Изобретение относится к транспортной технике, в частности к автоматизации тягового привода электроподвижного состава с асинхронными тяговыми двигателями.
Известен способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства, согласно которому сравнивают электрический сигнал, характеризующий режим работы колесной пары с заданным пороговым значением по частоте, при превышении частотой этого порогового значения судят о возникновении боксования (Гриневич В. Способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства. Патент РФ (RU) 2072670, B60L 3/10 1994 г. ). Для реализации способа указанный электрический сигнал формируют посредством упруго-диссипативных элементов установленных на колесах ведущих пар, что существенно усложняет систему и снижают ее надежность.
Известен способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства, согласно которому при возникновения боксования одной или нескольких колесных пар измеряют текущие активные электрические мощности статорных обмоток асинхронных тяговых двигателей, измеряют текущую температуру внешней среды тяговой секции и текущее горизонтальное положения тяговой секции, измеренные значения температуры внешней среды тяговой секции и горизонтального положения тяговой секции подают на входы заранее обученной искусственной нейронной сети прямого распространения, а с выхода получают значение глубины процесса боксования, измеренные текущие значения активных электрических мощностей статорных обмоток асинхронных тяговых двигателей и значение глубины процесса боксования используют для определения пороговой мощности, вычисляют абсолютную разницу измеренных значений активных электрических мощностей, абсолютную разницу активных электрических мощностей сравнивают с пороговой мощностью и выдают корректирующий сигнал о снижении угловой частоты вращения движущейся с избыточным скольжением колесной пары или угловых частот вращения движущихся с избыточным скольжением колесных пар (Харисов И.Р., Брексон В.В., Лимонов Д.Э., Шатравин К.М., Коробицын К.Р. Способ защиты от боксования электроподвижного состава с асинхронными тяговыми двигателями. Патент РФ (RU) 2741851, 2020 г. ). Недостатком такого способа является невозможность раннего определения процессов избыточного скольжения, обусловленное не учетом резко изменяющихся условий способствующих процессам избыточного скольжения.
Наиболее близким по технической сущности к заявленному является способ, заключающейся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар до заданного уровня, вырабатывают управляющие сигналы изменяющие режимы работы систем электропривода (Киреев А.В. Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом. Патент РФ (RU) 2382707, B60L 3/10 2010 г. ). Недостатком данного способа является длительное время обнаружения избыточного скольжения по сигналам пропорциональных ускорению (замедлению), связанное с большой инерционностью электроподвижного состава.
Задачей изобретения является повышение тяговых свойств электроподвижного состава.
Решение поставленной задачи достигается тем, что определяют задание по скорости движения электроподвижного состава. Измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя. Переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары. Вычисляют ошибку между заданной скоростью и окружной скоростью колесной пары. На основании вычисленной ошибки определяют момент задания по законам управления пропорционально-интегрального регулятора. Вычисляют значение текущего момента сцепления и ограничивают нижний предел значения момента задания на уровне значения вычисленного текущего момента сцепления. Ограниченное значения момента задания определяют как задание для векторной системы управления.
