Изобретение относится к разработке систем телеуправления ракетами и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах.
Одной из задач, решаемых при разработке систем управления, является задача управления ракетой в условиях кратковременного нарушения выделения ее координат при попадании в ее информационное поле управления другой ракеты, возникающем в случае стрельбы с двух носителей по близкорасположенным целям с пересечением линий визирования целей.
Известен способ формирования команд управления вращающейся ракетой, например, в противотанковом комплексе Милан, заключающийся в измерении отклонения от линии визирования элемента конструкции ракеты (трассера), формировании по измеренным отклонениям сигнала, пропорционального координатам ракеты относительно линии визирования, формировании сигналов управления и подачи их в электромагнитное устройство [1].
Недостатком известного способа является возможный срыв управления ракетой при попадании в информационное поле пусковой установки сигнала трассера другой ракеты.
Наиболее близким по технической сущности к изобретению является способ формирования команд управления вращающийся ракетой, наводящейся по лучу [2], заключающийся в приеме и преобразовании модулированного лазерного излучения в электрический сигнал, формировании сигналов, определяющих координаты ракеты относительно оси луча, преобразовании этих сигналов из неподвижной системы координат в систему координат, связанную с ракетой, и преобразовании сигналов управления в отклонение рулей.
Наиболее близким по технической сущности для осуществления данного способа является устройство формирования команд управления вращающейся ракетой, наводящейся по лучу, содержащее последовательно соединенные аппаратуру выделения координат (АВК), блок формирования команд управления (БФК) или корректирующий фильтр, суммирующее устройство, ко второму входу которого подключен блок компенсации динамической ошибки наведения, и рулевой привод (см. Техническое описание и инструкцию по эксплуатации на выстрел ЗУБК 20).
Недостатком данного способа и устройства является частичное или полное разрушение сигналов управления ракетой при наложении идентичных оптических лучей и, как следствие, одно из следующих событий:
выход ракет из обоих лучей;
врезание ракеты в землю;
переход ракеты в луч соседнего комплекса;
продолжение полета в своем луче.
При этом имеют место:
срыв выполнения боевой задачи (не поражена ни одна из целей);
поражение хотя бы одной из целей одной или двумя ракетами;
поражение обеих целей.
Целью изобретения является повышение точности наведения каждой из ракет на свою цель в условиях наложения двух оптических лучей одного кода.
Поставленная цель достигается за счет того, что в способе формирования команд управления вращающейся ракетой, наводящейся по лучу, заключающемся в приеме и преобразовании модулированного лазерного излучения в электрический сигнал, формировании сигнала, пропорционального отклонению ракеты относительно оси луча, формировании сигналов управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера, в систему координат, связанную с вращающейся ракетой, и преобразовании сигналов управления в отклонение рулей, сигнал управления ограничивают на уровне hл•K, начиная с момента времени tпп=(3...5)/Fр, где hш - ширина луча; K - коэффициент передачи аппаратуры управления, обеспечивающий требуемую устойчивость управления ракетой; fр - собственная частота ракеты.
Сущность изобретения состоит в следующем. Пусть σш - среднеквадратическое отклонение (С. К.О.) шума, возникающего на выходе аппаратуры выделения координат в зоне наложения лучей (см. фиг. 1).
Тогда С.К.О. шума на выходе рулевого привода имеет вид:
σδ= σш•mф•kик•k1,
где
mф - интегральный коэффициент усиления помех корректирующим фильтром; ,
,
где
Sвх - спектр колебаний оси луча;
Wф(jw) - передаточная функция замкнутого контура управления;
mф = 4...8 и зависит от характеристик планера ракеты;
Kик - коэффициент передачи исполнительно-корректирующего участка аппаратуры управления;
Kик=K/(Kпх•Kа),
где
Kпх - коэффициент крутизны пеленгационной характеристики луча;
Ka - коэффициент передачи аппаратуры выделения координат;
K1 - коэффициент статистической линеаризации звена, описывающего рулевой привод, с ограничением выходного сигнала на уровне mδδmax, где mδ≤ 1.
