Изобретение относится к радиотехнике и может быть использовано в системах пассивной радиолокации.
Известен способ обнаружения и определения координат источника радиоизлучения, основанный на приеме сигнала передатчика приемниками, установленными на известных стационарных пунктах, передаче с приемников на пункт обработки данных о факте обнаружения сигналов, где по координатам приемников, принимающих сигналы, определяют координаты объектов. (Патент Франции №2630565, кл. G 08 В 7/06, 1988 г.).
Недостатками способа является низкая вероятность обнаружения и точность определения координат объектов. Соотношение вероятности обнаружения и точности определения координат носит противоречивый характер. Для уменьшения погрешности определения координат необходимо увеличивать порог обнаружения до уровня, обеспечивающего регистрацию сигнала источника только в одном пункте приема. В этом случае падает вероятность обнаружения в области между пунктами приема. Снижение порогового уровня приводит к срабатыванию обнаружителей одновременно нескольких пунктов приема, а погрешность определения координат достигает величины удаления объекта от геометрического центра, образованного усреднением координат приемных пунктов.
Наиболее близким к предлагаемому по технической сущности и достигаемому положительному эффекту является способ обнаружения и определения координат источника радиоизлучения, включающий прием радиоизлучения источника не менее чем в трех пространственно разнесенных пунктах приема с последующей передачей принятых радиосигналов на центральный пункт, измерение взаимных задержек между принятыми сигналами и вычисление координат по взаимным задержкам при равенстве нулю их суммы на замкнутом через пункты приема контуре, причем измерение задержек выполняют путем определения положения максимума квадрата модуля комплексных взаимных корреляционных функций каждой пары принятых радиосигналов, а вычисление координат - по положению минимума среднего по совокупности пар пунктов приема квадрата разности измеренных задержек и расчетного взаимного запаздывания моментов прихода электромагнитных волн из каждой точки пространства в каждую пару пунктов приема. (Патент РФ №2013785, G 01 S 13/00, 1994 г.).
Недостатками способа являются низкая вероятность обнаружения и точность определения координат. Это связано с тем, что в силу различного удаления объектов от пунктов приема, изменений уровней радиосигналов при распространении радиоволн различаются и соответствующие значения отношения сигнал-шум, эти различия в способе не учитываются, что снижает вероятность обнаружения и точность определения координат. Низкое отношение сигнал-шум хотя бы в одном из пунктов приема проводит к аномальным погрешностям измерений и к необнаружению (пропуску) объекта. Для сигналов с периодической модуляцией, например частотной, при произведении частоты модуляции на значение задержки, большем 0,5, взаимные корреляционные функции имеют многопиковый характер, что также приводит к аномальным погрешностям измерения и обнаружения.
Задачей данного изобретения является повышение вероятности обнаружения и точности определения координат источников радиоизлучения.