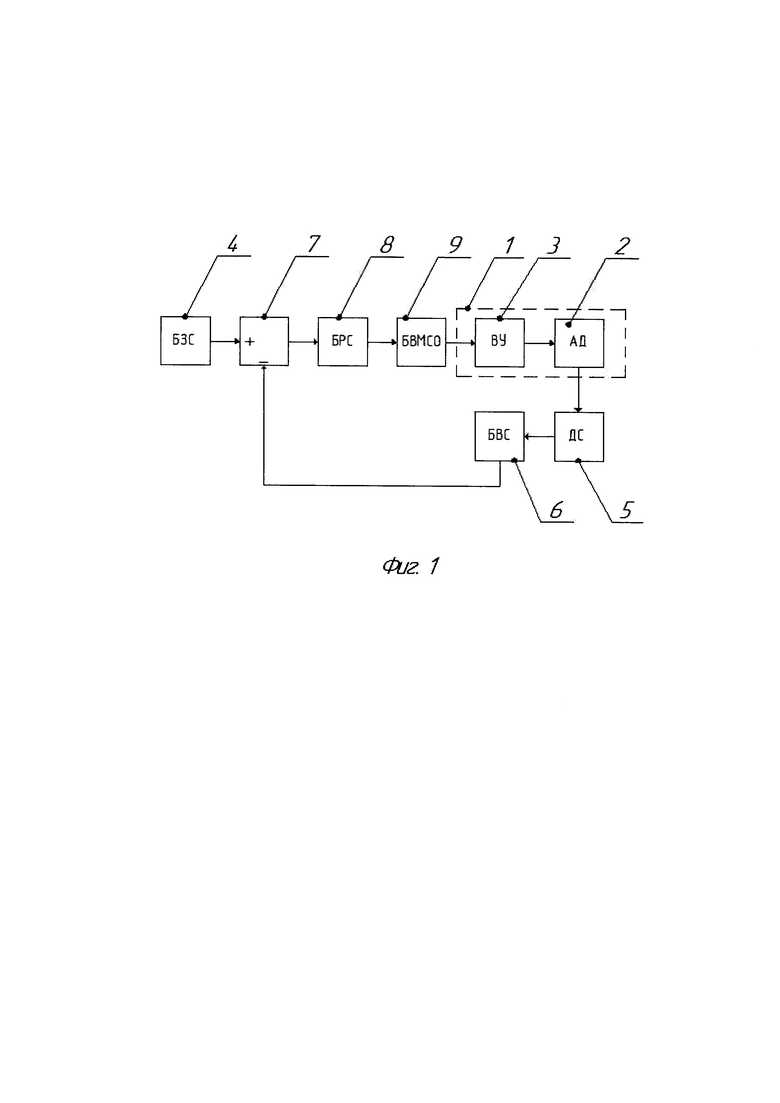
Суть предлагаемого способа защиты от боксования электроподвижного состава с асинхронными тяговыми двигателями поясняется функциональной схемой устройства приведенной на фиг. 1, реализующей предлагаемый способ на примере однодвигательного асинхронного тягового привода.
Согласно изобретению, определяют задание по скорости движения электроподвижного состава. Измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя. Переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары. Вычисляют ошибку между заданной скоростью и окружной скоростью колесной пары. На основании вычисленной ошибки определяют момент задания по законам управления пропорционально-интегрального регулятора. Вычисляют значение текущего момента сцепления и ограничивают нижний предел значения момента задания на уровне значения вычисленного текущего момента сцепления. Ограниченное значения момента задания определяют как задание для векторной системы управления.
Ведущие оси транспортного средства согласно фиг. 1, снабжены частотно-регулируемым приводом 1 с векторным управлением, содержащим асинхронный тяговый двигатель 2 и систему векторного управления с широтно-импульсной модуляцией 3.
Устройство защиты от боксования содержит блок задания скорости 4, который определяет задание линейной скорости как задающие воздействие асинхронного тягового двигателя 2 как в случае отсутствия избыточного скольжения, так и в случае наличия избыточного скольжения. Устройство содержит датчик скорости 5 который измеряет текущую угловую частоту вращения вала асинхронного тягового двигателя 2. Выход датчика скорости 5 соединен со входом блока вычисления скорости 6, который вычисляет окружную скорость колесной пары. Выход блока задания скорости 4 соединен с положительным входом блока сумматора 7 а выход блока вычисления скорости 6 соединен с отрицательным входом блока сумматора 7. Блок сумматора 7 вычисляет разницу между значениями выходных сигналов блока задания скорости 4 и блока вычисления скорости 6. Выход блока сумматора 7 соединен со входом блока регулятора скорости 8, который на основании закона управления пропорционально-интегрального регулятора скорости вычисляет момент задания локомотива. Выход блока регулятора скорости 8 соединен со входом блока вычисления момента сцепления и ограничения 9, который вычисляет текущий момент сцепления в зоне «колесо-рельс» и ограничивает нижний предел значения выхода блока регулятора скорости 8 на уровне значения вычисленного текущего момента сцепления, и передает ограниченное значение момента задания системе векторного управления с широтно-импульсной модуляцией 3.
Устройство работает следующим образом.
