Изобретение относится к радиотехнике и может быть использовано в пассивных системах радиоконтроля для обнаружения и локализации по частоте, времени, азимуту и углу места сложных сигналов.
С появлением и совершенствованием систем связи, локации и управления, использующих сложные сигналы с большой базой, излучаемая мощность которых специальным образом распределяется в частотно-временной области (широкополосные одночастотные псевдослучайные сигналы и многочастотные сигналы со скачкообразным изменением частоты), возникают проблемы их эффективного радиоконтроля.
Известен способ обнаружения и локализации сложных сигналов [1], включающий:
прием сигнала двумя пространственно разнесенными приемными каналами;
корреляцию во временной области выходных сигналов приемников и формирование сигнала, описывающего взаимную корреляционную функцию сигнала, принятого двумя приемниками;
фильтрацию сигнала, описывающего во временной области взаимную корреляционную функцию, и выделение только центральной части взаимной корреляционной функции;
преобразование выделенной центральной части взаимной корреляционной функции в комплексную взаимную спектральную плотность сигнала;
измерение угла линии фазового наклона взаимной спектральной плотности для определения направления прихода сигнала;
индикацию результатов обнаружения сигнала.
Ограниченные возможности избирательности по пространству существенно снижают эффективность данного способа на практике.
Более эффективным является способ обнаружения и локализации сложных сигналов [2], принятый за прототип и включающий:
1. Когерентный прием временных сигналов xn(t) антеннами, входящими в N - элементную решетку, где n=1, (N - номер антенны;
2. Синхронное преобразование принятых сигналов xn(t) в цифровые сигналы xn(z), где z - номер временного отсчета сигнала;
3. Скользящее во времени преобразование цифровых сигналов xn(z) для получения с заданной дискретностью по времени и частоте комплексной спектральной плотности  сигнала каждой антенны, где q - номер временного отрезка преобразования,
сигнала каждой антенны, где q - номер временного отрезка преобразования,  , a l - номер частотного отсчета,
, a l - номер частотного отсчета,  .
.
Другими словами, входные сигналы на каждом временном интервале разбиваются на частотные каналы.
В результате выполнения этой операции формируется частотно-временная матрица  N-мерных векторов спектральных плотностей
N-мерных векторов спектральных плотностей  с элементами
с элементами  ;
;
4. Перемножение на каждой дискретной частоте l комплексно сопряженной спектральной плотности  антенны, выбранной в качестве опорной, и спектральных плотностей остальных антенн для формирования одночастотного комплексного дискретного амплитудно-фазового распределения (АФР)
антенны, выбранной в качестве опорной, и спектральных плотностей остальных антенн для формирования одночастотного комплексного дискретного амплитудно-фазового распределения (АФР)  , сигнала, зарегистрированного в q-м временном интервале.
, сигнала, зарегистрированного в q-м временном интервале.
Эту операцию можно рассматривать как формирование частотно-временной матрицы  (одночастотных комплексных дискретных АФР
(одночастотных комплексных дискретных АФР  , представляющих собой N-мерные векторы с элементами
, представляющих собой N-мерные векторы с элементами  . В свою очередь величина может рассматриваться как одночастотная комплексная дискретная радиоголограмма. В результате формируются АФР для каждого частотно-временного элемента, отличающегося положением (q, l) в анализируемой частотно-временной области.
. В свою очередь величина может рассматриваться как одночастотная комплексная дискретная радиоголограмма. В результате формируются АФР для каждого частотно-временного элемента, отличающегося положением (q, l) в анализируемой частотно-временной области.
5. Определение комплексных коэффициентов пространственной взаимной корреляции одночастотного АФР, полученного в каждом частотном канале, с одночастотными АФР, полученными в остальных частотных каналах полосы приема в q-м временном интервале.
В результате данной операции формируется блочная вектор-строка комплексных коэффициентов взаимной корреляции  элементы которой описываются формулой
элементы которой описываются формулой  где
где  - нормированные элементы вектор-строки
- нормированные элементы вектор-строки  с элементами
с элементами  a r - номер частотного канала,
a r - номер частотного канала,  l≠r. При этом использовано обозначение скалярного произведения и нормы N - мерных комплексных векторов в виде
l≠r. При этом использовано обозначение скалярного произведения и нормы N - мерных комплексных векторов в виде 
6. Сравнение модулей коэффициентов корреляции  с порогом и объединение сигналов с частотами, на которых превышен порог, в i-й сигнал, который идентифицируется как обнаруженный сигнал с полосой частот δƒi, если полоса δƒi непрерывна, или как многочастотный сигнал с полосой частот δƒi, если полоса δƒi дискретно-непрерывна, принадлежащий одному передатчику с полосой частот δƒi, где i=1...Р, а Р - число обнаруженных передатчиков из числа одновременно попадающих в текущую полосу приема;
с порогом и объединение сигналов с частотами, на которых превышен порог, в i-й сигнал, который идентифицируется как обнаруженный сигнал с полосой частот δƒi, если полоса δƒi непрерывна, или как многочастотный сигнал с полосой частот δƒi, если полоса δƒi дискретно-непрерывна, принадлежащий одному передатчику с полосой частот δƒi, где i=1...Р, а Р - число обнаруженных передатчиков из числа одновременно попадающих в текущую полосу приема;
7. Усреднение одночастотных АФР i-го сигнала в полосе частот δƒi и получение усредненного АФР  где al - двоичные числа (0, 1), отличные от нуля в полосе частот δƒi,
где al - двоичные числа (0, 1), отличные от нуля в полосе частот δƒi,  - индекс, соответствующий средней частоте сигнала с шириной спектра δƒi;
- индекс, соответствующий средней частоте сигнала с шириной спектра δƒi;
8. Использование усредненного АФР  i-го сигнала для определения реальной части его двумерного комплексного углового спектра
i-го сигнала для определения реальной части его двумерного комплексного углового спектра  где dn(m, k) - диаграмма направленности n-й антенны, m=0...М-1 - текущий номер узла сетки по азимуту, М - число узлов по азимуту, k=0...К-1 - текущий номер узла сетки наведения решетки по углу места, К - число узлов по углу места, a
где dn(m, k) - диаграмма направленности n-й антенны, m=0...М-1 - текущий номер узла сетки по азимуту, М - число узлов по азимуту, k=0...К-1 - текущий номер узла сетки наведения решетки по углу места, К - число узлов по углу места, a  - модельная фазирующая функция, зависящая от конфигурации антенной решетки;
- модельная фазирующая функция, зависящая от конфигурации антенной решетки;
9. Определение азимутального и угломестного пеленгов i-го сигнала, обнаруженного в полосе приема, по максимуму реальной части  двумерного комплексного углового спектра.
