Предлагаемое изобретение касается способа изготовления пневматических шин. Более конкретно, это изобретение относится к размещению кордных нитей, предназначенных для формирования усиливающей арматуры пневматической шины. Еще более конкретно, в данном изобретении предлагаются средства, обеспечивающие изготовление такой усиливающей арматуры на сердечнике, имеющем форму, близкую или идентичную форме внутренней полости данной пневматической шины, то есть по существу тороидальную форму, и удерживающем заготовку пневматической шины в процессе ее изготовления.
В данной области техники уже известны способы и устройства, которые позволяют интегрировать процесс изготовления усиливающей арматуры пневматической шины в процесс сборки самой этой пневматической шины. Это означает, что вместо того, чтобы прибегать к использованию усиливающих конструкций в виде слоев, заранее изготовленных в качестве полуфабрикатов, выполняют одну или несколько усиливающих конструкций прямо на месте, в тот момент, когда изготавливают саму эту пневматическую шину, и при помощи одной единственной катушки усиливающей нити.
Среди этих способов и устройств техническое решение, описанное в заявке на патент ЕР 0580055, определенным образом приспособлено для выполнения усиливающих конструкций каркаса на жестком сердечнике, наружная поверхность которого по существу соответствует форме внутренней полости окончательно изготовленной пневматической шины. Здесь описано оборудование, в котором нить, предназначенная для формирования усиливающей конструкции каркаса, укладывается смежными дугами на жестком сердечнике при помощи маленького отверстия или ушка, фиксированного на цепи, смонтированной на роликах таким образом, чтобы охватывать этот сердечник, формируя С-образную конструкцию. Это маленькое отверстие или ушко совершает возвратно-поступательное перемещение вокруг сердечника так, чтобы уложить, постепенно и соприкасающимся образом, одну дугу нити за каждый проход в прямом направлении и одну дугу нити за каждый проход в обратном направлении с использованием соответствующих прижимных устройств, предназначенных для постепенного прижатия концов дуг к жесткому сердечнику, предварительно покрытому сырым (то есть невулканизированным) каучуком.
Из патентной заявки ЕР 0962304 известно оборудование, также предназначенное для выполнения усиливающих конструкций каркаса на жестком сердечнике, наружная поверхность которого по существу соответствует форме внутренней полости окончательно изготовленной пневматической шины. В первом варианте реализации описан единственный качающийся рычаг, конец которого, удерживающий направляющий орган, сопоставимый с упомянутым выше маленьким отверстием или ушком, непременным образом описывает дуги окружности. При этом можно сослаться на фиг.3 упомянутой патентной заявки ЕР 0962304. Проблема, которая возникает в этом случае, состоит в том, что если требуется осуществлять укладку в достаточно быстром темпе, необходимо, чтобы амплитуда углов и характеристические радиусы описываемой дуги окружности были не слишком большими. Необходимо также, чтобы концы этой дуги окружности не были слишком удалены от борта данной пневматической шины, то есть от действительной зоны укладки нити. В противном случае будут возникать большие затруднения в работе прижимных органов и/или пониженная точность укладки нити. Если при этом удалять в направлении больших радиусов геометрическую ось вращения качающегося рычага, то этот рычаг может охватывать данный сердечник, не задевая при этом за него. Это способствует повышению точности укладки, но при этом описываемая дуга окружности становится значительно большей (как по описываемому углу, так и по радиусу) и увеличиваются трудности функционирования данного оборудования в высоком темпе. В качестве вывода можно отметить, что в данном случае важными параметрами функционирования являются положение центра вращения используемого качающегося рычага, описываемый им в процессе качания угол, радиус этого рычага и просвет, который этот рычаг должен обеспечивать по отношению к данному сердечнику по всей своей длине и в любом своем эксплуатационном положении.
Во втором варианте выполнения изобретения по патентной заявке ЕР 0962304 описана система с кулачком и несколькими шарнирно закрепленными качающимися рычагами, причем конец этой системы удерживает направляющий орган, сопоставимый с упомянутым выше ушком, и в данном случае постоянно удерживается в контакте с упомянутым сердечником. При этом можно сослаться на фиг.5 из патентной заявки ЕР 0962304. В данном случае проблема состоит в том, что такое устройство содержит много элементов трения и имеется опасность возникновения повреждения, в частности, в изделиях из сырого каучука, уже нанесенного на поверхность сердечника, тем более значительные, чем в более высоком темпе будет осуществляться функционирование данного устройства.
Задача предлагаемого изобретения состоит в том, чтобы предложить технологическое оборудование, способное функционировать в соответствии с общим способом, описанным в патентной заявке ЕР 0580055, и способное работать в высоком темпе без ущерба для точности функционирования.
Это достигается с помощью устройства для изготовления усиливающей арматуры для пневматической шины, причем упомянутое устройство предназначено для изготовления этой усиливающей арматуры, сформированной из одной нити, подаваемой по потребности, и по существу непрерывно, посредством соответствующего распределительного устройства, а также предназначено для использования совместно с монтажной формой или сердечником, имеющим по существу тороидальную форму, на котором постепенно формируют усиливающую арматуру, укладывая дугами нить вдоль траектории, требуемой для этой нити, на поверхность монтажной формы, а также предназначено для использования совместно с прижимными устройствами, расположенными рядом с каждым концом упомянутой траектории для прижатия этой нити к сердечнику на концах, причем устройство содержит:
- направляющее средство, в котором нить имеет возможность свободно скользить,
- по меньшей мере один рычаг, выполненный с возможностью качения относительно геометрической оси вращения качающегося рычага и содержащий головку, удаленную от его геометрической оси вращения,
- средства управления, предназначенные для придания качающемуся рычагу движения качания вокруг его геометрической оси вращения, причем данное устройство выполнено таким образом, чтобы головка рычага обеспечивала транспортировку направляющего средства непосредственно или косвенно, посредством одного или нескольких других качающихся рычагов,
и отличается тем, что расстояние между головкой по меньшей мере одного рычага и геометрической осью вращения этого рычага является изменяемым.
По сравнению с патентной заявкой ЕР 0580055, в данном изобретении используется не только описанный в этой заявке способ, но также и, в значительной мере, описанные там прижимные устройства, участвующие в обеспечении возможности формирования петли и прижатия петли к сердечнику. Причем каждое из этих прижимных устройств содержит главным образом вилку и элемент прижатия. С точностью до некоторых деталей исполнения пример реализации прижимных устройств, который описан в упомянутой патентной заявке, может быть использован в данном случае практически в том же самом виде, даже если ниже в приведенном описании предлагается новая форма реализации для прижимных устройств.
При этом предлагаемое изобретение вносит принципиальные различия в то, что касается приведения в движение направляющего органа (а именно, органа типа упомянутого ушка), в котором упомянутая нить имеет возможность свободного скольжения. Описанные ниже системы с качающимися рычагами разработаны таким образом, чтобы иметь возможность заменить собой ту цепную систему приведения в движение, которая описана в патентной заявке ЕР 0580055.
Прежде чем приступить к подробному описанию этих новых средств приведения в движение направляющего органа для нити, следует отметить несколько моментов, которые поясняют предлагаемое изобретение.
Прежде всего следует отметить, что, как и в упомянутой выше патентной заявке, термин «нить», разумеется, должен пониматься в самом широком смысле этого слова, охватывающем моноволокно, многоволоконную нить, сборку, такую, например, как кордная нить или крученая нить, или небольшое количество сгруппированных кордных нитей или крученых нитей, причем независимо от характера используемого при этом материала, а также независимо от того, будет эта «нить» предварительно покрыта слоем каучука или не будет иметь такого покрытия.
В предлагаемом здесь описании также используется термин «дуга», применяемый для обозначения участка нити, проходящего от одной особенной точки до другой в рассматриваемой усиливающей арматуре. Совокупность этих дуг, располагающихся на всем периметре данной пневматической шины, образует собственно усиливающую арматуру этой шины. Эта дуга в данном случае может представлять собой часть арматуры каркаса, или часть арматуры для укрепления гребня, или часть усиливающей арматуры любого другого типа. Эти дуги могут быть индивидуализированы путем разрыва нити в процессе ее укладки или же все они могут быть соединены между собой в конечной усиливающей арматуре, например, при помощи петель.
Существенным образом в предлагаемом изобретении речь идет о непрерывной укладке усиливающей нити в конфигурации, возможно более близкой к конфигурации в готовом изделии. Поскольку упомянутая нить подается по потребности при помощи соответствующего распределительного устройства, содержащего, например, катушку с нитью и, в случае необходимости, устройство контроля натяжения нити, снимаемой с катушки, данное устройство изготовления усиливающей арматуры на основе одной единственной нити взаимодействует с шаблоном определенной формы (например, с жестким сердечником или оболочкой), на котором изготавливается данная пневматическая шина. При этом не имеет особенного значения то обстоятельство, будет ли данная усиливающая арматура, для ее полного формирования, изготовлена в результате множества последовательно выполняемых поворотов данного шаблона с разрывом нити или же без разрыва этой нити между двумя такими поворотами.
В том случае, когда в данном описании определяют положения, направления или ориентацию тех или иных элементов при помощи выражений типа «в радиальном направлении», «в осевом направлении», «в окружном направлении», или в том случае, когда говорят о радиусах, за начало отсчета принимают либо монтажную форму или сердечник, на котором изготавливается данная пневматическая шина, либо саму эту пневматическую шину. Кроме того, используемая в качестве опорной геометрическая ось представляет собой ось вращения данной формы.
