Изобретение относится к нанотехнологии, а более конкретно, к устройствам, обеспечивающим перемещения образца по трем координатам (X, Y, Z). Например, устройство может быть использовано для перемещения образцов, держателей образцов и других элементов в сканирующей зондовой микроскопии.
Известен координатный стол, состоящий из основания, каретки и направляющих с роликами, расположенных вдоль координат X, Y [1].
Первый недостаток указанного устройства заключается в невозможности быстрого снятия каретки с платформы, что затрудняет замену образца. Второй недостаток связан со сложностью конструкции направляющих с роликами, что не позволяет создать компактное устройство. Третьим недостатком является отсутствие возможности перемещения каретки по третьей координате Z. Четвертый недостаток заключается в невозможности точного повторения установки каретки.
Известен координатный стол, где платформа и каретка выполнены в виде одной детали, а направляющими по координатам Х и Y являются тонкие перемычки в виде плоских пружин [2].
Недостатками указанного устройства являются невозможность снятия каретки с платформы, малый ход координатного стола и отсутствие возможности перемещения каретки по третьей координате Z.
Известен также координатный стол, содержащий платформу, на которой посредством четырех плоских пружин закреплена первая каретка с возможностью перемещения по первой координате X. Внутри первой каретки, также с помощью четырех плоских пружин, закреплена вторая каретка с возможностью перемещения по второй координате Y, перпендикулярной координате X. Первая и вторая каретки расположены с возможностью взаимодействия с первым и вторым пьезоприводами, закрепленными на платформе координатного стола. Положения кареток зафиксированы первым и вторым пружинными упорами, также закрепленными на платформе [3].
Первым недостатком указанного устройства является малый ход кареток координатного стола, связанный с использованием пьезоприводов. Второй недостаток заключается в невозможности снятия кареток, например, для замены образца, что бывает необходимым при использовании координатного стола в сложных технологических устройствах, например, в сканирующих зондовых микроскопах (СЗМ). Третий недостаток состоит в отсутствии возможности перемещения каретки по третьей координате Z. Четвертый недостаток связан с невозможностью разворота второй каретки.
Указанное устройство выбрано в качестве прототипа предложенного решения.
Задачей изобретения является создание устройства подвижки образца, позволяющего использовать его, например, в сканирующей зондовой микроскопии для перемещения образцов в широком диапазоне по трем координатам с возможностью быстрой замены образцов при жестком креплении их к каретке и прецизионной повторяемости позиции каретки с образцом при ее установке.
Технический результат изобретения заключается в расширении функциональных возможностей предложенного устройства.
Указанный технический результат достигается тем, что в устройство подвижки образца, содержащее корпус, на котором посредством первых направляющих установлена первая каретка со вторыми направляющими, закреплены первый и второй пьезоприводы, сопряженные с первой кареткой, и вторую каретку с держателем образца, установленную посредством вторых направляющих на первой каретке, введены третий или третий и четвертый пьезоприводы, закрепленные на корпусе и сопряженные с первой кареткой, при этом первый, второй, третий и четвертый пьезоприводы выполнены в виде секционированных: пьезотрубок, продольные оси которых расположены в одной плоскости под углами друг к другу соответственно 120° и 90°, первыми концами сопряженных с корпусом, а вторыми концами - с первой кареткой посредством шарниров и представляющих собой первые направляющие, при этом вторая каретка установлена на первой каретке с возможностью съема с нее.
Возможен вариант, в котором пьезоприводы закреплены на корпусе с помощью первых бобышек с выборками.
Существует также вариант, в котором каждый шарнир выполнен в виде соединенных винтом второй бобышки и гайки с обнижением по оси, изготовленной из пружинного материала и имеющей осевую жесткость меньше фрагмента винта, расположенного в обнижении между бобышкой и гайкой.
На фиг.1 и 2 изображены виды устройства подвижки образца сверху и сбоку.
На фиг.3 и 4 изображены варианты выполнения пьезоприводов.
