Область техники
Настоящее изобретение относится к способу контроля широкого изделия или более конкретно к способу комбинирования данных отдельных изображений, захваченных множеством съемочных камер.
Предшествующий уровень техники
До настоящего времени предлагались различные способы контроля поверхности, предназначенные для обнаружения наличия разного рода дефектов или трещин, например загрязнений, пустот, неправильного цвета, неравномерность цвета и т.п., на поверхности изделия, имеющего форму непрерывного или дискретного листа или плиты. Некоторые способы контроля позволяют определять размеры таких дефектов на поверхности. Эти способы используются в различных областях для различных применений.
В устройстве для контроля поверхности часто используют снимающую камеру, например камеру с линейным ПЗС-сенсором, цветную камеру с тремя линейными ПЗС-сенсорами, камеру с двухмерным ПЗС-сенсором, которые предназначены для сканирования поверхности изделия, которое перемещается непрерывно или периодически в заранее определенном направлении. Когда для контроля широкого изделия используется единственная камера, она должна быть установлена на некотором расстоянии от контролируемой поверхности, достаточно большом, чтобы охватить весь контролируемый участок. Однако чем дальше камера устанавливается от контролируемой поверхности, тем меньше ее разрешение. Кроме того, на качество изображения, сканируемого камерой, легко оказывает влияния даже малейшее перемещение или вибрация камеры. Размещение камеры на большом расстоянии от изделия неизбежно ведет к увеличению габаритов устройства. Поэтому требуемая точность контроля не может быть достигнута при использовании единственной съемочной камеры.
Для преодоления этой проблемы было предложено устройство контроля, в котором используется множество съемочных камер, расположенных в одну линию и разнесенных относительно друг друга вдоль ширины изделия так, что каждая камера перекрывает выделенный ей участок всего контролируемого диапазона изделия. Такое устройство раскрыто, например, в опубликованных выложенных японских заявках на патент №№ Н4-166749, Н8-281920 и 2001-337042. Также хорошо известны способы и устройства для комбинирования данных отдельных изображений от индивидуальных съемочных камер и вывода комбинированного изображения на единственный дисплей. Однако как следует из публикации №2001-337042, возникают трудности при точном расположении и наладке множества съемочных камер так, чтобы любые две соседние камеры охватывали свои соответствующие участки контроля без того, чтобы эти участки частично не перекрывали друг друга или без того, чтобы не возникали участки, не охваченные ни одной из соседних камер.
В вышеупомянутой публикации №Н8-281920 раскрыто расположение камер с линейным сенсором, причем две соседние камеры охватывают общий контролируемый участок заранее определенного размера, который перекрывается частями соответствующих контролируемых участков двух соседних камер. В устройстве контроля, имеющем такое расположение камер, данные для изображений контролируемой поверхности изделия, полученные двумя отдельными камерами, требуют обработки для комбинирования данных изображения, чтобы они соответствовали реальному изображению поверхности, отсканированному камерами с линейными сенсорами. Комбинирование отдельных изображений может выполняться, например, путем усреднения данных изображения, передаваемых от двух камер, сравнения данных от этих камер и принятия, предпочтительно, например, данных большей величины или принятия предпочтительно любых из заранее определенных данных и т.д.
Чтобы данные изображений, полученные от двух разных камер, могли обрабатываться для получения соответствующей комбинации данных изображения, размер контролируемого участка, который перекрывается контролируемыми участками двух соседних камер с линейными сенсорами, должен соответственно рассчитываться при каждом цикле контроля или сканирования, осуществляемого камерами с линейными сенсорами. Если положение контролируемого участка на поверхности широкого изделия относительно камер с линейными сенсорами все время остается постоянным, то вышеуказанный размер перекрывающего участка можно легко рассчитать и его можно использовать как заранее определенный эталонный размер для обработки данных изображения.
Однако если положение контролируемой поверхности относительно камер с линейным сенсором время от времени изменяется в зависимости от состояния широкого изделия, размер перекрывающего контролируемого участка также становится переменным и, следовательно, данные изображения контролируемой поверхности широкого изделия могут не соответствовать реальному состоянию поверхности, отсканированной камерами с линейными сенсорами.