Решение поставленной задачи достигается за счет того, что в известном способе обнаружения и определения координат источника радиоизлучения, включающем прием радиоизлучения источника не менее чем в трех пространственно разнесенных пунктах приема с последующей передачей принятых радиосигналов на центральный пункт, определение квадрата модуля комплексных взаимных корреляционных функций каждой пары принятых радиосигналов и взаимного запаздывания моментов прихода электромагнитных волн из каждой точки пространства в каждую пару пунктов приема, дополнительно измеряют значения энергии принятых радиосигналов, определяют попарные произведения значений энергии различных радиосигналов, которые усредняют по совокупности пар радиосигналов, а в каждой точке пространства определяют соответствующие запаздываниям моментов прихода электромагнитных волн значения квадратов модулей комплексных взаимных корреляционных функций, которые усредняют по совокупности пар радиосигналов, находят отношение усредненных квадратов модулей комплексных взаимных корреляционных функций к усредненным попарным произведениям значений энергии радиосигналов, по максимуму которого, путем сравнения с порогом обнаружения, и его положению определяют наличие излучения и координаты источника, причем значение порога обнаружения устанавливают, исходя из допустимого уровня ложной тревоги, времени и количества пунктов приема.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного наличием, во-первых, новых действий над сигналом: измеряют значения энергии принятых радиосигналов, определяют попарные произведения значений энергии, которые усредняют по совокупности пар радиосигналов, определяют в каждой точке пространства соответствующие запаздываниям моментов прихода электромагнитных волн значения квадратов модулей комплексных взаимных корреляционных функций, усредняют их по совокупности пар радиосигналов, находят отношение усредненных квадратов модулей комплексных взаимных корреляционных функций к усредненным попарным произведениям значений энергии радиосигналов, во-вторых, нового порядка выполнения действии, в-третьих, новых условии осуществления действий: наличие излучения и координаты источника определяют по максимуму и положению отношения результатов усреднения, значение порога обнаружения устанавливают, исходя из допустимого уровня ложной тревоги, времени и количества пунктов приема.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
Результаты статистического синтеза при неопределенности о пространственном положении источника излучения, амплитуде и фазе радиосигналов в пунктах приема, дисперсии шума, показывают, что кроме квадратов модулей взаимных корреляционных функций сигналов (прототип) существенными элементами достаточной статистики при решении задачи обнаружения и определения координат являются значения энергии принятых сигналов. Как в значениях взаимных корреляционных функций, так и в значениях энергии сигналов содержится информация об отношениях сигнал-шум. При оценивании задержки (прототип) эта информация теряется. Преобразование достаточных статистик в решающую статистику согласно изобретению (определение попарных произведений значений энергии с усреднением по совокупности пар радиосигналов, определение в каждой точке пространства соответствующих запаздываниям значений квадратов модулей комплексных взаимных корреляционных функций с усреднением по совокупности пар радиосигналов, нахождение отношения результатов усреднения) обеспечивает автоматический учет отношений сигнал-шум в пунктах приема и, как следствие, повышение точности измерений и вероятности обнаружения.
Физической основой наличия оптимального статистического решения служит функциональная взаимосвязь между сигналами, при которой в окрестности истинных координат стремится к максимуму каждая взаимная корреляционная функция и их преобразованная совокупность (решающая статистика). Представление решающей статистики в виде отношения обеспечивает ее инвариантность к дисперсии шума, что позволяет устанавливать фиксированный для заданной вероятности ложной тревоги порог обнаружения, а объединение в решающей статистике информации о совокупности взаимных корреляционных функций - повысить вероятность правильного обнаружения и точность определения координат источника радиоизлучения.
Именно интегральный учет информации о сигналах всех пунктов приема в соответствии с предложенными новыми действиями, условиями и порядком их выполнения позволяет повысить вероятность обнаружения и точность определения координат источника радиоизлучения.
На фиг.1 приведена структурная схема системы определения координат, реализующей предложенный способ, на фиг.2 - амплитудный спектр радиосигнала, на фиг.3 - квадрат модуля взаимной корреляционной функции, на фиг.4 - пространственное изображение преобразованного на плоскость координат квадрата модуля взаимной корреляционной функции, на фиг.5 - пространственное изображение решающей статистики, на фиг.6 - взаимное размещение пунктов приема (кружки) и источника радиоизлучения (крестик) в прямоугольной системе координат, на фиг.7 - программа исследовательской модели в системе Mathcad-2000.
Система, реализующая предложенный способ, содержит пространственно разнесенные пункты приема 1.1-1.N, каждый из которых включает приемную антенну 2.1 (2.N), подключенную к первому входу цифрового радиоприемного устройства 3.1 (3.N), выходом подключенного к первому входу аппаратуры передачи данных 4.1 (4.N), и центральный пункт 5, содержащий аппаратуру передачи данных 6, подключенный к ее первому выходу входной процессор быстрого преобразования Фурье 7, оперативные запоминающие устройства 8.1-8.2, постоянные запоминающие устройства 9.1-9.2, буферные запоминающие устройства 10.1-10.3, умножители 11.1-11.2, процессор обратного быстрого преобразования Фурье 12, блоки определения квадратов модуля 13.1-13.2, преобразователь функций 14, содержащий постоянное запоминающее устройство 9.2 и оперативное запоминающее устройство 8.2, сумматор 15, накапливающие сумматоры 16.1-16.3, делитель 17, блок определения максимума функции 18 и пороговый элемент 19.
