Изобретение относится к электрооборудованию подвижного состава железных дорог и предназначено для автоматизации управления электроприводом локомотива.
Известно автоматизированное устройство для защиты от боксования колесных пар электроподвижного состава (Патент RU № 2540223, МПК B60L 3/10), содержащее систему управления электроподвижным составом (ЭПС), датчики частоты колесной пары (КП), подсоединенные к блоку частоты вращения КП, тяговые электродвигатели (ТЭД), по два на каждую из двух тележек, блок управления устройством подачи песка, регулятор напряжения обмоток тягового электродвигателя, выполненный с четырьмя уровнями регулирования напряжения, выпрямительно-инверторный преобразователь (ВИП), установленный на каждой тележке для двух ее тяговых электродвигателей, каждый из которых снабжен двумя контакторами. Система управления ЭПС выполнена из микропроцессорного блока (МБ), блока управления контакторами, блока управления устройством подачи песка, причем выход блока частоты вращения КП соединен с первым входом микропроцессорного блока, вход-выход, которого соединен с входом-выходом блока управления контакторами, первый выход МБ соединен с входами ВИП каждой из тележек, а второй выход МБ - с входом блока управления устройством подачи песка, третий выход соединен с входом регулятора напряжения обмоток ТЭД. ВИП подсоединен двумя цепями, соответственно, к обмоткам первого и второго тягового электродвигателя тележки. Выходы ВИП двух тележек соединены со вторым входом МБ, блок управления контакторами имеет четыре пары выходов, каждая из которых предназначена для замыкания или размыкания первого и второго контакторов ТЭД.
Недостатком известного технического решения является то, что для его реализации необходимо вносить много изменений в силовую (высоковольтную) схему электроподвижного состава, следствием чего является повышение весогабаритных показателей и снижение надежности. Другим недостатком известного устройства является то, что оно не решает проблемы защиты от юза колесных пар, в то время как проблему потери сцепления колес с рельсами необходимо решать одновременно и для боксования и для юза. Только в этом случае может быть получена наибольшая эффективность применяемых технических решений.
Наиболее близким по технической сущности к заявляемому, взятым за прототип, является устройство, реализующее способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении (Патент SU № 1068305, МПК B60L 15/20, опубл. 23.01.84. Бюл. №3), содержащее тяговые двигатели, каждый из которых приводит во вращение одну колесную пару, питающиеся от электрической сети через первый и второй тиристорные преобразователи, на входы которых подключены регуляторы тока (силы тяги) и тормозной силы, соответственно, в режиме тяги и в режиме электрического торможения, индивидуальные для каждой колесной пары датчики частоты вращения колесных пар, подключенные на входы блоков выделения сигналов в виде напряжений Umin и Umax, пропорциональных, соответственно, минимальной и максимальной частотам вращения всех колесных пар локомотива, при этом блок, выделяющий Umin включен на вход первого блока сравнения скоростей, выделяющего разность между Umin и скоростью индивидуальной колесной пары в режиме тяги и на вход второй цепи из последовательно соединенных блоков дифференцирования, выделяющих первую и вторую производные входного сигнала в режиме электрического торможения, а блок, выделяющий Umax, подключен к входу второго блока сравнения скоростей, выделяющего разность между Umax и скоростью индивидуальной колесной пары в режиме электрического торможения, и подключён к входу первой цепи из последовательно соединенных блоков дифференцирования, выделяющих первую и вторую производные входного сигнала в режиме тяги, первый и второй блоки сравнения скоростей подключены на первые входы, соответственно, первого и второго трехканальных функциональных преобразователей, образующих на выходах сигналы, обратно пропорциональные входным, и на входы блока сравнения разности скоростей с пороговым значением, третий вход которого подключен к задатчику порогового значения разности скоростей, а выход – к одному из входов исполнительного блока, выход которого подключен к клапанам песочниц, выходы каждого из блоков дифференцирования, входящих в первую и вторую цепи последовательно соединённых блоков дифференцирования, подключены через блоки сравнения ускорений, ко вторым входам которых подключены задатчики пороговых значений ускорений, к входам исполнительного блока и к второму и третьему входам первого и второго трехканальных функциональных преобразователей, соединённых со входами первого и второго блоков, непрерывно выделяющих минимальные из поступающих на их входы сигналов, к другим входам которых подключены, соответственно, задатчики тока (силы тяги) и тормозной силы и регуляторы скорости в режимах тяги и электрического торможения, ко входам которых подключен задатчик скорости.