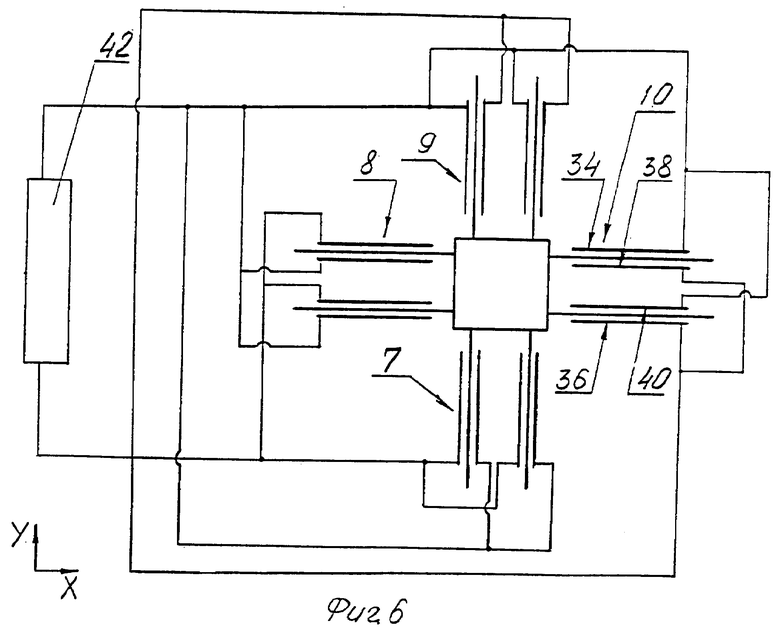
На фиг.5 и 6 - варианты подключения пьезоприводов к блоку питания.
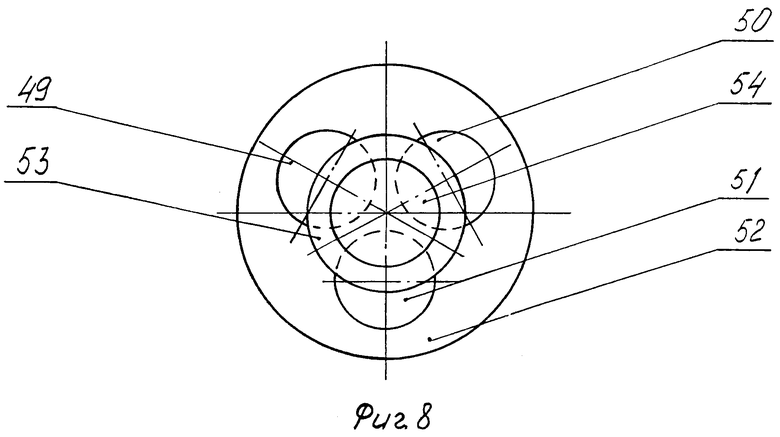
На фиг.7 и 8 - возможные варианты выполнения устройства.
На фиг.9 - вариант использования устройства в сканирующем зондовом микроскопе.
Один из вариантов устройства подвижки образца содержит корпус 1 (фиг.1, фиг.2), на котором посредством винтов 2 с осевыми отверстиями и первых бобышек 3 с выборками 4 установлены, например, с использованием клеевых швов 5, первыми концами 6, пьезоприводы 7, 8, 9 и 10, в качестве которых использованы секционированные пьезотрубки (см., например [4, 5, 6, 7, 8]). При этом продольные оси пьезотрубок расположены в одной плоскости под углом 90° друг к другу. Вторые концы 11 этих пьезоприводов сопряжены с первой кареткой 12 с использованием вторых бобышек 13 с винтами 14, которые посредством шаровых поверхностей 15 взаимодействуют с конусными упорами 16, выполненными в первой каретке 12. Винты 14 сопряжены с гайками 17, имеющими обнижения 18. Совокупность элементов 14, 15, 16 и 17 выполняет функцию шарнира. В простейшем случае роль шарнира может выполнять клеевой шов (не показан) между бобышкой 13 и пьезотрубкой. Бобышки 13 на пьезоприводах 7, 8, 9 и 10 могут быть установлены на скользящей посадке без применения клея. Следует заметить, что возможен вариант установки пьезоприводов 7, 8, 9 и 10 на корпусе 1 без применения бобышек 3, а путем непосредственного вклеивания в корпус 1. Пьезоприводы 7, 8, 9 и 10 в обоих случаях одновременно с функцией перемещения выполняют роль первых направляющих первой каретки 12. Первая каретка 12 содержит установленный на винте 19 с возможностью осевой подвижки ферромагнитный элемент 20, выполненный, например, из никеля. На первой каретке 12 закреплен фланец 21 со вторыми направляющими в виде регулируемых опор 22, на которых посредством установочных элементов 23 размещена вторая каретка 24 с магнитом 25 с возможностью съема с первой каретки 12. В качестве установочных элементов 23 могут быть использованы три V-образные опоры, расположенные под углами 120° своими ребрами друг к другу. Возможен также вариант параллельной установки трех V-образных опор либо использование двух, параллельно установленных V-образных опор и одной плоской, либо использование трех плоских опор. В отдельных случаях возможен вариант использования одной V-образной, одной конусообразной и одной плоской опоры (не показано).