Подставляя Kик, имеет:
σδ= σш•mф•k1•K/(kпх•ka),
где
k1= 2Ф[δmax•mδ/(σш•mф•kпх•ka)];
Ф - табличная функция распределения.
Отсюда следуют пути уменьшения σδ, кроме тривиального уменьшения σш:
увеличение коэффициента Kпх, Kа - при соответствующем уменьшении кпр;
уменьшение mф или mδ.
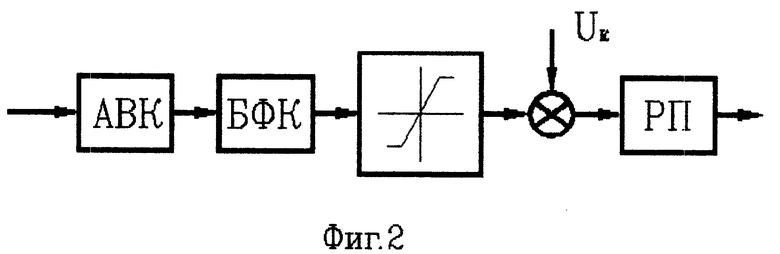
При увеличении Kпх, Kа по сравнению с традиционно определяемыми значениями линейная зона либо информационного луча, либо АВК сокращается. Уменьшение mδ фактически означает ограничение на некотором уровне команд управления, пропорциональных координатам ракеты в луче. При этом ограничение должно вводиться до точки суммирования сигналов координат с сигналами, независимыми от координат (командами компенсации возмущений Uл, см. фиг. 2).
Таким образом, реальным путем изменения шума на выходе рулевого привода является сокращение линейной зоны в системе управления (луче или АВК) и введение ограничения сигналов управления:
mδ= hл•K/δmax ,
где
δmax - максимальный угол поворота рулей.
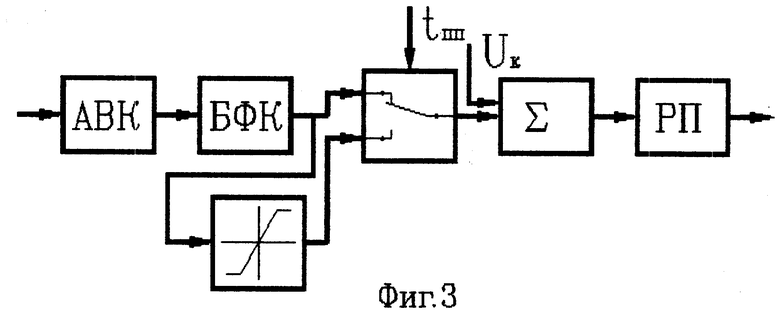
Отметим, что поскольку наложение лучей происходит на участке полета, удаленном от точки пуска ракеты на расстояние, как правило, соизмеримое с половиной расстояния до цели (целей), введение ограничения mδ в аппаратуре управления целесообразно приводить после окончания времени переходного процесса tпп выведения ракеты на программируемую траекторию.
В этом случае предпочтительным является программное переключение структуры аппаратуры управления спустя время tпп после старта, представленной на фиг. 3.
Рассмотрим пример, иллюстрирующий эффект снижения чувствительности аппаратуры управления к помехам, возникающим при наложении лучей, при введении ограничения mδ и без него.
Для аппаратуры управления в варианте без ограничения mδ и σш= 0,5 м а. (метров аппаратурных), ка =3•2o/м а., δmax= 16° имеем σδ= 7,1°, δα= 22° (С. К.О. углов атаки-скольжения).
В варианте с ограничением mδ= 3 имеем σδ= 3,6° , δα= 10° , то есть введение ограничения позволяет существенно уменьшить С.К.О. шумов на выходе рулевого привода и, как следствие, С.К.О. колебаний ракеты.
