 вновь на заранее заданную величину к любому из своих крайних положений, что контролируется посредством датчика перемещения 8, электрический сигнал, поступающий с соответствующего выхода электронного блока управления (контроллера) 6 на электрический вход направляющего гидрораспределителя 32 обратно автоматически изменяется на противоположный и вышеописанные процессы повторяются.
Таким образом, обе выходные полости 4, 5 мультипликатора 1 по очереди (без ограничения количества циклов) используются для изменения объема рабочей жидкости в пульсаторном гидроприводе, благодаря чему указанное изменение объема непосредственно в процессе ковки возможно на любую величину в практически необходимых при работе радиально-ковочной машины пределах.
Очевидно, что работа системы компенсации погрешности обеспечения ковочного размера в случае задания непосредственно в ходе ковки нового значения ковочного размера протекает аналогичным образом: при задании меньшего значения ковочного размера он достигается как процесс устранения недокова, а при задании большего значения ковочного размера он достигается как процесс устранения перекова.
Процесс ковки протекает при разобщении посредством трехлинейного двухпозиционного распределительного устройства 26 рабочей камеры насоса-пульсатора 24 с напорным гидробаком 27 и сообщении ее с полостью рабочего хода 23 главного гидроцилиндра 10.
При разобщении посредством распределительного устройства 26 рабочей камеры насоса-пульсатора 24 с полостью рабочего хода 23 главного гидроцилиндра 10 и сообщении ее с напорным гидробаком 27 рабочая жидкость из рабочей камеры работающего насоса-пульсатора 24 перетекает в напорный гидробак 27 и обратно. В рассматриваемой ситуации бойки 16 машины находятся в состоянии остановки, что целесообразно в паузы между ковками для исключения непроизводительных затрат энергии и снижения износа элементов привода бойков 16, а также может использоваться для контроля состояния бойков 16 при работающей машине.
Следует отметить, что при наличии соответствующего сигнала переключение трехлинейного двухпозиционного распределительного устройства 26 производится в момент времени, когда плунжер насоса-пульсатора 24 проходит свою заднюю мертвую точку. Соответственно, остановка бойков 16 происходит в их задней мертвой точке (то есть при разведенных бойках). С помощью предлагаемой системы компенсации погрешности обеспечения ковочного размера путем подачи дополнительного объема рабочей жидкости в силовую гидролинию 25 (и тем самым в полость рабочего хода 23 главного гидроцилиндра 10) или отбора жидкости из этой гидролинии (а в конечном итоге из полости рабочего хода 23 главного гидроцилиндра 10) положение задней мертвой точки выходного звена (плунжера) 9 главного гидроцилиндра 10 (а значит и соответствующего бойка 16) и следовательно, установка ковочного размера могут быть изменены, а именно: при подаче дополнительного объема жидкости ковочный размер уменьшается, при отборе жидкости ковочный размер увеличивается.
При отсутствии управляющего электрического сигнала на электрическом входе направляющего гидрораспределителя 32 (и, соответственно, нейтральной позиции его золотника) полости управления всех гидрозамков, входящих в состав запорных устройств 28, 29, 30 и 31, оказываются соединенными со сливом 34, вследствие чего проходные сечения запорных устройств 28, 29, 30 и 31 оказываются закрытыми и обе выходные полости 4,5 мультипликатора 1 оказываются изолированными от силовой гидролинии 25 пульсаторного гидропривода. Такое состояние системы компенсации может быть полезно при выявлении мест утечек рабочей жидкости как непосредственно в этой системе, так и в пульсаторном гидроприводе радиально-ковочной машины.