На второй каретке 24, например, посредством клея или прижимных планок (не показаны) закрепляют держатель образца или непосредственно образец 26. На корпусе 1 установлен разъем (разъемы) 27 и два защитных кожуха 28 и 29.
Пьезоприводы 7, 8, 9 и 10, выполненные в виде секционированных пьезотрубок, могут содержать два внешних 30, 31 (фиг.3) и два внутренних 32 и 33 электрода. Возможен также вариант, в котором каждая пьезотрубка содержит четыре внешних 34, 35, 36, 37 и четыре внутренних 38, 39, 40 и 41 электрода. В одном из вариантов подключения электроды 30, 31, 32 и 33, например пьезопривода, 10 перекрестно подключены к блоку управления 41, как показано на фиг.5. Аналогично подключены электроды пьезоприводов 7, 8, и 9.
В этом случае устройство работает следующим образом. На пары электродов 30, 33 и 31, 32 подают постоянное напряжение, пьезотрубки пьезоприводов 7, 8, 9 и 10 синхронно изгибаются по часовой или против часовой стрелке и осуществляют разворот кареток 12 и 24 с образцом 26 в плоскости первой координаты Х и второй Y в ту или иную сторону. Механизм изгиба пьезотрубок см. в [6, 7].
Существуют также другие варианты использования электродов. В случае перекрестного подключения электродов пьезоприводов 7, 8, 9 и 10 (как показано на фиг.5), но только с возможностью изгиба трубок по третьей координате Z (при этом пьезоприводы повернуты на 90° вокруг оси), возможно перемещение образца 26 по координате Z. Если же на каждый пьезопривод подают разные напряжения, возможно осуществление качания плоскости образца 26.
Возможно также перекрестное подключение электродов (каждый наружный соединяют с противолежащим внутренним) пьезопривода, изображенного на фиг.4, таким образом, что при подаче соответствующих напряжений он одновременно будет изгибаться в плоскости координат X, Y и по координате Z. Подключение пьезопривода по фиг.4 в объеме четырех электродов 34, 40 и 36, 38 изображено на фиг.6. Остальные электроды 37, 39 и 35, 41 подключены аналогично. В этом случае можно как вращать образец в плоскости координат X, Y, так и качать его плоскость.
Кроме этого, существует вариант, в котором объединяют внутренние электроды 38, 39, 40, 41 и наружные электроды 34, 35, 36, 37. В этом случае при подаче на них напряжений возможно осуществление противофазного растяжения и сжатия приводов 8 и 10 (аналог работы пьезопривода со сплошным наружным и внутренним электродами). При этом в случае расположения трех V-образных опор 23 параллельно координате Х возможно инерционное перемещение каретки 24 по этой координате (подробно принцип инерционного перемещения см. в [9, 10]). Следует также заметить, что в этом случае можно пьезоприводы 7 и 9 включить в режим синхронного изгиба в сторону растяжений и сжатий приводов 8 и 10. Это будет способствовать увеличению шага инерционного перемещения. Подачей напряжений на электроды могут управлять электронные ключи.
В отдельных случаях, когда требования к точности перемещения каретки 24 невысоки, в качестве установочных элементов 23 можно использовать плоские пластины. В этом случае перемещение каретки 24 может осуществляться также по координате X. Для этого дополнительно приводы 7 и 9 включают на противофазное сжатие - растяжение, а приводы 8 и 10 - на синхронный изгиб.