В дополнение к указанному выше, и как это уже было отмечено в патентной заявке ЕР 0580055, описанные здесь средства укладки нити позволяют также реализовать усиливающую арматуру, например, усиливающую арматуру каркаса, в которой шаг укладки нити является переменным. В данном случае под выражением «шаг укладки» следует понимать расстояние, представляющее собой сумму расстояния, разделяющего две смежные нити, и диаметра этой нити. Хорошо известно, что для усиливающей арматуры каркаса расстояние между нитями изменяется в зависимости от радиуса, на котором это расстояние измеряется. Здесь же речь идет не о таком изменении, а о переменном шаге для данного радиуса. Для этого достаточно, не меняя темпа работы направляющего средства данного устройства, изменять, в соответствии с любым подходящим в данном случае законом, скорость вращения монтажной формы или сердечника. Таким образом можно получить пневматическую шину, у которой усиливающие нити арматуры каркаса, например, для каркаса радиального типа, располагаются с шагом, представляющим контролируемое изменение для данного радиального положения.
Могут быть рассмотрены различные способы реализации предлагаемого изобретения. Из последующего изложения следует, что всякий раз данное устройство заставляет направляющее средство для нити совершать движение, по существу располагающееся в одной плоскости, называемой плоскостью движения и перпендикулярной геометрической оси вращения первого качающегося рычага. При этом данная плоскость движения удалена от первого качающегося рычага, точнее говоря, от вала его вращения. Данное устройство содержит средства управления качающимся рычагом, выполненные таким образом, чтобы придать этому качающемуся рычагу колебательное движение относительно его геометрической оси вращения, причем это устройство выполнено таким образом, чтобы головка рычага транспортировала направляющее средство в соответствии с циклическим движением, совершаемым в одной плоскости движения для перемещения этого направляющего средства последовательными циклами в зону, находящуюся в непосредственной близости от каждого из требуемых концов для нити на ее траектории.
В последующем изложении и в двух способах реализации описаны технические решения, в соответствии с которыми данное устройство содержит второй рычаг, качающийся относительно геометрической оси вращения, причем геометрические оси вращения по существу параллельны между собой, и этот второй качающийся рычаг содержит головку, транспортирующую направляющее средство непосредственно или косвенно, посредством одного или нескольких других рычагов, причем головка первого рычага удерживает геометрическую ось вращения второго рычага. Целесообразно, головка второго рычага удалена в радиальном направлении от геометрической оси вращения этого второго рычага. Следует отметить, что в описанных способах реализации данное устройство предпочтительно содержит средства управления относительным положением второго рычага по отношению к первому рычагу таким образом, чтобы направляющее средство транспортировалось в соответствии с циклическим движением, совершаемым в плоскости движения для перемещения этого направляющего средства в зону, находящуюся в непосредственной близости от каждого из желаемых концов для нити на ее траектории.
Более конкретно, но не внося этим никаких ограничений, можно отметить, что в последующем описании двух упомянутых выше способов реализации показано, что:
- головка второго качающегося рычага искривлена в направлении монтажной формы и непосредственно удерживает направляющее средство таким образом, чтобы приблизить это направляющее средство к монтажной форме, по меньшей мере в конфигурации, принимаемой данным устройством в том случае, когда данное направляющее средство располагается поблизости от конца траектории нити;
- первый качающийся рычаг ориентирован по существу перпендикулярно к своей геометрической оси вращения, причем второй качающийся рычаг имеет по меньшей мере одну промежуточную часть, ориентированную по существу параллельно геометрической оси вращения первого качающегося рычага.
Целесообразно, чтобы основание второго качающегося рычага, включающее геометрическую ось вращения, было расположено по существу перпендикулярно этой геометрической оси вращения.
Целесообразно, чтобы на первом качающемся рычаге удерживалась система шестерен, содержащая первую фиксированную шестерню, центрированную на геометрической оси вращения этого первого рычага, концевую шестерню, центрированную на геометрической оси вращения второго качающегося рычага и жестко связанную с этим рычагом, и промежуточную шестерню, находящуюся в зубчатом зацеплении с первой шестерней и с концевой шестерней.
Целесообразно также, чтобы число зубьев фиксированной шестерни было меньше числа зубьев концевой шестерни и при этом выполнялось соотношение Nf=aNc, причем первый качающийся рычаг совершал колебания с амплитудой α, где этот угол α является положительным в обратном тригонометрическом направлении, а второй качающийся рычаг совершал колебания с амплитудой β=180°-аα вокруг монтажной формы, причем этот угол β являлся бы положительным в тригонометрическом направлении.
Предпочтительно, чтобы число зубьев фиксированной шестерни превышало число зубьев концевой шестерни так, что выполнялось соотношение Nf=aNc, причем первый качающийся рычаг совершал бы колебательные движения с амплитудой α в пространстве с той стороны от своей геометрической оси вращения, которая противоположна монтажной форме, а второй качающийся рычаг при этом совершал колебательные движения с амплитудой β=аα вокруг монтажной формы, причем угол α являлся бы положительными в обратном тригонометрическом направлении и угол β являлся положительными в тригонометрическом н аправлении.
Предпочтительно, что s первый качающийся рычаг удерживал зубчатый приводной ремень, расположенный на первом шкиве, центрированном на геометрической оси вращения этого первого рычага, причем этот первый шкив не являлся бы подвижным по вращательному движению, и на втором шкиве, центрированном на геометрической оси вращения второго качающегося рычага и жестко связанном со вторым рычагом.
Предпочтительно также, чтобы устройство содержало фиксированный кулачок, центрированный на геометрической оси вращения первого качающегося рычага, причем в этом устройстве первый рычаг удерживал бы следящий механизм кулачка, находящийся в механическом контакте с рабочей поверхностью кулачка, причем этот первый рычаг содержал бы ползун, движение которого управлялось посредством следящего устройства кулачка, а второй качающийся рычаг содержал кронштейн, по существу перпендикулярный его геометрической оси вращения, причем конец кронштейна был бы соединен посредством тяги с ползуном.
Целесообразно, чтобы головка второго качающегося рычага была выполнена с возможностью непосредственного транспортирования направляющего средства.
Целесообразно, чтобы по меньшей мере один рычаг содержал центральный участок, проходящий через его геометрическую ось вращения, по существу перпендикулярный к этой оси и соединяющийся с концевым участком, который является по существу параллельным геометрической оси вращения и удерживает направляющий орган, причем центральная часть была выполнена с возможностью скольжения в радиальном направлении по отношению к геометрической оси вращения.
Целесообразно также, чтобы устройство содержало фиксированный кулачок и следящий механизм кулачка, находящийся в механическом контакте с рабочей поверхностью этого кулачка и закрепленный на центральной части, причем поступательное перемещение этого рычага управлялось бы посредством следящего механизма кулачка.
Предпочтительно, чтобы рычаги были выполнены и размещены таким образом, чтобы направляющее средство охватывало данную монтажную форму, причем движение направляющего средства по существу обеспечивалось бы в так называемой плоскости движения, то есть плоскости, которая является перпендикулярной геометрической оси вращения первого рычага, при этом относительное перемещение между этим направляющим средством и монтажной формой определяло требуемую траекторию для нити на поверхности монтажной формы.
Предпочтительно, чтобы направляющее средство было образовано отверстием на конце второго качающегося рычага, причем второй качающийся рычаг был выполнен полым и сквозь него проходила упомянутая нить.
Предпочтительно также, чтобы средства управления качающегося рычага были выполнены с возможностью транспортирования направляющего средства в циклическом движении, совершаемом в плоскости движения, для того, чтобы подводить это направляющее средство последовательными циклами к зоне, находящейся в непосредственной близости от каждого из требуемых концов для нити на траектории.
Предложен также способ изготовления пневматической шины, при котором изготавливают усиливающую арматуру на основе одной нити, подаваемой по существу непрерывно, и по необходимости, посредством распределительного устройства на тороидальную монтажную форму, на которой формируют усиливающую арматуру, укладывая нити дугами в соответствии с требуемой траекторией для этой нити, согласно которому используют устройство в соответствии с любым из п.п.1-11.
Предпочтительно, чтобы нити укладывали за счет циклического перемещения, совершаемого в плоскости движения, обеспечивающего подведение направляющего средства последовательными циклами к зоне, расположенной в непосредственной близости от каждого из требуемых концов нити на траектории, причем работу прижимных устройств синхронизировали с циклическим перемещением направляющего средства, накладывающим нить от одного борта пневматической шины до другого ее борта.
Предпочтительно также, чтобы изготавливали усиливающую арматуру, укладывая рядом друг с другом дуги нити на поверхность монтажной формы.
Эти конструктивные решения оказываются предпочтительными для того, чтобы иметь возможность корректно расположить направляющее средство для нити над монтажной формой, в частности, на концах траектории укладки, и без того, чтобы какая-либо часть качающихся рычагов сталкивалась с монтажной формой в процессе осуществления возвратно-поступательного движения.
Кроме того, в последующем изложении описан также способ реализации предлагаемого устройства с единственным скользящим рычагом, используемого при изготовлении пневматической шины для системы PAX, для которой известно, что борт такой пневматической шины имеет весьма специфическую форму, которая делает бесполезным то условие, чтобы головка последнего рычага, несущая на себе направляющее средство, была искривлена в направлении монтажной формы. Разумеется, этот способ реализации также может быть использован для изготовления обычных пневматических шин, в частности, с использованием одного рычага, искривленного в направлении монтажной формы, и наоборот, что одновременно относится ко всему указанному выше.