Блок задания скорости 4 определяет текущее задание по линейной скорости и передает вычисленное значение на положительный вход блока сумматора 7. Датчик скорости 5 измеряет текущую угловую частоту вращения вала асинхронного тягового двигателя 2. Датчик скорости 5 передает измеренное значение на вход блока вычисления скорости 6, который вычисляет окружную скорость колесной пары. Блок вычисления скорости 6 передает вычисленное значение на отрицательный вход блока сумматора 7. Блок сумматора 7 вычитает из выходного значения сигнала блока задания скорости 4 выходное значение блока вычисления скорости 6 и передает вычисленное значение блоку регулятора скорости 8. Блок регулятора скорости 8 вычисляет момент задания на основании закона управления пропорционально-интегрального регулятора и передает вычисленное значение на положительный вход блока вычисления момента сцепления и ограничения 9. Блок вычисления момента сцепления и ограничения 9 вычисляет текущий момент сцепления в зоне «колесо-рельс», и ограничивает нижний предел значения выхода блока регулятора скорости 8 на уровне значения вычисленного текущего момента сцепления и передает выходное значение ограниченного момента задания системе векторного управления с широтно-импульсной модуляцией 3.
Таким образом, предлагаемый способ защиты от боксования электроподвижного состава с асинхронными тяговыми, позволяет реализовать максимально возможные тяговые свойства, за счет вычисления текущего момента сцепления и ограничения нижнего предела момента задания, полученного с пропорционально-интегрального регулятора скорости на уровне значения вычисленного текущего момента сцепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2024 |
|
RU2840243C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2022 |
|
RU2811618C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2021 |
|
RU2758797C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2019 |
|
RU2720864C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2741851C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| Устройство для защиты от боксования и юза колесных пар электроподвижного состава | 1977 |
|
SU676478A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
Изобретение относится к управлению тяговой системой транспортных средств с электротягой. Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями заключается в том, что определяют задание по скорости движения электроподвижного состава, измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя, переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары, вычисляют ошибку между заданной скоростью движения и окружной скоростью колесной пары. На основании вычисленной ошибки определяют момент задания по законам управления пропорционально-интегрального регулятора. Вычисляют значение текущего момента сцепления и ограничивают нижний предел значения момента задания на уровне значения вычисленного текущего момента сцепления, а ограниченное значение момента задания определяют как задание для векторной системы управления с широтно-импульсной модуляцией. Технический результат заключается в повышении тяговых свойств электроподвижного состава. 1 ил.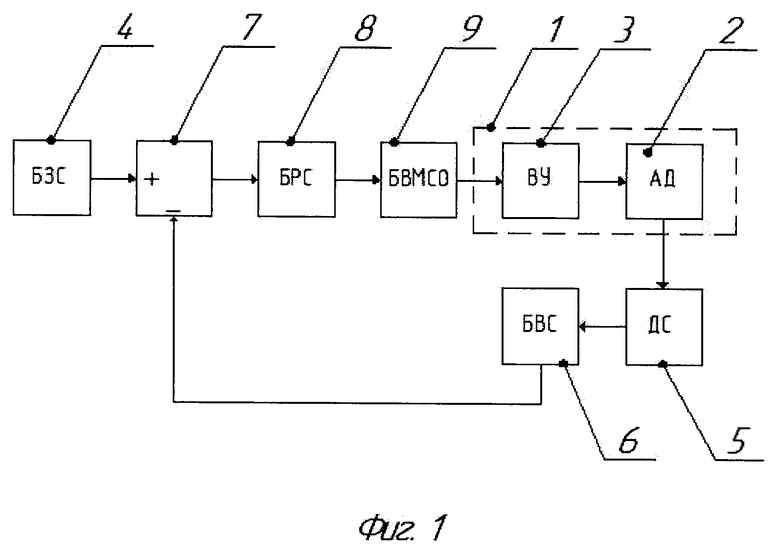
Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями, заключающийся в том, что определяют задание по скорости движения электроподвижного состава, измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя, переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары, вычисляют ошибку между заданной скоростью движения и окружной скоростью колесной пары, а на основании вычисленной ошибки определяют момент задания по законам управления пропорционально-интегрального регулятора, отличающийся тем, что вычисляют значение текущего момента сцепления и ограничивают нижний предел значения момента задания на уровне значения вычисленного текущего момента сцепления, а ограниченное значение момента задания определяют как задание для векторной системы управления с широтно-импульсной модуляцией.
| EP 0218839 B1, 19.03.1992 | |||
| EP 3680123 A1, 15.07.2020 | |||
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2021 |
|
RU2758797C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2382707C2 |