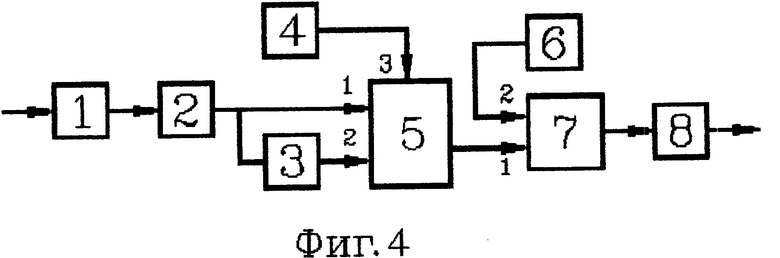
Поставленная цель достигается также тем, что в устройство формирования сигналов управления ракетой, включающее последовательно соединенные аппаратуру выделения координат, блок формирования команд управления, суммирующее устройство, ко второму входу которого подключен блок компенсации динамической ошибки наведения, и рулевой привод, введены ограничитель команд управления, вход которого подключен к выходу БФК, датчик временного интервала и коммутирующее устройство, первый и второй входы которого подключены соответственно к выходу БФК и ограничителю команд управления, а выход - к первому входу сумматора, а его управляющий вход подключен к датчику временного интервала.
На фиг. 4 приведена блок-схема устройства, реализующего предлагаемый способ, где 1 - аппаратура выделения координат; 2 - блок формирования команд управления; 3 - ограничитель команд управления; 4 - датчик временного интервала; 5 - коммутирующее устройство; 6 - блок компенсации динамической ошибки наведения; 7 - суммирующее устройство; 8 - рулевой привод.
АВК, БФК, блок компенсации динамической ошибки и суммирующее устройство могут быть выполнены, например, по схеме, предоставленной в литературе [2]. Ограничитель команд управления может быть выполнен, например, по схеме, представленной в литературе Марше Ж. Операционные усилители и их применение. Л. : Энергия, 1974, с. 68, рис. 5.22. Датчик временного интервала может быть выполнен, например, по схеме, представленной в литературе Ерофеева И.А. Импульсные устройства на однопереходных транзисторах. М.: Связь, 1974, с. 49, рис. 4.5. Коммутирующее устройство может быть выполнено, например, на микросхеме К590КН7.
Устройство работает следующим образом. Сигналы, определяющие координаты отклонения ракеты относительно оси луча лазера, формируемые АВК 1, поступают в БФК 2, где формируются сигналы управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера в систему координат, связанную с вращающейся ракетой. Сформированный БФК сигнал управления поступает одновременно на вход коммутирующего устройства 5 и ограничителя команд управления 3, который в течение времени tпп отключен от входа коммутирующего устройства. С выхода коммутирующего устройства сигнал управления поступает на первый вход сумматора 7, где он суммируется с сигналом, поступающим с блока компенсации динамической ошибки наведения, после чего суммарный сигнал поступает на вход рулевого привода 8, где преобразуется в угловое отклонение рулей.
Спустя время tпп, на управляющий вход 3 коммутирующего устройства подается электрический сигнал с датчика временного интервала 4. При этом коммутирующее устройство отключает сигнал управления, поступающий до момента времени tпп и подключает сигнал с выхода ограничителя 3. Ограниченный на уровне mδ= hл•K/δmax сигнал управления поступает через коммутирующее устройство на вход рулевого привода.