Сборку устройства производят следующим образом. Устанавливают бобышки 3 с пьезоприводами 7, 8, 9, 10 и шарнирами на корпус 1. Устанавливают каретку 12 между винтами 14. Используя осевые отверстия винтов 2, создают предварительный натяг первой каретки 12 винтами 14. Изгибают пьезоприводы 7 и 9 по оси Х в положительном направлении. Пьезоприводы 8 и 10 при этом соответственно растягивают и сжимают. После этого осуществляют дополнительный натяг первой каретки 12 винтами 14 и фиксируют их гайками 17 с их прижимным изгибом по оси (гайки 17 при этом, за счет обнижений 18, работают как плоские мембраны).
Упругость фрагментов 14 подбирают таким образом, чтобы она превышала упругость гаек в 5-10 раз.
Величина изгибного перемещения пьезоприводов составляет величину порядка 10-20 мкм, осевое же их перемещение при этом будет в пределах 0,1-0,2 мкм.
После этого фиксируют бобышки 3 винтами 2, осуществляя их небольшую (0,1-0,5 мкм) деформацию.
Следует заметить, что возможен вариант использования трех секционированных пьезотрубок 43, 44 и 45 (фиг.7), закрепленных на корпусе 46 и сопряженных с первой кареткой 47 и второй кареткой 48. При этом их продольные оси расположены в одной плоскости под углом 120° друг к другу. Более подробно устройство не показано.
Существует также вариант, в котором три секционированных пьезотрубки 49, 50 и 51 (фиг.8) установлены на корпусе 52 под углом 120° друг к другу и сопряжены с первой кареткой 53 и второй кареткой 54. При этом их продольные оси параллельны.
Возможен также вариант, в котором вместо пьезотрубок можно использовать пьезоприводы другого конструктивного исполнения [11].
При использовании устройства 55 в СЗМ 56 (фиг.9) его устанавливают на платформу 57, осуществляют сближение блока анализа 58 с образцом 26. После контакта зонда 59 с образцом 26 производят сканирования образца, используя пьезосканер 60 (см. подробно [4, 5, 6, 7]). В случае последовательных съемов и установок второй каретки 24 на первую каретку 12 и при расположении V-образных опор (установочных элементов 23) под 120° друг к другу ее положение сохраняется. В предложенном устройстве погрешность установки каретки 24 находится в пределах 1 мкм, что заведомо перекрывается диапазоном подвижек пьезоприводов.
Описанные режимы использования устройства подвижки образца 26 можно применять в нанолитографических системах, где необходимо совмещать рисунки топологий на образце на различных стадиях их формирования.
После инерционного перемещения образца 26 к очередному модулю может возникнуть необходимость доворота образца относительно системы координат поля сканирования зонда 59, которое осуществляют за счет изгибов пьезоприводов (описано выше).
Введение, по меньшей мере, одного третьего пьезопривода, закрепленного на корпусе и сопряженного с первой кареткой шарнирно, а также выполнение приводов в виде секционных пьезотрубок позволяет корректировать положение образца в пространстве, что расширяет функциональные возможности устройства. Это особенно актуально в нанотехнологии при использовании многозондовых линеек или матриц для компенсации нефункционального разворота матрицы зондов относительно образца.
Кроме этого, предложенное устройство позволяет осуществлять инерционную подвижку образца относительно зонда в широком диапазоне.
Закрепление пьезоприводов на корпусе с использованием первых бобышек с выборками позволяет за счет подвижки бобышек по корпусу упростить настройку устройства, уменьшить нефункциональное качание бобышек по плоскости прижима к плоскости, а также за счет увеличения величины натяга при закреплении бобышек повысить надежность их закрепления и эксплуатации устройства.
Выполнение шарнира в виде соединенных винтом второй бобышки и гайки с обнижением по оси, изготовленной из пружинного материала, имеющего жесткость, меньшую фрагмента винта, расположенной между второй бобышкой и гайкой, позволяет уменьшить нефункциональные колебания первой каретки за счет более надежного закрепления винтов и уменьшения их нефункциональных качаний в зазорах.
Перечисленное также расширяет функциональные возможности устройства за счет исследования образцов с большими размерами и массой.
ЛИТЕРАТУРА
1. Патент US №5561299, 01.10.1996.
2. Патент US №5051594, 24.09.1991.
3. Патент US №5360974, 01.11.1994.
4. Патент RU №2199171, 20.02.2003.
5. Scanning tunneling microscope instrumentation. Y.Kyk, P.Sulverman. Rev. Sci.Instrum. 60 (1989), N2, 165-180.
6. Зондовая микроскопия для биологии и медицины. В.А.Быков и др., Сенсорные системы, т.12, №1, 1998 г., с.99-121.
7. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. А. И. Данилов, Успехи химии 64 (8), 1995 г, с.818-833.
8. В.Миронов. Основы сканирующей зондовой микроскопии. М.: Техносфера, 2004, 143 с.
9. Патент RU №2152103, 27.06.2000.
10. S.Gregory, C.T.Rogers. // STM2. p.390.
11. Патент US №4874979, 03.10.1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| ПЬЕЗОСКАНЕР | 2001 |
|
RU2199171C2 |
| ПЬЕЗОСКАНЕР МНОГОФУНКЦИОНАЛЬНЫЙ И СПОСОБ СКАНИРОВАНИЯ В ЗОНДОВОЙ МИКРОСКОПИИ | 2003 |
|
RU2248628C1 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ И КОНТРОЛЯ ЗОНДОВ | 2006 |
|
RU2358239C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |






Изобретение относится к области нанотехнологии и направлено на обеспечение перемещения образца по трем координатам (X, Y, Z), в частности, для перемещения образцов, держателей образцов и других элементов в сканирующей зондовой микроскопии. Изобретение обладает расширенными функциональными возможностями за счет возможности исследования образцов с большими размерами и массой, а также обеспечивает быструю замену образцов при их жестком креплении к каретке, прецизионную повторяемость позиции каретки с образцом, что обеспечивается за счет того, что устройство подвижки образца содержит корпус, на котором посредством первых направляющих установлена первая каретка со вторыми направляющими, закреплены первый и второй пьезоприводы, сопряженные с первой кареткой. Вторая каретка с держателями образца установлена посредством вторых направляющих на первой каретке. В устройство введен, по меньшей мере, один дополнительный пьезопривод. Все пьезоприводы первыми концами сопряжены с корпусом, а вторыми концами с первой кареткой посредством шарниров и представляют собой первые направляющие. Вторая каретка установлена на первой каретке с возможностью съема с нее. 4 з.п. ф-лы, 9 ил.
1. Устройство подвижки образца, содержащее корпус, на котором посредством первых направляющих установлена первая каретка со вторыми направляющими, закреплены первый и второй пьезоприводы, сопряженные с первой кареткой, и вторую каретку с держателями образца, установленную посредством вторых направляющих на первой каретке, отличающийся тем, что в него введен, по меньшей мере, один дополнительный пьезопривод, при этом все пьезоприводы первыми концами сопряжены с корпусом, а вторыми концами - с первой кареткой посредством шарниров, и представляют собой первые направляющие, при этом вторая каретка установлена на первой каретке с возможностью съема с нее.
2. Устройство по п.1, отличающееся тем, что при наличии в нем трех пьезоприводов первый, второй и третий пьезоприводы выполнены в виде секционированных пьезотрубок, продольные оси которых расположены в одной плоскости под углом 120° друг к другу.
3. Устройство по п.1, отличающееся тем, что при наличии в нем четырех пьезоприводов первый, второй, третий и четвертый пьезоприводы выполнены в виде секционированных пьезотрубок, продольные оси которых расположены в одной плоскости под углом 90° друг к другу.
4. Устройство по п.1, отличающееся тем, что пьезоприводы закреплены на корпусе с помощью первых бобышек с выборками.
5. Устройство по п.1, отличающееся тем, что каждый шарнир выполнен в виде соединенных винтом второй бобышки и гайки с обнижением по оси, изготовленной из пружинного материала, и имеющий осевую жесткость меньше фрагмента винта, расположенного в обнижении между бобышкой и гайкой.
| US 5360974 А, 01.11.1994 | |||
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2231095C2 |
| JP 3206994 A, 10.09.1991 | |||
| KR 20040086183 A, 08.10.2004 | |||
| EP 1353110 A2, 15.10.2003. | |||