двумерного комплексного углового спектра.
Основу данного способа составляет оценка угловой близости отдельных составляющих поля источника радиоизлучения с использованием комплексной взаимной корреляции одночастотных АФР. Способ-прототип эффективен при обнаружении и локализации многочастотных сигналов со скачкообразным изменением частоты при условии, что ширина частотного канала анализа незначительно отличается от ширины спектра сигнала на отдельной частотной позиции.
Однако в условиях априорной неопределенности относительно полосы частот принимаемых сигналов ширина каждого частотного канала анализа выбирается в несколько раз уже самого узкополосного сигнала. Как следствие, многочастотные сигналы со скачкообразным изменением частоты узкополосного сигнала обнаруживаются с потерей эффективности, а широкополосные одночастотные сигналы с малой спектральной плотностью мощности не отличаются от шумов. Другими словами, способ-прототип не обладает свойствами адаптивности к ширине спектра обнаруживаемых сигналов и теряет свою эффективность при обнаружении и локализации широкополосных многочастотных и одночастотных псевдослучайных сигналов с низкой спектральной плотностью мощности.
Кроме того, к недостаткам способа-прототипа относится ограниченность локализации энергии сигналов только частотной областью анализа. В то же время передатчик сложного сигнала распределяет излучаемую мощность в двумерной частотно-временной области.
Таким образом, из-за неполного согласования частотно-временной области, занимаемой спектром мощности обнаруживаемого сигнала, и частотно-временной области формирования коррелируемых АФР наблюдаются потери мощности сигнала и, как следствие, существенное снижение различимости на фоне шумов и помех сложных одночастотных и многочастотных сигналов с низкой спектральной плотностью мощности, использующих три основных вида широкополосной модуляции [3, стр.10]:
- модуляция путем сдвига, скачков несущей частоты в дискретные моменты времени на величину, задаваемую кодовой последовательностью;
- модуляция несущей частоты цифровой кодовой последовательностью с частотой следования символов, во много раз превосходящей ширину полосы информационного сигнала;
- линейная частотная модуляция импульсов, в результате которой частота несущей изменяется в широкой полосе частот за время, равное длительности импульса.
Повышение эффективности обнаружения и локализации сложных сигналов при использовании способа-прототипа можно обеспечить несколькими известными путями: увеличением базы антенной решетки и увеличением длительности интервала регистрации сигнала для повышения отношения сигнал/шум за счет корреляционного накопления и выделения сигнала на фоне шумов [4]. Однако эти пути радикально не решают проблему, так как только частично повышают эффективность обнаружения и локализации сложных сигналов за счет улучшения пространственной разрешающей способности и повышения отношения сигнал/шум только той части сигнала, которая попадает в один временной отрезок преобразования.
Техническим результатом изобретения является повышение эффективности обнаружения и локализации по частоте, времени, азимуту и углу места более широкого класса сложных сигналов с низкой спектральной плотностью мощности в условиях априорной неопределенности относительно их формы и областей существования.
Технический результат достигается тем, что в способе обнаружения и локализации сложных сигналов, включающем прием и синхронное преобразование в цифровую форму сигналов, принятых антеннами N-элементной решетки, скользящее во времени преобразование цифровых сигналов каждой антенны в комплексные спектральные плотности с заданной дискретностью по времени и частоте и запоминание спектральных плотностей, согласно изобретению из спектральных плотностей формируют пространственные корреляционные матрицы принятых сигналов (КМПС) в отличающихся положением и размерами частотно-временных элементах области приема, затем преобразуют соответствующую КМПС для формирования амплитудно-фазового распределения (АФР) сигналов в каждом частотно-временном элементе, принимают решение об обнаружении и определяют частотно-временные области локализации каждого обнаруженного сигнала путем одновременной идентификации сформированных АФР и согласования частотно-временных областей, занимаемых сформированными АФР и локализуемым сигналом, формируют пространственные корреляционные матрицы обнаруженных сигналов (КМОС) из спектральных плотностей, принадлежащих выявленным областям локализации, определяют азимутальные и угломестные направления прихода каждого обнаруженного сигнала преобразованием КМОС по алгоритму высокого разрешения из подкласса, основанного на анализе собственных значений.
Возможны частные случаи осуществления способа:
1. Идентификацию АФР осуществляют путем взаимной корреляции АФР, сформированных в различных частотно-временных элементах.
Это повышает энергетическую эффективность обнаружения и локализации сигналов.
2. Согласование частотно-временных областей осуществляют путем выбора частотно-временных областей, обеспечивающих максимальное отношение сигнал/шум взаимного корреляционного отклика.
Это также повышает энергетическую эффективность обнаружения и локализации сигналов.
3. Формирование АФР сигналов в каждом частотно-временном элементе осуществляют путем выбора собственного вектора, соответствующего максимальному собственному значению каждой КМПС.
Это повышает отношение сигнал/шум сформированного АФР и повышает эффективность последующего обнаружения и локализации сигналов.
4. Формирование АФР сигналов в каждом частотно-временном элементе также осуществляют путем выбора отдельной строки КМПС.
Это повышает скорость обнаружения и локализации сигналов.
5. Определение азимутальных и угломестных направлений прихода каждого обнаруженного сигнала осуществляют путем выбора в качестве АФР собственного вектора КМОС и его преобразования с использованием подкласса алгоритмов высокого разрешения, основанных на регуляризации.
Это повышает эффективность определения направлений прихода коррелированных сигналов.
5. Определение азимутальных и угломестных направлений прихода каждого обнаруженного сигнала осуществляют путем выбора в качестве АФР отдельной строки КМОС и ее преобразования с использованием подкласса алгоритмов высокого разрешения, основанных на регуляризации.
Это повышает скорость определения направлений прихода сигналов.