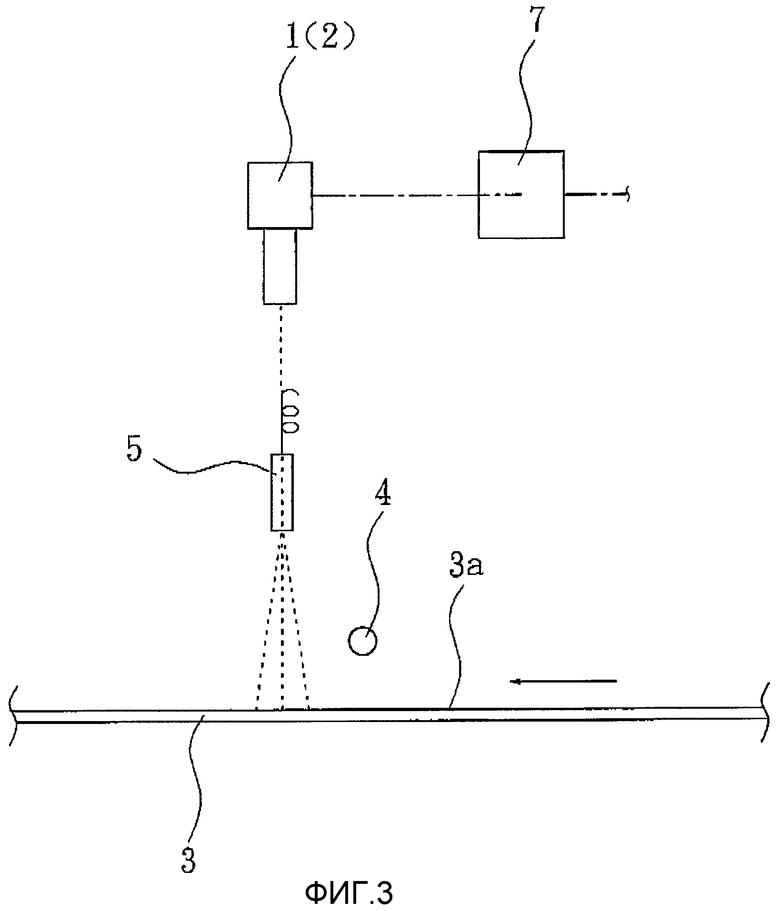
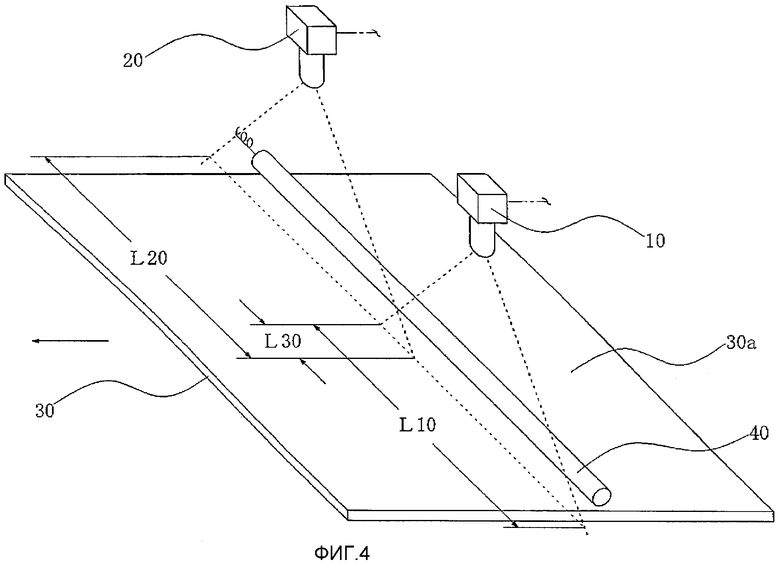
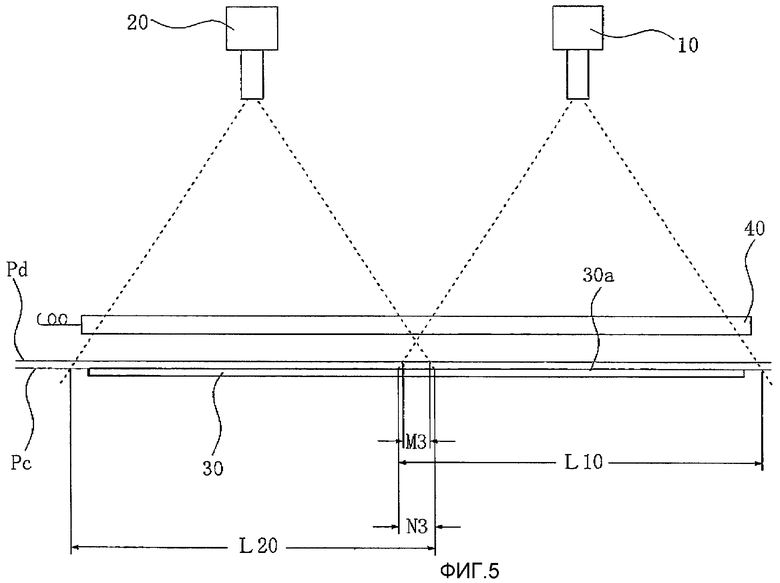
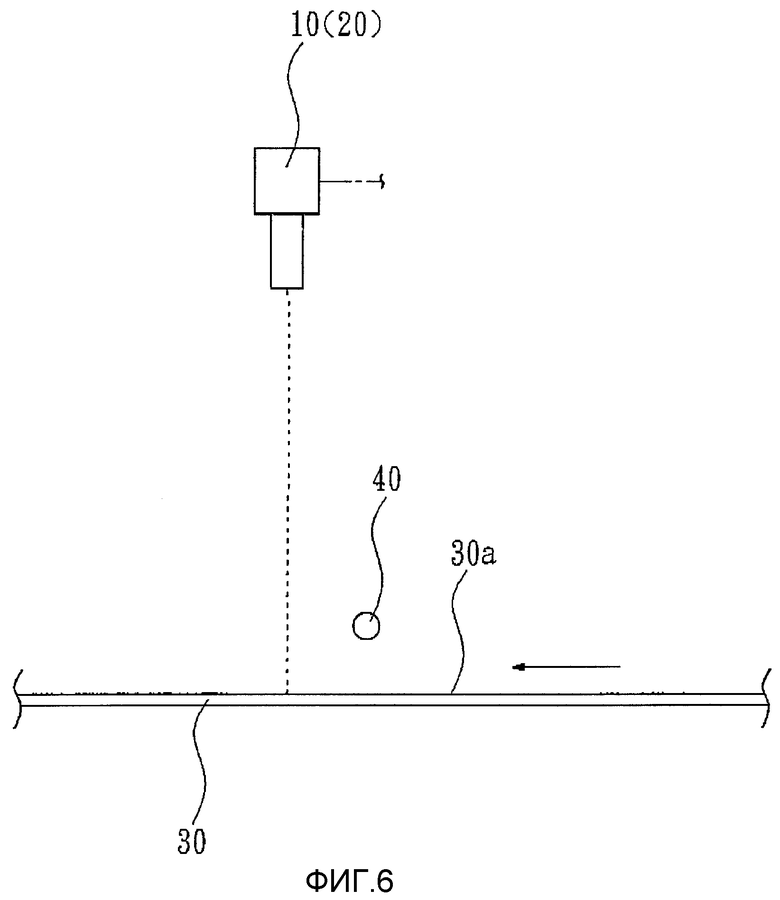
Для лучшего понимания предпосылок создания настоящего изобретения прилагаются фиг.4-6, схематически показывающие устройство, которое обычно используется для осуществления способа контроля широких изделий. На чертежах позицией 30 обозначено изделие, имеющее широкую поверхность 30а, которая контролируется парой камер 10, 20 с линейными сенсорами, которые расположены над контролируемой поверхностью 30а изделия 30 и ориентированы перпендикулярно к ней. Изделие 30 транспортируется в направлении, показанном стрелкой, как показано на фиг.4, 6, и ее контролируемая поверхность 30а обычно находится в положении или на высоте, обозначенной линией Рс на фиг.5. Две камеры 10, 20 с линейными сенсорами расположены над контролируемой поверхностью 30а и разнесены друг от друга вдоль ширины изделия 30 так, что камеры 10, 20 охватывают свои контролируемые участки L10, L20 соответственно, и имеют общий контролируемый участок L30, который перекрывается соответствующими контролируемыми участками L10, L20. Перекрытый контролируемый участок L30 имеет заранее определенный размер N3, когда контролируемая поверхность 30а расположена в положении Рс. Позицией 40 обозначена лампа для освещения контролируемых участков L10, L20, L30 и расположенных рядом с ними областей. Для упрощения описания устройство для обработки данных изображения, передаваемых камерами 10, 20, на чертежах не показано.