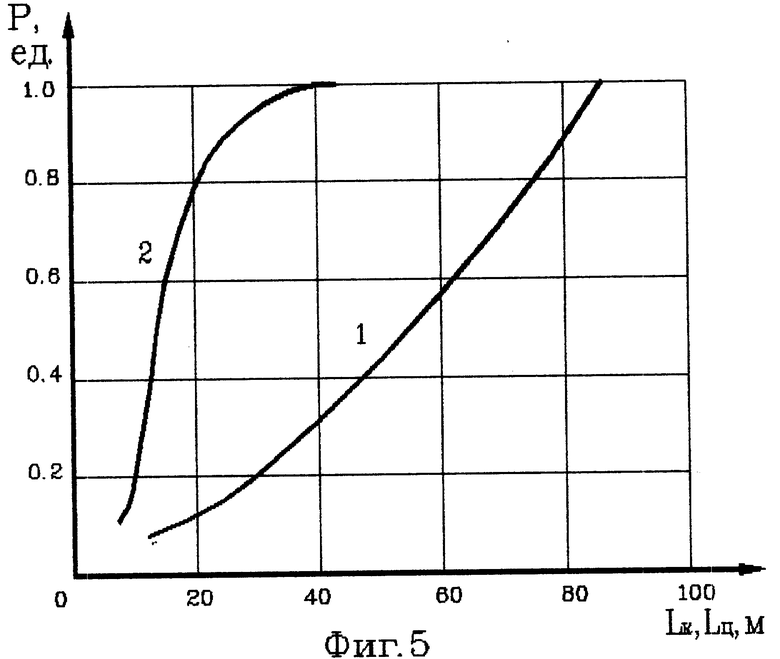
Некоторые результаты моделирования стрельбы двух ракет по двум целям при пересечении осей информационных лучей систем управления приведены на фиг. 5, где 1 - вероятность попадания каждой ракеты в "свою" цель при традиционном формировании аппаратуры управления; 2 - вероятность попадания при введении в аппаратуру управления ограничения
mδ= hл•K/δmax;
где
Lц - расстояние между целями;
Lк - расстояние между комплексами.
Таким образом, моделирование показало, что предлагаемый способ и устройство позволяет обеспечить вероятность попадания каждой ракеты в свою цель при пересечении осей лучей одного кода соседних носителей на уровне, соответствующем стрельбе каждого комплекса, без помех со стороны соседнего комплекса, при расстояниях между носителями не менее, чем предусмотренные по правилам выполнения стрельб.
Источники информации
1. Зарубежное военное обозрение, 1973 г., N 11, с. 31-34.
Выстрел ЗУБК20 с управляемой ракетой 9М119М. Техническое описание и инструкция по эксплуатации ЗУБК20.00.00.000.ТО, инв. 3992цк.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339893C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 1984 |
|
SU1839988A1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
Изобретение относится к оборонной технике и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах. Задачей изобретения является повышение точности наведения на цель в условиях наложения двух оптических лучей одного кода. Это достигается тем, что в способе формирования команд управления вращающейся ракетой, наводящейся по лучу, сигнал управления ограничивают на уровне h • К, начиная с момента времени t = (3...5)/fp , где hл - ширина луча, К - коэффициент передачи аппаратуры управления, обеспечивающий требуемую устойчивость управления ракетой, fp - собственная частота ракеты. Устройство формирования сигналов управления ракетой, включающее последовательно соединенные аппаратуру выделения координат, блок формирования команд управления (БФК), суммирующее устройство, ко второму входу которого подключен блок компенсации динамической ошибки наведения, в рулевой привод введены ограничитель команд управления, вход которого подключен к выходу БФК, датчик временного интервала и коммутирующее устройство, первый и второй входы которого подключены соответственно к выходу БФК и ограничителю команд управления, а выход - к первому входу сумматора, а его управляющий вход подключен к датчику временного интервала. Способ позволяет обеспечить вероятность попадания каждой ракеты в свою цель при пересечении осей лучей одного кода соседних носителей на уровне, соответствующем стрельбе каждого комплекса без помех со стороны соседнего комплекса при расстояниях между носителями не менее, чем предусмотренные по правилам выполнения стрельб. 2 с.п.ф-лы, 5 ил.
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| РАЗРЯДНАЯ ТРУБКА | 1925 |
|
SU3992A1 |