6. Определение азимутальных и угломестных направлений прихода каждого обнаруженного сигнала также осуществляют путем сопоставления азимутальных и угломестных направлений прихода каждого обнаруженного сигнала, полученных алгоритмами высокого разрешения различных подклассов.
Это повышает точность и достоверность определения направлений прихода каждого обнаруженного сигнала.
Таким образом, за счет введения операций:
- оптимизации формирования АФР как на этапах обнаружения и локализации, так и на этапе измерения углов прихода сигналов;
- согласования частотно-временной области, занимаемой спектром мощности обнаруживаемого сигнала, и частотно-временной области формирования коррелируемых АФР;
- сопоставления направлений прихода сигналов, получаемых алгоритмами высокого разрешения различных подклассов, минимизирующих потери мощности при обнаружении и пеленговании сигналов, а также исключающих аномальные ошибки пеленгования и, как следствие, значительно повышающих различимость сложных одночастотных и многочастотных сигналов с низкой спектральной плотностью мощности на фоне шумов и помех, удается решить поставленную задачу с достижением технического результата.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства обнаружения и локализации сложных сигналов.
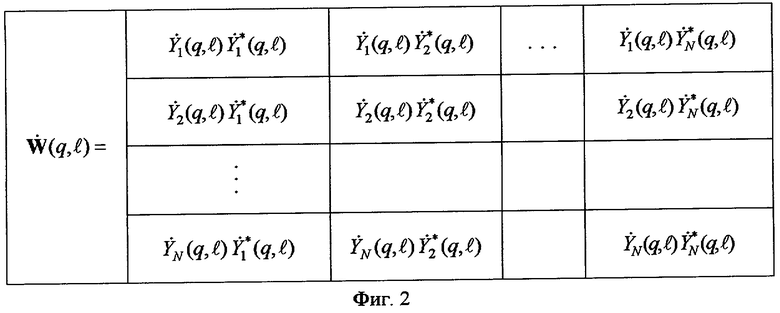
Фиг.2. Структура корреляционной матрицы принятых сигналов (КМПС), формируемой в (q, l)-м частотно-временном элементе минимального размера (Q=1, L=1);
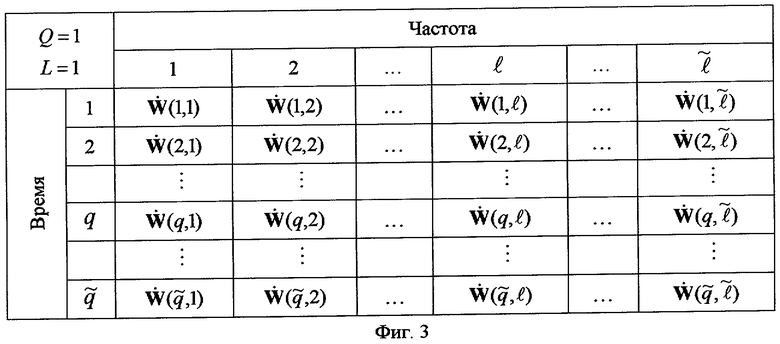
Фиг.3. Совокупность КМПС, формируемых в отличающихся положением частотно-временных элементах минимального размера (Q=1, L=1).
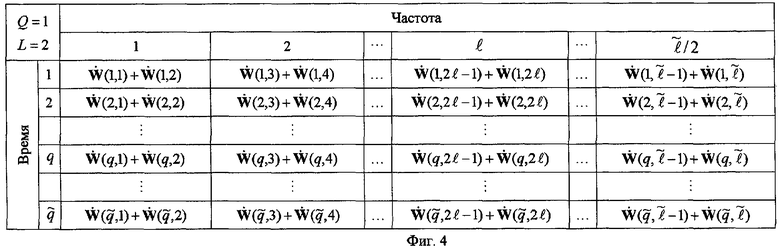
Фиг.4. Совокупность КМПС, формируемых в отличающихся положением частотно-временных элементах размером (Q=1, L=2).
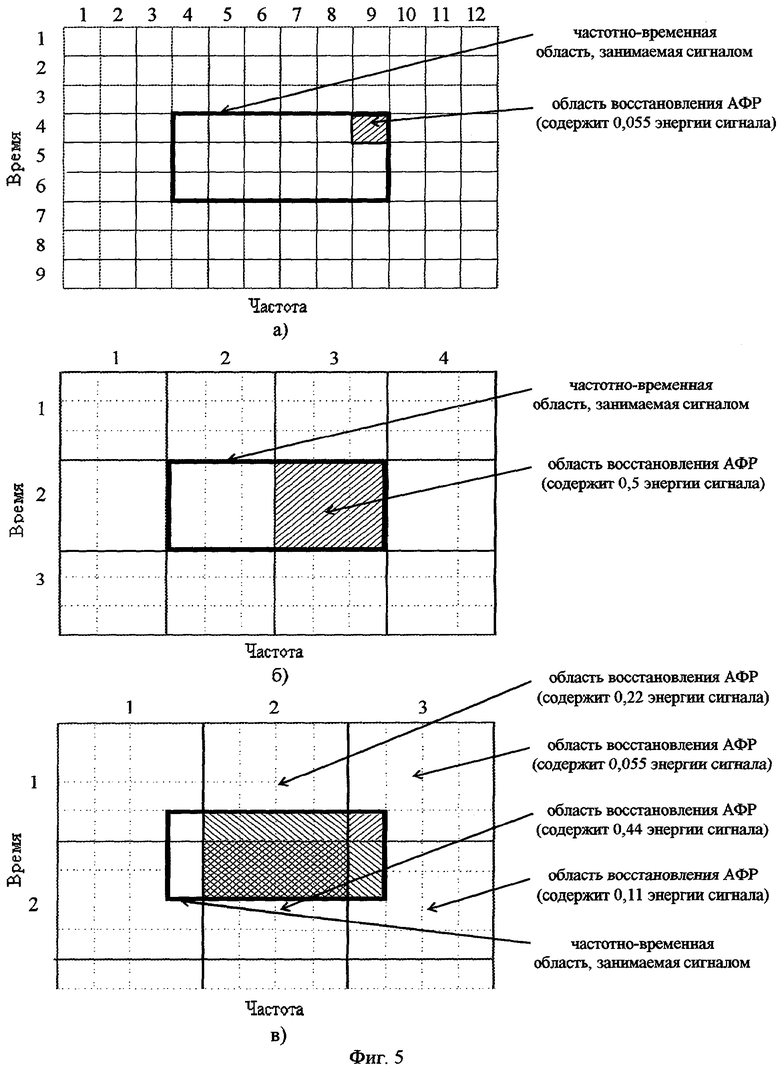
Фиг.5. Частотно-временные области, занимаемые сформированными АФР и локализуемым сигналом.