Недостатками известного устройства являются недоиспользование тяговых и тормозных свойств локомотивов по условиям сцепления, повышенный механический износ бандажей колесных пар и рельсов, а также повышенный расход песка, что приводит к увеличению эксплуатационных расходов и расходов на техническое обслуживание и ремонт локомотивов. Указанные недостатки обусловлены следующими техническими решениями.
Выявление боксования или юза одной или нескольких (но не всех) колесных пар путем сравнения Umin в тяге и Umax в режиме электрического торможения со скоростью индивидуальной колесной пары происходит не во всех возможных режимах развития боксования и юза, а только при медленном развитии процесса. При быстром развитии боксования и юза быстродействие его недостаточно для предупреждения развития процесса. Особенно это актуально при автоматическом управлении локомотивом, когда, например, при пуске с заданным током регулятор тока стремится поддержать заданный ток, усугубляя тем самым начавшийся процесс боксования и требуется повышенное быстродействие системы управления на выработку управляющих воздействий для восстановления сцепления колес с рельсами. Кроме того, воздействие выделенной в блоках сравнения скоростей разностью ∆U на уставку регуляторов осуществляется без сравнения с эксплуатационным значением скорости скольжения колесной пары, зависящей от скорости локомотива, а это приводит в некоторых режимах к неоправданной потере силы тяги локомотива, так как сброс тока боксующего или юзующего тягового двигателя начинает осуществляться раньше, чем значение выделенной разности достигнет порогового (эксплуатационного) значения, зависящего от скорости локомотива.
Другим недостатком прототипа является то, что выявление синхронного боксования и юза производится путем выделения первой и второй производных от максимальной при тяге и минимальной при торможении скоростей вращения всех колесных пар локомотива, так как при этом срыв сцепления колесных пар с рельсами может быть не всех колесных пар и возможен избыточный сброс сил тяги и торможения, а также подсыпка песка под колесные пары и повышенный механический износ рельсов и бандажей колесных пар.
Задачей изобретения является расширение функциональных возможностей прототипа для улучшения тяговых и тормозных свойств локомотивов при автоматическом управлении в режимах потери сцепления колесных пар с рельсами с целью повышения надежности и снижения расходов на эксплуатацию, техническое обслуживание и ремонт локомотивов.
Сущность изобретения заключается в том, что в устройство, включающее с учетом существенных признаков тяговые двигатели, каждый из которых приводит во вращение одну колесную пару, питающиеся от электрической сети через первый и второй тиристорные преобразователи, на входы которых подключены регуляторы тока (силы тяги) и тормозной силы, соответственно, в режиме тяги и в режиме электрического торможения, индивидуальные для каждой колесной пары датчики частоты вращения колесных пар, подключенные на входы блоков выделения сигналов в виде напряжений Umin и Umax, пропорциональных, соответственно, минимальной и максимальной частотам вращения всех колесных пар локомотива, при этом блок, выделяющий Umin, включен на вход первого блока сравнения скоростей, выделяющего разность между Umin и скоростью индивидуальной колесной пары в режиме тяги, а блок, выделяющий Umax, подключен к входу второго блока сравнения скоростей, выделяющего разность между Umax и скоростью индивидуальной колесной пары в режиме торможения, первый и второй блоки сравнения скоростей подключены на входы блока сравнения разности скоростей с пороговым значением, выход которого подключен к одному из входов исполнительного блока, подключенного к клапанам песочниц, первую и вторую цепи последовательно соединённых блоков дифференцирования, подключённых через блоки сравнения ускорений, ко вторым входам которых подключены задатчики пороговых значений