В указанном устройстве контроля, поскольку изделие 30 перемещается так, что его контролируемая поверхность 30а находится в положении Рс, размер фактического перекрытого контролируемого участка L30 камер 10, 20 совпадает с вышеупомянутым размером N3 и поверхность 30а изделия 30 правильно контролируется камерами 10, 20 с линейными сенсорами. Однако если изделие 30 перемещается в приподнятом положении, когда контролируемая поверхность 30 находится в приподнятом положении или на высоте Pd, размер фактического контролируемого участка L30 (фиг.5), перекрытого контролируемыми участками L10, L20 камер 10, 20 с линейными сенсорами, не совпадает с заранее определенным размером N3, причем размер М3 фактического перекрытого участка L30 меньше, чем заранее определенный размер N3. С другой стороны, если изделие 30 перемещается так, что контролируемая поверхность 30а находится ниже, чем Рс, размер перекрываемого в этом случае участка L30 становится больше, чем N3.
В опубликованной выложенной японской заявке на патент №2000-349988 на устройство для комбинирования сигналов изображения предлагается решение вышеописанной проблемы. Согласно изобретению, раскрытому в этой публикации, в положении вверх по ходу движения широкого изделия или стальной плиты от линейных сенсоров установлен датчик расстояния, который выполнен с возможностью измерения относительного расстояния между контролируемой поверхностью стальной плиты и линейными сенсорами. Устройство содержит вычислительное средство для расчета контролируемого участка, который перекрыт соответствующими контролируемыми участками любых двух соседних линейных сенсоров, на основе измеренного расстояния. Вычислительное средство также выполнено с возможностью рассчитывать изменения перекрываемого участка, которые могут быть вызваны любым смещением контролируемой поверхности плиты, и корректировать и комбинировать полученные при контроле данные от сенсоров на основе результатов расчетов.
Такой способ контроля может быть использован преимущественно при контроле плоского материала, имеющего заданную толщину, например стальной плиты. Более конкретно этот способ может эффективно работать при контроле стальных плит разных партий, где каждая партия содержит множество плит одинаковой толщины, поскольку измерение относительного расстояния между контролируемой поверхностью плиты и линейными сенсорами и последующий расчет контролируемого участка, перекрытого соответствующими контролируемыми участками любых двух соседних линейных сенсоров, на основе измеренной величины производится только один раз для каждой партии. Дополнительно согласно этому способу контроля возникает очень небольшая ошибка между фактическим перекрытым участком и рассчитанным перекрытым участком.
Однако способ контроля по публикации №2000-349988 является затратным, поскольку в устройстве для реализации этого способа использован прибор для измерения расстояния между контролируемой поверхностью стальной плиты и линейными сенсорами, а также устройство для расчета контролируемого участка, перекрытого соответствующими контролируемыми участками любых двух соседних линейных сенсоров на основе этих измерений. Этот способ также обладает недостатками при контроле таких изделий, как древесные фанерованные плиты, верхняя поверхность которых часто является волнистой, поскольку рассчитанная величина перекрытого контролируемого участка часто не совпадает с величиной фактического контролируемого участка. Для точного контроля изделия, которое движется непрерывно, расчет перекрываемого контролируемого участка нужно повторять через короткие временные интервалы. Для осуществления точного контроля может возникнуть необходимость снижения скорости транспортировки изделия, что повлияет на эффективность контроля.
Краткое изложение существа изобретения
Настоящее изобретение направлено на устранение вышеописанных недостатков и, следовательно, задачей настоящего изобретения является создание способа контроля широкого изделия, который обеспечивает устранение этих недостатков. Более конкретно предлагается способ комбинирования данных отдельных изображений поверхности широкого изделия, полученных множеством съемочных камер.