Все характеристики и преимущества предлагаемого изобретения поясняются в приведенном ниже описании примеров его реализации со ссылками на чертежи, на которых:
- Фиг.1 представляет схематический вид в перспективе, иллюстрирующий первый способ реализации устройства в соответствии с предлагаемым изобретением;
- Фиг.2 представляет схематический вид в перспективе детали прижимного механизма этого устройства;
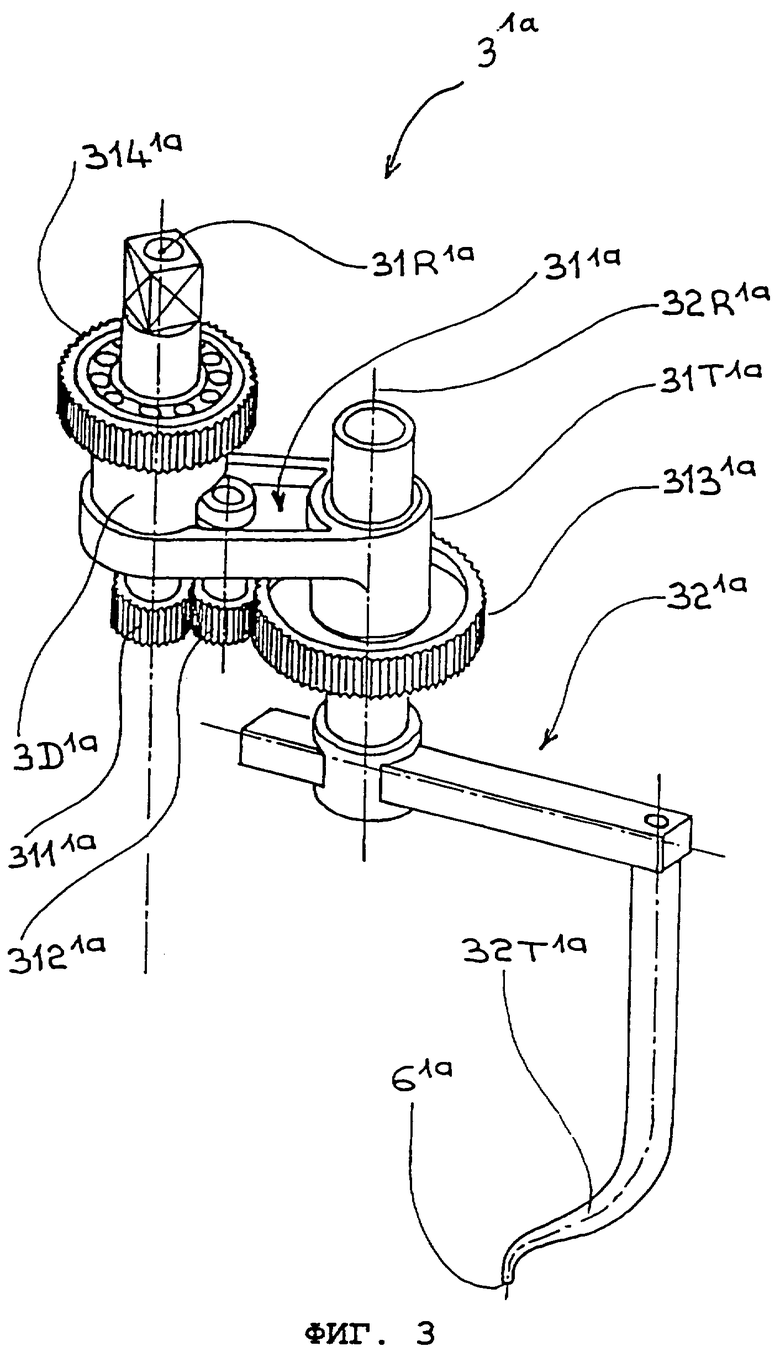
- Фиг.3 представляет схематический вид в перспективе детали первого варианта устройства по первому способу реализации предлагаемого изобретения;
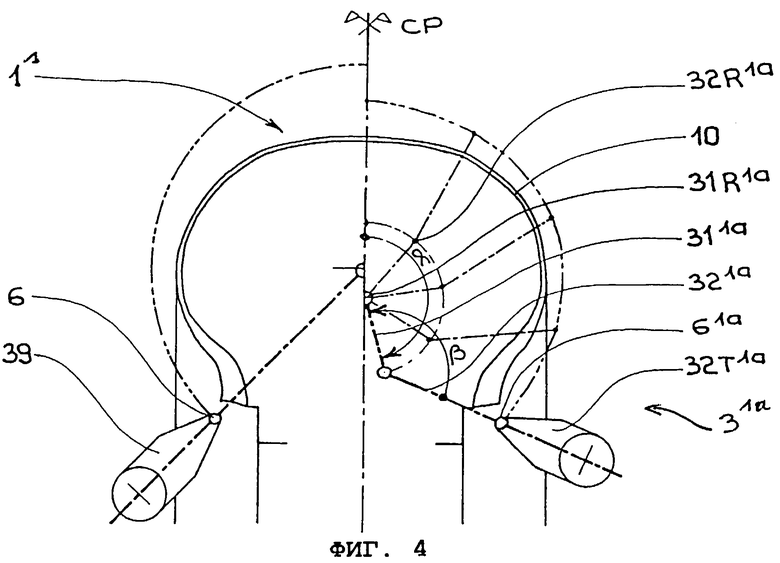
- Фиг.4 представляет сравнительную схематическую картину функционирования устройства по первому варианту первого способа реализации и устройства с одним единственным качающимся рычагом;
- Фиг.5 представляет схематический вид в перспективе детали второго варианта устройства по первому способу реализации предлагаемого изобретения;
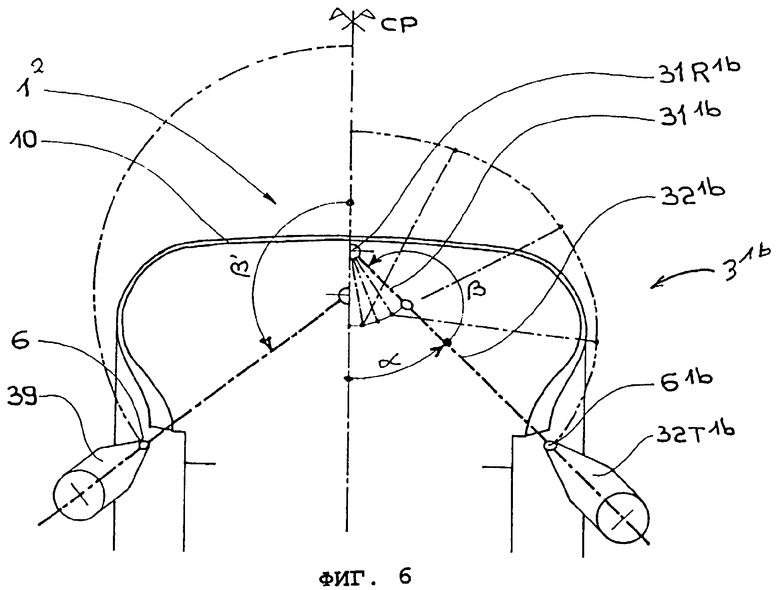
- Фиг.6 представляет сравнительную схематическую картину функционирования устройства по второму варианту первого способа реализации и устройства с одним единственным качающимся рычагом;
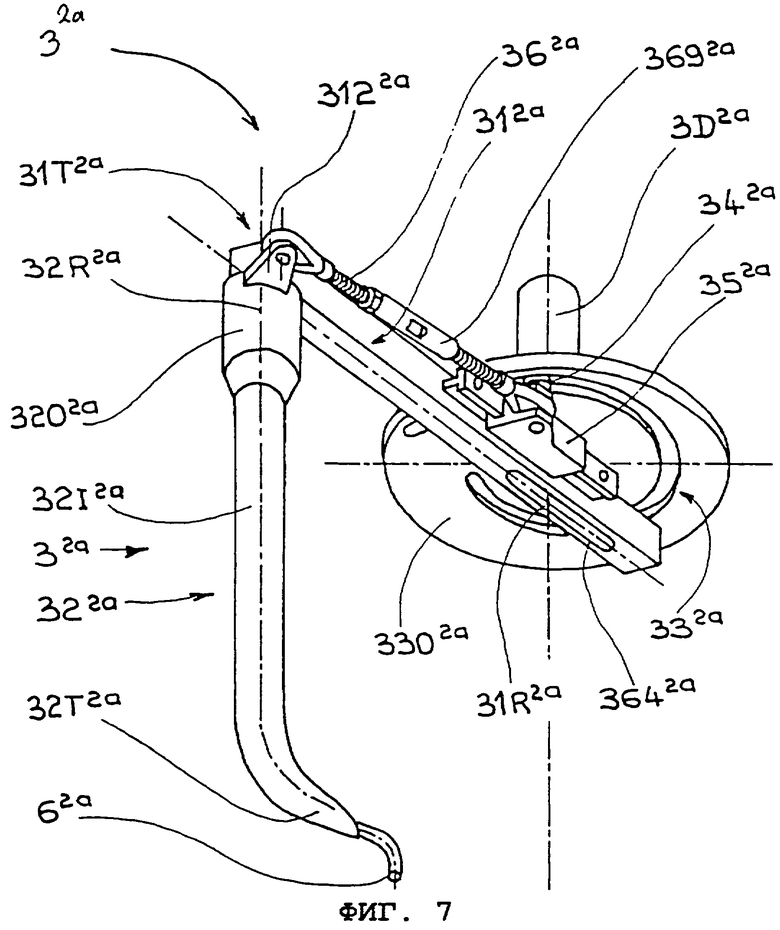
- Фиг.7 представляет схематический вид в перспективе, показывающий качающиеся рычаги устройства по первому варианту второго способа реализации устройства в соответствии с предлагаемым изобретением;
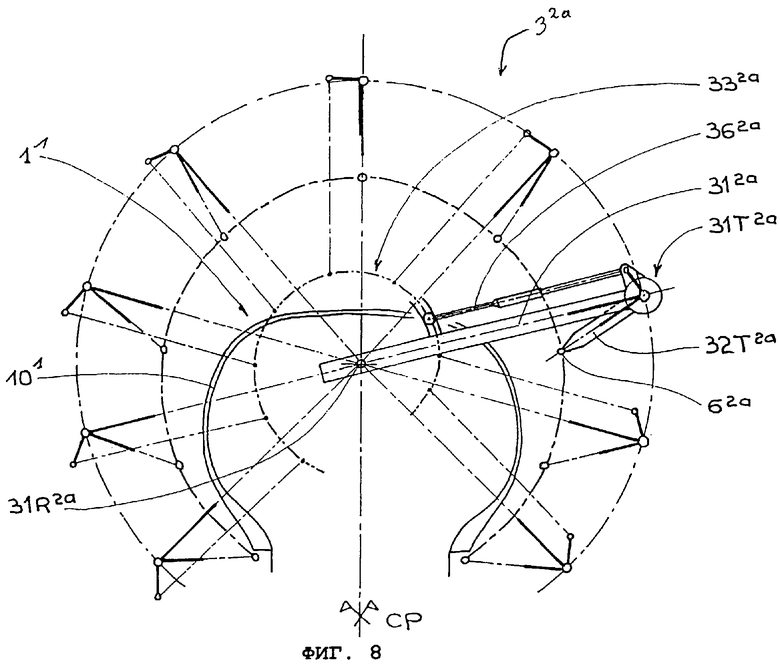
- Фиг.8 схематически иллюстрирует первый вариант второго способа реализации;