Первые выходы аппаратуры передачи данных 4.1 (4.N) каждого из пунктов приема 1.1-1.N связаны линиями связи с входом аппаратуры передачи данных 6 центрального пункта 5. Второй выход аппаратуры передачи данных 6 связан со вторыми входами аппаратуры передачи данных 4.1 (4.N), вторые выходы которых соединены со вторыми входами цифровых радиоприемных устройств 3.1 (3.N). Процессор 7 выходом подключен к первому входу оперативного запоминающего устройства 8.1, ко второму входу которого подключен выход постоянного запоминающего устройства 9.1. Выход оперативного запоминающего устройства 8.1 соединен с входами буферных запоминающих устройств 10.1-10.2. Буферное запоминающее устройство 10.1 выходом соединено с первым входом умножителя 11.1 и через блок 13.1, накапливающий сумматор 16.1 с первым входом умножителя 11.2 и через его выход, накапливающий сумматор 16.3 - с первым входом делителя 17.
Буферное запоминающее устройство 10.2 выходом соединено со вторым входом умножителя 11.1 и через блок 13.3, накапливающий сумматор 16.2 со вторым входом умножителя 11.2.
Выход умножителя 11.1 через процессор 12, блок определения квадрата модуля 13.2 подключен к первому входу оперативного запоминающего устройства 8.2 преобразователя 14. Постоянное запоминающее устройство 9.2 через второй вход оперативного запоминающего устройства 8.2 подключено к первому входу сумматора 15 и через его выход ко второму входу делителя 17 и входу буферного запоминающего устройства 10.3, выход которого соединен со вторым входом сумматора 15. Выход делителя 17 соединен с входом блока определения максимума функции 18 и через его первый выход с входом порогового элемента 19, выход которого является первым выходом системы. Вторым выходом системы является второй выход блока 18 определения максимума функции.
Цифровые радиоприемные устройства 3.1-3.N настроены на частоту объекта, управляются и синхронизируются по управляющему (второму) входу сигналами, поступающими от аппаратуры передачи данных 6 центрального пункта через вторые выходы аппаратуры передачи данных 4.1-4.N пунктов приема. В вариантном исполнении возможно применение ретрансляции принятых радиосигналов, как это выполнено в способе-прототипе с установкой многоканального (по числу пунктов приема) цифрового радиоприемного устройства на центральном пункте. Информация в постоянные запоминающие устройства 9.1, 9.2 заносится до начала функционирования системы: в постоянное запоминающие устройство 9.1 - в виде WP-матрицы объединения сигналов в пары, содержит 2·К элементов, где К - число пар; в постоянное запоминающее устройство 9.2 - в виде ТТ0 матрицы взаимных запаздываний, содержит V·К·V элементов, где V - число градаций по осям координат.
Оперативное запоминающее устройство 8.1 рассчитано на T·2·N комплексных чисел, где Т - задаваемый объем выборки, буферные запоминающие устройства 10.1, 10.2 - на Т-2 комплексных чисел, оперативное запоминающее устройство 8.2 на Т-2 чисел, буферное запоминающее устройство 10.3 на V·V чисел. Умножитель 11.1 обеспечивает перемножение комплексного (по первому входу) на комплексно сопряженное (по второму входу) число. Процессоры быстрого преобразования Фурье 7, 12 обеспечивают преобразование комплексных массивов Т-2 чисел. Значение порога в элементе 15 фиксированное, устанавливается вне зависимости от параметров сигналов и шумов, исходя из допустимого уровня ложной тревоги, количества пунктов приема и времени приема.