Предохранительно-обратные клапаны 35 и 36, с одной стороны, ограничивают величину максимального давления в выходных полостях соответственно 4, 5 мультипликатора 1 на предельно допустимом уровне, а с другой стороны, исключают нарушение в указанных полостях сплошности рабочей жидкости, что способствует повышению надежности работы системы. Благодаря использованию усиленных пружин в составе обратных клапанов предохранительно-обратных клапанов 35, 36 проходные сечения указанных обратных клапанов на штатных режимах работы радиально-ковочной машины являются закрытыми и обратные клапаны не оказывают влияния на работу системы компенсации. Но в ситуации, когда, например, управляющий электрический сигнал на электрическом входе направляющего гидрораспределителя 32 отсутствует (и соответственно, проходные сечения запорных устройств 28, 29, 30 и 31 закрыты), а золотник дросселирующего гидрораспределителя 12 смещен из его нейтральной позиции и, соответственно, поршень 11 мультипликатора 1 перемещается, проходное сечение того из обратных клапанов, входящих в состав клапанов 35, 36, который соединен с выходной полостью (4 или 5) мультипликатора 1, где давление снизилось до уровня атмосферного, открывается, что обеспечивает заполнение указанной полости рабочей жидкостью из напорного гидробака 27. Из другой выходной полости (5 или 4) мультипликатора 1 рабочая жидкость при этом под максимальным давлением через второй из предохранительно-обратных клапанов (36 или 35), работающий в данном случае как клапан разности давлений, вытесняется в напорный гидробак 27.
Таким образом, как следует из вышеизложенного, предлагаемое изобретение обеспечивает возможность изменения объема рабочей жидкости в полости рабочего хода главного гидроцилиндра (исчисляемого для состояния, когда выходное звено гидроцилиндра находится в задней мертвой точке) с высокой точностью па любую величину в практически необходимых при работе радиально-ковочной машины пределах при минимальных утечках рабочей жидкости из рабочей полости и тем самым приводит к повышению точности работы и коэффициента полезного действия системы компенсации погрешности обеспечения ковочного размера радиально-ковочной машины, а в конечном итоге - к повышению точности ковки.
Литература
1. Радиально-ковочная машина: Авторское свидетельство СССР № 508319. МКИ В 21 J 7/16. Заявлено 09.04.1973. Опубликовано 30.03.1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПУЛЬСАТОРНЫМ ГИДРОПРИВОДОМ РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ И РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 2002 |
|
RU2230622C1 |
| ПУЛЬСАТОРНЫЙ ГИДРОПРИВОД РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241565C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНОЙ ТРАВЕРСОЙ ГИДРАВЛИЧЕСКОГО ПРЕССА | 2021 |
|
RU2764536C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 2003 |
|
RU2250828C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ГИДРОПРИВОД ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2530917C1 |
Изобретение относится к области кузнечно-прессового производства, а именно к системам компенсации погрешности обеспечения ковочного размера радиально-ковочных машин с пульсаторным гидроприводом бойков. Система содержит мультипликаторы, датчики перемещения выходных звеньев главных гидроцилиндров и поршней мультипликаторов, четырехлинейные трехпозиционные дросселирующие гидрораспределители с электрическим управлением, четырехлинейные направляющие гидрораспределители с электрическим управлением и электронный блок управления. Входы блока соединены с выходами датчиков перемещения, а выходы - с электрическими входами четырехлинейных трехпозиционных гидрораспределителей. Исполнительные каналы каждого из упомянутых гидрораспеределителей соединены с входными полостями соответствующего мультипликатора, напорный канал - с гидравлическим источником питания, а сливной канал - со сливом. Каждая из двух выходных полостей мультипликаторов соединена с силовой гидролинией между полостью рабочего хода главного гидроцилиндра радиально-ковочной машины и рабочей камерой соответствующего насоса-пульсатора и с напорным гидробаком через двухлинейные двухпозиционные запорные устройства. В результате обеспечивается повышение точности работы и коэффициента полезного действия. 3 з.п. ф-лы, 1 ил.
| Радиально-ковочная машина | 1973 |
|
SU508319A1 |
| Устройство для корректировки положения инструмента радиальнообжимной машины | 1978 |
|
SU706172A1 |
| Устройство для контроля и управления бойками радиально-ковочной машины | 1985 |
|
SU1276414A1 |
| Устройство для контроля работы радиально-ковочной машины | 1986 |
|
SU1323194A1 |
| ЦЕНТРОБЕЖНЫЙ ЭЛЕКТРОНАГНЕТАТЕЛЬ | 1999 |
|
RU2172431C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОКСИМАЛЬНОЙ ГРАНИЦЫ ОПУХОЛИ ПИЩЕВОДА | 2005 |
|
RU2321352C2 |