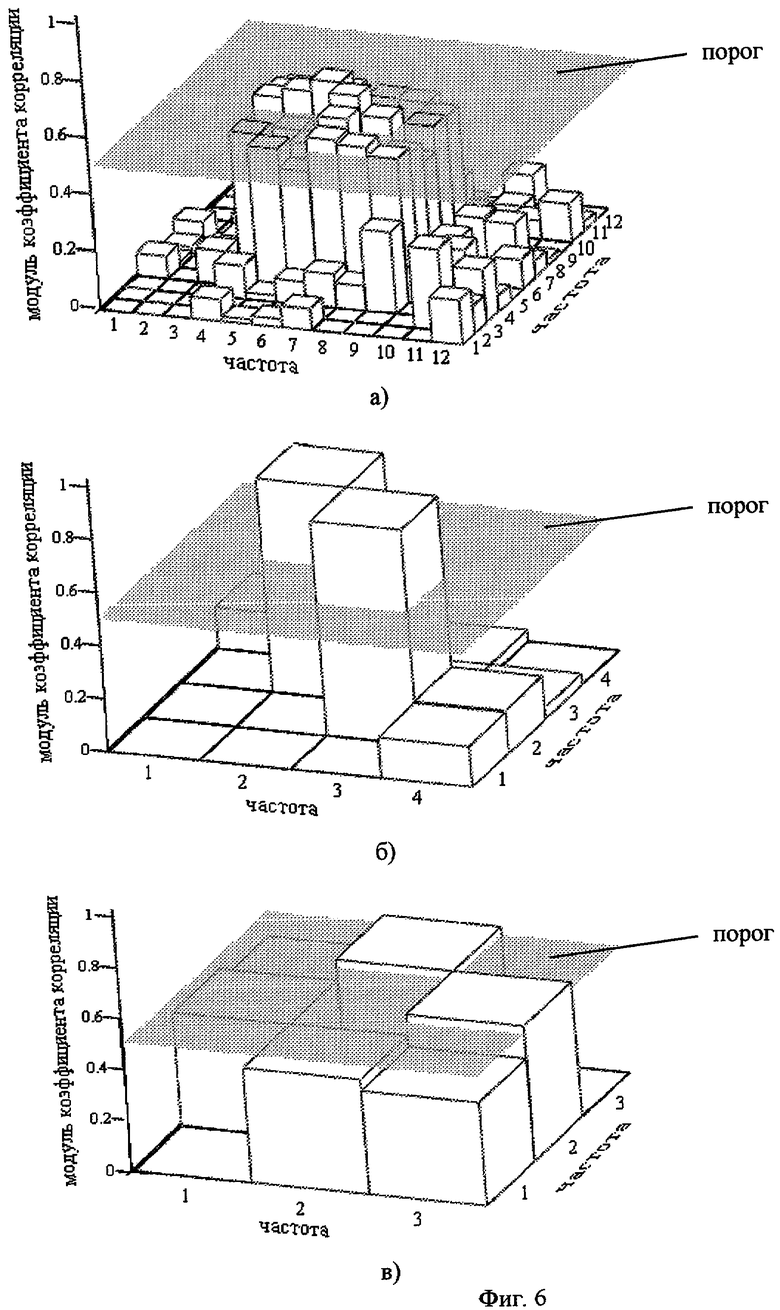
Фиг.6. Модули коэффициентов взаимной корреляции АФР, сформированных в отличающихся частотно-временных областях:
фиг.6а - область формирования АФР содержит 0,055 энергии сигнала (фиг.5а);
фиг.6б - область формирования АФР содержит 0,5 энергии сигнала (фиг.5б);
фиг.6в - область формирования АФР содержит 0,44 энергии сигнала (фиг.5в).
Указанные преимущества, а также особенности настоящего изобретения станут понятными при рассмотрении работы устройства, в котором реализуется предложенный способ со ссылками на прилагаемый чертеж (фиг.1).
Устройство включает последовательно соединенные антенную систему 1, N-канальный преобразователь частоты 2, N-канальный аналого-цифровой преобразователь (АЦП) 3, вычислитель быстрого преобразования Фурье (БПФ) 4, формирователь КМПС 5, вычислитель АФР 6, устройство обнаружения и локализации 7, формирователь КМОС 8, устройство измерения угловых координат 9 и блок отображения 10. Выход вычислителя 4 также подключен ко второму входу формирователя КМОС 8.
Антенная система 1 содержит N антенн с номерами n=1...N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Преобразователь частоты 2 выполнен в N-канальном варианте с общим гетеродином и с полосой пропускания каждого канала, во много раз превышающей ширину спектра одиночного сигнала передатчика. Общий гетеродин обеспечивает N-канальный когерентный прием сигналов, что является основным условием регистрации относительной разности фаз сигналов, принимаемых совокупностью антенн. Кроме этого, преобразователь 2 обеспечивает калибровку по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Если разрядность и быстродействие N-канального АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, при построении радиоизображения в KB диапазоне, то вместо преобразователя 2 могут использоваться частотно избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Вычислитель 4, формирователь 5, вычислитель 6, устройство 7, формирователь 8, устройство 9 построены по многоканальной схеме, которая обеспечивает максимальное быстродействие благодаря параллельной обработке сигналов.
Вычислитель 4 содержит N параллельных модулей БПФ, каждый из которых содержит буферное оперативное запоминающее устройство (БОЗУ), рассчитанное на хранение спектральных плотностей, полученных на  временных отрезках преобразования.
временных отрезках преобразования.
Формирователь 5 содержит  параллельных модулей формирования КМПС.
параллельных модулей формирования КМПС.
Вычислитель 6 содержит Z параллельных модулей формирования АФР.
Устройство 7 содержит Z параллельных модулей корреляции и блок сравнения.
Формирователь 8 содержит Р модулей формирования КМОС.Устройство 9 содержит Р модулей вычисления угловых координат.
Работает устройство, реализующее способ обнаружения и локализации сложных сигналов, следующим образом.
Многочастотные временные сигналы xn(t} с выхода антенной системы 1 от антенн с номерами n=1...N, входящих в решетку, поступают на входы преобразователя 2 в полосе приема, во много раз превышающей ширину спектра одиночного сигнала передатчика, и когерентно переносятся на более низкую частоту.
С помощью АЦП 3 преобразованные по частоте сигналы xn(t) синхронно преобразуются в цифровые сигналы xn(z), где n - номер антенны, a z - номер временного отсчета сигнала.
В каждом из N модулей вычислителя 4 скользящим во времени преобразованием цифровых сигналов xn(z) с заданной дискретностью по времени и частоте получаются и запоминаются комплексные спектральные плотности сигнала каждой антенны, где q - номер временного отрезка преобразования,  a l - номер частотного отсчета,
a l - номер частотного отсчета, 
Получение спектральной плотности  возможно применением гребенки цифровых фильтров или, что, как правило, более эффективно с вычислительной точки зрения, алгоритма БПФ, реализующего дискретное Фурье-преобразование q-го временного отрезка сигнала каждой антенны
возможно применением гребенки цифровых фильтров или, что, как правило, более эффективно с вычислительной точки зрения, алгоритма БПФ, реализующего дискретное Фурье-преобразование q-го временного отрезка сигнала каждой антенны  где
где  - оператор прямого дискретного Фурье-преобразования по времени [5].
- оператор прямого дискретного Фурье-преобразования по времени [5].
Для обеспечения требуемой детальности скользящего получения спектральной плотности по времени q-й и (q+1)-й отрезки преобразования сигнала выбираются с необходимым перекрытием.
В результате выполнения этой операции формируется и запоминается частотно-временная матрица  N-мерных векторов спектральных плотностей
N-мерных векторов спектральных плотностей  с элементами
с элементами 
Полученные в вычислителе 4 спектральные плотности передаются в формирователь 5, который включает  модулей.
модулей.
В модулях формирователя 5 из спектральных плотностей  формируются пространственные корреляционные матрицы принятых сигналов (КМПС) размером N×N в отличающихся положением (q, l) и размерами (Q, L) частотно-временных элементах области приема, где Q,
формируются пространственные корреляционные матрицы принятых сигналов (КМПС) размером N×N в отличающихся положением (q, l) и размерами (Q, L) частотно-временных элементах области приема, где Q, 
 - размеры элементов по времени и по частоте соответственно.
- размеры элементов по времени и по частоте соответственно.
В каждом из Z модулей формирователя 5 формируется  матриц для фиксированных значений Q и L в отличающихся положением (q, l) частотно-временных элементах области приема. Эти матрицы могут формироваться последовательно или параллельно. В последнем случае отдельный модуль формирователя 5 должен быть построен по параллельной схеме и содержать ξ вычислителей, что с целью упрощения на фиг.1 не показано.
матриц для фиксированных значений Q и L в отличающихся положением (q, l) частотно-временных элементах области приема. Эти матрицы могут формироваться последовательно или параллельно. В последнем случае отдельный модуль формирователя 5 должен быть построен по параллельной схеме и содержать ξ вычислителей, что с целью упрощения на фиг.1 не показано.
При этом в каждом модуле формирователя 5 каждая из ξ матриц формируется по следующей формуле:
где j - номер временного элемента размером Q,  r - номер частотного элемента размером L,
r - номер частотного элемента размером L,  a
a  - пространственная корреляционная матрица принятых сигналов для q-го элемента по времени и l-го элемента по частоте единичного размера (Q=L=1) с элементами
- пространственная корреляционная матрица принятых сигналов для q-го элемента по времени и l-го элемента по частоте единичного размера (Q=L=1) с элементами  1≤n'≤N.
1≤n'≤N.
Для большей наглядности на фиг.2 в качестве примера представлена структура КМПС, формируемой отдельным модулем формирователя 5 в (q, l)-м частотно-временном элементе размером {Q=1, L=1).
Совокупность КМПС, формируемых отдельным модулем формирователя 5 в отличающихся положением (q, l) частотно-временных элементах минимального размера (Q=1, L=1), приведена на фиг.3, а в частотно-временных элементах размером {Q=1, L=2) - на фиг.4.
Таким образом, в формирователе 5 одновременно формируются 
Полученные в формирователе 5 КМПС поступают в вычислитель 6, который также включает  модулей.
модулей.
В каждом из Z модулей вычислителя 6 сформированные КМПС преобразуются для формирования амплитудно-фазового распределения (АФР) сигналов в каждом частотно-временном элементе.
В каждом модуле вычислителя 6 для фиксированных значений Q и L формируется блочная матрица размером  элементами которой являются АФР
элементами которой являются АФР  сформированные в отличающихся положением (j, r) частотно-временных элементах размером (Q, L).
сформированные в отличающихся положением (j, r) частотно-временных элементах размером (Q, L).
Элементы блочной матрицы могут формироваться последовательно или параллельно. В последнем случае отдельный модуль вычислителя 6 строится по параллельной схеме и содержит ξ вычислителей, что с целью упрощения на фиг.1 также не показано.
В каждом модуле вычислителя 6 во всех частотно-временных элементах {j, r) для фиксированных значений Q и L преобразованием соответствующих КМПС одновременно формируются амплитудно-фазовые распределения (АФР)  При этом вычисляется собственный вектор, соответствующий максимальному собственному значению соответствующей КМПС. Полученный собственный вектор выбирается в качестве АФР.
При этом вычисляется собственный вектор, соответствующий максимальному собственному значению соответствующей КМПС. Полученный собственный вектор выбирается в качестве АФР.
Выбор собственного вектора КМПС в качестве АФР обеспечивает использование максимально возможной информации, содержащейся в принятых сигналах. Это в свою очередь снижает пороговое отношение сигнал/шум на последующих этапах обработки сигналов при их обнаружении и локализации.
Отдельная строка каждой N×N-размерной КМПС может рассматриваться как многочастотная радиоголограмма  представляющая собой N-мерный вектор с элементами в виде усредненных по времени и частоте взаимных спектральных плотностей
представляющая собой N-мерный вектор с элементами в виде усредненных по времени и частоте взаимных спектральных плотностей  В связи с этим для повышения скорости обнаружения и локализации сигналов в вычислителе 6 в качестве АФР выбирается отдельная строка КМПС (см. отдельную строку КМПС при (Q=1, L=1) на фиг.2).
В связи с этим для повышения скорости обнаружения и локализации сигналов в вычислителе 6 в качестве АФР выбирается отдельная строка КМПС (см. отдельную строку КМПС при (Q=1, L=1) на фиг.2).
Таким образом, в результате данной совокупности операций в вычислителе 6 получается  блочных матриц
блочных матриц  размером
размером  элементами которых являются АФР
элементами которых являются АФР  сформированные в отличающихся положением (j, r) частотно-временных элементах размером (Q, L). Сформированные АФР
сформированные в отличающихся положением (j, r) частотно-временных элементах размером (Q, L). Сформированные АФР  поступают в устройство обнаружения и локализации 7.
поступают в устройство обнаружения и локализации 7.
В устройстве 7 выполняется идентификация сформированных АФР и согласовываются частотно-временные области, занимаемые сформированными АФР и спектром локализуемого сигнала. В результате этих операций принимаются решения об обнаружении сигналов и определяются частотно-временные области локализации каждого обнаруженного сигнала.
Для этого в каждом из Z блоков устройства 7 для фиксированных значений Q и L выполняется взаимная корреляция АФР  и
и  сформированных в различных частотно-временных элементах
сформированных в различных частотно-временных элементах  и
и  где
где 
 r'≠r, j'≠j. Для этого сформированные АФР
r'≠r, j'≠j. Для этого сформированные АФР  нормируются
нормируются  и получаются
и получаются  блочных матриц
блочных матриц  размером
размером  с элементами в виде нормированных АФР
с элементами в виде нормированных АФР 
В каждом из Z блоков устройства 7 для каждой из Z блочных матриц  отличающихся размерами (Q, L) частотно-временных элементов формирования АФР
отличающихся размерами (Q, L) частотно-временных элементов формирования АФР 
- строится  -размерная блочная матрица
-размерная блочная матрица  (коэффициентов корреляции нормированных АФР.
(коэффициентов корреляции нормированных АФР.
Элементы блочной матрицы  определяются скалярным произведением
определяются скалярным произведением  В свою очередь элементы
В свою очередь элементы  матрицы
матрицы  вычисляются по формуле
вычисляются по формуле  которая в развернутой форме имеет вид
которая в развернутой форме имеет вид 
- сравниваются модули коэффициентов корреляции (элементы матриц  ) с порогом и сигналы спектральных плотностей
) с порогом и сигналы спектральных плотностей  , соответствующие элементам, в которых превышен порог, предварительно объединяются в νQ,L-й сигнал, где νQ,L=1...ΠQ,L, ΠQ,L - число обнаруженных сигналов, отличающихся размерами (Q, L) частотно-временных элементов локализации и угловыми координатами, и формируется бинарная (двоичные числа
, соответствующие элементам, в которых превышен порог, предварительно объединяются в νQ,L-й сигнал, где νQ,L=1...ΠQ,L, ΠQ,L - число обнаруженных сигналов, отличающихся размерами (Q, L) частотно-временных элементов локализации и угловыми координатами, и формируется бинарная (двоичные числа  - соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица его локализации, описывающая закон изменения энергии сигнала по частоте и времени;
- соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица его локализации, описывающая закон изменения энергии сигнала по частоте и времени;
- для каждого обнаруженного νQ,L-го сигнала определяется среднее значение модулей коэффициентов корреляции (элементов матриц  ), превысивших заданный порог корреляции. Значение порога корреляции зависит от числа элементов антенной решетки и выбирается из условия минимизации вероятности ложных тревог.
), превысивших заданный порог корреляции. Значение порога корреляции зависит от числа элементов антенной решетки и выбирается из условия минимизации вероятности ложных тревог.
Средние значения модулей коэффициентов корреляции, превысивших заданный порог, каждого обнаруженного νQ,L-го сигнала поступают в блок сравнения устройства 7.
В блоке сравнения устройства 7 выбираются частотно-временные области, обеспечивающие максимальное отношение сигнал/шум взаимного корреляционного отклика (среднего значения модулей коэффициентов корреляции), что эквивалентно согласованию частотно-временных областей формирования идентифицируемых элементов АФР и частотно-временной области, занимаемой спектром мощности локализуемого сигнала.
Для этого сравниваются частотно-временные области локализации νQ,L-x сигналов, обнаруженных при различных значениях интервалов усреднения (Q, L), и сигналы с перекрывающимися областями объединяются в i-ю группу, где i=1...P, Р - число групп. В каждой i-й группе отбирается сигнал с максимальным корреляционным откликом, который идентифицируется как i-й обнаруженный сигнал, где i=1...Р, Р - число обнаруженных сигналов. Для каждого i-го сигнала формируется бинарная (двоичные числа  - соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица его локализации, описывающая закон изменения энергии сигнала по частоте и времени. Бинарная частотно-временная матрица формируется таким образом, чтобы выполнялось условие
- соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица его локализации, описывающая закон изменения энергии сигнала по частоте и времени. Бинарная частотно-временная матрица формируется таким образом, чтобы выполнялось условие  для тех частотно-временных элементов, которые принадлежат частотно-временным областям локализации i-го сигнала, коэффициент корреляции которых превышает заданный порог, в противном случае
для тех частотно-временных элементов, которые принадлежат частотно-временным областям локализации i-го сигнала, коэффициент корреляции которых превышает заданный порог, в противном случае 
Операции корреляции и согласования повышают энергетическую эффективность обнаружения и частотно-временной локализации сложных одночастотных и многочастотных сигналов с низкой спектральной плотностью мощности.
На фиг.5 представлены варианты разбиения частотно-временной области приема, содержащей локализуемый сигнал, на частотно-временные элементы. При частотно-временных элементах минимального размера Q=L=1 область формирования АФР содержит всего 0,055 энергии сигнала (фиг.5а). При частотно-временных элементах с размером элемента Q=3 и L=3 (фиг.5б) область формирования АФР содержит 0,5 энергии сигнала, что представляет собой пример наилучшего согласования частотно-временных элементов формирования АФР и частотно-временной области, занимаемой спектром мощности локализуемого сигнала. Частотно-временные элементы размером Q=4 и L=4 также являются несогласованными с областью, занимаемой спектром мощности локализуемого сигнала, так как содержат 0,22, 0,055, 0,44 и 0,11 энергии сигнала (фиг.5в).
На фиг.6а представлены модули коэффициентов взаимной корреляции, сформированные в результате вычисления взаимной корреляции АФР элементов 4-й строки частотно-временной области формирования АФР, представленной на фиг.5а. Физически это соответствует формированию коэффициентов взаимной корреляции АФР только в частотной области для фиксированного интервала времени, интервал под номером 4 (фиг.5а).
На фиг.6б представлены модули коэффициентов взаимной корреляции, сформированные в результате вычисления взаимной корреляции АФР элементов 2-й строки для примера, представленного на фиг.5б.
На фиг.6в представлены модули коэффициентов взаимной корреляции, сформированные в результате вычисления взаимной корреляции АФР элементов 2-й строки для примера, представленного на фиг.5в.
Как видно из чертежей, согласование частотно-временных элементов формирования АФР и частотно-временной области, занимаемой спектром мощности локализуемого сигнала, достигается для частотно-временных элементов размером Q=L=3 (фиг.5б), что соответствует максимальному корреляционному отклику (фиг.6б).
Таким образом, на данном этапе входной поток сигналов разделяется по пространственному признаку. В анализируемой частотно-временной области обнаруживаются все сигналы, отличающиеся угловыми координатами. Для каждого обнаруженного сигнала определяется бинарная (двоичные числа  - соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица локализации сигнала, которая поступает в формирователь пространственных корреляционных матриц обнаруженных сигналов (КМОС) 8.
- соответствует наличию излучения, а 0 - соответствует отсутствию излучения) частотно-временная матрица локализации сигнала, которая поступает в формирователь пространственных корреляционных матриц обнаруженных сигналов (КМОС) 8.
В каждом из Р модулей формирователя 8 рассчитывают КМОС каждого i-го обнаруженного сигнала. Для этого используются спектральные плотности  принадлежащие выявленным областям локализации каждого i-го обнаруженного сигнала и поступающие из вычислителя 4, из которых вначале формируются корреляционные матрицы принятых сигналов W(q, l) для частотно-временных элементов единичного размера, принадлежащих выявленным частотно-временным областям локализации обнаруженного сигнала. После этого КМОС вычисляется суммированием полученных матриц W(q, l) по частотно-временным элементам (q, l), для которых выполняется условие
принадлежащие выявленным областям локализации каждого i-го обнаруженного сигнала и поступающие из вычислителя 4, из которых вначале формируются корреляционные матрицы принятых сигналов W(q, l) для частотно-временных элементов единичного размера, принадлежащих выявленным частотно-временным областям локализации обнаруженного сигнала. После этого КМОС вычисляется суммированием полученных матриц W(q, l) по частотно-временным элементам (q, l), для которых выполняется условие 
Вычисленная КМОС каждого i-го сигнала поступает в устройство 9.
В каждом из Р модулей устройства 9 определяются азимутальные и угломестные направления прихода i-го обнаруженного сигнала. Для этого преобразуется КМОС i-го сигнала по одному из известных алгоритмов высокого разрешения, относящихся к подклассу алгоритмов, основанных на анализе собственных значений. К подклассу алгоритмов формирования радиоизображений с высокой разрешающей способностью, основанных на анализе собственных значений пространственной корреляционной матрицы, относятся, например, алгоритмы MUSIC (multiple signal classification) и EV (eigenvector) [4].
В результате преобразования КМОС i-го сигнала формируется радиоизображение двумерного углового спектра сигнала, по максимумам которого определяют угломестные и азимутальные направления его прихода.
Для повышения эффективности определения направлений прихода коррелированных сигналов в каждом из Р модулей устройства 9 в качестве АФР выбирается собственный вектор КМОС, по которому с использованием подкласса алгоритмов высокого разрешения, основанных на регуляризации [6], определяются углы прихода обнаруженного сигнала.
Для повышения скорости определения направлений прихода сигналов в каждом из Р модулей устройства 9 в качестве АФР выбирается отдельная строка КМОС, по которой с использованием подкласса алгоритмов высокого разрешения, основанных на регуляризации, определяются направления прихода каждого обнаруженного сигнала.
Кроме того, в каждом из Р модулей устройства 9 для повышения точности и достоверности определения направлений прихода каждого обнаруженного сигнала сопоставляются азимутальные и угломестные направления прихода каждого обнаруженного сигнала, полученные алгоритмами высокого разрешения различных подклассов. Совпавшие с заданным допуском направления прихода сигнала усредняются и используются в качестве достоверных направлений.
В блоке отображения 10 для повышения информативности отображаются с использованием географической карты местности параметры обнаруженных передатчиков, включая частотно-временную область, занимаемую обнаруженным сигналом, а также азимут и угол места передатчика.
Таким образом, выполнение перечисленных действий над сигналами обеспечивает существенное повышение эффективности обнаружения и локализации по частоте, времени, азимуту и углу места более широкого класса сложных сигналов в условиях, когда априорно неизвестны форма и области существования контролируемых сигналов. Повышение эффективности достигается за счет:
- оптимизации формирования АФР как на этапах обнаружения и локализации, так и на этапе измерения углов прихода сигналов;
- согласования частотно-временной области, занимаемой спектром мощности обнаруживаемого сигнала, и частотно-временной области формирования коррелируемых АФР;
- сопоставления направлений прихода сигналов, получаемых алгоритмами высокого разрешения различных подклассов, минимизирующих потери мощности при обнаружении и пеленговании сигналов, а также исключающих аномальные ошибки пеленгования и, как следствие, существенно повышающих различимость сложных одночастотных и многочастотных сигналов с низкой спектральной плотностью мощности на фоне шумов и помех.
Так, например, энергетический выигрыш по сравнению с прототипом, достигаемый только за счет операций согласования частотных областей при обнаружении и локализации сигнала, достигает величины  где
где  - ширина спектра обнаруживаемого сигнала, δƒ- ширина дискреты анализа по частоте. При Fс=50 кГц и
- ширина спектра обнаруживаемого сигнала, δƒ- ширина дискреты анализа по частоте. При Fс=50 кГц и  получаем В=15,80 раз (11,98 дБ).
получаем В=15,80 раз (11,98 дБ).
Источники информации
1. US, патент, 5955993, кл. G 01 S 3/02, 1999 г.
2. RU, патент, 2190236, кл. G 01 S 5/04, 2002 г.
3. Диксон Р.К. Широкополосные системы. - М.: Связь, 1979.
4. Джонсон Д.Х. Применение методов спектрального оценивания к задачам определения угловых координат источников излучения// ТИИЭР. - 1982. - Т.70. №9. - С.126.
5. Марпл.-мл. С.Л. Цифровой спектральный анализ и его применения. - М.: Мир, 1990. - 584 с.
6. Шевченко В.Н. Оценивание углового положения источников когерентных сигналов на основе методов регуляризации// Радиотехника. - 2003. - №9. - С.3-10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ СО СКАЧКООБРАЗНЫМ ИЗМЕНЕНИЕМ ЧАСТОТЫ | 2004 |
|
RU2285936C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ШИРОКОПОЛОСНЫХ РАДИОСИГНАЛОВ | 2009 |
|
RU2410707C2 |
| СПОСОБ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ-ПЕЛЕНГОВАНИЯ СИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 2005 |
|
RU2291456C1 |
| СПОСОБ ПОИСКА ПЕРЕДАТЧИКОВ СЛОЖНЫХ СИГНАЛОВ | 2006 |
|
RU2319976C1 |
| СПОСОБ ПОИСКА СЛОЖНЫХ СИГНАЛОВ | 2009 |
|
RU2413236C1 |
| СПОСОБ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКОЙ ЛОКАЛИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 2006 |
|
RU2316015C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ОБЪЕКТОВ ПО ИЗЛУЧЕНИЯМ ИХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2309423C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОЙ ЛОКАЛИЗАЦИИ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2008 |
|
RU2385467C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ МНОГОЛУЧЕВЫХ СИГНАЛОВ | 2005 |
|
RU2309422C2 |
Изобретение относится к радиотехнике и может быть использовано в пассивных системах радиоконтроля для обнаружения и локализации по частоте, времени, азимуту и углу места сложных сигналов в условиях априорной неопределенности относительно их формы и областей существования. Техническим результатом изобретения является повышение эффективности обнаружения и локализации по частоте, времени, азимуту и углу места трех основных классов сложных сигналов. Технический результат достигается за счет оптимизации формирования амплитудно-фазового распределения (АФР) на этапах обнаружения и локализации сигналов, согласования частотно-временных областей, занимаемых спектром мощности обнаруживаемого сигнала и коррелируемых АФР, и сопоставления направлений прихода сигналов, формируемых алгоритмами высокого разрешения различных подклассов. В результате минимизируются потери мощности сигналов при обнаружении и пеленговании, а также исключаются аномальные ошибки пеленгования и, как следствие, существенно повышается различимость сложных одночастотных и многочастотных сигналов с низкой спектральной плотностью мощности на фоне шумов и помех. 4 з.п. ф-лы, 6 ил.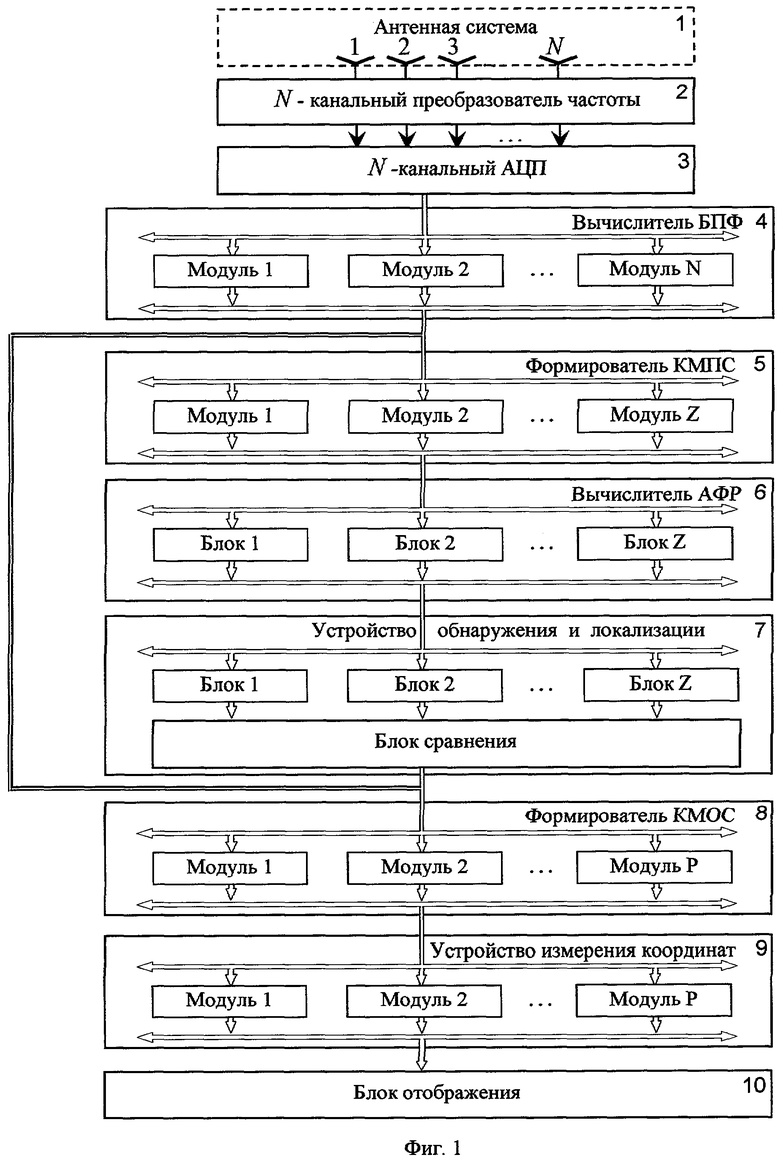
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| DE 3215479, 18.08.1988 | |||
| EP 1471365 A1, 27.10.2004 | |||
| US 6806828 B1, 19.10.2004. | |||