ускорений, к входам исполнительного блока и к второму и третьему входам первого и второго трехканальных функциональных преобразователей, соединённых со входами первого и второго блоков, непрерывно выделяющих минимальные из поступающих на их входы сигналов, к другим входам которых подключены, соответственно, задатчики тока (силы тяги) и тормозной силы и регуляторы скорости в режимах тяги и электрического торможения, ко входам которых подключен задатчик скорости, введены блоки дифференцирования скорости вращения каждой колесной пары, соответственно, в режимах тяги и торможения, подключённые к индивидуальным датчикам скоростей вращения, соответствующих колесных пар, блоки сравнения ускорений с эксплуатационными значениями, входы которых подключены к выходам соответствующих блоков дифференцирования, а выходы - к введённым входам исполнительного блока и к входам введенных четвертых каналов соответствующих функциональных преобразователей, подключенных к введенным четвертым входам блоков выделения минимальных сигналов, введен блок коррекции порогового значения разности скоростей, подключенный к выходам блоков выделения минимальной в тяге и максимальной в торможении скоростей вращения всех колесных пар локомотива, к задатчику порогового значения разности скоростей и к входу блока сравнения разности скоростей, введены связи: выход блока сравнения разности скоростей подключен к первым входам соответствующих функциональных блоков, входы первой, используемой в режиме тяги, и второй, используемой в режиме электрического торможения, цепей последовательно соединенных блоков дифференцирования подключены к выходам блоков выделяющих, соответственно, минимальную и максимальную скорости колесных пар всего локомотива.
Техническим результатом является повышение среднего значения реализуемых сил тяги и торможения по условиям сцепления колёс с рельсами, уменьшение механического износа бандажей колесных пар и рельсов, и сокращение расхода песка. Это обеспечивается за счет введения новых блоков в систему автоматического управления, новых связей между известными блоками системы управления и новых входов в известные блоки.
На фиг.1 представлена блок-схема заявляемого устройства для регулирования сил тяги и торможения электроподвижного состава при автоматическом управлении.
Устройство для автоматического регулирования сил тяги и торможения при автоматическом управлении содержит тяговые двигатели 1-4, каждый из которых приводит во вращение одну из колесных пар 5-8, индивидуальные для каждой колесной пары датчики частоты вращения 13-16, клапаны песочниц 51-54, подключенные к исполнительному блоку 50, каналы I, II для регулирования сил, соответственно, тяги и торможения, включающие в себя тиристорные преобразователи 9, 10, входы которых подключены к питающей электрической сети и к выходам блоков, соответственно, 11, 12 регуляторов тока (силы тяги) и тормозной силы, а выходы – к тяговым двигателям 1-4,
датчики 13-16 скорости колесных пар локомотива, подключенны к блокам 17, 18, выделяющим минимальный в тяге и максимальный в торможении сигналы, пропорциональные скоростям колесных пар всего локомотива, выходы которых подключены ко входам блоков 19, 20 сравнения скоростей. На другие входы блоков 19, 20 сравнения скоростей подключены датчики частоты вращения 13 и 16, а выходы блоков 19, 20 подключены ко входам блока 56 сравнения разности скоростей с пороговым значением, выход которого подключен на один из входов исполнительного блока 50 и на входы четырехканальных функциональных преобразователей, образующих на выходах сигналы обратно пропорциональные входным сигналам и подключенных к входам блоков 23 и 24, непрерывно выделяющих минимальные из поступающих на их входы сигналов, на другие входы которых подключены задатчики тока (силы тяги) и силы торможения 25, 27 и регуляторы скорости 26 в режиме тяги и 28 в режиме торможения, входы которых подключены к задатчику скоростей 29.