Принцип функционирования системы состоит в следующем.
Перед началом работы осуществляют синхронизацию, определяют и устанавливают исходные параметры элементов системы.
1. Период дискретизации в приемных устройствах (3.1-3.N) согласно теореме Котельникова δt≤1/2·ΔF, где ΔF - полоса пропускания приемных устройств, и объем выборки Т из условия обеспечения времени приема Т·δt не менее удвоенного значения времени распространения электромагнитных волн между пунктами приема с максимальным взаимным удалением.
2. Количество N≥3 пространственно разнесенных пунктов приема, их номера n=0,1, ..., N-1 и координаты (Хn, Yn).
3. Параметры рабочей зоны системы: координаты центра (XC, YC), максимальное отклонение DR от центра по осям координат, шаг квантования пространства Δ из условия обеспечения требуемой инструментальной точности, число градаций по осям координат V=2·〈DR/Δ〉, где 〈·〉 операция округления до целого.
Точки пространства в пределах рабочей зоны в соответствии с выбранным шагом дискретизации нумеруют i, j=-0,1, ..., V-1 соответственно по оси ординат и оси абсцисс, при этом (i, j)-я точка имеет координаты

Таким образом, в рассматриваемом варианте реализации предусмотренные способом действия над сигналами осуществляют в дискретных точках пространства, которое ограничивают пределами рабочей зоны системы (определяемой, например, из условия прямой радиовидимости) и предварительно квантуют с заданным шагом квантования.
4. Количество К и порядок объединения в пары принятых радиосигналов при обработке информации, в виде WP-матрицы, элементами которой являются номера пунктов приема WPq,k, где k=0,1, ..., К-1 - номер пары, q=0; 1 - номер сигнала (пункта приема) в паре. Таким образом, WP-матрица содержит 2·К элементов. Максимальная точность обеспечивается при переборе всех K=N·(N-1)/2 сочетаний пар сигналов, например, из условия WP0,k=0,1, ..., N-2, WP1,k=WP0,k+1, WP0,k+2,...,N-1. Значения элементов WP-матрицы заносят в постоянное запоминающие устройство 9.1.
5. Взаимное запаздывание моментов прихода электромагнитных волн из каждой точки пространства в каждую пару пунктов приема

где  - время распространения электромагнитных волн из (i,j)-й точки пространства в WPq,k·V-йпункт приема, С - скорость света.
- время распространения электромагнитных волн из (i,j)-й точки пространства в WPq,k·V-йпункт приема, С - скорость света.
Значение запаздывания в (2) дано в единицах периода дискретизации для согласования при последующей обработке.
ТТ0 матрица содержит V×К·V элементов. Значения ТТ0 матрицы заносят в постоянное запоминающие устройство 9.2.
6. Вероятность ложной тревоги Рлт в элементах пространства и порог обнаружения, который рассчитывают по формуле

где Т'=Т·2·ΔF·δt - количество некоррелированных отсчетов выборки, gbeta(·, ·, ·) - функция, обратная бета-распределению (см. далее, формула (12)).
Таким образом, значение порога зависит только от допустимого уровня (вероятности) ложной тревоги, времени приема (или объема выборки) и количества пунктов приема (или однозначно с ним связанного количества пар радиосигналов). Значение порога устанавливают в пороговом элементе 19.
По завершении этапа подготовки, радиоизлучение источника A(t) синхронно во всех пунктах приема 1.1-1.N принимают с помощью антенн 2.1-2.N и цифровых радиоприемных устройств 3.1-3.N, преобразуя в совокупность дискретных временных отсчетов радиосигнала

где t=0,1, ..., T-1 - номер временного отсчета, τn, ηn - соответственно задержка и ослабление радиосигнала при распространении в n-й пункт приема, ψt,n - отсчеты шума приемного устройства.
Принятые радиосигналы передают с помощью аппаратуры передачи данных 4.1-4.N, 6 на центральный пункт 5.