- Фиг.9 представляет сравнительную схематическую картину функционирования устройства по первому варианту второго способа реализации и устройства с одним единственным качающимся рычагом;
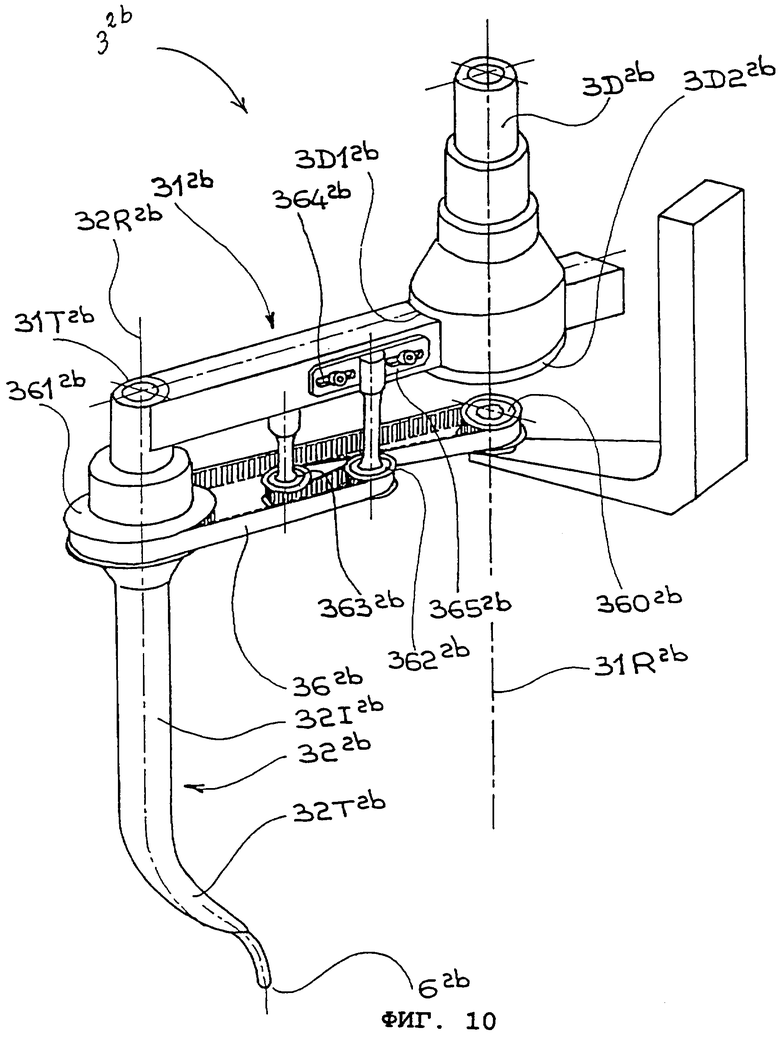
- Фиг.10 представляет схематический вид в перспективе, показывающий качающиеся рычаги устройства по второму варианту второго способа реализации устройства в соответствии с предлагаемым изобретением;
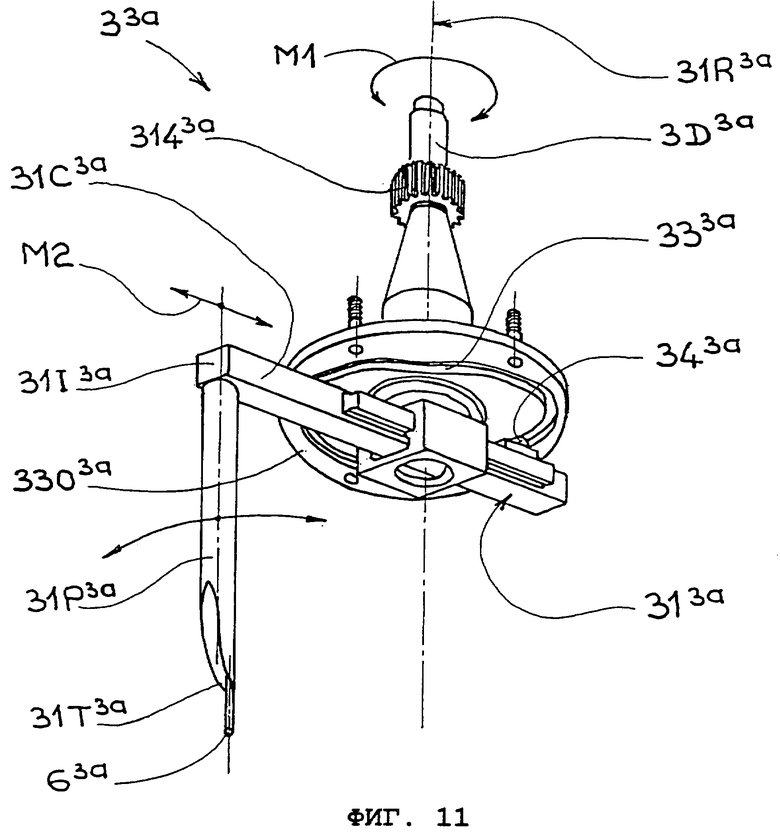
- Фиг.11 представляет схематический вид в перспективе, иллюстрирующий третий способ реализации устройства в соответствии с предлагаемым изобретением;
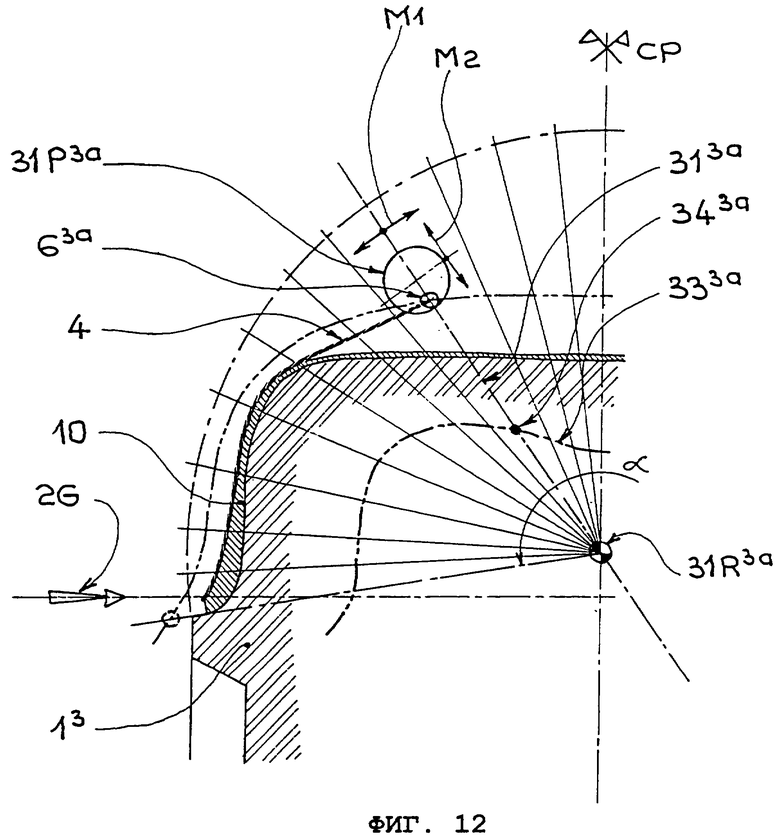
- Фиг.12 схематически иллюстрирует функционирование устройства в соответствии с третьим способом реализации предлагаемого изобретения.
На фиг.1 показано (как, впрочем, и для всех описанных здесь примеров реализации предлагаемого изобретения, что, однако, не является ограничительной характеристикой), что монтажная форма представляет собой сердечник 11 (жесткий и демонтируемый), образующий геометрию внутренней поверхности изготавливаемой пневматической шины. Этот сердечник покрыт слоем каучука 10, например слоем герметизирующей резины на основе бутилового каучука и слоем каучука, обеспечивающего покрытие нитей каркаса. Этот каучук 10, покрывающий сердечник 1, обеспечивает возможность удержания дуг 40 нити 4 на этой монтажной форме 1 по мере укладки этой нити посредством эффекта приклеивания этих нитей. Разумеется, этот сердечник 1 приводится во вращательное движение при помощи любого подходящего для этого устройства, не показанного на фиг.1.