Каналы I, II включают также блоки 57, 58 дифференцирования скорости колесных пар, подключённых входами к соответствующим индивидуальным датчикам скорости 13 и 16, а выходами к входам блоков 59, 60 сравнения текущих значений ускорений колесных пар с эксплуатационными значениями, подключенных на входы блоков 21, 22 четырехканальных функциональных преобразователей и на входы исполнительного блока 50. Блоки 17 и 18 подключены также к входам последовательно соединенных
дифференцирующих блоков, соответственно, 31, 33 в тяге и 30, 32 при торможении, выделяющих первую и вторую производные скоростей, два выхода каждого из которых подключены через блоки сравнения ускорений 36, 37, 38, 39 в тяге и 34, 35, 42, 43 в режиме торможения к входам исполнительного блока 50 и к входам четырехканальных функциональных преобразователей 21 и 22, а ко вторым входам блоков сравнения ускорений подключены задатчики пороговых значений ускорений 40, 41, 46, 47, 44, 45, 48, 49, блок 61 коррекции порогового значения разности скоростей, входы которого подключены к задатчику 55 порогового значения разности скоростей и к выходам блоков 17, 18, выделяющих минимальную и максимальную скорости колесных пар всего электровоза, соответственно, в режимах тяги и торможения, а выход подключен к блоку 56 сравнения разности скоростей с пороговым значением, зависящим от скорости локомотива.
Устройство работает следующим образом. До возникновения боксования и юза колесных пар локомотива устройство работает как двухконтурная система автоматического регулирования токов тяговых двигателей в режимах тяги и электрического торможения, обеспечивая разгон (торможение) локомотива с заданными и автоматически поддерживаемыми токами тяговых двигателей, до заданной скорости с последующей стабилизацией заданной скорости
Во время пуска задается скорость движения (задатчик 29) и пусковой ток (задатчик 25).
Регулятор тока (силы тяги) 11, воздействуя на тиристорный преобразователь 9, питающий тяговые двигатели, обеспечивает разгон локомотива с заданными и автоматически поддерживаемыми токами (силой тяги) до заданной скорости с последующим автоматическим поддержанием заданной скорости регулятором скорости 26.
В режиме электрического торможения задается ток (тормозная сила) задатчиком 27 и скорость движения на спуске (задатчиком 29). Регуляторы тока (тормозной силы) 12 и скорости 28 обеспечивают стабилизацию заданных параметров.
Нарушение рассмотренных режимов автоматического регулирования сил тяги и торможения происходит при боксовании (юзе) колесных пар. Для восстановления заданных режимов устройством предусмотрено автоматическое выявление возмущающих факторов в виде боксования (юза) и соответствующие воздействия в виде подсыпки песка под колесные пары и снижение сил тяги (торможения).
Это происходит следующим образом.
При медленном развитии боксования (юза) одной или нескольких колесных пар (но не всех) разность между минимальной частотой вращения всех колесных пар локомотива, выделяемой блоком 17, и частотой вращения боксующей колесной пары (или между максимальной частотой, выделяемой блоком 18, и частотой вращения юзующей колесной пары) увеличивается пропорционально глубине боксования (юза). Сравнение указанных частот и выделение их разности в режимах тяги и торможения осуществляется в блоках сравнения скоростей, соответственно, 19 и 20 на выходах которых появляются сигналы пропорциональные глубине боксования или юза.
Как только сигналы, пропорциональные разности частот вращения колесных пар превысят пороговое значение, задаваемое блоком 61, на выходе блока 56 сравнения разности скоростей, появляется сигнал, который через исполнительный блок 50 включает клапаны подачи песка под колесные пары локомотива. Одновременно сигнал с выхода блока 56 подаётся на один из входов четырехканальных функциональных преобразователей 21 и 22. При этом пороговое значение разности скоростей корректируется сигналами пропорциональными скорости локомотива, которые поступают на входы блока 61 с выходов блоков 17 и 18.
Если боксование (юз) удалось устранить за счет подачи песка под колесные пары, то сигналы на выходах блоков 19 и 20 сравнения скоростей уменьшаются, становясь ниже порогового значения и сигнал с выхода блока 56 сравнения разности скоростей снимается, и подача песка прекращается.
Если же боксование (юз) не прекращаются, то сигнал на выходе блока 56 продолжает расти, а сигналы на выходах функциональных преобразователей 21 и 22 будут уменьшаться обратно пропорционально входным (т.е. глубине боксования или юза), так как эти блоки выделяют сигналы обратно пропорциональные выходным сигналам и эти сигналы поступают на входы соответствующих блоков 23 и 24, непрерывно выделяющих минимальный из входных сигналов.
Таким образом в процессе развития боксования или юза выходные сигналы блоков 21 и 22 уменьшаются и, становясь с некоторого момента меньше других входных сигналов блоков 23 и 24, определяют уставки соответствующих регуляторов 11, 12 (силы тяги) и силы торможения, что приводит к уменьшению токов боксующего или юзующего двигателя на величину пропорциональную глубине боксования (юза) и к прекращению самого процесса боксования (юза), автоматически восстанавливая заданные режимы движения локомотива.
Быстрейшему прекращению боксования (юза) содействует и подача песка под колесные пары, которая продолжается одновременно со снижением тока боксующего (юзующего) двигателя.
Для более точного регулирования сил тяги и торможения и для уменьшения (предотвращения) избыточного снижения сил тяги и торможения, которое происходит при ликвидации (прекращении) срыва сцепления колес с рельсами, предусмотрена корректировка порогового уровня разности скоростей в зависимости от скорости локомотива, для чего предусмотрен блок 61, в котором происходит корректировка порогового уровня разности скоростей заданного блоком 55, сигналами, приходящими с блоков 17 и 18, выделяющими сигналы, пропорциональные соответственно минимальной в тяге и максимальной при торможении скоростям вращения всех колесных пар локомотива.
Для выявления быстрого развития боксования (юза) одной или нескольких колесных пар, (но не всех) служат дифференцирующие блоки 57 и 58, подключенные к датчикам скорости 13 и 16. На выходах блоков 57 и 58 появляются сигналы, пропорциональные ускорениям соответствующих колесных пар, которые сравниваются в блоках 59 и 60 с пороговыми значениями, соответствующими эксплуатационным значениям ускорений и при превышении порогового значения, воздействуют на исполнительный блок 50 для подачи песка под колесные пары и на вторые входы функциональных преобразователей 21 и 22, воздействуя на уставку соответствующих регуляторов, понижая токи тяговых двигателей аналогично алгоритму, описанному выше. По мере восстановления сцепления сигналы на выходах блоков 59 и 60 уменьшаются вплоть до нулевого значения и заданные значения регулируемых параметров восстанавливаются.
Режим одновременного (синхронного) боксования (юза) всех колесных пар характеризуется разной степенью интенсивности развития процесса.
Для выявления синхронного боксования предусмотрены последовательно соединенные блоки 31 и 33 дифференцирования, подключенные на выход блока 17, выделяющего сигналы, пропорциональные минимальной скорости вращения всех колесных пар локомотива в тяге. В зависимости от интенсивности развития боксования на выходах блоков 31, 33 появляются сигналы пропорциональные первой и второй производным минимальной скорости вращения колесных пар локомотива. Эти сигналы сравниваются в блоках 36 и 37 (первая производная) и в блоках 38 и 39 (вторая производная) с пороговыми значениями производных, задаваемых блоками соответственно 46 и 47 для первой производной и 40 и 41 для второй производной. Причем уставки блоков 47 и 41 ниже, чем уставки блоков 46 и 40.
При превышении значения ускорения колесной пары с минимальной частотой вращения пороговых значений, появляются сигналы сначала на выходах блоков 37 и (или) 39, которые поступают в исполнительный блок 50 и выдается команда на подачу песка под колесные пары.
Если же с помощью пескоподачи не удаётся восстановить сцепление колес с рельсами и ускорение колесных пар возрастает, то формируются сигналы на выходе блоков 36 и (или) 38, которые подаются на входы функционального преобразователя 21, преобразуются в величины обратно пропорциональные входным и поступают на входы логического блока 23. Как только какой-либо из этих сигналов окажется меньше остальных входных этого блока, он начинает определять уставку регулятора тока (силы тяги) и происходит снижение тягового тока на величину пропорциональную глубине боксования.
В режиме электрического торможения при юзе всех колесных пар сигнал замедления самой быстровращающейся колесной пары с выхода блока 18 поступает на входы последовательно соединенных блоков 30 и 32, выделяющих на своих выходах сигналы, пропорциональные, соответственно, первой и второй производным входного, которые сравниваются, соответственно, в блоках 34, 35 и 42, 43.
При превышении пороговых значений выходные сигналы с блоков сравнения 35 и 43 воздействуют на исполнительный блок 50 для включения клапанов подсыпки песка, а с выходов блоков 34 и 42 – в функциональный преобразователь 22, где преобразуются в величины обратно пропорциональные входным и поступают на входы логического элемента 24, выделяющего минимальный из поступающих на его вход сигналов, который и определяет уставку регулятора тормозной силы 12, обеспечивая снижение тормозного тока на величину, пропорциональную глубине юза колесных пар.
Значения уставок блоков 45 и 49 ниже уставок соответственно блоков 44 и 48, чем обеспечивается разнесение во времени воздействий сначала на подсыпку песка под колесной пары и, если сцепление не восстанавливается, то на снижение тормозного тока.
Таким образом, как в режиме тяги, так и в режиме электрического торможения обеспечивается непрерывное слежение за состоянием сцепления по комплексу показателей и воздействие на исполнительные органы для поддержания заданных параметров движения локомотивов.
Использование предложенного устройства для регулирования сил тяги и торможения электроподвижного состава при автоматическом управлении позволяет решить поставленную задачу, расширив функциональные возможности устройства в части выявления процессов боксования и юза колесных пар локомотива и выработки управляющих воздействий для восстановления сцепления, что повышает среднее значение реализуемых по условиям сцепления сил тяги и торможения, снижает механический износ бандажей колесных пар и рельсов и сокращает расход песка при эксплуатации и техническом обслуживании локомотивов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1977 |
|
SU747747A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для защиты от избыточного скольжения колесных пар транспортного средства | 1984 |
|
SU1316860A2 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1977 |
|
SU929473A1 |
| Устройство для автоматического управления электроподвижным составом | 1977 |
|
SU716888A1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |

Изобретение относится к электрическим тяговым системам транспортных средств. Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении содержит тяговые двигатели, датчики частоты вращения колесных пар и клапаны песочниц, задатчик порогового значения разности скоростей и каналы для управления локомотивом. Каналы для управления содержат тиристорные преобразователи, блоки выделения частот вращения колесных пар, блоки сравнения скоростей, блок сравнения разности скоростей, исполнительный блок, функциональные преобразователи, блоки, выделяющие минимальные сигналы, задатчики тока и тормозной силы, регуляторы скорости, блок задания скорости, две цепи, каждая из которых состоит из двух блоков дифференцирования, блоки сравнения ускорений и задатчики пороговых значений ускорений. При этом устройство для регулирования силы тяги и торможения также содержит блоки дифференцирования скоростей колесных пар, блоки сравнения с пороговыми значениями ускорений, блок коррекции порогового значения разности скоростей, четвертые каналы функциональных преобразователей, четвертые входы блоков выделения минимальных сигналов и дополнительные входы исполнительного блока. Технический результат заключается в улучшении тяговых и тормозных свойств локомотивов. 1 ил.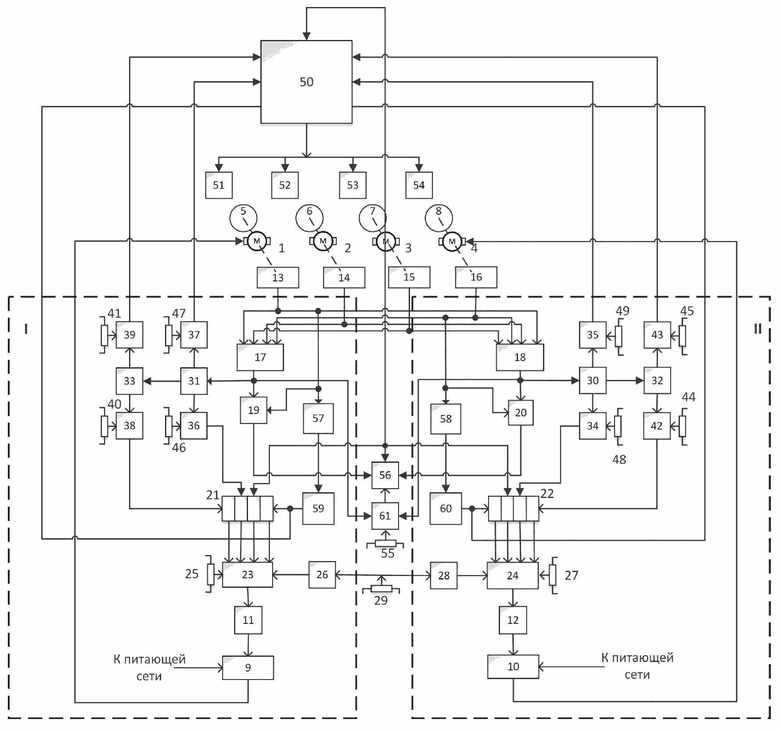
Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении, включающее тяговые двигатели, каждый из которых приводит во вращение одну колесную пару, индивидуальные для каждой колесной пары датчики частоты вращения и клапаны песочниц, подключенные к выходу исполнительного блока, задатчик порогового значения разности скоростей, I и II каналы для управления локомотивом в режиме тяги и электрического торможения, включающие в себя соответственно тиристорные преобразователи, входы которых подключены к питающей электрической сети и к выходам регуляторов тока в тяге и тормозной силы в режиме электрического торможения, а выходы тиристорных преобразователей подключены к тяговым двигателям, блоки выделения соответственно минимальной в тяге и максимальной при торможении частот вращения колесных пар для всего локомотива, входы которых подключены к датчикам частоты вращения колесных пар, а выходы - к входам блоков сравнения скоростей, к другим входам которых подключены датчики частоты вращения индивидуальных колесных пар, а выходы блоков сравнения скоростей подключены к входам блока сравнения разности скоростей, выход которого подключен на вход исполнительного блока, функциональные преобразователи, соединенные тремя выходами с тремя входами блоков, выделяющих минимальные сигналы, на другие входы которых подключены соответственно задатчики тока и тормозной силы, выходы регуляторов скорости в режимах тяги и торможения, на входы которых подключен блок задания скорости, две цепи, каждая из которых состоит из двух последовательно соединенных блоков дифференцирования, каждый из которых подключен через блоки сравнения ускорений к входам исполнительного блока и ко вторым и третьим входам функциональных преобразователей, а к блокам сравнения ускорений подключены также задатчики пороговых значений ускорений, отличающееся тем, что дополнительно содержит блоки дифференцирования скоростей колесных пар в режимах тяги и торможения, блоки сравнения с пороговыми значениями ускорений, блок коррекции порогового значения разности скоростей и новые связи между известными блоками, четвертые каналы функциональных преобразователей, четвертые входы блоков выделения минимальных сигналов, шестой и седьмой входы исполнительного блока, причем входы блоков дифференцирования подключены к датчикам скоростей колесных пар, а выходы через блоки сравнения ускорений подключены к введенным четвертым каналам функциональных преобразователей и к введенным входам исполнительного блока, а выходы четвертых каналов подключены к четвертым входам блоков выделения минимальных сигналов, входы блока коррекции порогового значения разности скоростей подключены к выходам блоков выделения минимальной и максимальной частот вращения колесных пар для всего локомотива и к задатчику порогового значения разности частот, две цепи, каждая из которых состоит из двух последовательно соединенных блоков дифференцирования, подключены входами к блокам выделения минимальной и максимальной частот вращения колесных пар, при этом цепь, относящаяся к режиму тяги, подключена к блоку выделения минимальной частоты, а цепь, относящаяся к режиму торможения, подключена к блоку выделения максимальной частоты, а выход блока выделения разности скоростей подключён на входы функциональных преобразователей.
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| JP 2000190843 A, 11.07.2000. | |||