После приема заданной выборки Т с использованием дискретного преобразования Фурье в процессоре 7 получают комплексные спектры

где f=0,1, ..., F-1 - номер спектрального коэффициента, F=T - число спектральных коэффициентов, i1 - мнимая единица.
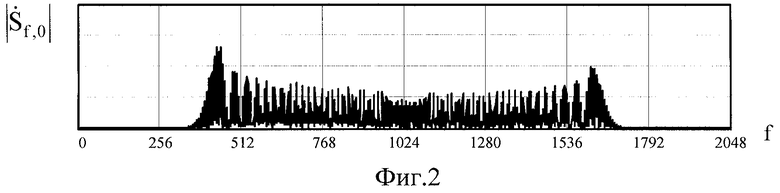
Вид амплитудного спектра сигнала с синусоидальной частотной модуляцией показан на фиг.2.
Результаты преобразования (5) заносят в оперативное запоминающее устройство 8.1, последовательно считывают комплексные спектры сигналов различных пар (в порядке, определяемом данными постоянного запоминающего устройства 9.1) и заносят спектр первого сигнала пары в буферное запоминающее устройство 10.1, а второго - в буферное запоминающее устройство 10.2, после чего выполняют попарную обработку различных радиосигналов. При этом в блоках 13.1, 16.1 и 13.3, 16.2 определяют энергию каждого из сигналов пары
Таким образом, в предлагаемом варианте реализации измерение значений энергии принятых радиосигналов включает операции (5), (6).
В умножителе 11.2 определяют попарные произведения значений энергии, то есть значения энергии различных радиосигналов каждой пары пространственно разнесенных пунктов перемножают, а затем усредняют по совокупности пар радиосигналов в накапливающем сумматоре 16.3

Для каждой пары принятых радиосигналов определяют квадрат модуля комплексной взаимной корреляционной функции, для чего перемножают в умножителе 11.1 комплексные спектры сигналов и выполняют в процессоре 12 обратное дискретное преобразование Фурье с определением квадрата модуля в блоке 13.2
где, tt=0,1, ..., 2·T-1 - номер временного сдвига между сигналами в единицах периода дискретизации, черта над величиной означает ее комплексное сопряжение.
Для представления отсчетов квадрата модуля комплексной взаимной корреляционной функции в естественном порядке при записи в оперативное запоминающее устройство 8.2 делают перестановку ρtt+F,k=ρtt,k при tt=0,1, ..., T-1, ρtt-F,k=ρtt,k при tt=Т,Т+1, ..., 2·Т-1. При этом нулевое значение временного сдвига соответствует точке tt=Т.
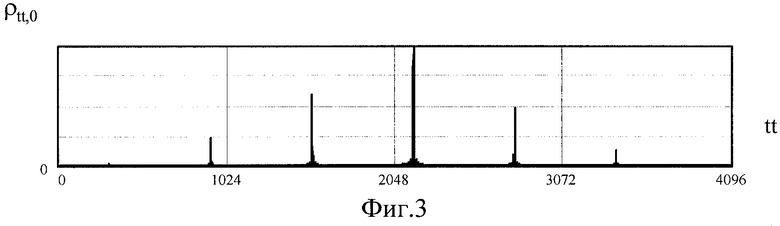
Указанный порядок (5), (8) получения комплексной взаимной корреляционной функции известен и описан, например, в [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М., Мир, 1978 г., стр.74-76, 445-446]. В приведенном варианте практической реализации, значения квадратов модулей комплексных взаимных корреляционных функций представляются с дискретностью, равной периоду дискретизации сигналов во времени. Пример квадрата модуля взаимной корреляционной функции для радиосигнала с синусоидальной частотной модуляцией показан на фиг.3. Функция имеет многопиковый характер, что и приводит к аномальным погрешностям измерения задержки в способе-прототипе.