Собственно органы укладки нити содержат, главным образом, систему с качающимися рычагами 31a, с одной стороны, и устройства прижатия 2G и 2D, с другой стороны. Система с качающимися рычагами 31a расположена на качающемся валу 3D1a, геометрическая ось вращения которого обозначена на этой фигуре позицией 31R1a. Эта геометрическая ось вращения 31R1a пересекает сердечник 1 в положении функционирования, предназначенном для укладки нити 4 на этот сердечник. Корпус 301a содержит механическое устройство управления, предназначенное для преобразования создаваемого двигателем 3001a вращательного движения в колебательное движение, приложенное к валу 3D1a. Эта система с качающимися рычагами 31a содержит первый качающийся рычаг 311a и второй качающийся рычаг 321a, выполненные в виде каскада. Такое конструктивное решение с двумя качающимися рычагами легко позволяет перемещать направляющее средство от одного борта данной пневматической шины до другого ее борта и обеспечить таким образом, при совместной работе с устройствами прижатия 2G и 2D, действие данного устройства в пространстве от одного борта до другого.
В том, что касается использованных на приведенных в приложении фигурах позициях, то здесь использованная условность состоит в обозначении подобных друг другу элементов одними и теми же основными позициями, например, «3» для системы с качающимися рычагами, и в обозначении специфической принадлежности к соответствующему способу реализации или к соответствующему варианту реализации этого способа при помощи буквенно-цифрового индекса, размещенного на месте показателя степени, например, «1a» для способа «1» (первый вариант) реализации (в соответствии с которым используется последовательность из трех качающихся рычагов) в своем варианте «а». Позиция без такой специфической маркировки относится к элементу, одинаковому в различных вариантах реализации или должна быть понята, как обозначающая все варианты всех способов реализации без различия.
Что касается сердечника 1, использованная условность аналогично состоит в обозначении специфического типа формы реализации при помощи буквенно-цифрового индекса, размещенного на месте показателя степени, например, «11». Позиция без такого специфического обозначения относится к любому типу формы реализации без различия, что представляет собой общий случай данного описания, и напротив того, к фигурам, для которых был сделан выбор иллюстрации.
Первый качающийся рычаг 311a установлен на качающемся валу 3D1a. Этот первый рычаг 311a содержит головку 31Т1a на своем конце, противоположном геометрической оси его вращения 31R1a. Второй качающийся рычаг 321a, шарнирно закрепленный при помощи геометрической оси вращения 32R1a этого второго рычага, установлен на головке 31Т1a первого рычага 311a. Этот второй рычаг 321a содержит основание 3201a, расположенное по существу перпендикулярно к геометрической оси вращения 32R1a этого рычага. Затем этот второй рычаг 321a содержит промежуточную часть 3211a, проходящую, по существу, параллельно его геометрической оси вращения, в направлении плоскости движения. И наконец, этот второй качающийся рычаг 321a содержит головку 32Т1a, на конце которой располагается отверстие 61a.
Весьма благоприятная особенность этого первого примера реализации (причем эта особенность характерна также для любого из описанных здесь примеров реализации, не являясь при этом ограничительной) касается системы направляющих для нити 4. Прежде всего, эта нить 4 доводится до ушка 3011a, закрепленного в пространстве, располагающемся по существу на геометрической оси вращения 31R1a первого качающегося рычага. Затем эта нить вводится в отверстие, выполненное в основании второго качающегося рычага 321a, и проходит внутри второго рычага, поскольку этот второй рычаг выполнен полым. И наконец, в торце головки этого второго рычага направляющее средство образовано отверстием 61a на конце второго качающегося рычага 321a. Это отверстие выполняет ту же функцию, которую выполняет очко или ушко «33» в патентной заявке ЕР 0580055. Все описанные примеры реализации относятся к особенно предпочтительным вариантам реализации, содержащим только два качающихся рычага. При этом головка второго качающегося рычага непосредственно транспортирует направляющее средство.
Перед тем, как приступить к рассмотрению деталей управления всеми движениями системы с качающимися рычагами 21a, следует вернуться к прижимным устройствам 2G и 2D. Эти устройства должны быть размещены соответствующим образом для выполнения функции, подробно описанной в патентной заявке ЕР 0580055. На фиг.2 более подробно показано прижимное устройство 2D, которое содержит вилку 21D и элемент прижатия 22D, причем оба этих элемента являются подвижными в диапазоне между убранным положением, обозначенным позицией R (положение, удаленное от поверхности сердечника 1), и выдвинутым положением, обозначенным позицией А. Здесь штрихпунктирными линиями элемент прижатия показан в своем выдвинутом положении. В том, что касается указанных на фигурах позиций, условность состоит в обозначении каждого из органов прижимных устройств при помощи главной позиции, например, «21» для вилки, и указания специфической принадлежности к прижимному устройству одной из сторон, то есть к левой стороне или к правой стороне на фиг.1, при помощи, соответственно, буквы «G» или «D», размещенной на месте показателя степени. При этом позиция без такого специфического обозначения обычно относится либо к одному, либо другому из прижимных устройств без их различия.
Возвращаясь к патентной заявке ЕР 0580055, следует отметить соответствующие функции, выполняемые вилкой и элементом прижатия 22, а также соответствующие функции, характерные для упомянутых так называемого выдвинутого положения А и так называемого убранного положения R.
На фиг.2 показано, что, как вилка 21, так и элемент прижатия 22, имеют вид параллельных друг другу пластин. При этом вилка 21 всегда располагается, по отношению к элементу прижатия, в радиальном направлении со стороны оси вращения сердечника 1. Однако следует подчеркнуть, что может быть принято и прямо противоположное расположение, в соответствии с которым элемент прижатия 22 располагается ближе к оси вращения, чем вилка 21.
Вилка 21 имеет головку 210 V-образной формы, которая обеспечивает возможность захвата и центрирования нити 4. В процессе осуществления фазы захвата нити плоскость, имеющая V-образную форму, располагается по существу перпендикулярно этой нити 4. В том случае, когда эта нить 4 должна быть расположена в радиальном направлении, как это имеет место в случае, показанном на фиг.1, пластина, образующая вилку 21, ориентирована касательным образом по отношению к концентрической окружности сердечника 1. Эта вилка 21 содержит также вырез 211, о функции которого более подробно будет сказано ниже.
Вилка 21 предназначена для захвата нити 4 на поверхности сердечника 1, а затем удерживания ее там. Для этого выдвижение вилки в направлении сердечника 1 начинается в тот момент, когда отверстие 6 подвело нить 4 к одному из концов его возвратно-поступательного движения, то есть в том случае, когда данное устройство по существу находится в конфигурации, показанной на фиг.1. Эта вилка 21 останавливается после того, как она обеспечила закрепление этой нити в каучуке, покрывающем сердечник 1. Таким образом, вилка 21 позволяет прижать нить 4 с усилием, достаточным для того, чтобы она надлежащим образом приклеилась в заданном месте.
С учетом требуемого в данном случае шага укладки, величина которого сама представляет собой функцию вращательного движения сердечника, схематически представленного на фиг.1 стрелкой F, продолжение движения системы с качающимися рычагами 3 вызывает формирование петли вокруг заостренной вершины 212 вилки, что определяет начало укладки новой дуги 40 на сердечник 1 (см. фиг.1). И возможность перехода отверстия 6 за вилку 21 в фазе возврата обеспечивается через вырез 211, хотя в этой фазе процесса изготовления вилка 21 будет прижата к сердечнику 1. Следует отметить, что размеры петли представляют собой функцию размеров заостренной вершины 212.
Элемент прижатия 22 вступает в действие после вилки 21 и после начала так называемой фазы возврата отверстия 6. В рассматриваемых здесь примерах реализации этот элемент прижатия 22 упирается в нить 4 в несколько более высоком радиальном положении. Предпочтительно он еще удерживает нить 4 в процессе отведения или уборки вилки 21. Удержание в этом положении элемента прижатия на тот период, пока убирается вилка, помогает избежать того, чтобы вилка 21 могла увести за собой петлю нити 4, которая сформировалась вокруг одной из ее заостренных вершин 212, и которая, даже если она приклеилась к поверхности каучука, может иметь тенденцию остаться связанной с этой вилкой. Таким образом, надежность закрепления нити 4 в борту изготавливаемой пневматической шины оказывается повышенной.
Разумеется, движение в направлении выдвинутого положения и возврат в убранное положение как для вилки 21, так и для элемента прижатия 22 (см. двухсторонние стрелки A/R и R/A, показанные на фиг.1), управляются синхронизированным образом с работой системы с качающимися рычагами 31a при помощи любого подходящего в данном случае устройства (например, путем передачи движения от вала 3D при помощи соответствующей механической трансмиссии, например, использующей приводной ремень или трос, или путем электрической синхронизации нескольких используемых здесь приводных электрических двигателей).
Система с качающимися рычагами 31a заставляет отверстие 61a огибать сердечник 1. Во всех рассматриваемых здесь случаях реализации система с качающимися рычагами 3 обеспечивает движение отверстия 6 в одной плоскости, то есть в так называемой «плоскости движения». При этом следует позаботиться о реализации тщательно обработанных краев этого отверстия 6 для того, чтобы не порвать нить 4, поскольку выходной конец этой нити располагается обычно по существу в этой плоскости движения, то есть в плоскости, которая является перпендикулярной геометрической оси вращения 31R1a.
Таким образом, именно посредством качающегося по вращательному движению вала 3D1a обеспечивается задание для всей системы с качающимися рычагами необходимых в данном случае движений. Качающийся вал 3D1a не осуществляет непрерывного вращения, но колеблется по вращательному движению в пределах некоторой дуги окружности, точная величина которой зависит от желаемой амплитуды движения отверстия 61a. Механическое устройство управления типа кривошипно-шатунного механизма, или любое другое подходящее в данном случае устройство, нетрудно обрисовать в зависимости от технических требований, зависящих от особенностей рассматриваемого варианта применения, и привести в движение при помощи двигателя 3001a.
Для управления относительным положением второго качающегося рычага 321a по отношению к первому качающемуся рычагу 311a, на этом первом рычаге размещена система шестерен (см. фиг.3), которая содержит первую фиксированную шестерню 3111a, центрированную на геометрической оси вращения первого качающегося рычага, концевую шестерню 3131a, центрированную на геометрической оси вращения второго качающегося рычага и жестко связанную с этим рычагом, и промежуточную шестерню 3121a, находящуюся в зубчатом зацеплении с первой шестерней и с концевой шестерней. Эта первая фиксированная шестерня 3111a жестко связана с корпусом 301a. Шестерни 3121a и 3131a установлены с возможностью вращения на первом рычаге 311а. Этот первый рычаг 311а приводится в движение при помощи ведущей шестерни 3141а, которая сама в свою очередь приводится в чередующееся движение, как об этом уже было указано выше.
Угол α (который можно видеть на фиг.4) представляет мгновенное положение первого качающегося рычага 311a. Этот угол α изменяется с амплитудой, достаточной для того, чтобы укладываемая нить достигала концевых зон своей траектории. Необходимо, чтобы отверстие 6 проходило в своем движении дальше того места, где действует прижимное устройство 2. В первом варианте реализации, проиллюстрированном на фиг.3 и 4, амплитуда углового перемещения первого качающегося рычага 311a является достаточно большой, но здесь этот первый рычаг имеет относительно небольшую длину и, соответственно, относительно небольшую инерцию. При этом число зубьев Nf фиксированной шестерни 3111a меньше числа зубьев Nc концевой шестерни 3131a и при этом выполняется соотношение Nf=aNe, причем здесь первый рычаг совершает колебания с амплитудой α, где этот угол α является положительным в обратном тригонометрическом направлении, а второй рычаг совершает колебания с амплитудой β=180°-аα вокруг монтажной формы, причем этот угол β является положительным в тригонометрическом направлении. В рассматриваемом здесь примере реализации используется понижающее передаточное отношение 12/18. При этом амплитуда углового перемещения второго качающегося рычага 321a остается вполне совместимой с реализацией высоких темпов функционирования данного устройства.
В левой части чертежа, показанного на фиг.4, представлено устройство с одним единственным качающимся рычагом 39, тогда как в правой части этого чертежа на той же фигуре представлено устройство в соответствии с первым вариантом первого способа реализации предлагаемого изобретения. Здесь показано, что сердечник 11 спроектирован для изготовления достаточно узких пневматических шин. На представленном чертеже можно сравнить два устройства, каждое из которых разработано таким образом, чтобы обеспечить возможно большее приближение к концу траектории дуги нити, укладываемой на этот сердечник. Отверстие 6 в обоих случаях действительно очень близко подходит к борту изготавливаемой пневматической шины. Однако в случае устройства в соответствии с предлагаемым изобретением (правая часть чертежа на упомянутой фигуре) система с качающимися рычагами требует существенно меньшего свободного пространства вокруг данного сердечника, поскольку она в меньшей степени удаляется от этого сердечника в том случае, когда проходит через зону расположения будущей беговой дорожки протектора.
Как показано на фиг.5 и 6, в варианте осуществления первого способа реализации это преимущество проявляется в еще большей степени в том случае, когда необходимо изготовить очень широкую пневматическую шину, что хорошо видно по конфигурации сердечника 12, которая находит все более широкое применение в различных областях использования.
Следует отметить, что этот вариант реализации содержит также первый качающийся рычаг 311b, качающийся вал 3D1b, геометрическую ось вращения 31R1b первого качающегося рычага 311b и головку 31T1b, располагающуюся на конце этого рычага, противоположном геометрической оси его вращения 31R1b. Это устройство содержит также второй качающийся рычаг 321b, имеющий геометрическую ось вращения 32R1b и головку 32Т1b, на конце которой располагается отверстие 61b. Здесь также имеется система, состоящая из трех шестерен 3111b, 3121b и 3131b. Первая шестерня 3111b является фиксированной и жестко связана с корпусом, не показанным на фиг.5. Шестерни 3121b и 313113 установлены с возможностью вращения на первом качающемся рычаге 311b. Этот первый рычаг 311b приводится в движение при помощи ведущей шестерни 3141b, которая сама в свою очередь приводится в чередующееся движение так, как уже было указано выше.
Здесь число зубьев Nf фиксированной шестерни 3111b превышает число зубьев Ne концевой шестерни 3131b так, что соблюдается соотношение Nf=aNe, причем первый рычаг совершает колебательные движения с амплитудой α в пространстве, располагающемся со стороны от своей геометрической оси вращения, противоположной монтажной форме, а второй рычаг при этом совершает колебательные движения с амплитудой β=аα вокруг упомянутой монтажной формы, причем в данном случае углы α и β являются положительными в тригонометрическом направлении. Здесь используется повышающее передаточное отношение, составляющее, например, 18/12. Ввиду очень малой амплитуды углового перемещения первого качающегося рычага 311b амплитуда углового перемещения второго качающегося рычага 321b остается вполне совместимой с высокими темпами функционирования данного устройства.
В левой части чертежа, показанного на фиг.6, представлено устройство с одним единственным качающимся рычагом 39, тогда как в правой части этого чертежа на той же фигуре представлено устройство в соответствии со вторым вариантом первого способа реализации предлагаемого изобретения. Здесь показано, что сердечник 1 выполнен для изготовления достаточно широких пневматических шин. На представленном чертеже можно сравнить устройства, каждое из которых разработано таким образом, чтобы обеспечить возможно большее приближение к концу траектории дуги нити, укладываемой на сердечник. Отверстие 6 в обоих случаях действительно очень близко подходит к борту изготавливаемой пневматической шины. На фиг.6 еще можно сравнить устройства, каждое из которых разработано таким образом, чтобы обеспечить возможно большее приближение к концу траектории дуги нити, укладываемой на этот сердечник. Отверстие 6 в обоих случаях действительно очень близко подходит к борту изготавливаемой пневматической шины. Однако в случае устройства в соответствии с предлагаемым изобретением (см. правую часть чертежа на упомянутой фигуре) система с качающимися рычагами требует существенно меньшего свободного пространства вокруг сердечника. В случае рассматриваемого здесь типа, весьма часто встречающемся на практике, единственный рычаг 39, непосредственно сопоставимый с предлагаемым изобретением в том, что касается укладки нити на заготовку будущего борта пневматической шины, будет сильно удаляться от сердечника в том случае, когда он будет проходить зону будущей беговой дорожки протектора. Система в соответствии с предлагаемым изобретением также представляет значительный выигрыш в инерционности находящихся в колебательном движении частей системы укладки. Длина, а значит и инерционность деталей, находящихся в движении, меньше для технического решения в соответствии с предлагаемым изобретением.
Даже если, как в предшествующих примерах реализации, так и в последующих примерах реализации, отверстие 6 совершает движение, траектория которого симметрична по отношению к средней плоскости, и достигает зон непосредственной близости к каждому из бортов пневматической шины, определяемых на сердечнике 1, в своем совершенно симметричном движении, это обстоятельство не является ограничительным. При этом не исключается, что концы траектории движения отверстия не будут находиться в точках, симметричных по отношению к средней плоскости, например, для изготовления пневматической шины, траектория дуг укладки нити для которой не будет симметричной. Это, например, будет соответствовать случаю изготовления пневматической шины, у которой диаметры монтажного посадочного места или диаметры каждого из посадочных мест являются различными.
Отверстие 6 совершает возвратно-поступательное движение от одного борта изготавливаемой пневматической шины до другого ее борта, или, точнее говоря, от места, располагающегося рядом с одним ее бортом, до места, располагающегося рядом с другим ее бортом. Базовый цикл функционирования устройств в соответствии с предлагаемым изобретением содержит следующие" этапы:
- поскольку нить удерживается против монтажной формы на протяжении достаточного времени, перемещают упомянутое отверстие (направляющее средство) в плоскости движения этого отверстия вплоть до первого конца,
- прижимают нить к монтажной форме на этом первом конце и удерживают ее в этом прижатом положении по меньшей мере на протяжении некоторого достаточного времени посредством прижимного устройства,
- повторяют первый этап в обратном направлении вплоть до второго конца,
- прижимают нить к монтажной форме на этом втором конце и удерживают ее в этом прижатом положении посредством другого прижимного устройства,
и повторяют таким же образом этот базовый цикл вплоть до укладки требуемого числа дуг нити на поверхность монтажной формы в соответствии с желаемой траекторией расположения этой нити 4 на поверхности данной монтажной формы, перемещая при этом монтажную форму синхронизированным образом по отношению к движению направляющего средства.
Ниже приведено описание первого варианта второго способа реализации устройства в соответствии с предлагаемым изобретением. В приведенном ниже описании этого варианта реализации даются ссылки на фиг.7-9. На фиг.7 схематически представлена только система с качающимися рычагами 32a, и не показана монтажная форма, на которую укладывается нить, или корпус, который удерживает эту нить. На этой фигуре показан первый качающийся рычаг 312a, установленный на качающемся валу 3D2a и имеющий геометрическую ось вращения 31R2a. Этот первый рычаг 312a содержит головку 31Т2a, располагающуюся на конце, противоположном геометрической оси его вращения 31R2a. Второй качающийся рычаг 322a шарнирно закреплен при помощи геометрической оси вращения 32R2a этого второго рычага на головке 31Т2a первого рычага 312a. Данное устройство содержит фиксированный кулачок 332a, выполненный в виде соответствующей выемки в диске 3302a, центрированном на геометрической оси вращения первого качающегося рычага. Следящий механизм кулачка 342a находится в механическом контакте с этим кулачком, причем второй рычаг содержит кронштейн 3122a, по существу перпендикулярный его геометрической оси вращения, и конец упомянутого кронштейна связан при помощи тяги 362a с ползуном. Это позволяет обеспечить управление относительным положением второго качающегося рычага 322a по отношению к первому качающемуся рычагу 312a.
При этом второй качающийся рычаг содержит основание 3202a, расположенное по существу параллельно геометрической оси его вращения, и содержит также головку 32Т2a, искривленную в направлении геометрической оси вращения первого качающегося рычага 312a. На конце этой головки 32Т2a располагается отверстие 62a. Второй рычаг 322a выполнен таким образом, чтобы перемещать отверстие 62a вплоть до плоскости движения.
На фиг.8 показано, что для реализации движения и конфигураций системы качающихся рычагов 32a, которые будут симметричными по отношению к средней плоскости СР, рабочая поверхность кулачка 332a не является симметричной по отношению к плоскости СР, поскольку с одной стороны от этой плоскости СР необходимо поворачивать второй рычаг 322a с одной стороны от первого рычага 312a, а с другой стороны от этой плоскости СР необходимо поворачивать второй рычаг 322a с другой стороны от первого рычага 312a.
В левой части чертежа, показанного на фиг.9, представлено устройство с одним единственным качающимся рычагом 39, тогда как в правой части этого чертежа на той же фигуре представлено устройство в соответствии со вторым способом реализации предлагаемого изобретения. Здесь показано, что сердечник 1 выполнен для изготовления достаточно узких пневматических шин. На представленном чертеже можно сравнить устройства, каждое из которых разработано таким образом, чтобы обеспечить возможно большее приближение к концу траектории дуги нити, укладываемой на этот сердечник. Отверстие 6 в обоих случаях действительно очень близко подходит к борту изготавливаемой пневматической шины. Здесь показано, что величина угла α', необходимая, при использовании устройства, изображенного в левой части чертежа, для достижения борта изготавливаемой пневматической шины без того, чтобы его промежуточная часть касалась монтажной формы, начиная от среднего положения на плоскости СР, существенно превышает величину аналогичного угла α для показанного в правой части этого чертежа устройства, выполненного в соответствии с предлагаемым изобретением.
Среди других преимуществ можно упомянуть то обстоятельство, что длина первого качающегося рычага 312a имеет меньшую величину, чем длина рычага 39. Кроме того, длина оконечного носка, который образует головку 32Т2a, оказывается существенно меньшей, чем соответствующая длина оконечного носка 39Т. В то же время, предохранительное расстояние «d», существующее между монтажной формой и устройством укладки, имеет в обоих случаях вполне сопоставимую величину. Таким образом, здесь хорошо видны все преимущества предлагаемого изобретения.
Благодаря управлению с использованием кулачка относительное движение между вторым качающимся рычагом и первым качающимся рычагом может быть, в случае необходимости, свободно отрегулировано, поскольку оно зависит главным образом от профиля используемого в данном случае кулачка. Таким образом, можно освободиться от условия пропорциональности относительного вращательного движения между первым и вторым качающимися рычагами, представляющего собой специфическую характеристику управления при помощи шестерен в соответствии с первым способом реализации предлагаемого изобретения или вторым вариантом второго способа реализации этого изобретения. Здесь можно задать относительное положение второго качающегося рычага по отношению к первому качающемуся рычагу таким образом, чтобы, в частности, быстро отвести отверстие 6 от сердечника 1. Таким образом обеспечивается соответствующая величина предохранительного расстояния «d» между головкой 32T2a и сердечником 1 при достаточно тесном сближении с поверхностью сердечника 1 в зоне формирования борта изготавливаемой пневматической шины.
На фиг.10 схематически проиллюстрирован вариант второго способа реализации предлагаемого изобретения, в соответствии с которым конструктивное решение с использованием приводного ремня 362b обеспечивает выполнение функции, сопоставимой с функцией, выполняемой кулачком в описанном выше примере реализации. Здесь показан колеблющийся по вращательному движению вал 3D2b, на котором закреплен первый качающийся рычаг 312b. Этот первый качающийся рычаг 312b содержит головку 32T2b. Второй качающийся рычаг 322b установлен с возможностью вращения на головке 31Т2b. Зубчатый приводной ремень 362b установлен на первом шкиве 3602b, центрированном на геометрической оси вращения 31R2b первого качающегося рычага. Этот первый шкив 3602b не является подвижным по вращательному движению. Зубчатый приводной ремень 362b также установлен на втором шкиве 3612b, центрированном на геометрической оси вращения 32R2b второго качающегося рычага 322b. Этот второй шкив 3612b жестко связан со вторым качающимся рычагом.
Зубчатый приводной ремень 362b обматывается также вокруг ролика натяжения 3622b и возвратного ролика 3632b, причем оба ролика закреплены на первом качающемся рычаге 312b. Этот первый качающийся рычаг 312b установлен в отверстии 3D12b, выполненном в валу 3D2b, и неподвижно закреплен в нем при помощи фланца 3D22b. Таким образом, в данном случае имеется кулиса, обеспечивающая возможность изменения относительного положения первого качающегося рычага 312b на валу 3D2b для обеспечения возможности регулировки расстояния между геометрическими осями вращения 31R2b и 32R2b. Для того чтобы иметь возможность компенсировать эти изменения расстояния при том, что длина приводного ремня 362b остается фиксированной, ролик натяжения 3622b установлен на первом качающемся рычаге 312b посредством лапки 3652b, содержащей вырезы 3642b.
Разумеется, может оказаться полезным предусмотреть такую регулировку и в других способах реализации. Так, например, на фиг.7 показан вырез 3642a, выполненный на первом качающемся рычаге 312a для регулирования его относительного положения по отношению к валу 3D2a в процессе монтажа данного устройства. Существование возможности регулировки представляет собой причину, по которой тяга 362a содержит регулировочную муфту 3692a.
На фиг.11 и 12 показан способ реализации предлагаемого изобретения, адаптированный для изготовления пневматических шин для системы PAX. Здесь сердечник 13 имеет характеристическую форму в зоне расположения бортов этой пневматической шины. На фиг.11 схематически представлена только система с качающимися рычагами 33a и не показана монтажная форма, на которую укладывают нить, или корпус, который удерживает эту нить. Здесь показан рычаг 313a, установленный на качающемся валу 3D3a, имеющем геометрическую ось вращения 31R3a. Этот рычаг 313a содержит центральный участок 31С3a, проходящий через геометрическую ось вращения 31R3a и по существу перпендикулярный к этой оси. Данное устройство содержит фиксированный кулачок 333a, выполненный в виде соответствующего выреза в диске 3303a, центрированном на геометрической оси вращения этого рычага. Следящий механизм кулачка 343a находится в механическом контакте с рабочей поверхностью этого кулачка. Этот следящий механизм кулачка 343a закреплен на центральной части 31С3a, причем эта центральная часть 31С3a имеет возможность скользить в радиальном направлении по отношению к качающемуся валу 3D3a и, следовательно, по отношению к его геометрической оси вращения 31R3a. Поступательное движение М2 этого рычага 313a управляется при помощи следящего механизма кулачка 343a.
Качающийся вал 3D3a жестко связан с ведущей шестерней 3143a, которая сама в свою очередь приводится в чередующееся движение так, как об этом было указано выше (см. пояснения, приведенные для ведущей шестерни 3141b, показанной на фиг.5), для придания ей движения, схематически обозначенного позицией M1. При этом угол α (см. фиг.12) представляет мгновенное положение качающегося рычага 313a. Этот угол α изменяется с амплитудой, достаточной для того, чтобы укладываемая нить достигала концевых зон требуемой для нее траектории. При этом необходимо, чтобы отверстие 6 проходило дальше места, где действует упомянутое прижимное устройство 2.
Центральный участок 31С3a рычага соединяется с его концевым участком 31Т3a, который располагается по существу параллельно геометрической оси вращения 31R3a этого рычага и удерживает направляющий орган 63a. В проиллюстрированном здесь способе реализации рычаг образует прямой угол 3113a между центральной частью 31С3a и концевой частью 31T3a. На конце концевой части 31T3a располагается отверстие 63a.
Для реализации движения, симметричного по отношению к средней плоскости СР, траектория рабочей поверхности кулачка 333a является симметричной по отношению к этой плоскости СР. Специалист в данной области техники легко сможет адаптировать траекторию этой рабочей поверхности кулачка для случая изготовления несимметричной пневматической шины.
Среди преимуществ данного способа реализации предлагаемого изобретения можно упомянуть то обстоятельство, что движение первого рычага может быть при необходимости достаточно свободно отрегулировано, поскольку это движение главным образом зависит от профиля кулачка. При этом можно обеспечить достаточное приближение к поверхности сердечника 1 в зоне расположения борта пневматической шины без существенного удаления от поверхности этого сердечника вокруг плоскости СР.
Описанные выше примеры реализации иллюстрируют устройства, в которых геометрическая ось вращения по меньшей мере одного качающегося рычага пересекает монтажную форму в рабочем положении, причем один или несколько качающихся рычагов выполнены и размещены таким образом, чтобы направляющее средство 6 охватывало данную монтажную форму, не приближаясь к ней слишком близко, причем относительное движение между направляющим средством и монтажной формой определяет требуемую траекторию для нити на поверхности данной монтажной формы.
Рассмотренные выше примеры иллюстрируют устройства, обеспечивающие укладку участков нити от одного борта изготавливаемой пневматической шины до другого ее борта. Можно также реализовать или использовать устройства, действующие в диапазоне от одного ее борта до одной из плечевых зон данной пневматической шины, например, для изготовления полукаркаса. Действительно, известно, что каркас радиальной пневматической шины может не быть сплошным от одного ее борта до другого, но может быть прерван в каком-либо месте под беговой дорожкой протектора. При этом усиливающая арматура каркаса укладывается между бортом и одной из плечевых зон данной пневматической шины. Устройство в соответствии с предлагаемым изобретением также может быть использовано для действия в диапазоне от одного борта данной пневматической шины до любой произвольной точки под ее беговой дорожкой протектора, включая пространство вплоть до противоположной плечевой зоны, с некоторой степенью перекрытия или наложением одного полукаркаса на другой.
Следует отметить, что отверстие 6 во всех вариантах реализации предлагаемого устройства приводится в циклическое движение в плоскости, названной выше «плоскостью движения направляющего отверстия». При этом сердечник 1 приводится во вращательное движение вокруг своей оси по мере того, как отверстие 6 осуществляет свои возвратно-поступательные перемещения в плоскости движения. Разумеется, движение этого сердечника 1 синхронизировано с возвратно-поступательным перемещением направляющего отверстия. Таким образом, реальная траектория расположения дуг 40 нити 4 одновременно представляет собой функцию фиксированного относительного положения (которое может быть наклонным) между плоскостью движения этого отверстия и сердечником и является функцией относительного перемещения между сердечником 1 и совершающим возвратно-поступательное перемещение отверстием 6.
В описанных выше примерах реализации траектория укладки дуги 40 является по существу радиальной, поскольку здесь описана реализация арматуры каркаса для радиальной пневматической шины, однако, это обстоятельство, разумеется, не является ограничительным. Плоскость движения может также составлять произвольный угол, имеющий величину, например, порядка 20°, по отношению к плоскости, перпендикулярной оси вращения сердечника 1, в соответствии с обычными условиями для измерения углов в области изготовления пневматических шин. Прижимные устройства 2G и 2D действуют в той же плоскости укладки.
Для того, чтобы реализовать арматуру каркаса, перекрещивающуюся в боковинах, можно отвести плоскость движения направляющего отверстия от строго радиальной ориентации путем наклона опоры средств укладки (например, корпуса 30) относительно оси, параллельной оси вращения сердечника 1. Можно также, ничего не меняя в элементах описанного выше устройства, изменить угол азимута сердечника на значительную величину, составляющую, например, 1/8 полного оборота для одного цикла возвратно-поступательного движения системы с качающимися рычагами 3 таким образом, чтобы получить угол укладки нити, который представляет собой функцию отношения перемещений (тогда как во всех описанных выше примерах реализации скорость движения сердечника 1 воздействовала только на величину шага укладки).
Приведенное ниже замечание поясняет дополнительный вариант реализации, который можно применить ко всем описанным здесь способам реализации предлагаемого изобретения во всех их вариантах реализации. Можно привести в чередующееся движение опору средств укладки (например, корпус 301a, показанный на фиг.1) для того, чтобы изменить траекторию укладки нити 4 на сердечнике 1. При этом можно, например, привести эту опору средств укладки в чередующееся поступательное движение (см. двухстороннюю стрелку Р на фиг.1), позволяющее переместить плоскость движения направляющего отверстия вдоль направления, перпендикулярного плоскости движения. Можно также придать опоре средств укладки колебательное движение относительно геометрической оси, перпендикулярной поверхности монтажной формы, лежащей в плоскости движения и пересекающей геометрическую ось вращения первого качающегося рычага (см. двухстороннюю стрелку Q вокруг оси М-М на фиг.1), позволяющее привести в колебательное движение плоскость движения относительно оси, параллельной плоскости движения. Можно также придать опоре средств укладки колебательное движение относительно любой оси, параллельной упомянутой выше оси. При этом следует отличать такую концепцию от простой фиксированной регулировки (также возможной и полезной в определенных случаях) угла, который образует корпус 301a относительно оси ММ.
Все эти специфические способы реализации обеспечивают дополнительную степень свободы для воздействия на точную форму траектории укладки нити 4.
Следует также отметить, что в случае изготовления подусиливающих полукаркасов можно одновременно реализовать каждый из этих полукаркасов с одной и с другой стороны данного сердечника, предусматривая для этого использование двух устройств в соответствии с предлагаемым изобретением, каждое из которых располагается против одной из сторон данного сердечника, причем в этом случае концы траектории укладки располагаются в зоне борта пневматической шины, с одной стороны, и в плечевой зоне (не важно какой), с другой стороны. Или же можно изготавливать каждый из полукаркасов последовательно. Можно также реализовать усиливающую арматуру гребня пневматической шины, причем в этом случае оба конца траектории укладки располагаются в любом месте под беговой дорожкой протектора, например, в каждой из плечевых частей.
Система средств укладки, а именно, система с качающимися рычагами 3 и прижимные устройства 2, включая двигатель и механизм передачи движения, образует подсистему, которая легко может быть размещена перед сердечником надлежащим образом и может быть убрана от этого сердечника для того, чтобы, например, разместить рядом с ним другие устройства, используемые для изготовления пневматической шины или для перемещения данного сердечника на другие технологические посты изготовления пневматической шины.
Предлагаемое изобретение позволяет изготовить пневматическую шину при помощи способа, в соответствии с которым изготавливают усиливающую арматуру на основе одной нити, непрерывно подаваемой, по потребности, с помощью соответствующего распределительного устройства, используя для этого по существу тороидальную монтажную форму, на которой постепенно формируют упомянутую усиливающую арматуру, укладывая дуги упомянутой нити в соответствии с траекторией, требуемой для этой нити, на поверхность монтажной формы посредством любого из описанных выше устройств для наложения участков нити от одного борта изготавливаемой пневматической шины до другого ее борта. В частности, как это было показано выше, предлагаемый способ позволяет изготовить усиливающую арматуру, укладывая рядом друг с другом дуги нити на поверхность монтажной формы.



Изобретение относится к шинной промышленности и может быть использовано при изготовлении покрышек пневматических шин. Устройство для изготовления усиливающей арматуры для пневматической шины, сформированной из одной нити, подаваемой непрерывно, посредством соответствующего распределительного механизма, и предназначенное для использования совместно с монтажной формой, имеющей тороидальную форму, на которой формируют усиливающую арматуру, укладывая дугами нить вдоль траектории, требуемой для этой нити, на поверхность монтажной формы. Устройство содержит направляющее средство, в котором нить имеет возможность свободного скольжения, систему с качающимися рычагами, содержащую один первый рычаг, выполненный с возможностью качания относительно геометрической оси вращения. Качающийся рычаг содержит головку, удаленную от его геометрической оси вращения, и средства управления, предназначенные для придания качающемуся рычагу колебательного движения вокруг его геометрической оси вращения. Головка качающегося рычага обеспечивет транспортировку направляющего средства непосредственно или косвенно, посредством одного или нескольких других рычагов. Устройство предназначено для использования совместно с прижимными устройствами, расположенными рядом с каждым из концов траектории для прижатия нити к монтажной форме на концах этой траектории. Геометрическая ось вращения первого рычага пересекает монтажную форму в положении функционирования. Радиальное расстояние между направляющим средством и геометрической осью вращения качающегося рычага является изменяемым. Изобретение обеспечивает высокую скорость подачи нити и точность ее укладки на монтажной форме. 2 н. и 19 з.п. ф-лы, 12 ил.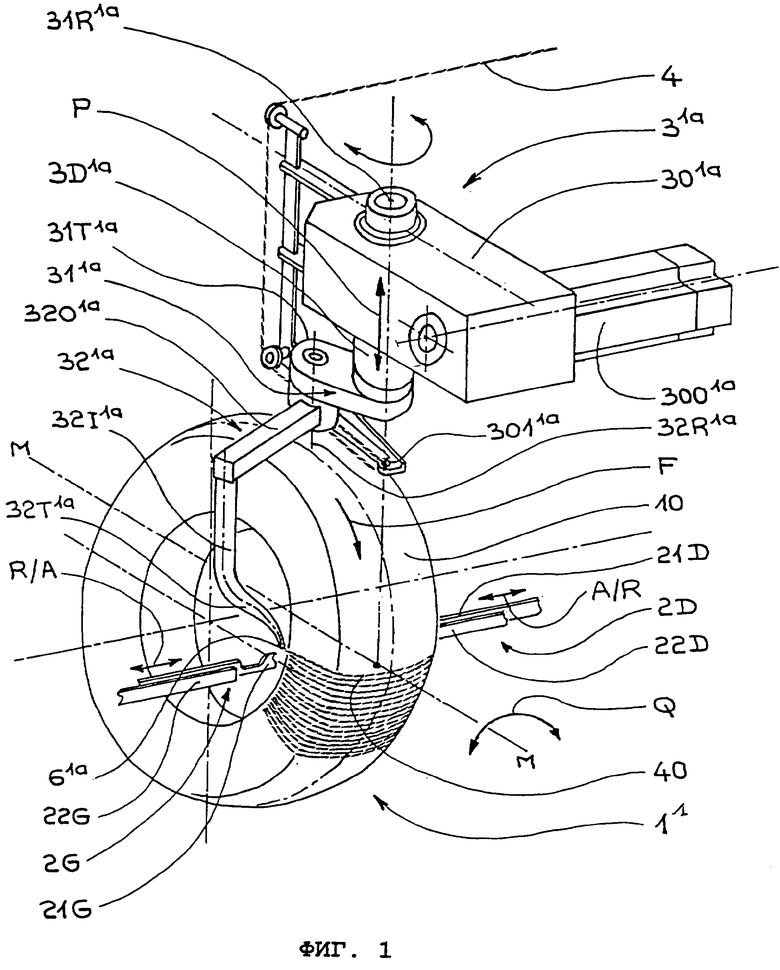
| Устройство для электрической сигнализации о качестве работы подталкивающего паровоза | 1939 |
|
SU58055A1 |
| US 5395476 А, 07.03.1995 | |||
| US 4370183 А, 25.01.1983 | |||
| US 4795523 А, 03.01.1989 | |||
| ЕР 0353511 A1, 07.02.1990 | |||
| Штамм рSеUDомоNаSRатноNIS Т используемый для очистки промышленных сточных вод от волгоната | 1980 |
|
SU962304A1 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ УСИЛИВАЮЩЕГО СЛОЯ КАРКАСА ПОКРЫШЕК | 1983 |
|
SU1420797A1 |

