Изобретение относится к транспортной технике, в частности к автоматизации тягового привода электроподвижного состава с асинхронными тяговыми двигателями.
Известен способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства, согласно которому сравнивают электрический сигнал, характеризующий режим работы колесной пары с заданным пороговым значением по частоте, при превышении частотой этого порогового значения судят о возникновении боксования (Гриневич В. Способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства. Патент РФ (RU) 2072670, B60L 3/10 1994 г.). Для реализации способа указанный электрический сигнал формируют посредством упруго-диссипативных элементов установленных на колесах ведущих пар, что существенно усложняет систему и снижают ее надежность.
Известен способ, заключающийся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар до заданного уровня, вырабатывают управляющие сигналы изменяющие режимы работы систем электропривода (Киреев А.В. Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом. Патент РФ (RU) 2382707, B60L 3/10 2010 г.). Недостатком данного способа является длительное время обнаружения избыточного скольжения по сигналам пропорциональных ускорению (замедлению), связанное с большой инерционностью электроподвижного состава.
Наиболее близким по технической сущности к заявленному является способ, заключающейся в том, что при возникновении боксования колеса, подают задающее воздействие, превышающее линейную скорость, на ПИД регулятор скорости с обратной связью по скорости боксующего колеса, а в свою очередь ПИД регулятор скорости формирует управляющее воздействие на дроссельную заслонку (Yoshifumi С/О Toyota Jidosha K.K. YagiTakayoshi С/О Toyota Jidosha K.K. NakatomiKiyoyuki С/О Toyota Jidosha K.K. UchidaHiroshi С/О Toyota Jidosha K.K. Igata. An acceleration slip control device for a vehicle. EP 0485779 A2). Недостатком такого способа является возможность развития сильного избыточного скольжения в начальный момент времени обнаружения избыточного скольжения.
Задачей изобретения является повышение тяговых свойств электроподвижного состава.
Решение поставленной задачи достигается тем, что задают прямой момент задания для асинхронного тягового двигателя. Измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя и текущую линейную скорость локомотива. Переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары. Сравнивают текущую окружную скорость колесной пары и текущую линейную скорость локомотива. При отсутствии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, определяют задающее воздействие для асинхронного тягового двигателя равного прямому моменту задания. При наличии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, производят переключение задающего воздействия с управления прямым моментом задания на момент формируемый ПИ регулятором скорости с обратной связью по окружной скорости колесной пары, при чем из значения момента сформированного ПИ регулятором скорости однократно вычитают значение равного десяти процентам от значения прямого момента задания.
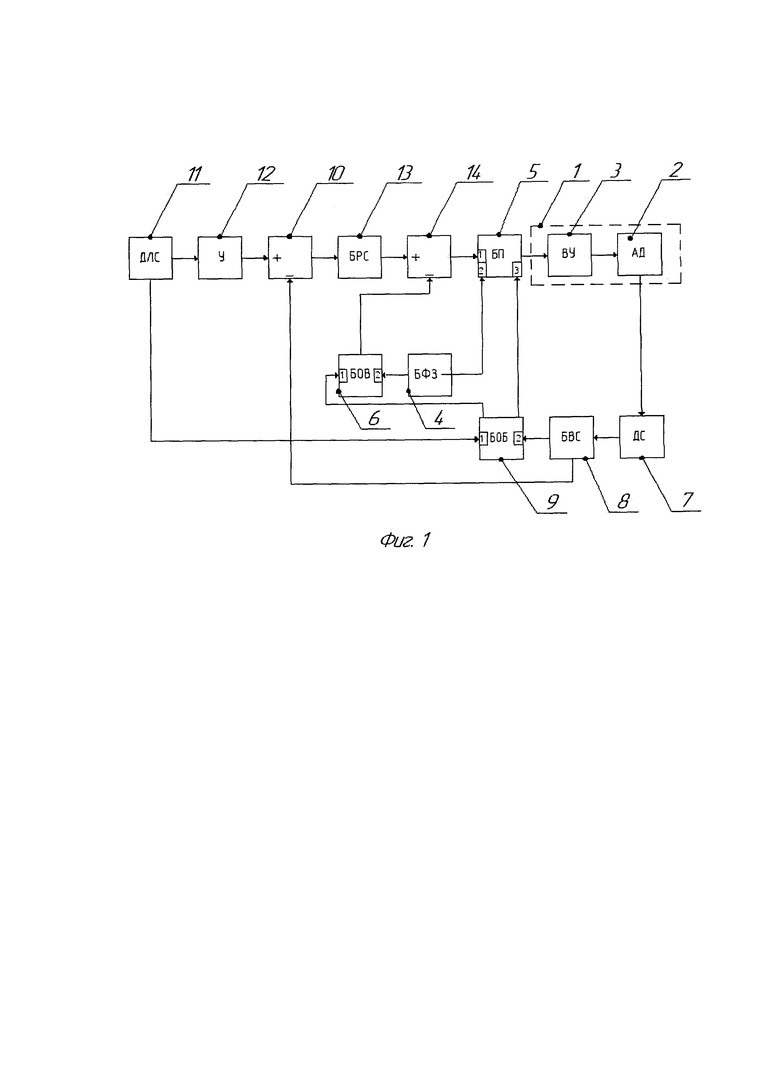
Суть предлагаемого способа защиты от боксования электроподвижного состава с асинхронными тяговыми двигателями поясняется функциональной схемой устройства приведенной на фиг. 1, реализующей предлагаемый способ на примере однодвигательного асинхронного тягового привода.