После выполнении операции (8) в преобразователе функций 14 с применением оперативного запоминающего устройства 8.2, управляемого постоянным запоминающим устройством 9.2, для каждой точки пространства и каждой пары приемных пунктов определяют соответствующие взаимным запаздываниям (2) значения квадратов модулей взаимных корреляционных функций, то есть значения квадратов модулей взаимных корреляционных функций в точках временного сдвига равных взаимному запаздыванию (плюс F с учетом особенности нумерации значений частотного сдвига)

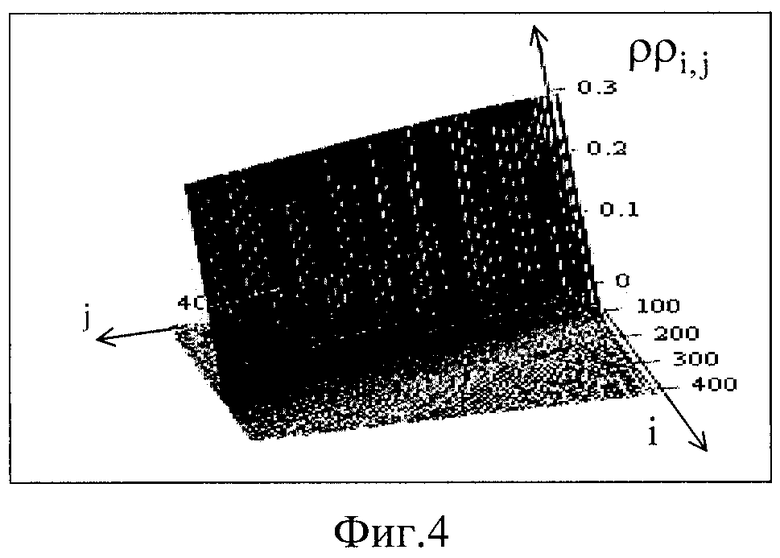
Пространственное изображение преобразованного на плоскость координат квадрата модуля взаимной корреляционной функции (9) показано на фиг.4. Эта функция представляет собой тело неопределенности в пространстве с одинаковыми значениями в точках, где взаимное запаздывание равно временному сдвигу (на линии соответствующей гиперболы).
Значения квадратов модуля взаимных корреляционных функций (9) в каждой точке пространства усредняют (с использованием сумматора 15 и буферного запоминающего устройства 10.2, куда заносятся промежуточные результаты суммирования данных с выхода преобразователя 14) по совокупности пар приемных пунктов

После чего в делителе 17 находят отношение результатов усреднения (10) и (7), получая решающую статистику
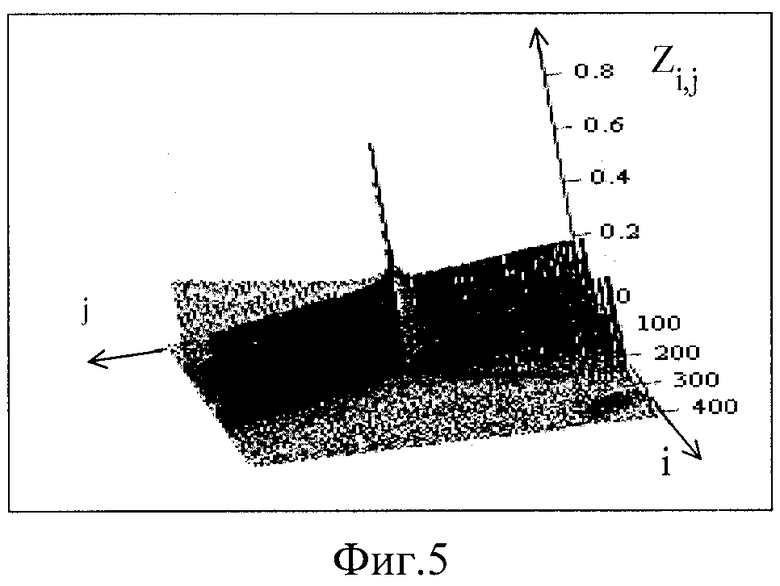
В результате суммирования по совокупности пар приемных пунктов (10) в решающей статистике содержится информация не только о положении максимума квадратов модулей комплексных взаимных корреляционных функций (прототип), но всей совокупности их значений, энергия принятых сигналов локализуется в окрестности координат источника, что видно из примера фиг.5. Поскольку суммирование выполняется с весом обратно пропорциональным ослаблению радиосигналов при распространении, то большее значение имеют квадраты модулей взаимных корреляционных функций для пар сигналов большей амплитуды, полученные с меньшими погрешностями измерений, что повышает точность определения координат и вероятность обнаружения.
