Изобретение относится к электрооборудованию электроподвижного состава (ЭПС) железных дорог и предназначено для автоматизации управления электроприводом локомотивов и моторных вагонов с индукторными двигателями.
Известен способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства, согласно которому сравнивают электрический сигнал, характеризующий режим работы колесной пары с заданным пороговым значением по частоте, при превышении частотой этого порогового значения судят о возникновении боксования (Гриневич В.П. Способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства. Патент РФ (RU) 2072670, В 60 L 3/10 1994 г.). Для реализации способа указанный электрический сигнал формируют посредством упруго-диссипативных элементов, установленных на колесах ведущих пар, что существенно усложняет систему.
Наиболее близким по технической сущности к заявленному является способ, заключающийся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар до заданного уровня, вырабатывают управляющие сигналы, воздействующие на систему управления и снижают токи тяговых двигателей, связанных с боксующими (юзующими) колесными парами, и боксование (юз) ликвидируют (Наумов Б.М., Логинов И.Я., Малютин В.А. Устройство для защиты от боксования и юза колесных пар электроподвижного состава. Патент РФ (RU) 2025310, B 60 L 3/10. 1994 г.).
Недостатком данного способа является то, что при ликвидации боксования (юза) колесных пар путем снижения тягового (тормозного) усилия на ободах колес имеет место недоиспользование тяговых (тормозных) свойств электроподвижного состава, так как при сбросе тока двигателей сила тяги должна быть несколько ниже силы сцепления.
Задачей изобретения является повышение тяговых (тормозных) свойств электроподвижного состава.
Решение поставленной задачи достигается тем, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар до заданного уровня, вырабатывают управляющие сигналы, изменяющие режимы работы систем электропривода, связанных с боксующими (юзующими) колесными парами: режим управления двигателями по положению ротора изменяют на синхронный режим путем фиксации частоты тока в обмотках двигателя на значении, существующем в момент появления управляющего сигнала, а восстановление режима управления по положению ротора производят при достижении углом нагрузки двигателя заданного значения.
Положительный эффект изобретения проявляется в том, что при изменении условий сцепления сила тяги (торможения) каждой из колесных пар устанавливается равной силе сцепления, что предотвращает срыв в боксование (юз), а также обеспечивает реализацию режимов тяги (торможения), предельных по условиям сцепления.
Изобретение иллюстрируется следующим примером.
На фиг. 1 показаны изменения силы тяги (F), силы сцепления (S), сигнала, пропорционального ускорению (замедлению) колесной пары (UСК), и уровень допустимого значения ускорения (замедления) колесной пары (Umax) в зависимости от времени.
На фиг. 2 показано изменение угла опережения включения от времени.
При нормальных условиях сцепления двигатель реализует силу тяги (торможения) F по значению меньшую, чем сила сцепления S (интервал t1-t2, фиг. 1). При наезде движущей оси на участок пути с пониженными условиями сцепления (интервал t2-t7) сила сцепления S уменьшается и в момент t3 становится равной силе тяги (торможения) F. На интервале t3-t4 сила тяги (торможения) превышает силу сцепления, вследствие чего развивается процесс проскальзывания колесной пары, в результате чего сила тяги (торможения) уменьшается. В момент времени t4, когда сигнал, пропорциональный ускорению (замедлению) колесной пары Uск, достигает допустимого значения Umax, вырабатывают управляющий сигнал, изменяющий режим работы системы электропривода: управление двигателем по положению ротора изменяют на частотное управление. Для этого отключают сигналы датчиков положения ротора и фиксируют частоту тока в обмотках двигателя на значении, существующем в момент появления управляющего сигнала. При управлении двигателем по положению ротора значение угла опережения включения θ задают принудительно (интервал t1-t4, фиг. 2). В момент времени t4 сигнал, пропорциональный ускорению (замедлению) колесной пары Uск, достигает допустимого значения Umax (фиг. 1), вырабатывают управляющий сигнал, изменяющий режим работы привода на синхронный (при постоянной частоте тока в обмотках двигателя). Угол θ (угол нагрузки в синхронном режиме по терминологии теории электрических машин) освобождается от принудительного задания и устанавливается на интервале t4-t5 (фиг. 2) в такое значение, что среднее значение силы тяги (торможения) F становится равным силе сцепления S. Это предотвращает развитие избыточного скольжения колесной пары и обеспечивает реализацию предельной силы тяги (торможения) по условиям сцепления. На интервале t5-t6 происходит увеличение угла θ вследствие возрастания силы сцепления, при этом сила тяги (торможения) практически отслеживает изменение силы сцепления. В момент t6, когда угол θ достигает исходного (или заданного) значения, производят восстановление привода в режим управления по положению ротора двигателя.
Таким образом, предлагаемый способ защиты от боксования и юза колесных пар путем изменения режима работы вентильно-индукторного электропривода позволяет предотвратить развитие процесса избыточного скольжения колесной пары выше допустимой величины и реализовать режим работы привода, предельный по условиям сцепления, что повышает тяговые (тормозные) свойства электроподвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2382707C2 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2019 |
|
RU2720864C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2023 |
|
RU2821345C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2741851C1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2022 |
|
RU2811618C1 |
| Способ регулирования уровня колебания в подвесках тягового двигателя электровоза и устройство для его осуществления | 2018 |
|
RU2704637C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |

Изобретение относится к области железнодорожного транспорта, может быть использовано в электрооборудовании электроподвижного состава железных дорог и предназначено для автоматизации управления электроприводом локомотивов и моторных вагонов с индукторными двигателями. Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом заключается в том, что при возникновении боксования (юза) одной или нескольких колесных пар вырабатывают управляющие сигналы, изменяющие режим работы системы электропривода. Управление двигателем по положению ротора изменяют на синхронный режим. Технический результат заключается в том, что предотвращается развитие процесса избыточного скольжения колесных пар и реализуется режим работы привода, предельный по условиям сцепления, что повышает тяговые (тормозные) свойства электроподвижного состава. 2 ил.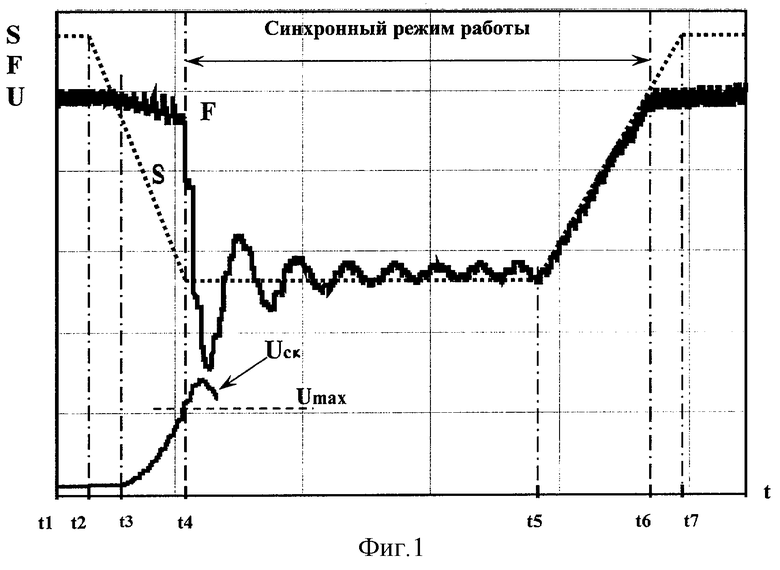
Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом, заключающийся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар, до заданного уровня вырабатывают управляющие сигналы, отличающийся тем, что при достижении сигналами, пропорциональными ускорению (замедлению) колесных пар, заданного значения вырабатывают управляющие сигналы, изменяющие режимы работы систем электропривода, связанных с боксующими (юзующими) колесными парами, режим управления двигателями по положению ротора изменяют на синхронный режим путем фиксации частоты тока в обмотках двигателя на значении, существующем в момент появления управляющего сигнала, а восстановление режима управления по положению ротора производят при достижении углом нагрузки двигателя заданного значения.
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Система для статической стабилизации частоты вращения бесконтактного двигателя постоянного тока | 1976 |
|
SU681514A1 |
| Газоразрядная лампа | 1977 |
|
SU646384A1 |