Согласно изобретению, задают прямой момент задания для асинхронного тягового двигателя. Измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя и текущую линейную скорость локомотива. Переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары. Сравнивают текущую окружную скорость колесной пары и текущую линейную скорость. При отсутствии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, определяют задающее воздействие для асинхронного тягового двигателя равного прямому моменту задания. При наличии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, производят переключение задающего воздействия с управления прямым моментом задания на момент формируемый ПИ регулятором скорости с обратной связью по окружной скорости колесной пары, при чем из значения момента сформированного ПИ регулятором скорости однократно вычитают значение равного десяти процентам от значения прямого момента задания.
Ведущие оси транспортного средства согласно фиг. 1, снабжены частотно-регулируемым приводом 1 с векторным управлением, содержащим асинхронный тяговый двигатель 2 и систему векторного управления с широтно-импульсной модуляцией 3.
Устройство защиты от боксования содержит блок формирования задания 4 который определяет прямой момент задания как задающее воздействие асинхронного тягового двигателя 2 в случае отсутствия избыточного скольжения. Выходы блока формирования задания 4 соединены со вторым входом блока переключения 5 и со вторым входом блока однократного воздействия 6. Устройство содержит датчик скорости 7 который измеряет текущую угловую частоту вращения вала асинхронного тягового двигателя 2. Выход датчика скорости 7 соединен с входом блока вычисления скорости 8, который вычисляет окружную скорость колесной пары. Выходы блока вычисления скорости 8 соединены со вторым входом блока обнаружения боксования 9 и отрицательным входом блока сумматора ошибки 10. Блок обнаружения боксования 9 определяет избыточное скольжение колесной пары, выходы блока обнаружения боксования 9 соединены с третьим входом блока переключения 5 и с первым входом блока однократного воздействия 6. Устройство содержит датчик линейной скорости 11, который измеряет текущую линейную скорость локомотива. Выходы датчика линейной скорости 11 соединены с первым входом блока обнаружения боксования 9 и с входом блока усилителя 12, который усиливает сигнал датчика линейной скорости 11. Выходы блока усилителя 12 соединены с положительным входом сумматора ошибки 10, который вычисляет разницу между значениями выходных сигналов блока усилителя 12 и блока вычисления скорости 8. Выход блока сумматора ошибки 10 соединен с входом блока регулятора скорости 13, который на основании алгоритма ПИ регулятора скорости вычисляет момент задания локомотива. Выход блока однократного воздействия 6 и выход блока регулятора скорости соединены с входами блока сумматора корректировки 14, который вычисляет разницу между значениями сигналов блока регулятора скорости 13 и блока однократного воздействия 6. Выход блока сумматора корректировки 14 соединен с первым входом блока переключения 5, который выполняет переключение между задающем воздействием прямого момента задания и задающим воздействием момента задания ПИ регулятора скорости с учетом однократной корректировки момента задания полученного на выходе сумматора корректировки 14.
Блок вычисления скорости 8 определяет значение окружной скорости колесной пары путем перевода угловой скорости вращения в окружную скорость колесной пары.
Блок обнаружения боксования 9, вычисляет относительное скольжение колесной пары по следующему выражению:
где λ - относительное скольжение колесной пары;
Vоскп - окружная скорость колесной пары;
Vл - линейная скорость движения локомотива.
В случае превышения значения относительного скольжения колесной пары значения семи процентов, блок обнаружения боксования 9 определяет избыточное скольжение. Иначе блок обнаружения боксования 9 не определяет избыточное скольжение.
Блок усилителя 12, усиливает значение линейной скорости на шесть процентов.
Блок однократного воздействия 6, в случае определения избыточного скольжения формирует однократное воздействие равного десяти процентам от значения прямого момента задания.
Устройство работает следующим образом.
Блок формирования задания 4 определяет прямой момент задания и передает его на второй вход блока однократного воздействия 6 и на второй вход блока переключения 5. Датчик скорости 7 и датчик линейной скорости 11 измеряют текущие угловую частоту вращения вала асинхронного тягового двигателя 2 и линейную скорость локомотива соответственно. Датчик скорости 7 передает измеренное значение на вход блока вычисления скорости 8, который вычисляет окружную скорость колесной пары. Блок вычисления скорости 8 передает вычисленное значение на второй вход блока обнаружения боксования 9 и на отрицательный вход блок сумматора ошибки 10. Датчик линейной скорости 11 передает измеренное значение на первый вход блока обнаружения боксования 9 и на вход блока усилителя 12. В случае отсутствия избыточного скольжения блок обнаружения боксования 9 передает сигнал об отсутствии избыточного скольжения на третий вход блока переключения 5. Блок переключения 5 принимает сигнал об отсутствии избыточного скольжения и передает прямой момент задания системе векторного управления с широтно-импульсной модуляцией 3. В случае наличия избыточного скольжения блок обнаружения боксования 9 передает сигнал о наличии избыточного скольжения на третий вход блока переключения 5 и на первый вход блока однократного воздействия 6. Блок однократного воздействия 6 формирует однократное воздействие равного десяти процентам от прямого момента задания и передает однократный сигнал на отрицательный вход сумматора корректировки 14. Датчик линейной скорости 11 передает измеренное значение на вход блока усилителя 12, который усиливает принимаемый сигнал на шесть процентов и передает его на положительный вход сумматора ошибки 10. Блок сумматора ошибки 10 вычитает из значения сигнала блока усилителя 12 значение сигнала блока вычисления скорости 8 и передает вычисленное значение блоку регулятора скорости 13. Блок регулятора скорости 13 вычисляет момент задания на основании алгоритма ПИ регулятора и передает вычисленное значение на положительный вход сумматора корректировки 14. Блок сумматора корректировки 14 вычитает из значения момента ПИ регулятора скорости выходное значение блока однократного воздействия 6 и передает его на вход блока переключения 5. Блок переключения 5 принимает сигнал о наличии избыточного скольжения и передает выходное значение блока сумматора корректировки 14 системе векторного управления с широтно-импульсной модуляцией 3.
Таким образом, предлагаемый способ защиты от боксования электроподвижного состава с асинхронными тяговыми, позволяет предотвратить развитие процесса избыточного скольжения выше допустимой величины путем однократного сброса момента равному десяти процентов от прямого момента задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2023 |
|
RU2821345C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2024 |
|
RU2840243C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2021 |
|
RU2758797C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2741851C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2019 |
|
RU2720864C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ БОКСОВАНИЯ И ЮЗА КОЛЕСНО-МОТОРНЫХ БЛОКОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2364525C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
Изобретение относится к управлению тяговой системой транспортных средств с электротягой. Способ защиты от боксования электроподвижного состава с асинхронными тяговыми двигателями заключается в том, что задают прямой момент задания для асинхронного тягового двигателя, измеряют текущую угловую частоту вращения вала асинхронного тягового двигателя и текущую линейную скорость локомотива, переводят угловую частоту вращения вала двигателя в окружную скорость колесной пары, сравнивают текущую окружную скорость колесной пары и текущую линейную скорость локомотива. При отсутствии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, определяют задающее воздействие, равное прямому моменту задания. При наличии разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива производят переключение задающего воздействия с управления прямым моментом задания на момент, формируемый ПИ-регулятором скорости, с обратной связью по окружной скорости колесной пары, причем из значения момента, сформированного ПИ-регулятором скорости, однократно вычитают значение, равное десяти процентам от значения прямого момента задания. Технический результат заключается в повышении тяговых свойств электроподвижного состава. 1 ил.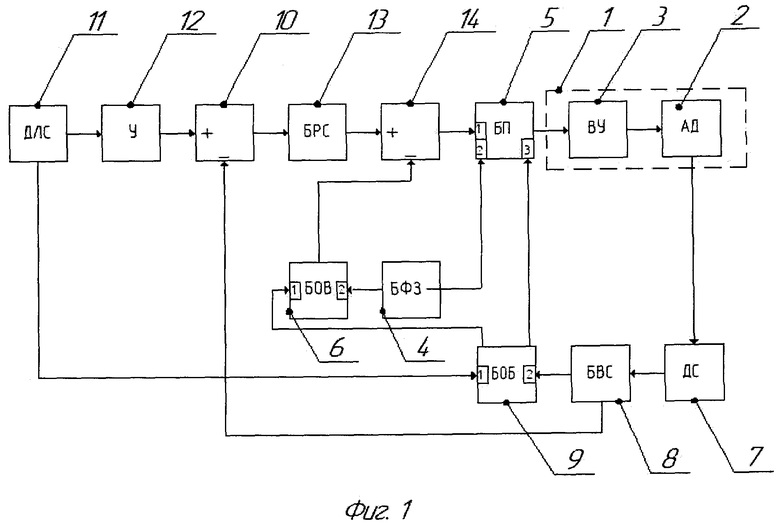
Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями, заключающийся в том, что формируют прямой момент задания как задающее воздействие асинхронного тягового двигателя, измеряют текущую линейную скорость локомотива и текущую угловую частоту вращения вала асинхронного тягового двигателя, переводят угловую частоту вращения вала асинхронного тягового двигателя в окружную скорость колесной пары, сравнивают текущую окружную скорость колесной пары и текущую линейную скорость локомотива, в случае отсутствия разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, определяют задающее воздействие для асинхронного тягового электродвигателя, равное прямому моменту задания, а в случае наличия разницы между окружной скоростью колесной пары и текущей линейной скоростью локомотива, характеризующей повышенное скольжение колесной пары, производят переключение задающего воздействия с управления прямым моментом на момент, формируемый ПИ-регулятором, с обратной связью по окружной скорости колесной пары, отличающийся тем, что из значения момента, сформированного ПИ-регулятором, однократно вычитают значение, равное десяти процентам от значения прямого момента задания.
| EP 0218839 B1, 19.03.1992 | |||
| EP 3680123 A1, 15.07.2020 | |||
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2021 |
|
RU2758797C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