Значение решающей статистики при большом отношении сигнал-шум стремится к 1 вне зависимости от значений коэффициентов ослабления.
В отсутствие сигнала решающая статистика не зависит от интенсивности шума и имеет бета-распределение

с параметрами формы α=К; β=К·Т' где Г(·) - гамма-функция.
При большом объеме выборки среднее значение решающей статистики согласно (12) стремится к нулю. Данная особенность используется для обнаружения сигнала.
В блоке 18 по совокупности всех точек пространства определяют максимальное значение решающей статистики и положение максимума

Максимальное значение в элементе 19 сравнивают с ранее рассчитанным порогом, при превышении которого принимают решение о наличии радиоизлучения с выдачей на выход системы результата обнаружения и координат источника (со второго выхода блока 18) в виде номеров точки пространства (14) или пересчитанных в метрическую систему в соответствии с формулой (1).
Эффективность изобретения выражается в повышении вероятности обнаружения и точности измерения координат источников радиоизлучения. Для оценки количественных значений выполнено моделирование способа. Моделировалась система из 3-х пунктов приема с размещением согласно фиг.6 (кружками показано размещение пунктов приема, крестиком - источника радиоизлучения.). Программа модели в системе Mathcad-2000 приведена на фиг.7. Приняты следующие основные параметра: полоса пропускания приемных устройств 10 МГц, период дискретизации 0,05 мкс, излучаемый сигнал имеет синусоидальную частотную модуляцию с девиацией частоты 3 МГц, ослабление сигналов в соответствии с квадратичной формулой Введенского пропорционально квадрату расстояния до пунктов приема, вероятность ложной тревоги 10-3 (порог обнаружения 4,222·10-3). В результате моделирования установлено, что при частоте модуляции более 18 кГц с применением способа-прототипа возникают пропуски сигналов (с вероятностью, близкой к единице) и аномальные погрешности измерений, превышающие единицы километров. Указанные погрешности и пропуски сигналов устраняются предлагаемым способом при увеличении частоты модуляции до 32 кГц. Пороговое отношение сигнал-шум (отношение амплитуды сигнала к среднему квадратическому значению шума, при котором обеспечивается обнаружение сигнала с вероятностью правильного обнаружения не ниже 0,9, а среднеквадратические ошибки определения координат не превышают 100 м) снижается