Для решения указанной задачи согласно настоящему изобретению предложен способ контроля с использованием множества съемочных камер изделия, имеющего широкую контролируемую поверхность и перемещающегося в направлении, поперечном его ширине. Согласно этому способу, во-первых, снимающие камеры расположены на расстоянии от контролируемой поверхности изделия и разнесены друг от друга с определенным интервалом вдоль ширины изделия так, что съемочные камеры имеют контролируемый участок на контролируемой поверхности, и любые две соседние съемочные камеры имеют общий контролируемый участок, который перекрывается частями контролируемых участков двух соседних съемочных камер. Съемочные камеры предпочтительно являются съемочными камерами с линейным сенсором, которые выполнены с возможностью последовательно принимать или захватывать линейное изображение контролируемой поверхности и соответственно генерировать данные изображения.
Контролируемые участки и расположенные рядом с ними области контролируемой поверхности широкого изделия освещены лампой. В промежуточное положение в перекрываемом общем контролируемом участке наносится метка путем излучения света от светового прожектора. Линейная метка имеет цвет, отличающийся от любого цвета, включенного в контролируемую поверхность широкого изделия. Световым прожектором может быть лазер, излучающий лазерный луч, который создает линейную метку, проходящую поперек перекрытого общего контролируемого участка. Дополнительно линейная метка должна наноситься в центре перекрытого общего контролируемого участка.
Данные изображения, генерируемые двумя соседними съемочными камерами, комбинируют друг с другом путем расчетов. При комбинировании данных изображения часть данных изображения, захваченного одной из двух соседних съемочных камер, и часть данных изображения, захваченного другой съемочной камерой, исключаются на основании метки так, что контролируемые участки двух соседних съемочных камер охватывают комплементарно весь контролируемый участок.
Иными словами, данные изображения, генерируемые двумя соседними съемочными камерами для перекрытого общего контролируемого участка, комбинируются друг с другом путем расчетов таким образом, что часть данных изображения, захваченного одной из двух соседних съемочных камер, соответствующая контролируемому участку между меткой и одним краем контролируемого участка одной камеры на стороне, примыкающего к контролируемому участку другой камеры, а также часть данных изображения, захваченного другой камерой съемочной камерой, соответствующая контролируемому участку между указанной меткой и одним краем контролируемого участка этой второй камеры на стороне, примыкающей к контролируемому участку первой камеры, исключаются из комбинации данных изображения.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения станут более понятны из нижеследующего описания предпочтительного варианта воплощения изобретения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает общий вид (схематически) устройства контроля широких изделий для реализации способа контроля широких изделий согласно изобретению;
Фиг.2 - схематический вид спереди устройства контроля согласно изобретению;
Фиг.3 - схематический вид сбоку устройства контроля согласно изобретению;
Фиг.4 - схематический общий вид известного устройства контроля, обычно применяемого для реализации способа контроля широких изделий;
Фиг.5 - схематический вид спереди известного устройства контроля;
Фиг.6 - схематический вид сбоку известного устройства контроля.
Подробное описание предпочтительного варианта реализации изобретения
Ниже следует описание предпочтительного варианта способа контроля широкого изделия согласно настоящему изобретению и устройства контроля, позволяющего реализовать указанный способ контроля. Для упрощения будет описан вариант устройства, в котором используется только пара съемочных камер с линейным сенсором.
Устройство для контроля широких изделий содержит пару камер 1, 2 с линейным сенсором, каждая из которых выполнена с возможностью последовательного захвата линейного изображения поверхности, расположена над изделием 3, имеющим широкую поверхность 3а, которая контролируется камерами 1, 2 и транспортируется любым подходящим средством в направлении, показанном стрелкой на фиг.1, 3. При этом контролируемая поверхность 3а обычно расположена на высоте, показанной линией Ра на фиг.2. Две камеры 1, 2 (фиг.1) с линейным сенсором расположены на одной линии, проходящей в направлении ширины широкого изделия 3 и ориентированы по существу перпендикулярно к контролируемой поверхности 3а. Камеры 1, 2 разнесены друг от друга вдоль ширины изделия 3 так, что камеры 1, 2 охватывают контролируемые участки L1, L2 соответственно и имеют общий контролируемый участок L3, который перекрывается частями соответствующих контролируемых участков L1, L2 и имеет заранее определенный размер N (фиг.2) или соответствующее ему количество пикселей. Осветительная лампа 4 расположена над контролируемой поверхностью 3а рядом с ней для освещения контролируемых участков L1, L2, L3 и областей, примыкающих к ним.
Световой прожектор 5 расположен над изделием 3 в положении между соседними камерами 1, 2 с линейными сенсорами (как видно сверху) для излучения света в центр перекрытого контролируемого участка L3 на контролируемой поверхности 3а широкого изделия 3 так, чтобы метка 6 в форме отрезка прямой линии появилась при прохождении через перекрываемый участок L3 (фиг.1). Линейная метка 6 должна иметь цвет, отличающийся от любого цвета, имеющегося на контролируемой поверхности 3а. Фактические размеры перекрытого участка L3 на контролируемой поверхности 3а изделия 3 определяются расчетом, основанным на данных изображения, переданных от камер 1, 2 с линейными сенсорами, проводимым устройством 7 обработки данных, которое направляет обработанные данные на устройство контроля (не показано).
Ниже следует подробное описание расчета для комбинирования данных изображений для перекрытого контролируемого участка L3, захваченных двумя камерами 1, 2 с линейными сенсорами. Как указано выше, камеры 1, 2 с линейными сенсорами установлены так, что имеют собственные контролируемые участки L1,L2 и имеют общий перекрытый участок L3, имеющий заранее определенный размер N, или соответствующее количество пикселей, когда широкое изделие 3 перемещается и его контролируемая поверхность находится в положении Ра.
В каждый момент сканирования контролируемой поверхности 3а изделия 3 камерами 1, 2 с линейными сенсорами камера 1, расположенная справа, если смотреть спереди на фиг.2, обнаруживает линейную метку 6 в положении, расположенном внутри от левого края контролируемого участка L1 на расстоянии N1, а камера 2 на противоположной левой стороне обнаруживает эту же линию 6 в положении внутри от правого края ее контролируемого участка L2 на расстоянии N2. При комбинировании данных изображения от двух камер 1, 2 с линейными сенсорами для перекрытого контролируемого участка L3 часть данных изображения, захваченного камерой 1, соответствующая участку, проходящему на расстоянии N1 на фиг.2, и также часть данных изображения, захваченного второй камерой 2, соответствующая участку, проходящему на расстоянии N2 на фиг.2, исключаются из расчета комбинации данных изображения так, что весь контролируемый участок при каждом сканировании охвачен комплементарно контролируемыми участками двух соседних камер. Путем такого комбинирования данные изображения, выдаваемые двумя отдельными камерами 1, 2 с линейными сенсорами для перекрытого участка L3, не содержат общих данных и комбинирование данных изображений, переданных двумя камерами 1, 2 с линейными сенсорами для перекрытого участка L3, можно выполнять легко и быстро.
С другой стороны, когда широкое изделие 3 имеет иную толщину или волнистую поверхность, так что контролируемая поверхность 3а изделия 3 перемещается на увеличенной высоте, обозначенной Pb, камера 1 обнаруживает линейную метку 6 в положении, расположенном внутри от левого края ее контролируемого участка L1 на расстоянии М1, а камера 2 обнаруживает ту же метку 6 в положении внутри от правого края ее контролируемого участка L2 на расстоянии М2. Для комбинирования данных изображений от камер 1, 2 с линейными сенсорами для перекрытого участка L3 часть данных изображения, захваченного камерой 1, соответствующая участку, проходящему на расстоянии М1, и часть данных изображения, захваченного второй камерой 2, соответствующая участку, проходящему на расстоянии М2, исключаются из комбинирования данных изображений перекрытого контролируемого участка L3.
Очевидно, что вышеописанный способ комбинирования данных изображения перекрытого контролируемого участка L3 может быть применен, когда изделие 3 перемещается так, что его контролируемая поверхность 3а расположена в положении, отличающемся от положений Ра, Pb.
При контроле поверхности 3а широкого изделия 3, которое перемещается в направлении, показанном стрелкой, данные линейных изображений, принятых камерами 1, 2 с линейными датчиками, немедленно обрабатываются для их комбинирования так, чтобы состояние контролируемой поверхности 3а можно было проверять точно и своевременно.
Хотя выше приведено описание конкретного варианта настоящего изобретения, следует понимать, что настоящее изобретение не ограничено проиллюстрированным вариантом, но может реализовываться с различными изменениями и модификациями, как поясняется ниже.
В вышеописанном варианте использованы только две камеры 1, 2 с линейными датчиками, но для контроля поверхности 3а широкого изделия 3 могут использоваться три и более камеры. В таком случае следует использовать два и более прожекторов 5 для создания меток 6 в центрах соответствующих перекрытых контролируемых участков, которые перекрываются контролируемыми участками любых двух соседних камер с линейными сенсорами.
В вышеописанном варианте прожектор 5 расположен так, чтобы линейная метка 6 появлялась в центре перекрытого участка L3, но метка 6 не обязательно должна находиться в центре перекрытого участка L3, она может быть в любом положении, находящемся в любом промежуточном месте внутри перекрытого контролируемого участка. В таком случае части данных изображения для выполнения расчета выбирают на основе этой промежуточной метки так, чтобы контролируемые участки двух соседних камер охватывали комплементарно весь контролируемый участок. Для точного контроля перекрытого участка L3 метка 6 в форме короткой линии должна быть как можно тоньше и для этой цели и для хорошей различимости в качестве света должен быть использован красный лазерный луч, излучаемый лазерным прожектором.
Следует отметить, что камеры 1, 2 с линейными сенсорами не обязательно должны быть расположены на одной линии, чтобы их контролируемые участки L1, L2 были точно совмещены друг с другом, но они могут располагаться так, что контролируемые участки L1, L2 были не на одной линии, чтобы упростить монтаж и наладку камер 1, 2 с линейными сенсорами. Следует также отметить, что если контролируемые участки L1, L2 двух камер 1, 2 находятся на одной линии, метка 6, появляющаяся на перекрытом участке L3, может иметь форму точки, расположенной внутри перекрытого участка L3, а не короткой линией, пересекающей этот участок L3.
В качестве съемочной камеры предпочтительно использовать цветную съемочную камеру, благодаря ее способности распознавать и различать цвета. При контроле поверхности изделия, имеющего один цвет или всего несколько цветов, например цветной пленки, для поиска недостатков поверхности можно использовать камеру с монохромным сенсором, которая способна обнаружить линейную метку, яркость которой отличается от яркости контролируемой поверхности.
Хотя на чертежах это не показано, вместо камер с линейными сенсорами для контроля участков на дискретных листах или плитах, которые перемещаются периодически, можно использовать камеры с двухмерными сенсорами. В этом случае линейная метка должна проходить по всей площади в направлении движения листа или плиты.
Если какой-либо дефект на изделии, например раковина или трещина, проходит через положение линейной метки 6, съемочные камеры 1, 2 временно не смогут обнаружить линейную метку 6. Поскольку положение метки не меняется, положение дефекта можно определить по метке ниже или выше по ходу движения от дефекта. Таким образом может выполняться комбинирование данных изображения на основе оценочного положения метки.

Изобретение относится к области контроля поверхностей с использованием множества съемочных камер с линейным сенсором путем комбинирования данных изображения от множества съемочных камер. Камеры с линейными сенсорами располагают относительно контролируемой поверхности широкого изделия так, что съемочные камеры имеют собственные контролируемые участки и общий участок, перекрытый частями контролируемых участков съемочных камер. Лазерный луч проецируют на перекрытый участок так, чтобы в центре перекрытого участка появилась метка, пересекающая этот перекрытый участок. Данные изображений от двух соседних камер комбинируют путем расчета таким образом, что части данных изображений, захваченных двумя соседними камерами, исключают на основе линейной метки так, что контролируемые участки двух соседних камер перекрывают комплементарно весь контролируемый участок. Техническим результатом является повышение эффективности и точности контроля. 2 с. и 5 з.п. ф-лы, 6 ил.
| JP 11183399 А, 09.07.1999 | |||
| Способ оптико-электронного контроля дефектов на движущейся поверхности и устройство для его осуществления | 1991 |
|
SU1796059A3 |
| JP 4166749 А, 12.06.1992 | |||
| JP 2001337042 А, 07.12.2001 | |||
| JP 8281920 A, 29.10.1996. | |||