предлагаемым способом по сравнению с прототипом в 3,5 раза (до 0,25). Относительно способа-прототипа сокращается число операций максимизации (исключаются операции максимизации каждой из взаимных корреляционных функций), что упрощает реализацию способа обнаружения и определения координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2378660C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2294546C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2236021C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| СПОСОБ СОЗДАНИЯ ОТВЕТНЫХ ПОМЕХ | 2011 |
|
RU2510138C2 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
Изобретение относится к пассивной радиолокации. Технический результат заключается в увеличении вероятности обнаружения и точности определения координат объектов. Для этого в известном способе определения координат источника TDOA (по разности времен прихода сигналов) дополнительно определяют сигналы, соотношение сигнал/шум в которых максимально и им присваивают большие весовые коэффициенты, другим сигналам соответственно меньшие весовые коэффициенты. 7 ил.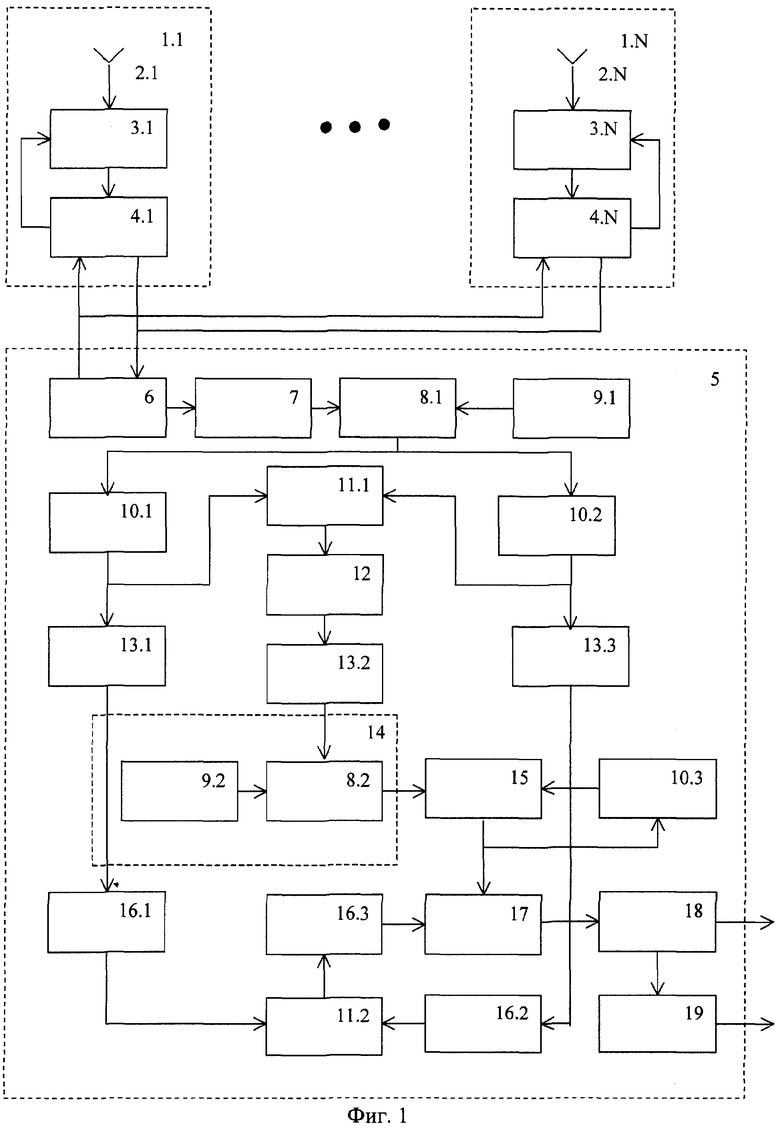
Способ обнаружения и определения координат источника радиоизлучения, включающий прием радиоизлучения источника не менее чем в трех пространственно разнесенных пунктах приема с последующей передачей принятых радиосигналов на центральный пункт, определение квадрата модуля комплексных взаимных корреляционных функций и взаимного запаздывания моментов прихода электромагнитных волн, отличающийся тем, что дополнительно измеряют значения энергии принятых радиосигналов, определяют попарные произведения значений энергии различных радиосигналов, определяют значения квадратов модулей комплексных взаимных корреляционных функций, которые усредняют по совокупности пар радиосигналов, находят отношение усредненных квадратов модулей комплексных взаимных корреляционных функций к усредненным попарным произведениям значений энергии радиосигналов, по максимуму которого путем сравнения с порогом обнаружения и его положению определяют наличие излучения и координаты источника, причем значение порога обнаружения устанавливают, исходя из допустимого уровня ложной тревоги, времени и количества пунктов приема.
| US 6160758, 12.12.2000 | |||
| US 6469665 A1, 22.10.2002 | |||
| US 6424837 B1, 23.07.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |

